

Research on the Real-Time Ambiguity Resolution Algorithm of GPS/Galileo/BDS Based on CNES Real-Time Products

Abstract
:1. Introduction
2. Materials and Methods
2.1. PPP Zero-Difference Observation Equation
2.2. Ionospheric-Free Combination with Ambiguity Fixing
3. Experimental Results and Analysis
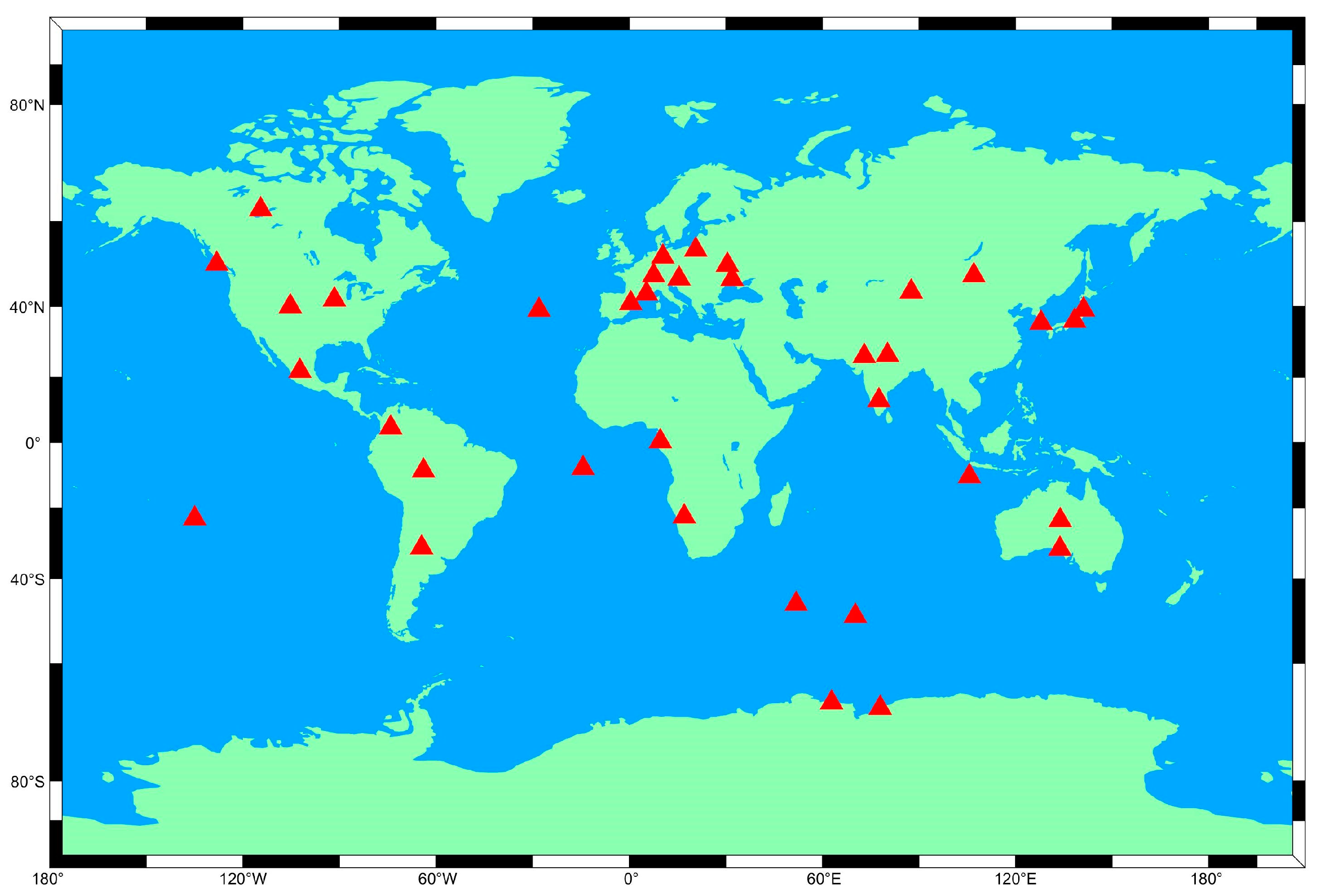
3.1. Experimental Data and Processing Scheme
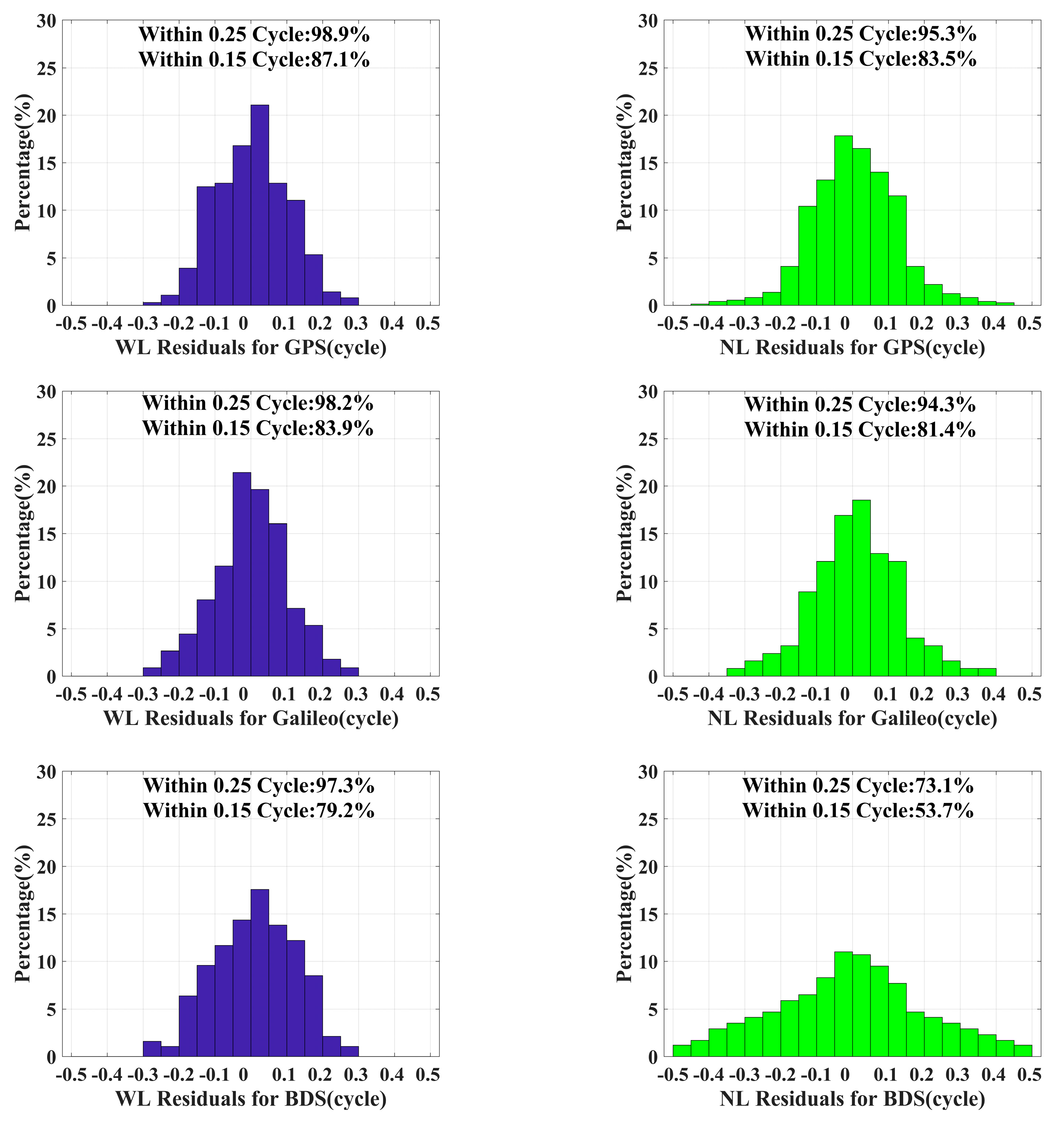
3.2. Ambiguity Resolution Residuals Analysis
3.3. Convergence Performance Analysis
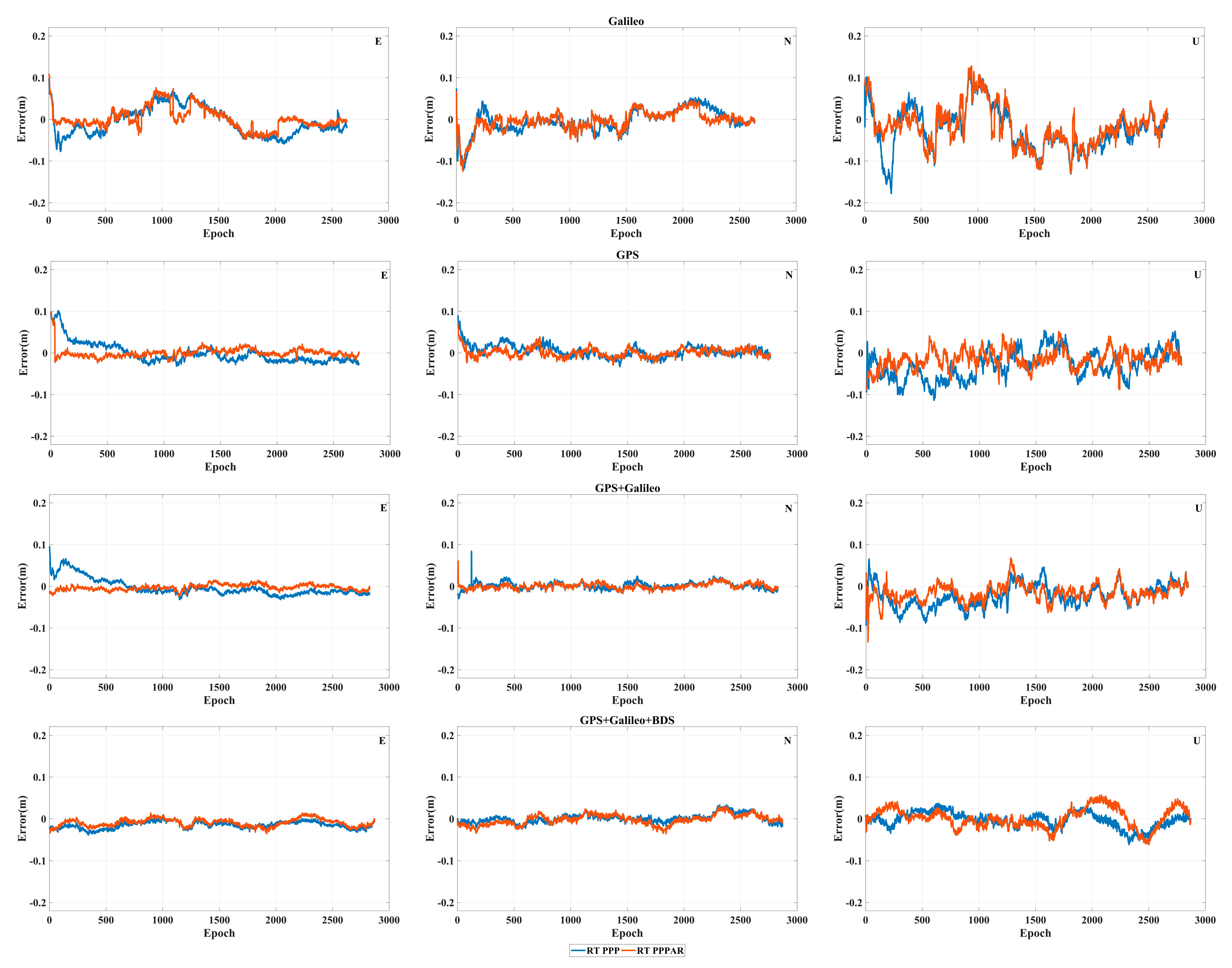
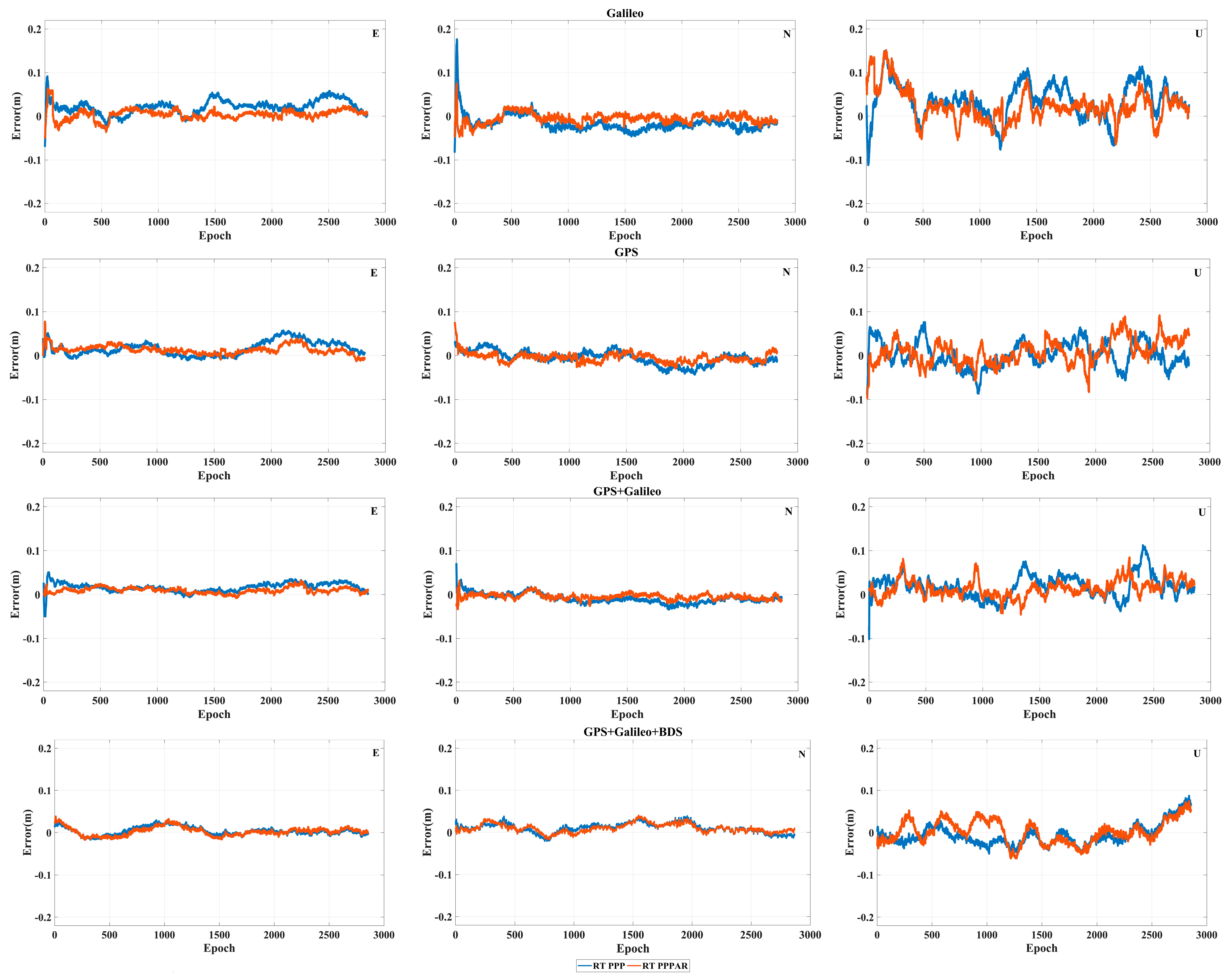
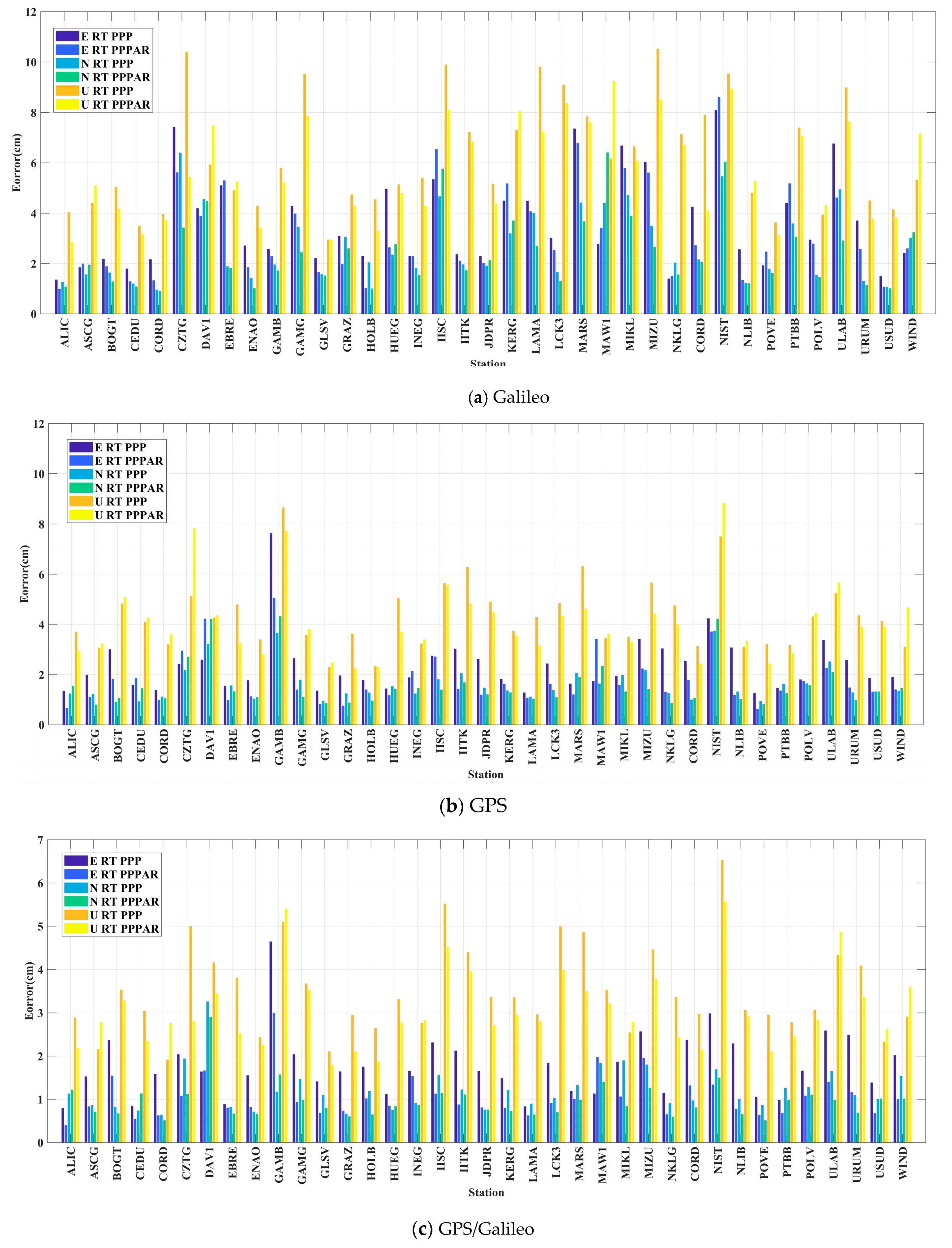
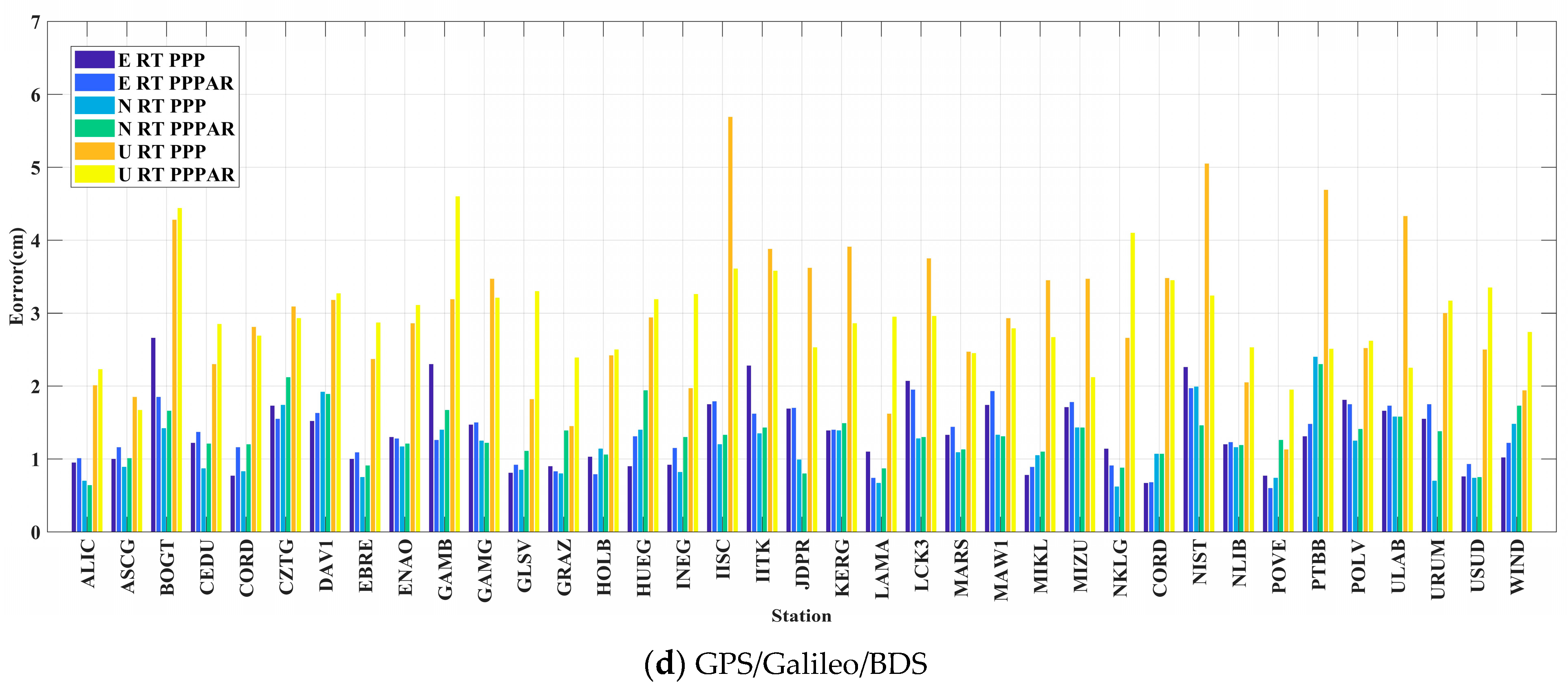
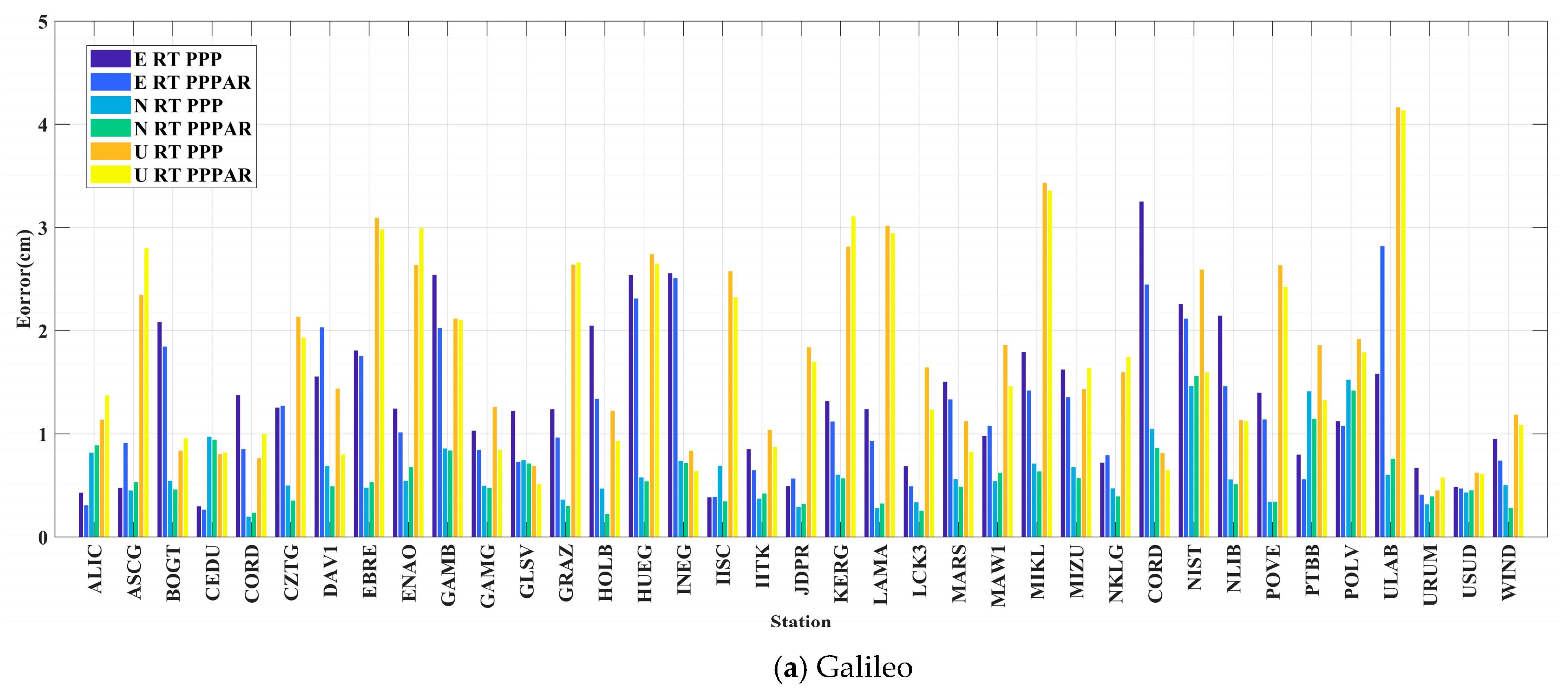
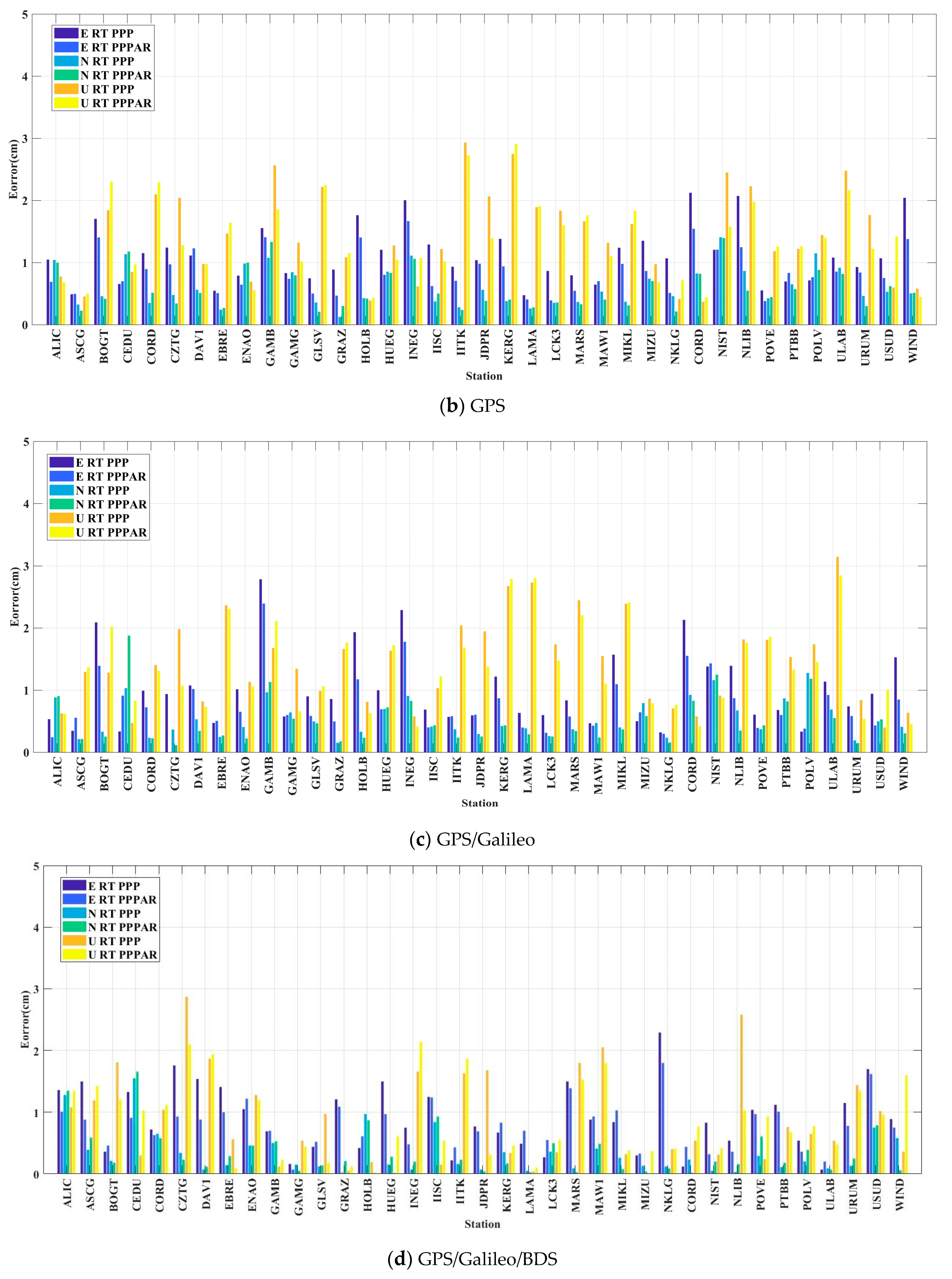
3.4. Positioning Accuracy Analysis
4. Conclusions
- (1)
- The RT phase biases products were analyzed. GPS has the best ambiguity fixing, followed by BDS and Galileo. Within a range of ±0.25 cycles, the GPS WL and NL residuals were 98.9% and 95.3%, respectively, while they were 87.1% and 83.5%, respectively, within a range of ±0.15 cycles. For the Galileo system, the WL residuals within ±0.25 cycles and ±0.15 cycles were 98.2% and 83.9%, while the residuals within ±0.15 cycles for NL were 81.4%; in addition, the corresponding value for within ±0.25 cycles is 94.3%. The distribution of the WL and NL residuals of BDS is poor. Within ±0.25 and ±0.15 cycles, the residuals of WL and NL were 97.3% and 79.2%, respectively, whereas the residuals of NL were only 73.1% and 53.7%.
- (2)
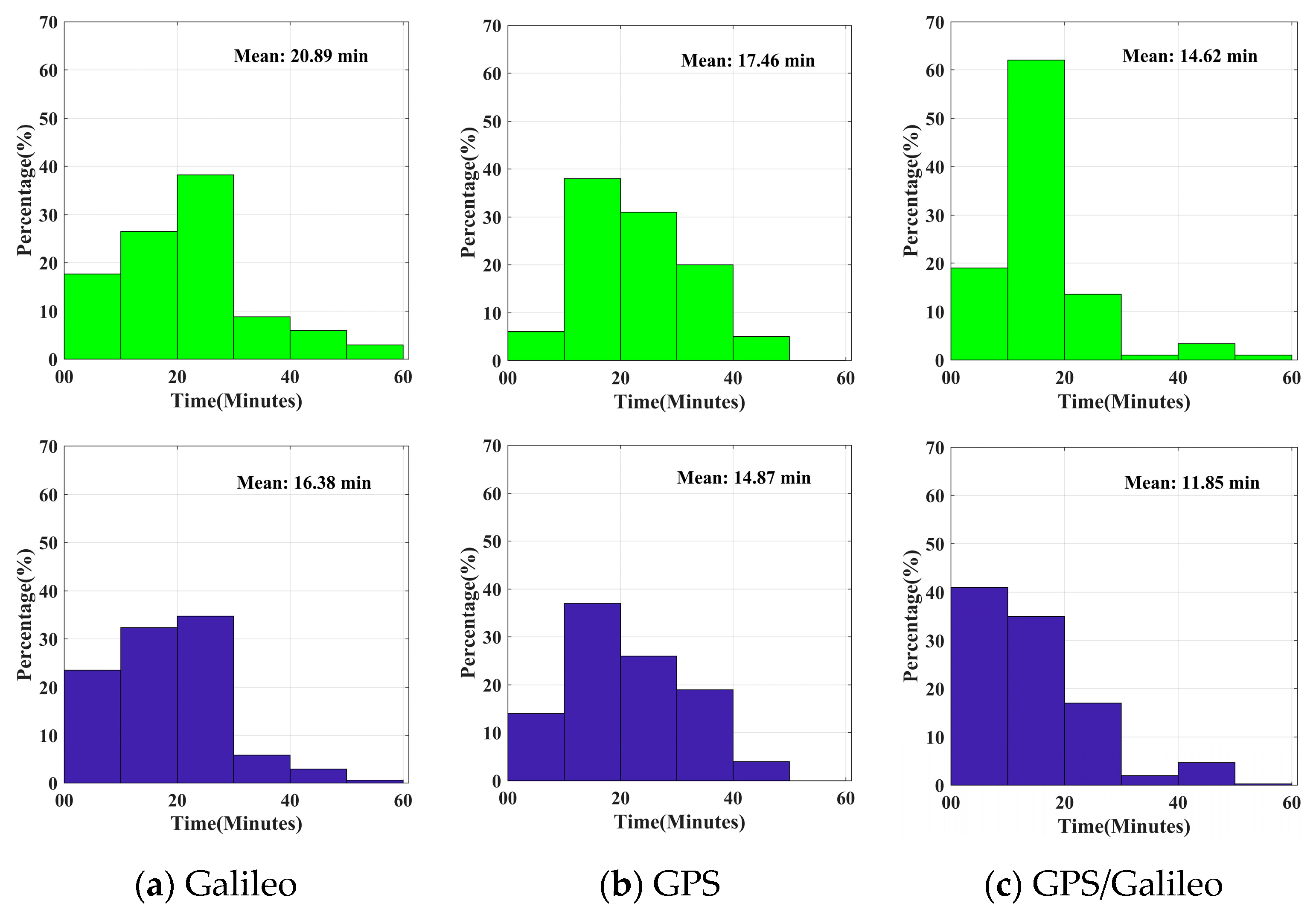
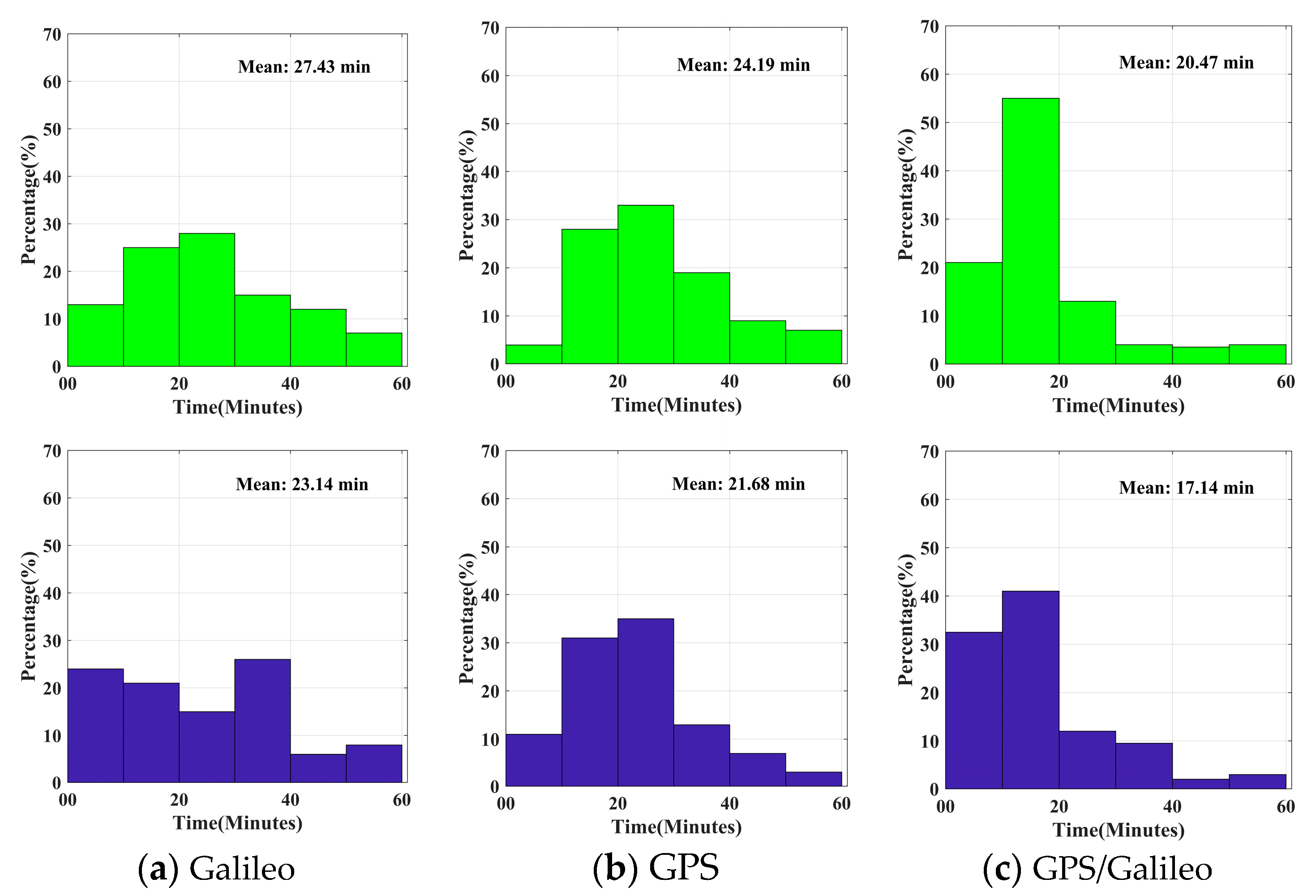
- PPPAR was effective in reducing convergence time. After applying AR processing, the GPS convergence time in static mode decreased from 17.46 min to 14.87 min, while it decreased from 20.89 min to 16.38 min for Galileo. At the same time, the GPS/Galileo decreased from 14.62 min to 11.85 min. In kinematic mode, the GPS decreased from 24.19 min to 21.68 min, while the average convergence of Galileo time decreased from 27.43 min to 23.14 min. After applying AR processing, the convergence time of the combined GPS/Galileo decreased from 20.47 min to 17.14 min, indicating a significant increase in the convergence speed.
- (3)
- After PPPAR processing, the improvement in the positioning accuracy in dynamic mode was more obvious than that in static mode. Meanwhile, the positioning effect of the Galileo system was the worst, reaching 6.2 cm in the U direction of dynamic RT PPP. The positioning effect of GPS was obviously better than Galileo, and the positioning accuracy of the multi-system combination was also better. Although the RT PPPAR results of individual stations are not as good as RT PPP after adding the BDS system, which is caused by the unsatisfactory solving effect of the BDS system, the positioning accuracy of the multi-system was still very good. Therefore, we should choose a combination of multiple systems for positioning in our daily real-time applications.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Li, P. Review of GNSS PPP and its application. Acta Geod. Cartogr. Sin. 2017, 46, 1399–1407. [Google Scholar]
- Geng, J.; Pan, Y.; Li, X.; Guo, J.; Liu, J.; Chen, X.; Zhang, Y. Noise Characteristics of High-Rate Multi-GNSS for Subdaily Crustal Deformation Monitoring. J. Geophys. Res. Solid Earth 2018, 123, 1987–2002. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Ge, Y. Rapid displacement determination with a stand-alone multi-GNSS receiver: GPS, Beidou, GLONASS, and Galileo. GPS Solut. 2023, 23, 54. [Google Scholar] [CrossRef]
- Muellerschoe, R.J.; Barsever, Y.E.; Bertiger, W.I.; Stowers, D.A. Decimeter accuracy, NASA’s global DGPS for high precision users. GPS World 2000, 12, 14–20. [Google Scholar]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Gu, S.; Guo, R.; Gong, X.; Zhang, S.; Lou, Y.; Li, Z. Real-time precise point positioning based on BDS-3 global short message communication. GPS Solut. 2022, 26, 107. [Google Scholar] [CrossRef]
- Laurichesse, D.; Cerri, L.; Berthias, J.P.; Mercier, F. Real time precise GPS constellation and clocks estimation by means of a Kalman Filter. In Proceedings of the 26th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2013), Nashville, TN, USA, 16–20 September 2013; pp. 1155–1163. [Google Scholar]
- Li, X.; Chen, X.; Ge, M.; Schuh, H. Improving multi-GNSS ultra-rapid orbit determination for real-time precise point positioning. J. Geod. 2019, 93, 45–64. [Google Scholar] [CrossRef]
- Fu, W.; Huang, G.; Zhang, Q.; Gu, S.; Schuh, H. Multi-GNSS real-time clock estimation using sequential least square adjustment with online quality control. J. Geod. 2019, 93, 963–976. [Google Scholar] [CrossRef]
- Yao, Y.; He, Y.; Yi, W.; Song, W.; Cao, C.; Chen, M. Method for evaluating real-time GNSS satellite clock offset products. GPS Solut. 2017, 21, 1417–1425. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, H.; Gao, Y.; Yao, Y.; Xu, C. Evaluation and analysis of real-time precise orbits and clocks products from different IGS analysis centers. Adv. Space Res. 2018, 61, 2942–2954. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Li, M. Real-Time Precise Point Positioning (RTPPP) with raw observations and its application in real-time regional ionospheric VTEC modeling. J. Geod. 2018, 92, 1267–1283. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Ge, M.; Neitzel, F.; Wang, X.; Yuan, H. Investigation of the performance of real-time BDS-only precise point positioning using the IGS real-time service. GPS Solut. 2019, 23, 66. [Google Scholar] [CrossRef]
- Ji, R.; Jiang, X.; Chen, X.; Zhu, H.; Ge, M.; Neitzel, F. Quality monitoring of real-time GNSS precise positioning service system. Geo Spat. Inf. Sci. 2023, 26, 1–15. [Google Scholar] [CrossRef]
- De Bakker, P.F.; Tiberius, C.C.J.M. Real-time multi-GNSS single frequency precise point positioning. GPS Solut. 2017, 21, 1791–1803. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Z.; Wang, L.; Wang, X.; Yuan, H. Assessment of multiple GNSS real-time SSR products from different analysis centers. ISPRS Int. J. Geo Inf. 2018, 7, 85. [Google Scholar] [CrossRef]
- Abdi, N.; Ardalan, A.A.; Karimi, R.; Rezvani, M.H. Performance assessment of multi-GNSS real-time PPP over Iran. Adv. Space Res. 2017, 59, 2870–2879. [Google Scholar] [CrossRef]
- Liu, T.; Wang, J.; Yu, H.; Cao, X.; Ge, Y. A new weighting approach with application to ionospheric delay constraint for GPS/GALILEO real-time precise point positioning. Appl. Sci. 2018, 8, 2537. [Google Scholar] [CrossRef]
- Ren, Z.; Gong, H.; Peng, J.; Tang, C.; Huang, X.; Sun, G. Performance Assessment of Real-time Precise Point Positioning Using BDS PPP-B2b Service Signal. Adv. Space Res. 2021, 68, 3242–3254. [Google Scholar] [CrossRef]
- Kazmierski, K.; Hadas, T.; Sos’nica, K. Weighting of multi-GNSS observations in real-time precise point positioning. Remote Sens. 2018, 10, 84. [Google Scholar] [CrossRef]
- Kazmierski, K.; Sos’nica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2018, 22, 11. [Google Scholar] [CrossRef]
- Pan, L.; Gao, X.; Hu, J.; Ma, F.; Wu, W. Performance assessment of real-time Multi-GNSS integrated PPP with uncombined and ionospheric-free combined observables. Adv. Space Res. 2021, 67, 234–252. [Google Scholar] [CrossRef]
- Gabor, M.J. GPS Carrier Phase Ambiguity Resolution Using Satellite-Satellite Single-Differences; The University of Texas: Austin, TX, USA, 1999. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Collins, P.; Bisnath, S.; Lahaye, F.; Heroux, P. Undifferenced GPS Ambiguity Resolution using the Decoupled Clock Model and Ambiguity Datum Fixing. Navigation 2010, 57, 123–135. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.P.; Broca, P.; Cerri, L. Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.H.; Teferle, F.N. Integer ambiguity resolution in precise point positioning: Method comparison. J. Geod. 2010, 84, 569–581. [Google Scholar] [CrossRef]
- Shi, J.; Gao, Y. A comparison of three PPP integer ambiguity resolution methods. GPS Solut. 2014, 18, 519–528. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Wang, J.; Huang, G.; Yang, Y.; Zhang, Q.; Xiao, G. FCB estimation with three different PPP models: Equivalence analysis and experiment tests. GPS Solut. 2019, 23, 93. [Google Scholar] [CrossRef]
- Geng, J.; Teferle, F.N.; Shi, C.; Meng, X.; Dodson, A.H.; Liu, J. Ambiguity resolution in precise point positioning with hourly data. GPS Solut. 2009, 13, 263–270. [Google Scholar] [CrossRef]
- Zhang, X.; Li, P.; Zuo, X. Kinematic Precise Orbit Determination Based on Ambiguity-Fixed PPP. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 1009–1013. [Google Scholar]
- Zhang, X.; Li, X. A New Method for Zero-Differenced Interger Ambiguity Resolution and Its Application to PPP. Geomat. Inf. Sci. Wuhan Univ. 2010, 35, 657–660. [Google Scholar]
- Li, X.; Zhang, X.; Li, P. PPP for rapid precise positioning and orbit determination with zero-difference integer ambiguity fixing. Chin. J. Geophys. 2012, 55, 833–840. [Google Scholar]
- Loyer, S.; Perosanz, F.; Mercier, F.; Capdeville, H.; Marty, J. Zero-difference GPS ambiguity resolution at CNES-CLS IGS Analysis Center. J. Geod. 2012, 86, 991–1003. [Google Scholar] [CrossRef]
- Liu, S.; Sun, F.; Hao, W.; Liu, J.; Li, H. Modeling and Effects Analysis of PPP Ambiguity Fixing Based on Integer Phase Clock Method. Acta Geod. Cartogr. Sin. 2014, 12, 1230–1237. [Google Scholar]
- Liu, T.; Jiang, W.; Laurichesse, D.; Chen, H.; Liu, X.; Wang, J. Assessing GPS/Galileo real-time precise point positioning with ambiguity resolution based on phase biases from CNES. Adv. Space Res. 2020, 66, 810–825. [Google Scholar] [CrossRef]
- Gazzino, C.; Blot, A.; Bernadotte, E.; Jayle, T.; Laymand, M.; Lelarge, N.; Lacabanne, A.; Laurichesse, D. The CNES Solutions for Improving the Positioning Accuracy with Post-Processed Phase Biases, a Snapshot Mode, and High-Frequency Doppler Measurements Embedded in Recent Advances of the PPP-WIZARD Demonstrator. Remote Sens. 2023, 15, 4231. [Google Scholar] [CrossRef]
- Du, S.; Shu, B.; Xie, W.; Huang, G.; Ge, Y.; Li, P. Evaluation of Real-time Precise Point Positioning with Ambiguity Resolution Based on Multi-GNSS OSB Products from CNES. Remote Sens. 2022, 14, 4970. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, S.; Song, W.; Lou, Y.; Chen, D. Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut. 2017, 21, 333–343. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Yuan, Y.; Zhang, K.; Zhang, X.; Wickert, J. Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo. J. Geod. 2018, 92, 579–608. [Google Scholar] [CrossRef]
- Nadarajah, N.; Khodabandeh, A.; Wang, K.; Choudhury, M.; Teunissen, P.J.G. Multi-GNSS PPP-RTK: From Large- to Small-Scale Networks. Sensors 2018, 18, 1078. [Google Scholar] [CrossRef]
- Geng, J.; Wen, Q.; Zhang, Q.; Li, G.; Zhang, K. GNSS observable-specific phase biases for all-frequency PPP ambiguity resolution. J. Geod. 2022, 96, 11. [Google Scholar] [CrossRef]
- Li, B.; Mi, J.; Zhu, H.; Gu, S.; Xu, Y.; Wang, H.; Yang, L.; Chen, Y.; Pang, Y. BDS-3/GPS/Galileo OSB Estimation and PPP-AR Positioning Analysis of Different Positioning Models. Remote Sens. 2022, 14, 4207. [Google Scholar] [CrossRef]
- Blewitt, G. Carrier phase ambiguity resolution for the Global Positioning System applied to geodetic baselines up to 2000 km. J. Geophys. Res. Solid Earth 1989, 94, 10187–10203. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, Y.; Wang, J.; Yang, S.; Dong, D.; Wang, J.; Qu, W.; Wu, B. A simplified and unified model of mufti-GNSS precise point positioning. Adv. Space Res. 2015, 55, 125–134. [Google Scholar] [CrossRef]
- Dach, R.; Hugentobler, U.; Fridez, P.; Meindl, M. Bernese GPS Software Version 5.0.; Astronomical Institute, University of Bern: Bern, Switzerland, 2007; Volume 640, p. 114. [Google Scholar]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985. [Google Scholar]
- Wübbena, G. Software developments for geodetic positioning with GPS using TI 4100 code and carrier measurements. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985. [Google Scholar]
- Dong, D.; Bock, Y. Global Positioning System Network Analysis with Phase Ambiguity Resolution Applied to Crustal Deformation Studies in California. J. Geophys. Res. Solid Earth 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Gao, M.; Cao, Z.; Meng, Z.; Tan, C.; Zhu, H.; Huang, L. Algorithms Research and Precision Comparison of Different Frequency Combinations of BDS-3\GPS\Galileo for Precise Point Positioning in Asia-Pacific Region. Sensors 2023, 23, 5935. [Google Scholar] [CrossRef]
- Blewitt, G. An Automatic Editing Algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, F.; Li, P.; Zuo, X. Real-time Quality Control Procedure for GNSS Precise Point Positioning. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 940–944,1013. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Latitude | Longitude | Station | Latitude | Longitude |
|---|---|---|---|---|---|
| ALIC | −23.67 | 133.886 | KERG | −49.351 | 70.256 |
| ASCG | −7.916 | −14.333 | LAMA | 53.892 | 20.67 |
| BOGT | 4.64 | −74.081 | LCK3 | 53.892 | 20.67 |
| CEDU | −31.867 | 133.81 | MARS | 43.279 | 5.354 |
| CORD | −31.528 | −64.47 | MAW1 | −67.605 | 62.871 |
| CZTG | −46.432 | 51.855 | MIKL | 46.973 | 31.973 |
| DAV1 | −68.577 | 77.973 | MIZU | 39.135 | 141.133 |
| EBRE | 40.821 | 0.492 | NKLG | 0.354 | 9.672 |
| ENAO | 39.091 | −28.026 | NIST | 39.995 | −105.263 |
| GAMB | −23.13 | −134.965 | NLIB | 41.772 | −91.575 |
| GAMG | 35.59 | 127.92 | POVE | −8.709 | −63.896 |
| GLSV | 50.364 | 30.497 | PTBB | 52.296 | 10.46 |
| GRAZ | 47.067 | 15.493 | ULAB | 47.865 | 107.052 |
| HOLB | 50.64 | −128.135 | URUM | 43.808 | 87.601 |
| HUEG | 47.834 | 7.596 | USUD | 36.133 | 138.362 |
| INEG | 21.856 | −102.284 | WIND | −22.575 | 17.089 |
| IISC | 13.021 | 77.57 | XMIS | −10.45 | 105.689 |
| IITK | 26.521 | 80.232 | YEL2 | 62.481 | −114.481 |
| JDPR | 26.207 | 73.024 |
| Item | Setting |
|---|---|
| Observations | Pseudo-range and phase observations |
| Solution model | Static/Kinematic |
| Frequency | GPS: L1/L2; Galileo: E1/E5a; BDS: B1I/B3I |
| Orbits and clocks | CNES RT orbit and clock products |
| Elevation cut off | 7° |
| Sampling offset | 30 s |
| Phase windup | Phase polarization effects applied |
| Parameter estimation method | Kalman filtering |
| Inter-system bias | Estimated as a random walk |
| Receiver coordinates | Parameters estimation |
| Receiver clock error | Parameters estimation |
| Earth tides | IERS2010 |
| Weighting scheme | Elevation dependent weight |
| Ionosphere | Ionosphere-free |
| A priori troposphere delay | Saastamoinen |
| Tropospheric mapping function | VMF1 |
| Satellite phase center | igs20.atx |
| Phase ambiguity | WL + NL |
| Cycle slip method | GF + MW |
| System | Kinematic | Static | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RT PPPAR | RT PPP | RT PPPAR | RT PPP | |||||||||
| E | N | U | E | N | U | E | N | U | E | N | U | |
| Galileo | 3.23 | 2.43 | 5.67 | 3.66 | 2.69 | 6.26 | 1.20 | 0.58 | 1.69 | 1.35 | 0.63 | 1.80 |
| GPS | 1.75 | 1.56 | 4.09 | 2.33 | 1.63 | 4.32 | 0.86 | 0.58 | 1.37 | 1.12 | 0.62 | 1.45 |
| GPS/Galileo | 1.05 | 0.95 | 3.08 | 1.77 | 1.22 | 3.51 | 0.75 | 0.50 | 1.17 | 1.00 | 0.54 | 1.32 |
| GPS/Galileo/BDS | 1.33 | 1.32 | 2.94 | 1.36 | 1.17 | 2.98 | 0.79 | 0.35 | 0.88 | 0.91 | 0.33 | 0.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Meng, Z.; Zhu, H.; Xu, A.; Cao, Z.; Tan, C. Research on the Real-Time Ambiguity Resolution Algorithm of GPS/Galileo/BDS Based on CNES Real-Time Products. Remote Sens. 2023, 15, 5159. https://doi.org/10.3390/rs15215159
Gao M, Meng Z, Zhu H, Xu A, Cao Z, Tan C. Research on the Real-Time Ambiguity Resolution Algorithm of GPS/Galileo/BDS Based on CNES Real-Time Products. Remote Sensing. 2023; 15(21):5159. https://doi.org/10.3390/rs15215159
Chicago/Turabian StyleGao, Meng, Ziheng Meng, Huizhong Zhu, Aigong Xu, Zhihua Cao, and Chunbo Tan. 2023. "Research on the Real-Time Ambiguity Resolution Algorithm of GPS/Galileo/BDS Based on CNES Real-Time Products" Remote Sensing 15, no. 21: 5159. https://doi.org/10.3390/rs15215159