
Scatterer-Level Time-Frequency-Frequency Rate Representation for Micro-Motion Identification


Abstract
:
1. Introduction
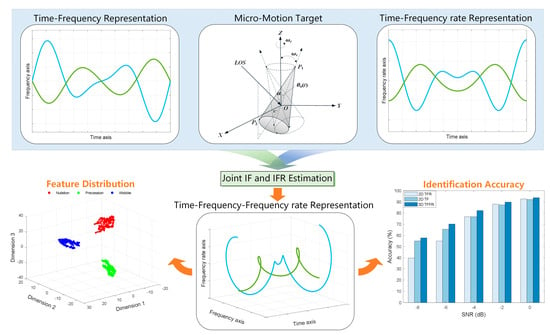
- We explore the modulation laws induced by typical micro-motion dynamics, wherein the spatial trajectories of scatterers undergoing precession, wobble, and nutation are represented as the elliptical helix curve, epicycloidal helix curve, and generalized epicycloidal helix curve in the TFFR space. These representations effectively capture the intrinsic physical patterns associated with various micro-motion dynamics.
- This article systematically investigates the separability of the components within the TFFR space for the first time. Our findings reveal that the probability of intersection among the different components decreases in the TFFR domain. Consequently, these components manifest as separated and non-overlapping spatial trajectories, enhancing the ease of component extraction and association.
- We propose a novel identification method based on scatterer-level TFFR representation that can effectively discriminate micro-motion types for different targets with access to the intrinsic physical characteristics of micro-motions. Comprehensive experiments demonstrate the efficacy and robustness of our proposal.
2. Related Work
2.1. Separation-Based Methods
2.2. Representation-Based Methods
3. TFFR Modulations Induced by Micro-Motion Dynamics
3.1. Radar Signal Model
3.2. TFFR Modulation Model
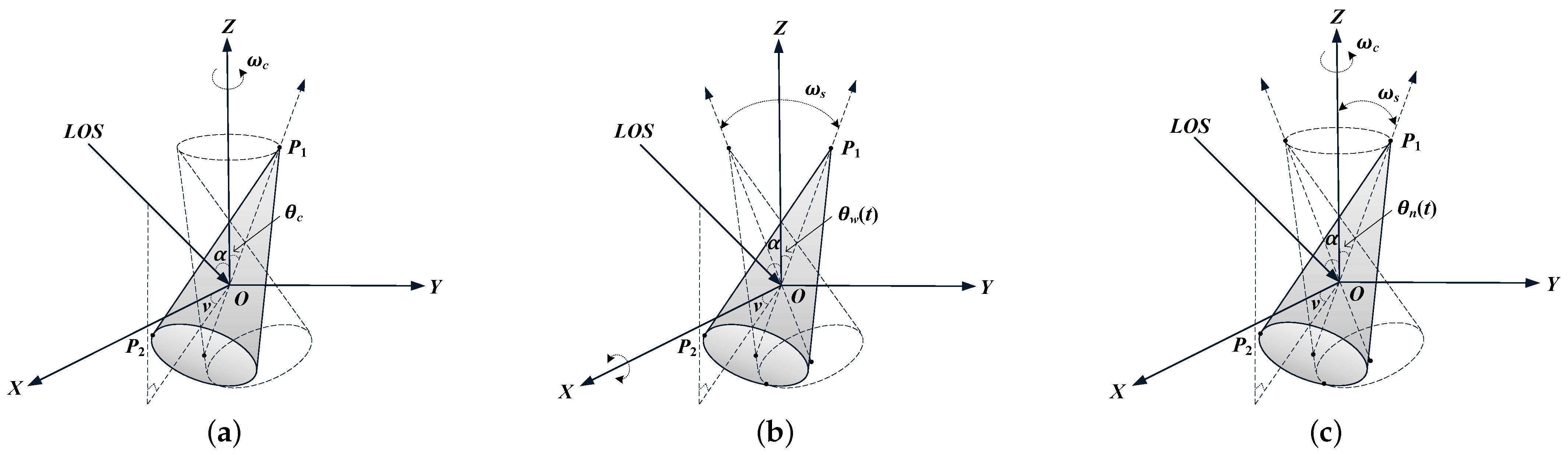
3.2.1. Precession-Induced TFFR Modulation
3.2.2. Wobble-Induced TFFR Modulation
3.2.3. Nutation-Induced TFFR Modulation
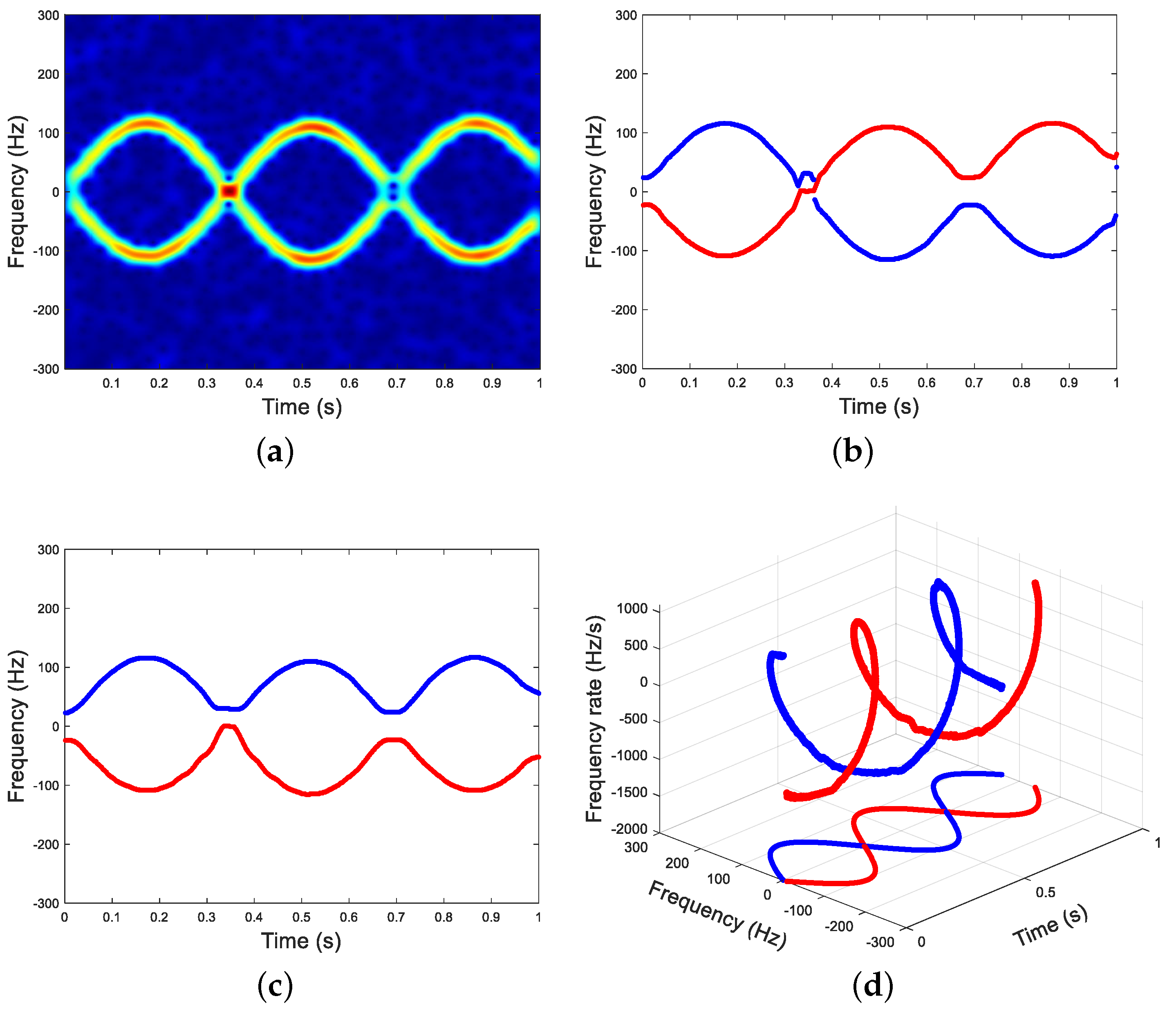
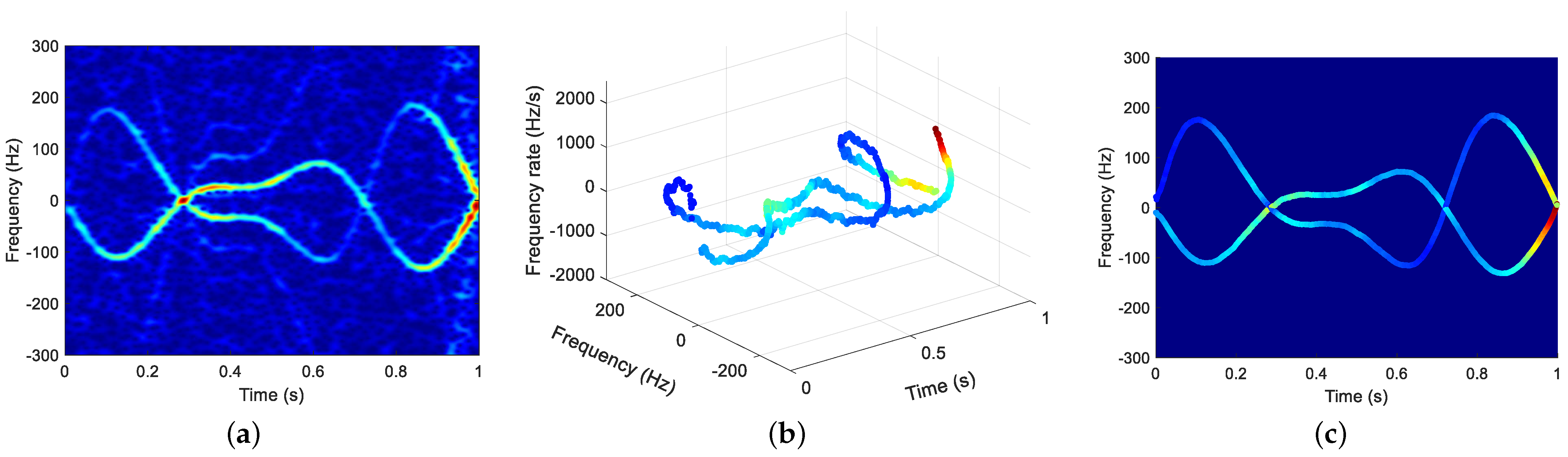
3.3. Simulation Verification for TFFR Modulation
3.3.1. TFFR Modulation Laws
3.3.2. Approximation Error Analysis
4. TFFR Modulation Properties of Micro-Motion Signals
4.1. Spatial Separability of TFFR Modulation
4.2. Signature Separability of TFFR Modulation
5. Micro-Motion Identification by TFFR Modulation
5.1. TFFR Sequence Templates Construction
- (1)
- Set different micro-motion forms and ranges of motion parameters based on the modulation models in Section 3 as follows:where , i.e., m includes precession, wobble, and nutation. , and denotes the number of motion parameters for each type of micro-motion form. and are the parameter ranges.
- (2)
- Generate a possible range of search intervals for each motion parameter, and the micro-motion parameter space consists of motion parameter ranges and search intervals, given asTherefore, the micro-motion parameter space for the ith parameter under m motion can be expressed aswhere is the search interval selected from the subsequent search grid evaluation.
- (3)
- According to (31), the micro-motion parameter space can be rewritten aswhere represents the total sample number in m motion.Further, construct the TFFR sequence templates of the micro-motion scattering centers based on (32) as follows:where and denote the IF and IFR sequences of the pth point scatterer in m motion. For a more intuitive display, the TFFR sequence templates of each kind of micro-motion are given as
- (1)
- For different micro-motions, randomly generate K sequences of the IF and IFR within the preset motion parameter ranges as follows:
- (2)
- Determine the optimal search interval for each parameter by calculating the identification accuracy between and . According to (50), the identification accuracy can be denoted by
- (3)
- The search intervals are chosen when the corresponding micro-motions can be correctly discriminated. The optimal intervals satisfy:
5.2. TFFR Spatial Trajectory Extraction
5.3. Minimum Association Error Calculation
6. Verification and Analysis for Micro-Motion Identification
6.1. Results of Simulated Space Cone-Shaped Target
6.2. Results of Electromagnetic Calculated Space Cone-Shaped Target
6.3. Results of Simulated Space Cone-Cylinder Target
6.4. Summary
7. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Hanif, A.; Muaz, M.; Hasan, A.; Adeel, M. Micro-Doppler based target recognition with radars: A review. IEEE Sens. J. 2022, 22, 2948–2961. [Google Scholar] [CrossRef]
- Gao, H.; Xie, L.; Wen, S.; Kuang, Y. Micro-Doppler signature extraction from ballistic target with micro-motions. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1969–1982. [Google Scholar] [CrossRef]
- Lei, P.; Wang, J.; Sun, J. Analysis of radar micro-Doppler signatures from rigid targets in space based on inertial parameters. IET Radar Sonar Navig. 2011, 5, 93–102. [Google Scholar] [CrossRef]
- He, F.; Xiao, Z. Micro-motion modelling and analysis of extended ballistic targets based on inertial parameters. Electron. Lett. 2013, 49, 129–130. [Google Scholar] [CrossRef]
- Thayaparan, T.; Abrol, S.; Riseborough, E.; Stankovic, L.; Lamothe, D.; Duff, G. Analysis of radar micro-Doppler signatures from experimental helicopter and human data. IET Radar Sonar Navig. 2007, 1, 289–299. [Google Scholar] [CrossRef]
- Chen, V.C. Detection and analysis of human motion by radar. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–4. [Google Scholar]
- Cohen, L. Time-Frequency Analysis; Prentice Hall: Hoboken, NJ, USA, 1995; Volume 778. [Google Scholar]
- Djurović, I.; Stanković, L.J. XWD-algorithm for the instantaneous frequency estimation revisited: Statistical analysis. Signal Process. 2014, 94, 642–649. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, X.; Li, W.; Li, Z.; Zhang, Y.; Zhou, J. Analysis of micro-Doppler signatures of vibration targets using EMD and SPWVD. Neurocomputing 2016, 171, 48–56. [Google Scholar] [CrossRef]
- O’shea, P. A new technique for instantaneous frequency rate estimation. IEEE Signal Process. Lett. 2002, 9, 251–252. [Google Scholar] [CrossRef]
- O’shea, P. A fast algorithm for estimating the parameters of a quadratic FM signal. IEEE Trans. Signal Process. 2004, 52, 385–393. [Google Scholar] [CrossRef]
- Zuo, L.; Li, M.; Liu, Z.; Ma, L. A high-resolution time-frequency rate representation and the cross-term suppression. IEEE Trans. Signal Process. 2016, 64, 2463–2474. [Google Scholar] [CrossRef]
- Abeysekera, S.S. Time-frequency and time-frequency-rate representations using the cross quadratic spectrum. In Proceedings of the IEEE 2013 Tencon-Spring, Sydney, Australia, 17–19 April 2013; pp. 500–504. [Google Scholar]
- Zhu, X.; Yang, H.; Zhang, Z.; Gao, J.; Liu, N. Frequency-chirprate reassignment. Digit. Signal Process. 2020, 104, 102783. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, Z.; Gao, J. Three-dimension extracting transform. Signal Process. 2021, 179, 107830. [Google Scholar] [CrossRef]
- Lei, P.; Wang, J.; Guo, P.; Cai, D. Automatic classification of radar targets with micro-motions using entropy segmentation and time-frequency features. AEU-Int. J. Electron. Commun. 2011, 65, 806–813. [Google Scholar] [CrossRef]
- Du, L.; Li, L.; Wang, B.; Xiao, J. Micro-Doppler feature extraction based on time-frequency spectrogram for ground moving targets classification with low-resolution radar. IEEE Sens. J. 2016, 16, 3756–3763. [Google Scholar] [CrossRef]
- Persico, A.R.; Clemente, C.; Gaglione, D.; Ilioudis, C.V.; Cao, J.; Pallotta, L.; De Maio, A.; Proudler, I.; Soraghan, J.J. On model, algorithms, and experiment for micro-Doppler-based recognition of ballistic targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1088–1108. [Google Scholar] [CrossRef]
- Persico, A.R.; Ilioudis, C.V.; Clemente, C.; Soraghan, J.J. Novel classification algorithm for ballistic target based on HRRP frame. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3168–3189. [Google Scholar] [CrossRef]
- Kim, Y.; Moon, T. Human Detection and Activity Classification Based on Micro-Doppler Signatures Using Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2016, 13, 8–12. [Google Scholar] [CrossRef]
- Wang, S.; Li, M.; Yang, T.; Ai, X.; Liu, J.; Andriulli, F.P.; Ding, D. Cone-Shaped Space Target Inertia Characteristics Identification by Deep Learning with Compressed Dataset. IEEE Trans. Antennas Propag. 2022, 70, 5217–5226. [Google Scholar] [CrossRef]
- Tian, X.; Bai, X.; Xue, R.; Qin, R.; Zhou, F. Fusion recognition of space targets with micromotion. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3116–3125. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, W.; Jiang, W. Recognition of Ballistic Targets by Fusing Micro-Motion Features with Networks. Remote Sens. 2022, 14, 5678. [Google Scholar] [CrossRef]
- Zhao, Y.; Su, Y. The extraction of micro-Doppler signal with EMD algorithm for radar-based small UAVs’ detection. IEEE Trans. Instrum. Meas. 2019, 69, 929–940. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Zhao, S.; Niu, J.; Li, X.; Qiao, C. Improved HHT and its application in narrowband radar imaging for precession cone-shaped targets. J. Syst. Eng. Electron. 2014, 25, 977–986. [Google Scholar] [CrossRef]
- Chen, S.; Peng, Z.; Yang, Y.; Dong, X.; Zhang, W. Intrinsic chirp component decomposition by using Fourier series representation. Signal Process. 2017, 137, 319–327. [Google Scholar] [CrossRef]
- Stanković, L.; Djurović, I.; Stanković, S.; Simeunović, M.; Djukanović, S.; Daković, M. Instantaneous frequency in time–frequency analysis: Enhanced concepts and performance of estimation algorithms. Digit. Signal Process. 2014, 35, 1–13. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Q.H. IF estimation of overlapped multicomponent signals based on viterbi algorithm. Circuits Syst. Signal Process. 2020, 39, 3105–3124. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Xing, G.; Peng, Z.; Zhang, W.; Meng, G. Separation of overlapped non-stationary signals by ridge path regrouping and intrinsic chirp component decomposition. IEEE Sens. J. 2017, 17, 5994–6005. [Google Scholar] [CrossRef]
- Peng, Y.; Ding, Y.; Zhang, J.; Jin, B.; Chen, Y. Target Trajectory Estimation Algorithm Based on Time-Frequency Enhancement. IEEE Trans. Instrum. Meas. 2022, 72, 1–7. [Google Scholar] [CrossRef]
- Li, P.; Wang, D.C.; Chen, J.L. Parameter estimation for micro-Doppler signals based on cubic phase function. Signal Image Video Process. 2013, 7, 1239–1249. [Google Scholar] [CrossRef]
- Serbes, A.; Aldimashki, O. A fast and accurate chirp rate estimation algorithm based on the fractional Fourier transform. In Proceedings of the 2017 25th European Signal Processing Conference (EUSIPCO), Kos, Greece, 28 August–2 September 2017; pp. 1105–1109. [Google Scholar]
- Li, D.; Zhan, M.; Zhang, X.; Fang, Z.; Liu, H. ISAR imaging of nonuniformly rotating target based on the multicomponent CPS model under low SNR environment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1119–1135. [Google Scholar] [CrossRef]
- Li, L.; Han, N.; Jiang, Q.; Chui, C.K. A chirplet transform-based mode retrieval method for multicomponent signals with crossover instantaneous frequencies. Digit. Signal Process. 2022, 120, 103262. [Google Scholar] [CrossRef]
- Zhang, W.; Fu, Y.; Li, Y. Sparse time-frequency-frequency-rate representation for multicomponent nonstationary signal analysis. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 717–721. [Google Scholar]
- Ding, C.; Hong, H.; Zou, Y.; Chu, H.; Zhu, X.; Fioranelli, F.; Le Kernec, J.; Li, C. Continuous human motion recognition with a dynamic range-Doppler trajectory method based on FMCW radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6821–6831. [Google Scholar] [CrossRef]
- Liu, L.; McLernon, D.; Ghogho, M.; Hu, W.; Huang, J. Ballistic missile detection via micro-Doppler frequency estimation from radar return. Digit. Signal Process. 2012, 22, 87–95. [Google Scholar] [CrossRef]
- Ma, L.; Liu, J.; Wang, T.; Li, Y.; Wang, X. The micro-Doppler character of sliding-type scattering center on rotationally symmetric target. Sci. China Ser. F Inf. Sci. 2010, 53, 1–18. [Google Scholar]
- Murray, R.M.; Li, Z.; Sastry, S.S. A mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bai, X.; Bao, Z. High-Resolution 3D Imaging of Precession Cone-Shaped Targets. IEEE Trans. Antennas Propag. 2014, 62, 4209–4219. [Google Scholar] [CrossRef]
- Meignen, S.; Pham, D.H.; McLaughlin, S. On demodulation, ridge detection, and synchrosqueezing for multicomponent signals. IEEE Trans. Signal Process. 2017, 65, 2093–2103. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 11. [Google Scholar]
- Shi, X.; Zhou, F.; Tao, M.; Zhang, Z. Human movements separation based on principle component analysis. IEEE Sens. J. 2015, 16, 2017–2027. [Google Scholar] [CrossRef]
- Zhang, W.; Fu, Y. GLRT detection of micromotion targets for the multichannel SAR-GMTI system. IEEE Geosci. Remote Sens. Lett. 2018, 16, 60–64. [Google Scholar] [CrossRef]
- Kumar, M.; Kelly, P.K. Non-Linear Signal Processing methods for UAV detections from a Multi-function X-band Radar. Drones 2023, 7, 251. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Form | Coning Fre. (Hz) | Coning Ang. (°) | Wobble Fre. (Hz) | Wobble Ang. (°) |
|---|---|---|---|---|
| Precession | 1.0–1.5 | 10–15 | – | – |
| Wobble | – | – | 1.0–1.5 | 10–15 |
| Nutation | 1.0–1.5 | 10–15 | 1.0–1.5 | 6–9 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Carrier frequency | 10 GHz | x-coordinate | (−1, 1) m |
| Sampling frequency | 1024 Hz | y-coordinate | (−1, 1) m |
| Observation time | 1 s | z-coordinate | (−1, 1) m |
| Azimuth angle | 270° | Elevation angle | (20, 45)° |
| Form | Precession | Wobble | Nutation |
|---|---|---|---|
| Coning fre. (Hz) | 1.0:0.05:1.5 | - | 1.0:0.1:1.5 |
| Wobble fre. (Hz) | - | 1.0:0.05:1.5 | 1.0:0.1:1.5 |
| Coning ang. (°) | 10:0.5:15 | - | 10:1:15 |
| Wobble ang. (°) | - | 10:0.5:15 | 6:1:9 |
| Elevation ang. (°) | 20:2:45 | 20:2:45 | 20:5:45 |
| Methods | Accuracy | Average | ||
|---|---|---|---|---|
| Precession | Wobble | Nutation | Accuracy | |
| VA (TF) | 50.60 | 82.40 | 99.00 | 77.33 |
| RPRG (TF) | 69.40 | 80.80 | 98.60 | 82.93 |
| STSR (TF) | 92.80 | 89.20 | 93.60 | 91.87 |
| STSR (TFFR) | 94.00 | 91.20 | 96.00 | 93.73 |
| SNR (dB) | Average Accuracy | |||
|---|---|---|---|---|
| VA (TF) | RPRG (TF) | STSR (TF) | STSR (TFFR) | |
| 10 | 83.00 | 80.17 | 92.67 | 94.17 |
| 5 | 81.17 | 77.00 | 89.50 | 92.17 |
| 3 | 80.67 | 71.50 | 83.50 | 86.00 |
| Methods | Accuracy | Average | ||
|---|---|---|---|---|
| Precession | Wobble | Nutation | Accuracy | |
| VA (TF) | 83.00 | 66.00 | 96.00 | 81.67 |
| RPRG (TF) | 78.00 | 74.50 | 97.50 | 83.33 |
| STSR (TF) | 85.00 | 86.00 | 95.00 | 88.67 |
| STSR (TFFR) | 86.00 | 95.00 | 97.00 | 92.67 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, W.; Liu, Y.; Yang, W.; Yong, S. Scatterer-Level Time-Frequency-Frequency Rate Representation for Micro-Motion Identification. Remote Sens. 2023, 15, 4917. https://doi.org/10.3390/rs15204917
Zhang H, Zhang W, Liu Y, Yang W, Yong S. Scatterer-Level Time-Frequency-Frequency Rate Representation for Micro-Motion Identification. Remote Sensing. 2023; 15(20):4917. https://doi.org/10.3390/rs15204917
Chicago/Turabian StyleZhang, Honglei, Wenpeng Zhang, Yongxiang Liu, Wei Yang, and Shaowei Yong. 2023. "Scatterer-Level Time-Frequency-Frequency Rate Representation for Micro-Motion Identification" Remote Sensing 15, no. 20: 4917. https://doi.org/10.3390/rs15204917