


Adequacy Analysis Using UAV of Heavy Rainfall Disaster Reduction Facilities According to Urban Development in Republic of Korea
Abstract
:1. Introduction
2. Materials and Methods
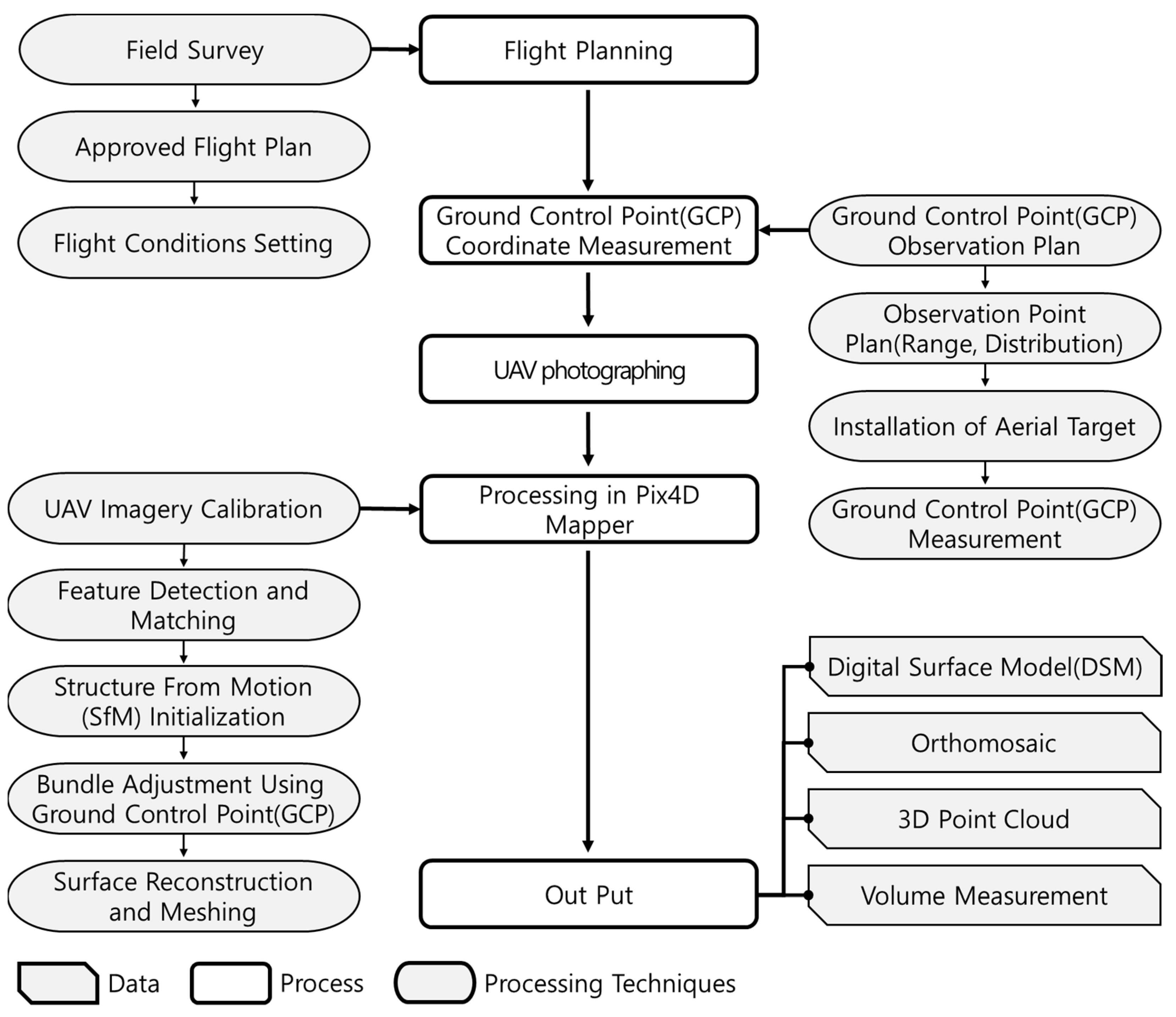
2.1. Analysis Method of Unmanned Aerial Vehicle
2.2. Estimation Method of Discharge
2.3. Analysis Method of Detention Pond
3. Detention Pond Analysis Using Unmanned Aerial Vehicle
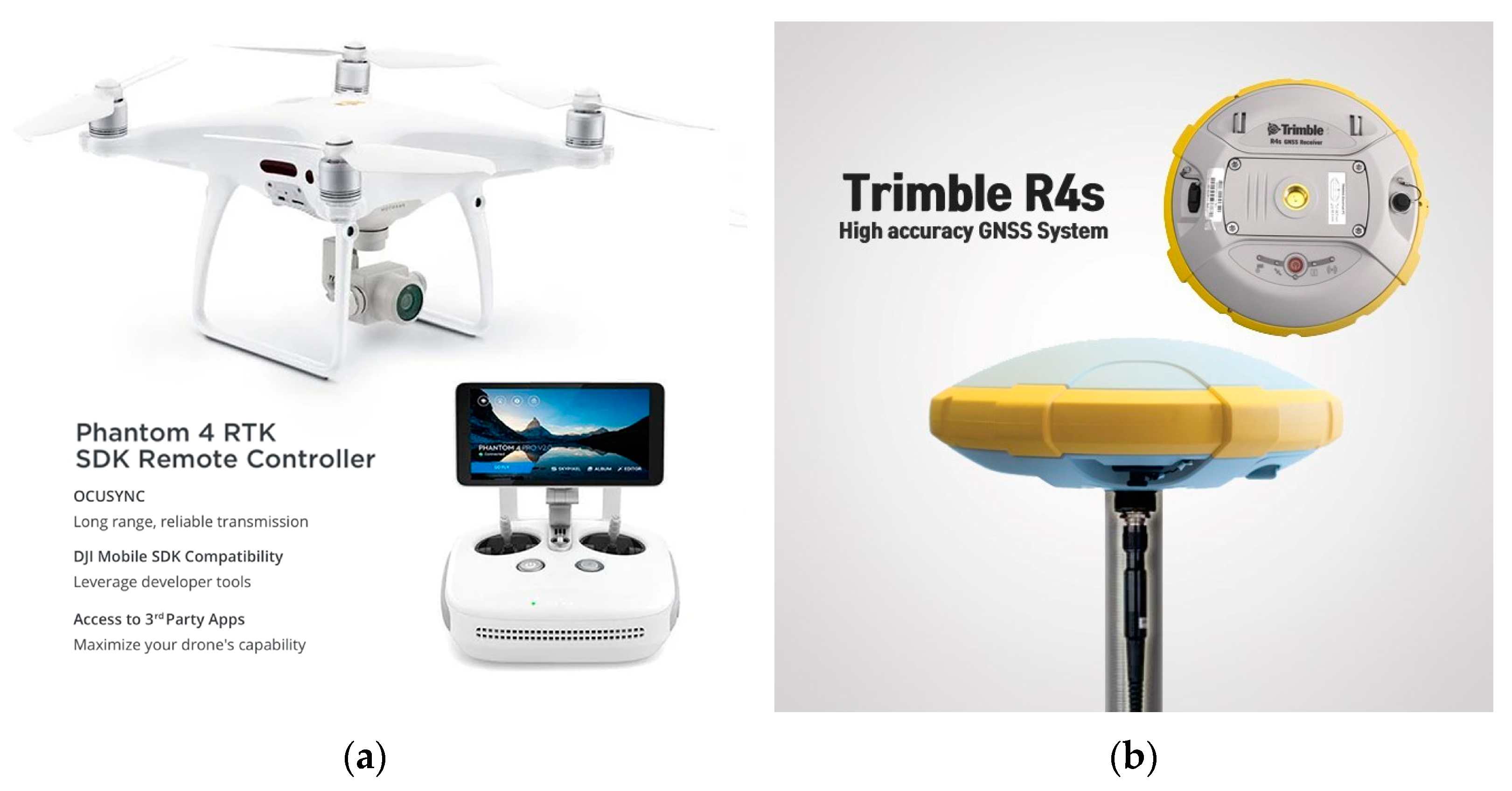
3.1. Target Area and Observation Equipment
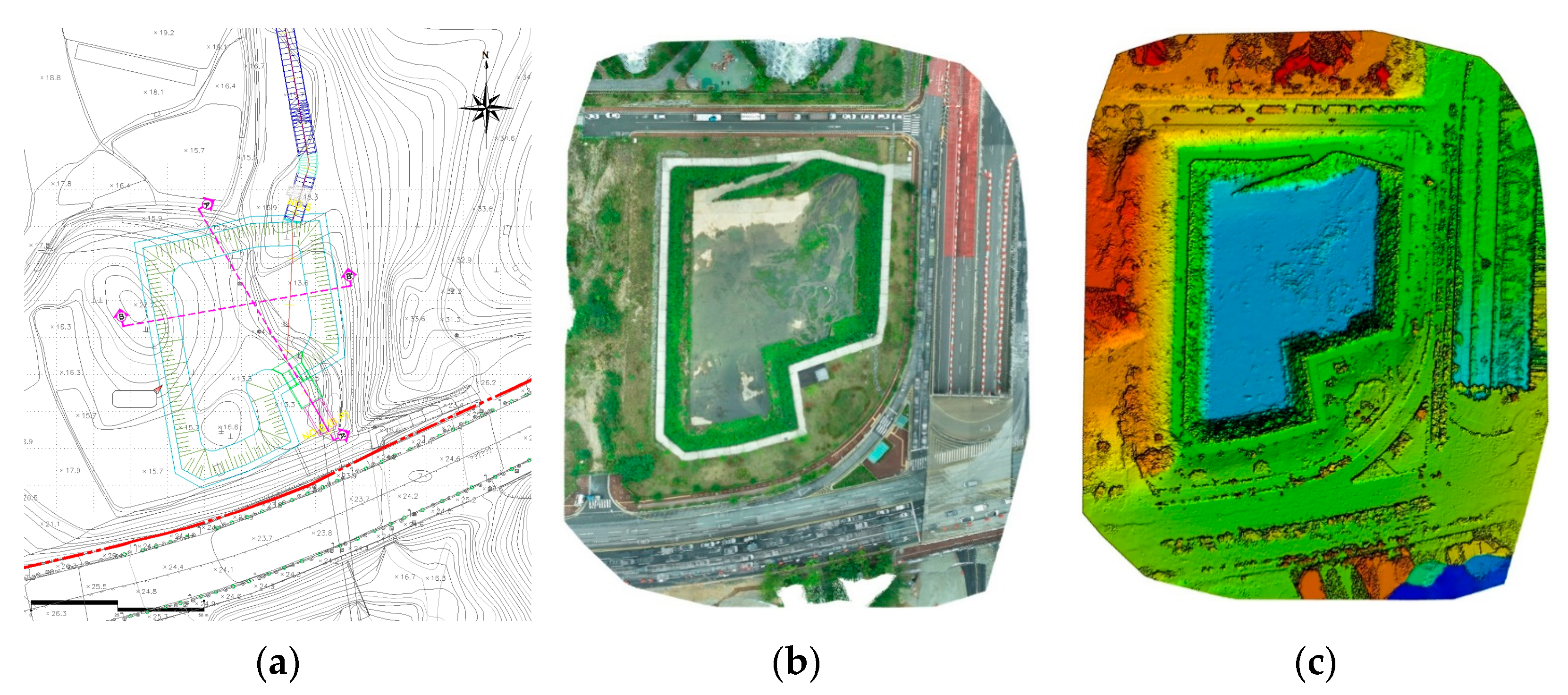
3.2. Survey of Detention Pond Using UAV
3.3. Comparative Analysis of Detention Pond on Design Drawings and Topographical Analysis
4. Analysis of Detention Pond Reduction Effects Due to Urban Development
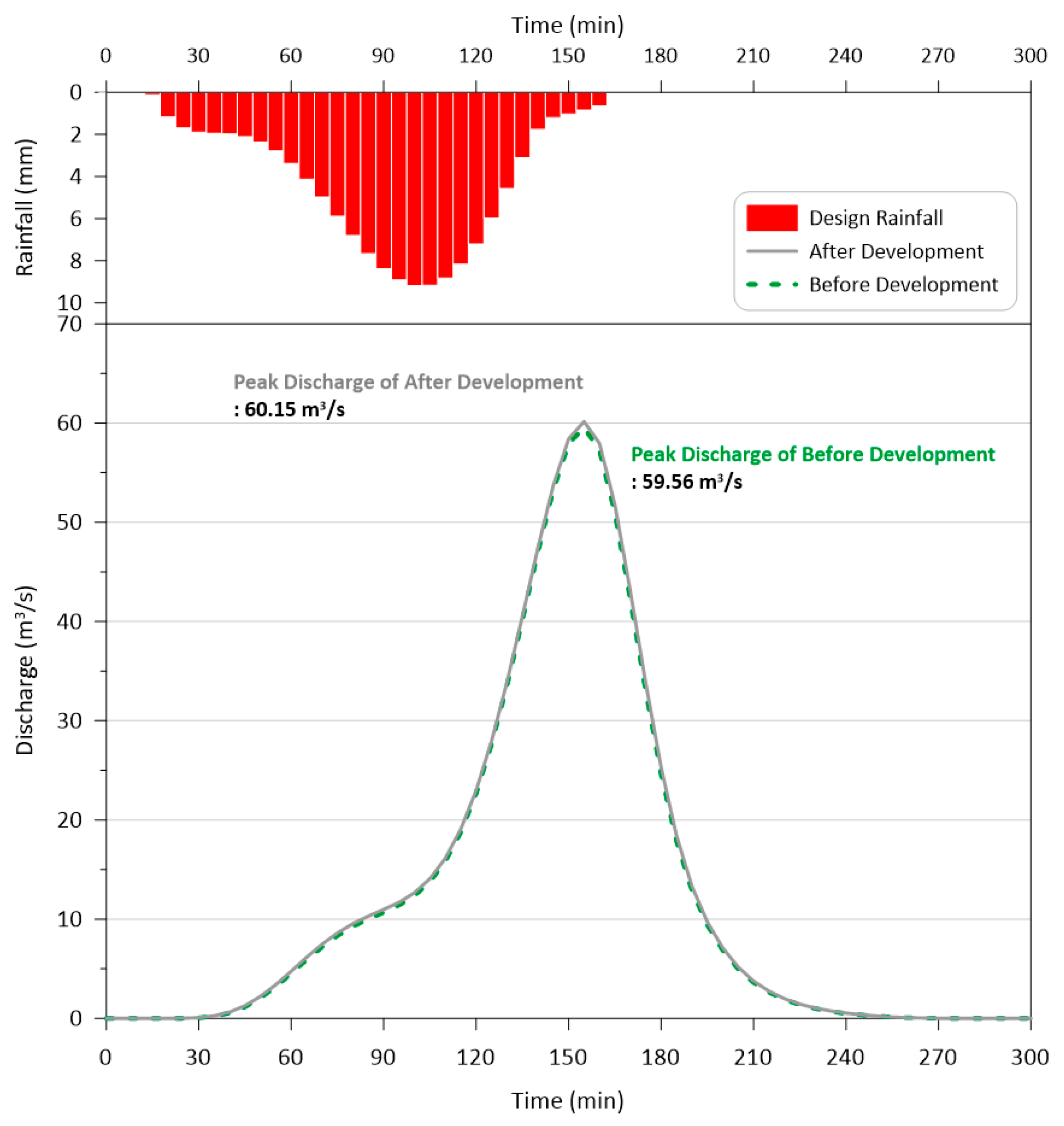
4.1. Discharge Calculation before and after Development
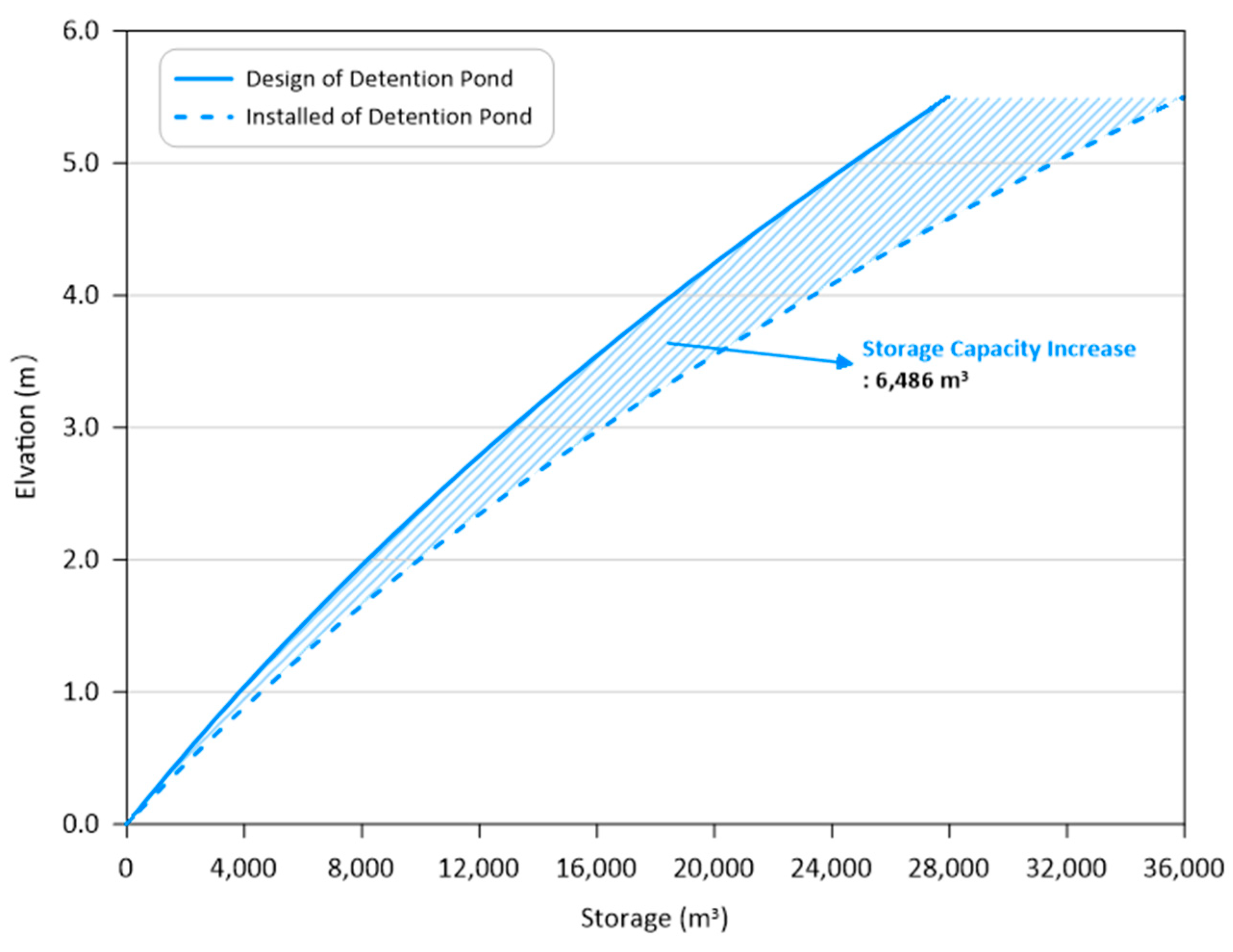
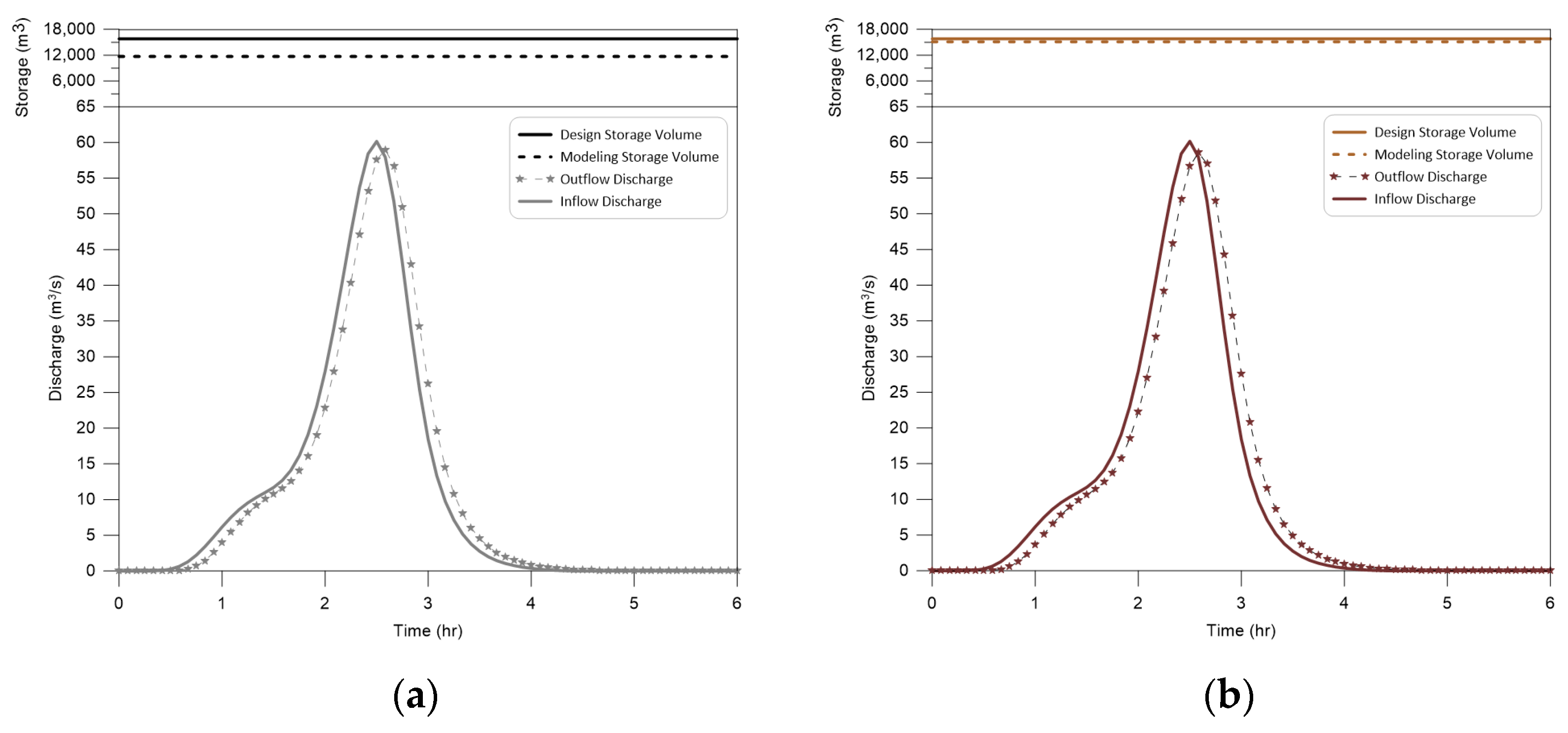
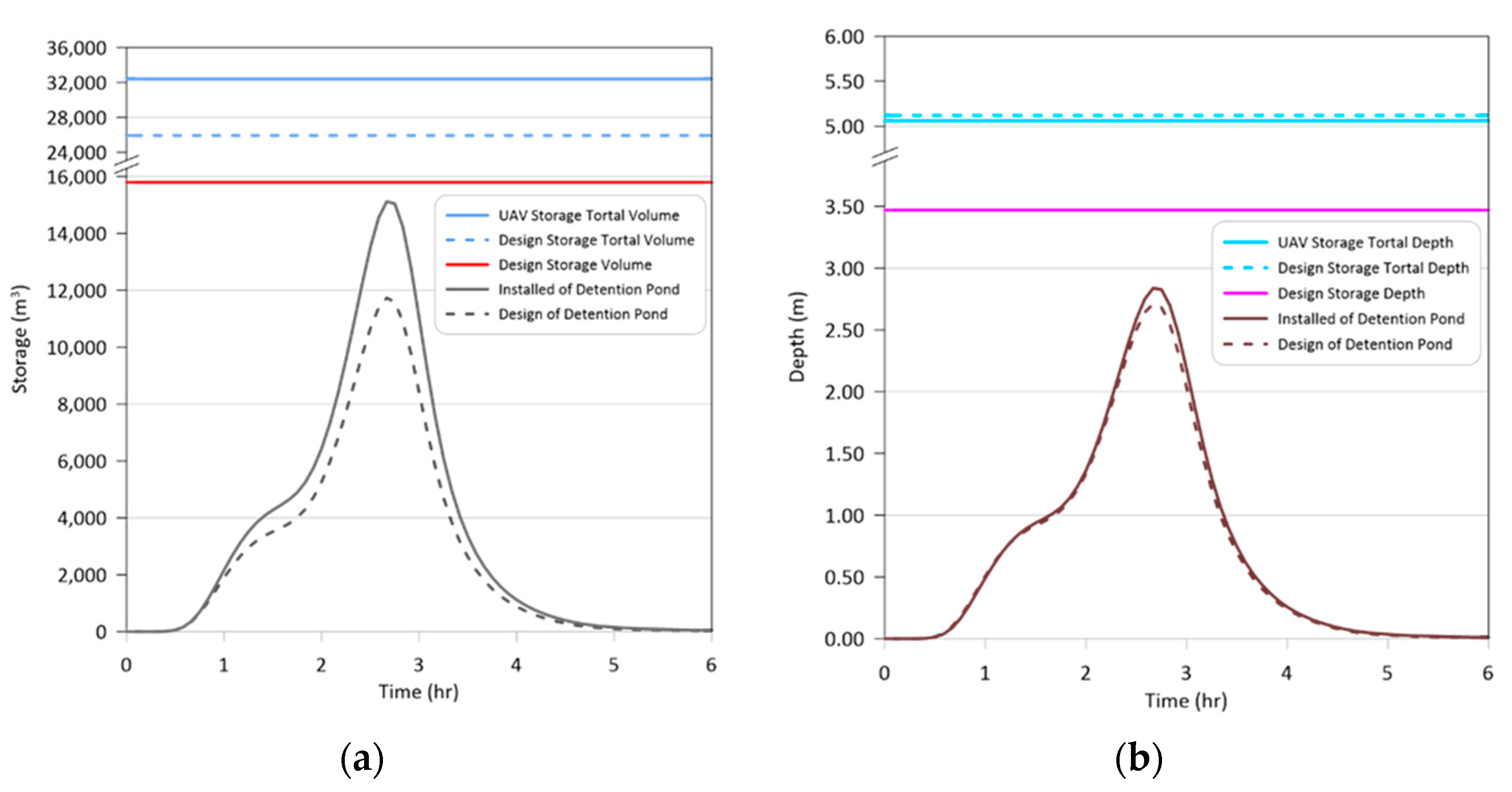
4.2. Reduction Effect Analysis on Detention Pond Using Design Drawing and Topography Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yaghmaei, N. Human Cost of Disasters: An Overview of the Last 20 Years, 2000–2019; UN Office for Disaster Risk Reduction: Geneva, Switzerland, 2020. [Google Scholar]
- IPCC. Climate Change 2014: Impacts, Adaptation, and Vulnerability. Part A: Global and Sectoral Aspects; Contribution of Working Group II to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2014. [Google Scholar]
- Tamminga, A.D.; Eaton, B.C.; Hugenholtz, C.H. UAS-based remote sensing of fluvial change following an extreme flood event. Earth Surf. Process. Landf. 2015, 40, 1464–1476. [Google Scholar] [CrossRef]
- Hemmelder, S.; Marra, W.; Markies, H.; De Jong, S.M. Monitoring river morphology & bank erosion using UAV imagery—A case study of the river Buëch, Hautes-Alpes, France. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 428–437. [Google Scholar] [CrossRef]
- Cao, B.; Guan, W.; Li, K.; Pan, B.; Sun, X. High-Resolution Monitoring of Glacier Mass Balance and Dynamics with Unmanned Aerial Vehicles on the Ningchan No. 1 Glacier in the Qilian Mountains, China. Remote Sens. 2021, 13, 2735. [Google Scholar] [CrossRef]
- Chandler, B.M.P.; Lovell, H.; Boston, C.M.; Lukas, S.; Barr, I.D.; Benediktsson, Í.Ö.; Benn, D.I.; Clark, C.D.; Darvill, C.M.; Evans, D.J.A.; et al. Glacial geomorphological mapping: A review of approaches and frameworks for best practice. Earth-Sci. Rev. 2018, 185, 806–846. [Google Scholar] [CrossRef]
- Śledź, S.; Ewertowski, M.W.; Piekarczyk, J. Applications of unmanned aerial vehicle (UAV) surveys and Structure from Motion photogrammetry in glacial and periglacial geomorphology. Geomorphology 2021, 378, 107620. [Google Scholar] [CrossRef]
- Urban, R.; Štroner, M.; Blistan, P.; Kovanič, Ľ.; Patera, M.; Jacko, S.; Ďuriška, I.; Kelemen, M.; Szabo, S. The Suitability of UAS for Mass Movement Monitoring Caused by Torrential Rainfall—A Study on the Talus Cones in the Alpine Terrain in High Tatras, Slovakia. ISPRS Int. J. Geo-Inf. 2019, 8, 317. [Google Scholar] [CrossRef]
- Ansari, A. Use of point cloud with a low-cost UAV system for 3D mapping. In Proceedings of the 2012 International Conference on Emerging Trends in Electrical Engineering and Energy Management (ICETEEEM), Chennai, India, 13–15 December 2012; pp. 131–134. [Google Scholar]
- Xiong, L.-Y.; Tang, G.-A.; Li, F.-Y.; Yuan, B.-Y.; Lu, Z.-C. Modeling the evolution of loess-covered landforms in the Loess Plateau of China using a DEM of underground bedrock surface. Geomorphology 2014, 209, 18–26. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, C.; Gold, C. Digital Terrain Modeling: Principles and Methodology; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Tang, G.a.; Ge, S.; Li, F.; Zhou, J. Review of digital elevation model (DEM) based research on China Loess Plateau. J. Mt. Sci. 2005, 2, 265–270. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Bandara, K.R.M.U.; Samarakoon, L.; Shrestha, R.P.; Kamiya, Y. Automated Generation of Digital Terrain Model using Point Clouds of Digital Surface Model in Forest Area. Remote Sens. 2011, 3, 845–858. [Google Scholar] [CrossRef]
- Krauß, T.; Arefi, H.; Reinartz, P. Evaluation of selected methods for extracting digital terrain models from satellite born digital surface models in urban areas. In Proceedings of the SMPR2011 Conference, Tehran, Iran, 18–19 May 2011. [Google Scholar]
- Polat, N.; Uysal, M. Investigating performance of Airborne LiDAR data filtering algorithms for DTM generation. Measurement 2015, 63, 61–68. [Google Scholar] [CrossRef]
- Varlik, A.; Selvi, H.; Kalayci, I.; Karauğuz, G.; Öğütcü, S. Investigation of the Compatibility of Fasillar and Eflatunpinar Hittite Monuments with Close-Range Photogrammetric Technique. Mediterr. Archaeol. Archaeom. 2016, 16, 249–256. [Google Scholar]
- Boufama, B.; Mohr, R.; Veillon, F. Euclidean constraints for uncalibrated reconstruction. In Proceedings of the 1993 (4th) International Conference on Computer Vision, Berlin, Germany, 11–14 May 1993; pp. 466–470. [Google Scholar]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the 4th Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–152. [Google Scholar]
- Spetsakis, M.; Aloimonos, J.Y. A multi-frame approach to visual motion perception. Int. J. Comput. Vis. 1991, 6, 245–255. [Google Scholar] [CrossRef]
- Schwind, M.; Starek, M. Assessing 3D Point Cloud Fidelity of UAS-SfM Software Solutions over Varying Terrain. In Proceedings of the 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop, Savannah, GA, USA, 6–8 June 2017. [Google Scholar]
- Burns, J.H.R.; Delparte, D. Comparison of Commercial Structure-from-Motion Photogrammety Software Used for Underwater Three-Dimensional Modeling of Coral Reef Environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 127–131. [Google Scholar] [CrossRef]
- Zecevic, Z.; Popovic, T.; Krstajic, B. Cloud based solution for automatic image mosaicking and georeferencing. In Proceedings of the 22nd International Scientific-Professional Conference Information Technology, Zabljak, Montenegro, 27 February–4 March 2017. [Google Scholar]
- Niederheiser, R.; Mokroš, M.; Lange, J.; Petschko, H.; Prasicek, G.; Elberink, S.O. Deriving 3D Point Clouds from Terrestrial Photographs—Comparison of Different Sensors and Software. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 685–692. [Google Scholar]
- Haala, N.; Cavegn, S. High Density Aerial Image Matching: State-of-the-Art and Future Prospects. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B4, 625–630. [Google Scholar] [CrossRef]
- Bhandari, B.; Oli, U.; Pudasaini, U.; Panta, N. Generation of high resolution DSM using UAV images. In Proceedings of the FIG Working Week 2015, Sofia, Bulgaria, 17–21 May 2015; pp. 17–21. [Google Scholar]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Haala, N. The landscape of dense image matching algorithms. In Proceedings of the Photogrammetric Week 2013, Stuttgart, Germany, 9–13 September 2013; pp. 271–284. [Google Scholar]
- Ramesh, R.; Kalin, L.; Hantush, M.; Chaudhary, A. A secondary assessment of sediment trapping effectiveness by vegetated buffers. Ecol. Eng. 2021, 159, 106094. [Google Scholar] [CrossRef]
- Liu, L. Drone-based photogrammetry for riverbed characteristics extraction and flood discharge modeling in Taiwan’s mountainous rivers. Measurement 2023, 220, 113386. [Google Scholar] [CrossRef]
- Detert, M.; Johnson, E.D.; Weitbrecht, V. Proof-of-concept for low-cost and non-contact synoptic airborne river flow measurements. Int. J. Remote Sens. 2017, 38, 2780–2807. [Google Scholar] [CrossRef]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Arcangeletti, E. Assessment of drone-based surface flow observations. Hydrol. Process. 2016, 30, 1114–1130. [Google Scholar] [CrossRef]
- Perks, M.T.; Russell, A.J.; Large, A.R.G. Technical Note: Advances in flash flood monitoring using unmanned aerial vehicles (UAVs). Hydrol. Earth Syst. Sci. 2016, 20, 4005–4015. [Google Scholar] [CrossRef]
- Koutalakis, P.; Tzoraki, O.; Zaimes, G. UAVs for Hydrologic Scopes: Application of a Low-Cost UAV to Estimate Surface Water Velocity by Using Three Different Image-Based Methods. Drones 2019, 3, 14. [Google Scholar] [CrossRef]
- Thumser, P.; Haas, C.; Tuhtan, J.A.; Fuentes-Pérez, J.F.; Toming, G. RAPTOR-UAV: Real-time particle tracking in rivers using an unmanned aerial vehicle. Earth Surf. Process. Landf. 2017, 42, 2439–2446. [Google Scholar] [CrossRef]
- Hassanzadeh, Y. Hydraulics of sediment transport. In Hydrodynamics: Theory and Model; IntechOpen: Rijeka, Croatia, 2012. [Google Scholar]
- Shields, A. Application of Similarity Principles and Turbulence Research to Bed-Load Movement; Soil Conservation Service: Washington, DC, USA, 1936.
- Yang, S.; Li, C.; Lou, H.; Wang, P.; Wang, J.; Ren, X. Performance of an Unmanned Aerial Vehicle (UAV) in Calculating the Flood Peak Discharge of Ephemeral Rivers Combined with the Incipient Motion of Moving Stones in Arid Ungauged Regions. Remote Sens. 2020, 12, 1610. [Google Scholar] [CrossRef]
- Yang, S.; Wang, P.; Lou, H.; Wang, J.; Zhao, C.; Gong, T. Estimating River Discharges in Ungauged Catchments Using the Slope–Area Method and Unmanned Aerial Vehicle. Water 2019, 11, 2361. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; Moore, P.; Kilsby, C.G.; O’Donnell, G.M.; Hardy, A.J.; Berry, P.A.M. Daily discharge estimation at ungauged river sites using remote sensing. Hydrol. Process. 2014, 28, 1043–1054. [Google Scholar] [CrossRef]
- Kerr, J.M.; Purkis, S. An algorithm for optically-deriving water depth from multispectral imagery in coral reef landscapes in the absence of ground-truth data. Remote Sens. Environ. 2018, 210, 307–324. [Google Scholar] [CrossRef]
- Liu, C.; Men, B.; Song, J. Ecological Hydraulic Radius Method for Estimating Ecological Water Demand in River. Prog. Nat. Sci. 2007, 17, 42–48. [Google Scholar]
- Yang, S.; Wang, J.; Wang, P.; Gong, T.; Liu, H. Low Altitude Unmanned Aerial Vehicles (UAVs) and Satellite Remote Sensing Are Used to Calculated River Discharge Attenuation Coefficients of Ungauged Catchments in Arid Desert. Water 2019, 11, 2633. [Google Scholar] [CrossRef]
- Lagogiannis, S.; Dimitriou, E. Discharge Estimation with the Use of Unmanned Aerial Vehicles (UAVs) and Hydraulic Methods in Shallow Rivers. Water 2021, 13, 2808. [Google Scholar] [CrossRef]
- Ministry of Land, Transport and Maritime Affairs. Guidelines for Calculating Design Floods, 1st ed.; Ministry of Land, Transport and Maritime Affairs: Sejong-si, Republic of Korea, 2012; pp. 1–73. [Google Scholar]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing Accuracy and Repeatability of UAV Blocks Oriented with GNSS-Supported Aerial Triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Varbla, S.; Puust, R.; Ellmann, A. Accuracy assessment of RTK-GNSS equipped UAV conducted as-built surveys for construction site modelling. Surv. Rev. 2021, 53, 477–492. [Google Scholar] [CrossRef]
- Casella, V.; Chiabrando, F.; Franzini, M.; Manzino, A.M. Accuracy Assessment of a UAV Block by Different Software Packages, Processing Schemes and Validation Strategies. ISPRS Int. J. Geo-Inf. 2020, 9, 164. [Google Scholar] [CrossRef]
- Fischer, R.L.; Ruby, J.G.; Armstrong, A.J.; Edwards, J.D.; Spore, N.J.; Brodie, K.L. Geospatial Accuracy of Small Unmanned Airborne System Data in the Coastal Environment; Geospatial Research Laboratory: Alexandria, VA, USA; Coastal and Hydraulics Laboratory: Kitty Hawk, NC, USA, 2019. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Method | Equation | |
|---|---|---|---|
| Rainfall analysis | Rainfall data | Conversion factor of fixed duration—unfixed duration | Equation (1) |
| Probability distributions | Gumbel distribution | Equation (2) | |
| Rainfall intensity formula | Head count polynomials | Equation (3) | |
| Areal rainfall quantiles | Estimation of Thiessen method after areal reduction factor | Equation (4) | |
| Time distribution | Huff’s method of third quartile | ||
| Basin characteristics | Area | Digital map | |
| River length | Digital map (length from exit of basin to starting point of basin) | ||
| River slope | Digital map (average basin) | ||
| Shape factor | Digital map | ||
| Effective discharge | Curve number | AMC-Ⅲ (using land cover map and detailed soil map) | |
| Flood discharge | Unit hydrograph | Clark unit hydrograph method | |
| Time of concentration | Continuous Kraven formula | Equations (5)–(7) | |
| Storage coefficient | Sabol formula | Equation (8) | |
| Flood hydrograph | Flood hydrograph | Effective rainfall and base flow | |
| Flood routing | Muskingum method | Equation (9) | |
| Target Area | ||
|---|---|---|
| Before Development | After Development (Innovation City Area) | Detention Pond Area |
| 1.37 km2 | 1.37(0.17) km2 | 6685 m2 |
| Characteristics of UAV and Camera | Performance of Trimble R4s | ||
|---|---|---|---|
| Weight | 1391 g | Channel | 240 channels |
| Diagonal Length | 350 mm | Static positioning | Horizontal: 3 mm + 0.1 ppm Verticality: 3.5 mm + 0.4 ppm |
| Sensors | 1” CMOS, valid pixel: 20 M | VRS | Horizontal: 8 mm + 1 ppm Verticality: 15 mm + 1 ppm |
| Lens | FOV 84°, 8.8 mm/24 mm, f/2.8~f/11 | Input/output | ATOM, CMR, CMR+, RTCM, CMRx, NMEA |
| Flight Planning Establishment | Condition of GNSS Observation Station | ||
|---|---|---|---|
| Classification | Contents | Classification | Contents |
| Photographing area | 0.03 km2 | Observation station | Ulsan Jung gu |
| Photographing altitude | 30 m | Receiver type | Trimble alloy |
| Overlap rate | Longitudinal: 80%, transverse: 80% | Antenna type | TRM59800.00 |
| Camera angle | 90° | RTCM type | SAMC-RTCM31 |
| Number of photographs | 660 | Coordination | Latitude: 35-33-56.5, longitude: 129-19-1.38, ellipsoid Height: 100.63 |
| Image coordinate | WGS84 | Address | 365, Jongga-ro, Jung-gu, Ulsan, Korea |
| Condition | Error X (m) | Error Y (m) | Error Z (m) |
|---|---|---|---|
| Mean (m) | 0.000071 | −0.000105 | 0.000255 |
| Sigma (m) | 0.003546 | 0.003800 | 0.005353 |
| RMS error (m) | 0.003547 | 0.003801 | 0.005359 |
| Classification | Contents |
|---|---|
| Average ground sampling distance (GSD) | 1 × GSD (1.20 [cm/pixel]) |
| Area covered | 0.032 km2 |
| Images | Median of 43,726 key points per image |
| Dataset | 660 out of 660 images calibrated (100%), all images enabled |
| Camera optimization | 1.25% relative difference between initial and optimized internal camera parameters |
| Matching | Median of 7570.94 matches per calibrated image |
| RMSE | 0.004 m |
| Classification | Specifications of Detention Pond | ||
|---|---|---|---|
| Design Drawing | Topography Analysis | ||
| Floor height (EL.m) | 18.03 | 17.91 | |
| Discharge control | Depth (m) | 3.47 | 2.94 |
| Top height (EL.m) | 21.5 | 20.85 | |
| Volume (m3) | 15,795 | 15,795 | |
| Freeboard (m) | 1.65 | 2.12 | |
| Wave part | Wave height (EL.m) | 23.15 | 22.97 |
| Total depth (m) | 5.12 | 5.06 | |
| Total volume (m3) | 25,916 | 32,402 | |
| Total area (m2) | 6685 | 8795 | |
| Main spillway | B (m) × H (m) × count | 3.5 × 3.5@2 | 3.5 × 3.5@2 |
| Entrance elevation (El.m) | 18.03 | 17.91 | |
| Parameter | Before Development | After Development | |
|---|---|---|---|
| Area (km2) | 1.37 | 1.37 | |
| Curve number | 83.15 | 83.93 | |
| River length (km) | 2.5 | 2.59 | |
| Average slope (%) | 0.072 | 0.07 | |
| Clark | Time of concentration (h) | 0.87 | 0.87 |
| Storage constant (h) | 0.72 | 0.74 | |
| Design frequency (yr) | 50 | 50 | |
| Critical duration (min) | 155 | 155 | |
| Design rainfall (mm) | 128 | 128 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Park, M.; Joo, J. Adequacy Analysis Using UAV of Heavy Rainfall Disaster Reduction Facilities According to Urban Development in Republic of Korea. Remote Sens. 2023, 15, 5518. https://doi.org/10.3390/rs15235518
Song Y, Park M, Joo J. Adequacy Analysis Using UAV of Heavy Rainfall Disaster Reduction Facilities According to Urban Development in Republic of Korea. Remote Sensing. 2023; 15(23):5518. https://doi.org/10.3390/rs15235518
Chicago/Turabian StyleSong, Youngseok, Moojong Park, and Jingul Joo. 2023. "Adequacy Analysis Using UAV of Heavy Rainfall Disaster Reduction Facilities According to Urban Development in Republic of Korea" Remote Sensing 15, no. 23: 5518. https://doi.org/10.3390/rs15235518