
Robust Single-Image Tree Diameter Estimation with Mobile Phones


Abstract
:1. Introduction
2. Materials and Methods
2.1. Assumptions
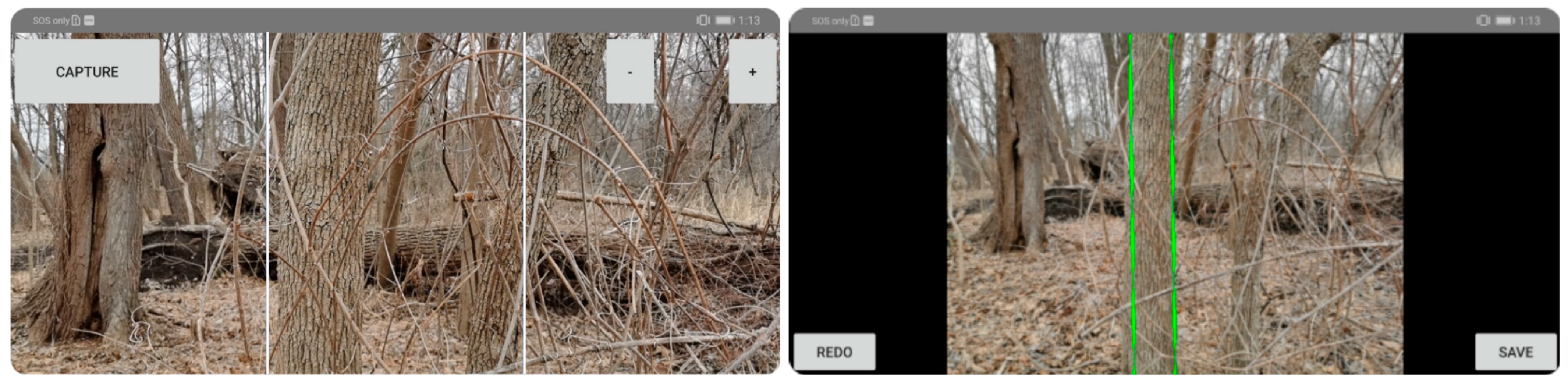
2.2. App Design and User Experience
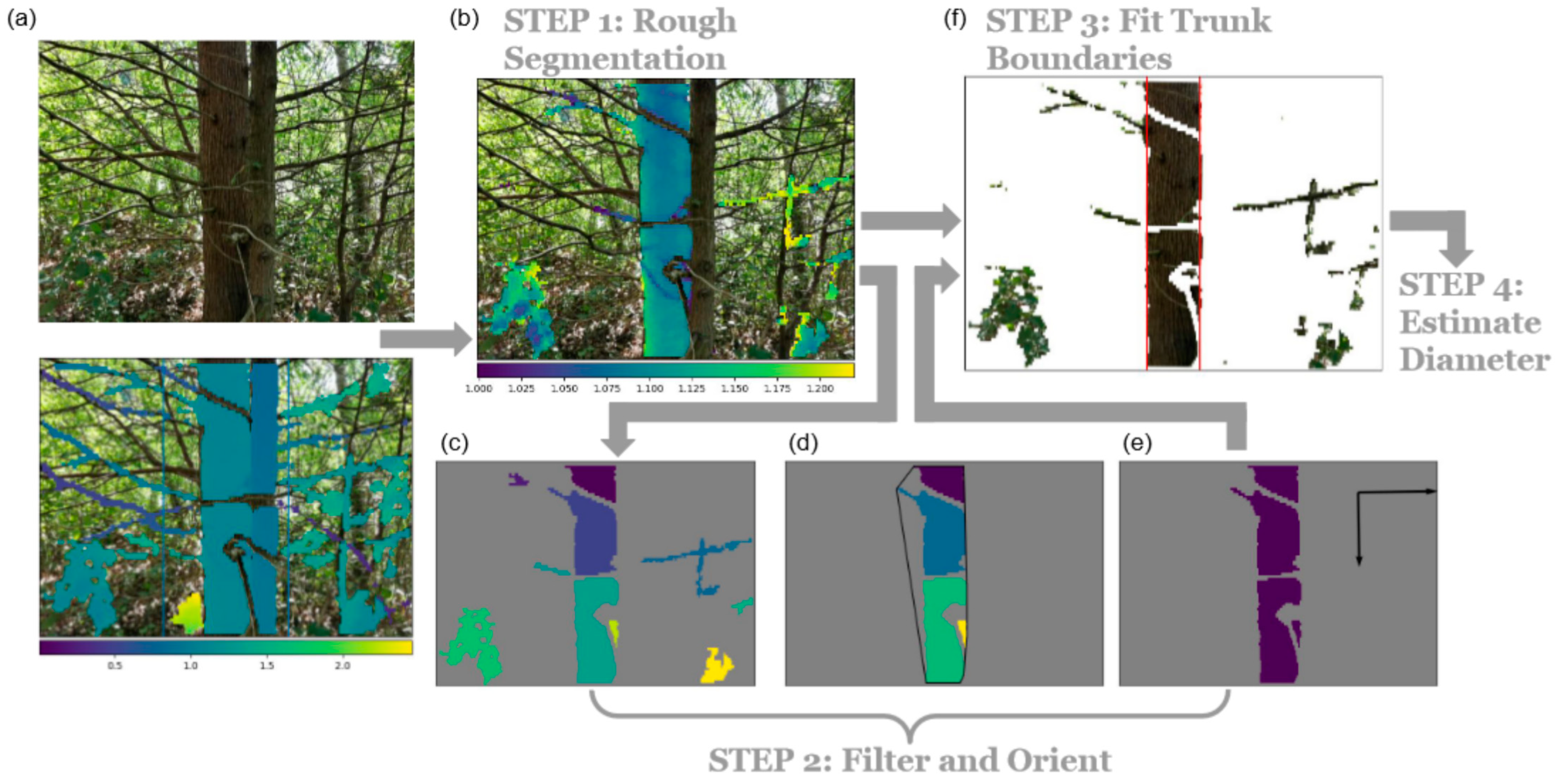
2.3. Image Processing Algorithm
2.3.1. Step 1: Approximate Trunk Depth
2.3.2. Step 2: Filter & Orient Trunk Pixels
2.3.3. Step 3: Identify Trunk Boundaries
2.3.4. Step 4: Estimate Diameter
2.4. App Evaluation
2.4.1. Mobile Phone Hardware
2.4.2. Measurement Environment and Procedure
3. Results
3.1. Trunk Detection
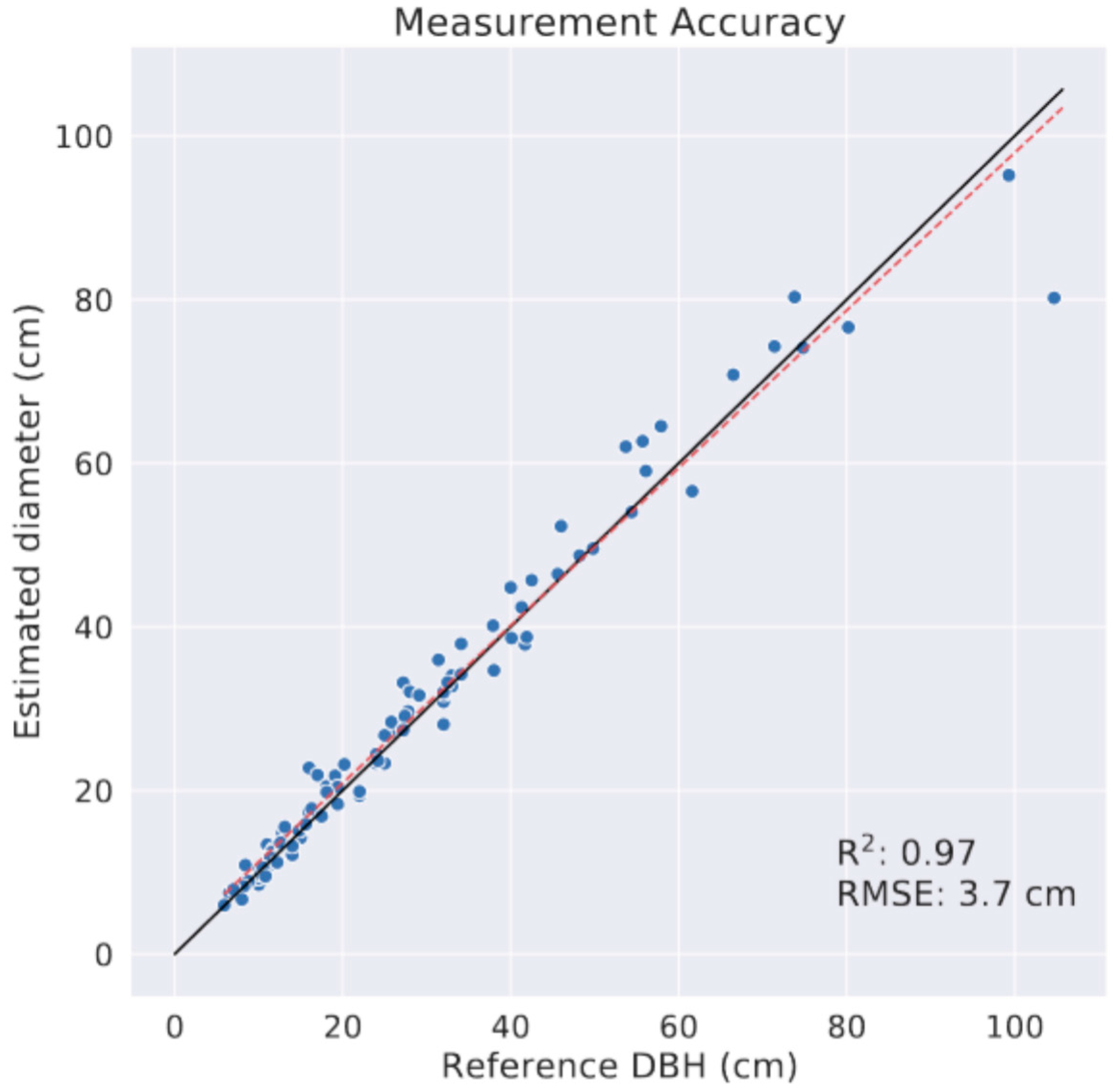
3.2. Accuracy
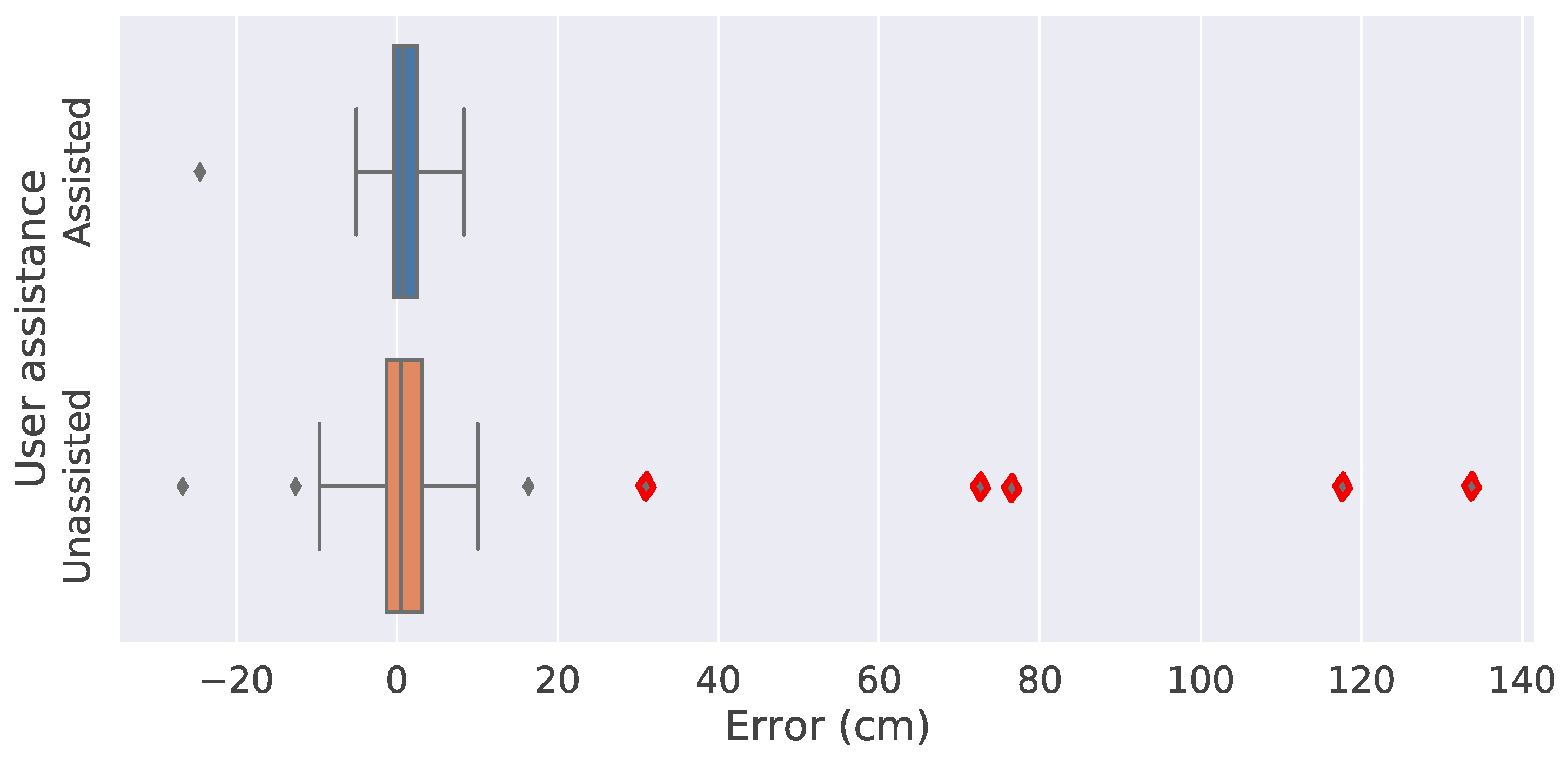
3.3. Data Collection Time and Ease of Use
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Algorithm Assumptions
- The tree is within degrees of vertical: PCA yields two perpendicular eigenvectors, whose orders are not guaranteed to be related to the true principal axis of the trunk. We, therefore, assume that the correct eigenvector is within 45 degrees of the vertical. This assumption seems reasonable for most trees.
- The tree does not lean steeply toward or away from the camera: If the tree is leaning toward or away from the camera, rather than on a plane perpendicular to it, we will not be able to successfully find the orientation of the tree. This will affect the angle of the diameter line and may cause errors in fitting a vertical boundary to the trunk. Moreover, we will filter out too many of the true trunk points in the 10% filter. Although it is not straightforward to detect that an image has this problem, we can instruct the user to take pictures (in which this is not the case). It may be interesting to observe that we realized this limitation only after the evaluation data sets were collected, and none of the images had this problem. It may be somewhat unnatural to stand under or over a steep leaning tree in order to take a picture of it, though user studies would be required to confirm this.
- The trunk is roughly cylindrical: We assume that the trunk is roughly cylindrical when fitting boundaries to it and estimating the DBH, although we can handle some amount of irregularity, such as the large burls found on some of our evaluation samples. The IPCC standard manual measurement techniques [6] also make this assumption. However, we believe that the ideal system should not rely heavily on this assumption, and we believe that future work should consider handling such trees.
- The tree has one trunk: We only estimate the diameter for one trunk per image. It would be primarily a UI change to allow multiple trunks for a single tree sample, giving the user an option to “add a trunk to this sample“ after saving the image of the first trunk.
- The tree is small enough to fit within the camera frame at 2–3 m away: At 2 m away, the camera frame can capture a trunk of roughly 2.7 m in diameter. This is nearly three times the maximum tree diameter that we were able to test on. If larger trunks are required, some of the same approaches used to address non-cylindrical trunks could also be used in this context.
Appendix A.2. Filtering Algorithm
| Algorithm A1: Algorithm pseudocode to find dense subset of connected components. |
 |
Appendix A.3. Identifying the Principal Axis of a Tilted Trunk

Appendix A.4. Diameter Estimation

Appendix A.5. Comparison with Prior Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Technology | Single Image per Tree | On-Device Processing | Handles Occlusions | Manual Intervention | Evaluated DBH Range | Reported DBH RMSE |
|---|---|---|---|---|---|---|---|
| This study | Huawei P30 Pro | Yes | Yes | Yes | Optional (retake image) | 6–104 cm | 3.7 cm; 2.7 cm for trunks up to 100 cm. |
| Tatsumi et al. [13] | iPhone 13 Pro/iPad Pro | No | Yes | No | Yes (measure 1.3 m height) | 5–70 cm | 2.27 cm (iPhone)/ 2.32 cm (iPad) |
| Çakir et al. [11] | iPad Pro | No | No | Yes | Yes (remove occlusions) | 31.5–59.7 cm | 2.9 cm (Urban forest)/2.5 cm (Managed forest) |
| Gollob et al. [15] | iPad Pro | No | No | Yes | No | 5–59.9 cm | 3.64 (3D Scanner)/4.51 (Polycam)/3.13 (SiteScape) |
| Hyyppä et al. [32] | Google Tango/ Microsoft Kinect | No | No | Unknown | Yes (image segmentation) | 6.8–50.8 cm | 0.73 cm (Tango)/1.9 cm (Kinect) |
| Mokroš et al. [12] | iPad Pro/ MultiCam Photogrammetry | No | No | Unknown | No | 3.1–74.3 cm | 2.6–3.4 cm (iPad)/6.98 cm (MultiCam) |
| Fan et al. [10] | Google Tango | Yes | Yes | No | No | 6.1–34.5 cm | 1.26 cm |
| Piermattei et al. [16] | Nikon camera | No | No | Yes | No | 6.4–63.9 cm | 1.21–5.07 cm |
| KATAM [17] | Most mobile phones supported | Continuous video | On-device but not real-time | No | No | N/A | Unknown |
Appendix A.6. Sample Images



Appendix A.7. Processing of Outlier Image (1.04 m DBH)

References
- Grimault, J.; Bellassen, V.; Shishlov, I. Key Elements and Challenges in Monitoring, Certifying and Financing Forestry Carbon Projects; Technical Report 58; Institute for Climate Economics (I4CE): Paris, France, 2018. [Google Scholar]
- Land Use: Policies for a Net Zero UK; Technical Report; Committee on Climate Change: London, UK, 2020.
- Mbatu, R.S. REDD+ research: Reviewing the literature, limitations and ways forward. For. Policy Econ. 2016, 73, 140–152. [Google Scholar] [CrossRef]
- Longo, M.; Keller, M.; dos Santos, M.N.; Leitold, V.; Pinagé, E.R.; Baccini, A.; Saatchi, S.; Nogueira, E.M.; Batistella, M.; Morton, D.C. Aboveground biomass variability across intact and degraded forests in the Brazilian Amazon. Glob. Biogeochem. Cycles 2016, 30, 1639–1660. [Google Scholar] [CrossRef] [Green Version]
- Stovall, A.E.L.; Vorster, A.G.; Anderson, R.S.; Evangelista, P.H.; Shugart, H.H. Non-destructive aboveground biomass estimation of coniferous trees using terrestrial LiDAR. Remote Sens. Environ. 2017, 200, 31–42. [Google Scholar] [CrossRef]
- Schlegel, B.; Gayoso, J.; Guerra, J. Manual de Procedimentos para Inventarios de Carbono en Ecosistemas Forestales. Available online: https://www.ccmss.org.mx/wp-content/uploads/2014/10/Manual_de_procedimiento_para_inventarios_de_carbono_en_ecosistemas_forestales.pdf (accessed on 1 November 2022).
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Disney, M.; Boni Vicari, M.; Burt, A.; Calders, K.; Lewis, S.; Raumonen, P.; Wilkes, P. Weighing trees with lasers: Advances, challenges and opportunities. Interface Focus 2018, 8, 20170048. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; Gonzalez de Tanago, J.; Bartholomeus, H.; Brede, B.; Herold, M. Data acquisition considerations for Terrestrial Laser Scanning of forest plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Estimating Tree Position, Diameter at Breast Height, and Tree Height in Real-Time Using a Mobile Phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef] [Green Version]
- Çakir, G.Y.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A. 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban Sci. 2021, 5, 88. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel low-cost mobile mapping systems for forest inventories as terrestrial laser scanning alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Tatsumi, S.; Yamaguchi, K.; Furuya, N. ForestScanner: A mobile application for measuring and mapping trees with LiDAR-equipped iPhone and iPad. Methods Ecol. Evol. 2022. [Google Scholar] [CrossRef]
- Pace, R.; Masini, E.; Giuliarelli, D.; Biagiola, L.; Tomao, A.; Guidolotti, G.; Agrimi, M.; Portoghesi, L.; Angelis, P.D.; Calfapietra, C. Tree Measurements in the Urban Environment: Insights from Traditional and Digital Field Instruments to Smartphone Applications. Arboric. Urban For. 2022, 48, 2. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Piermattei, L.; Karel, W.; Wang, D.; Wieser, M.; Mokroš, M.; Surový, P.; Koreň, M.; Tomaštík, J.; Pfeifer, N.; Hollaus, M. Terrestrial Structure from Motion Photogrammetry for Deriving Forest Inventory Data. Remote Sens. 2019, 11, 950. [Google Scholar] [CrossRef] [Green Version]
- Katam Technologies AB. KATAM™ Forest. 2020. Available online: https://www.katam.se/solutions/forest/ (accessed on 31 March 2021).
- Rehman, H.Z.U.; Lee, S. Automatic Image Alignment Using Principal Component Analysis. IEEE Access 2018, 6, 72063–72072. [Google Scholar] [CrossRef]
- Wu, K.; Otoo, E.; Shoshani, A. Optimizing Connected Component Labeling Algorithms; Lawrence Berkeley National Laboratory: Berkeley, CA, USA, 2005. [Google Scholar]
- Ayari, T.; Radufe, N. Sony’s 3D Time of Flight Sensing Solution in the Huawei P30 pro; Technical Report SP20518; SystemPlus Consulting: Nantes, France, 2020. [Google Scholar]
- Yoshida, J. P30 Pro Teardown Proves Huawei’s Flash Catch-Up. 2019. Available online: https://www.eetimes.eu/p30-pro-teardown-proves-huaweis-flash-catch-up/ (accessed on 1 November 2022).
- Waldron, G.E. Trees of the Carolinian Forest; Boston Mills Press: Erin, ON, Canada, 2003. [Google Scholar]
- Ren, Q. Fuzzy Logic-based Digital Soil Mapping in the Laurel Creek Conservation Area, Waterloo, Ontario. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2012. [Google Scholar]
- The Wildlife Trust for Bedfordshire, C.a.N. Beechwoods. Available online: https://www.wildlifebcn.org/nature-reserves/beechwoods (accessed on 24 October 2021).
- Taylor, C. Most Wanted Invasive Plant Species in Our Natural Areas. Van Cortlandt Park Alliance 2018. Available online: https://vancortlandt.org/2018/11/08/most-wanted-invasive-plant-species-in-our-natural-areas/ (accessed on 31 March 2021).
- United States Geological Survey; National Geospatial Program US Topo: Yonkers, NY, USA, 2019; GNIS Cell Id: 50117. Available online: https://apps.nationalmap.gov/services/ (accessed on 16 January 2023).
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest Inventory with Long Range and High-Speed Personal Laser Scanning (PLS) and Simultaneous Localization and Mapping (SLAM) Technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Paul, K.I.; Larmour, J.S.; Roxburgh, S.H.; England, J.R.; Davies, M.J.; Luck, H.D. Measurements of stem diameter: Implications for individual- and stand-level errors. Environ. Monit. Assess. 2017, 189, 416. [Google Scholar] [CrossRef]
- Liu, C.; Xing, Y.; Duanmu, J.; Tian, X. Evaluating Different Methods for Estimating Diameter at Breast Height from Terrestrial Laser Scanning. Remote Sens. 2018, 10, 513. [Google Scholar] [CrossRef] [Green Version]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.W. Terrestrial Laser Scanning as an Effective Tool to Retrieve Tree Level Height, Crown Width, and Stem Diameter. Remote Sens. 2015, 7, 1877–1896. [Google Scholar] [CrossRef] [Green Version]
- Hyyppä, J.; Virtanen, J.P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information. Forests 2018, 9, 6. [Google Scholar] [CrossRef] [Green Version]






| Name | Location | Season | Leaf-on? | No. Samples | Diameter Range |
|---|---|---|---|---|---|
| Laurel Creek | Waterloo, ON, Canada | Summer | Y | 28 | 8–33 cm |
| Beechwoods | Cambridge, UK | Autumn | Y | 42 | 6–75 cm |
| Van Cortlandt | New York, NY, USA | Winter | N | 29 | 6–105 cm |
| Data Set | No. Samples | RMSE (cm) | Mean Absolute | Bias (cm) | Mean abs. % Error |
|---|---|---|---|---|---|
| Error (cm) | |||||
| Laurel Creek | 26 | 2.2 | 1.5 | 0.2 | 8.2 |
| Beechwoods | 42 | 3.0 | 2.1 | 1.1 | 8.1 |
| Van Cortlandt | 29 | 5.3 | 2.8 | 0.2 | 7.5 |
| Combined | 97 | 3.7 | 2.2 | 0.6 | 8.0 |
| Van Cortlandt | 28 | 2.7 | 2.0 | 1.1 | 6.9 |
| Combined | 96 | 2.7 | 1.9 | 0.9 | 7.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Holcomb, A.; Tong, L.; Keshav, S. Robust Single-Image Tree Diameter Estimation with Mobile Phones. Remote Sens. 2023, 15, 772. https://doi.org/10.3390/rs15030772
Holcomb A, Tong L, Keshav S. Robust Single-Image Tree Diameter Estimation with Mobile Phones. Remote Sensing. 2023; 15(3):772. https://doi.org/10.3390/rs15030772
Chicago/Turabian StyleHolcomb, Amelia, Linzhe Tong, and Srinivasan Keshav. 2023. "Robust Single-Image Tree Diameter Estimation with Mobile Phones" Remote Sensing 15, no. 3: 772. https://doi.org/10.3390/rs15030772