
Optimal Automatic Wide-Area Discrimination of Fish Shoals from Seafloor Geology with Multi-Spectral Ocean Acoustic Waveguide Remote Sensing in the Gulf of Maine


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
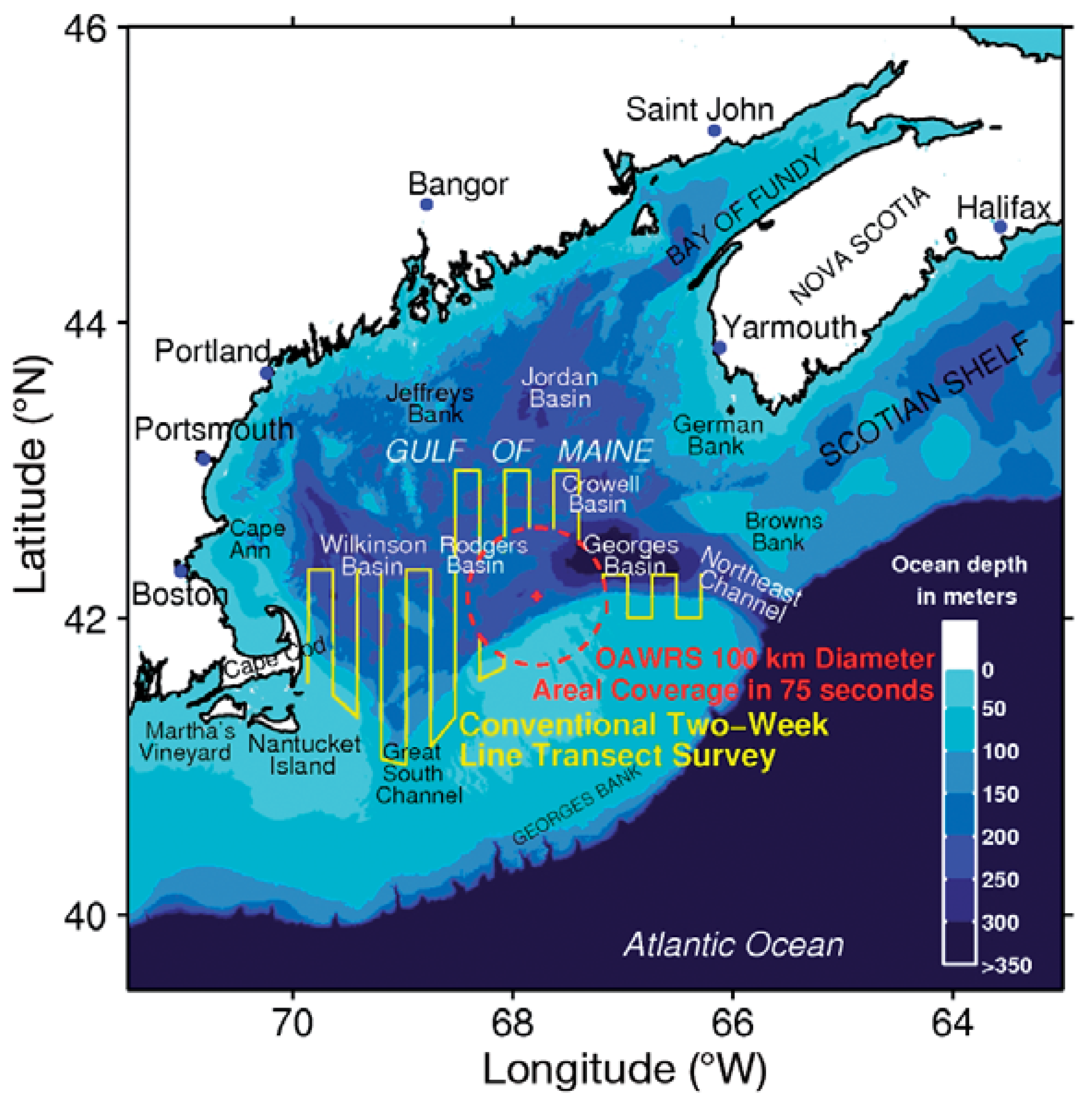
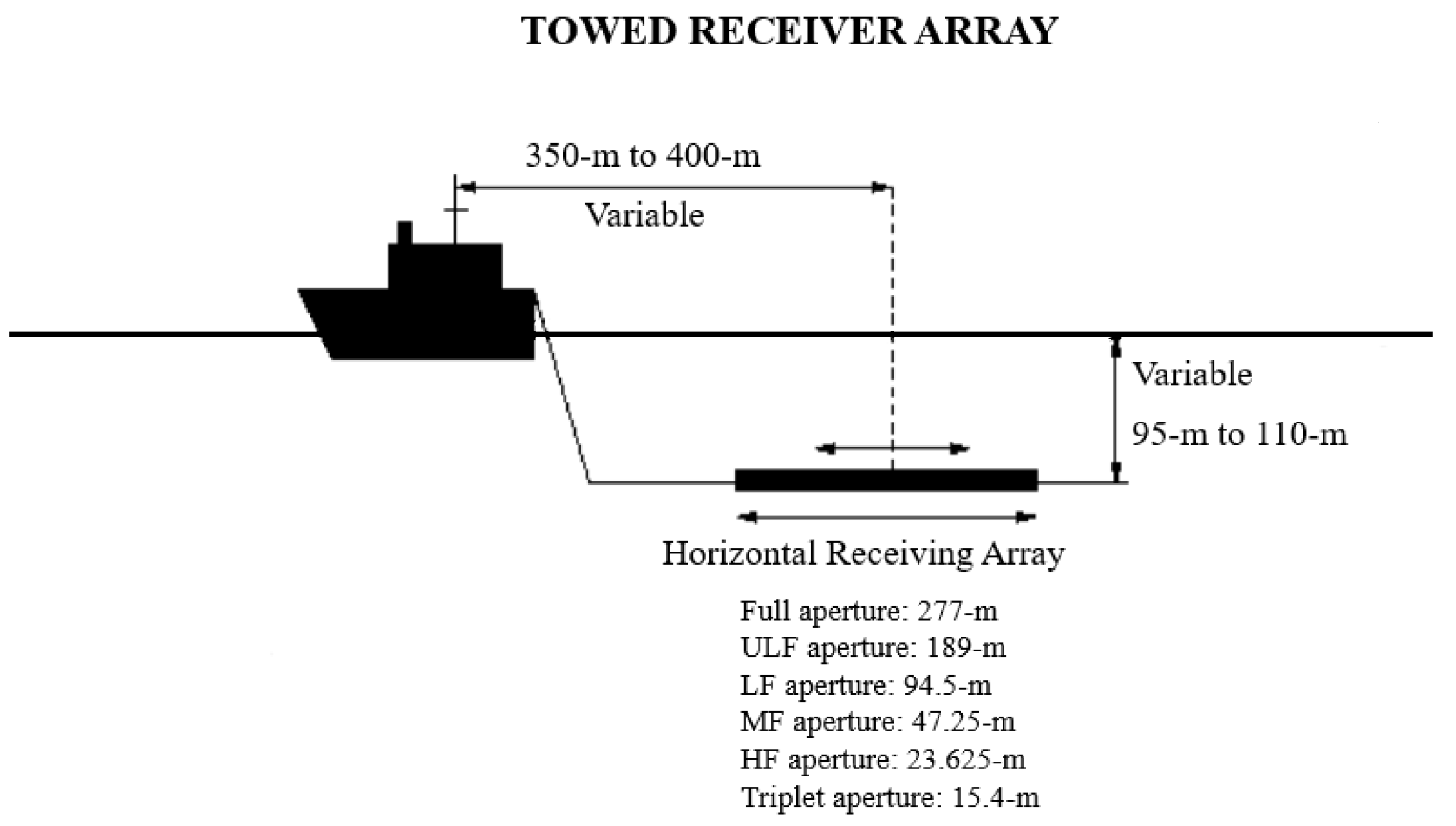
2.1. OAWRS Gulf of Maine 2006 Experiment
2.2. Automatic Distinction of Fish Shoals from Seafloor in Multi-Spectral OAWRS Imagery via Neyman–Pearson Hypothesis Testing
3. Results
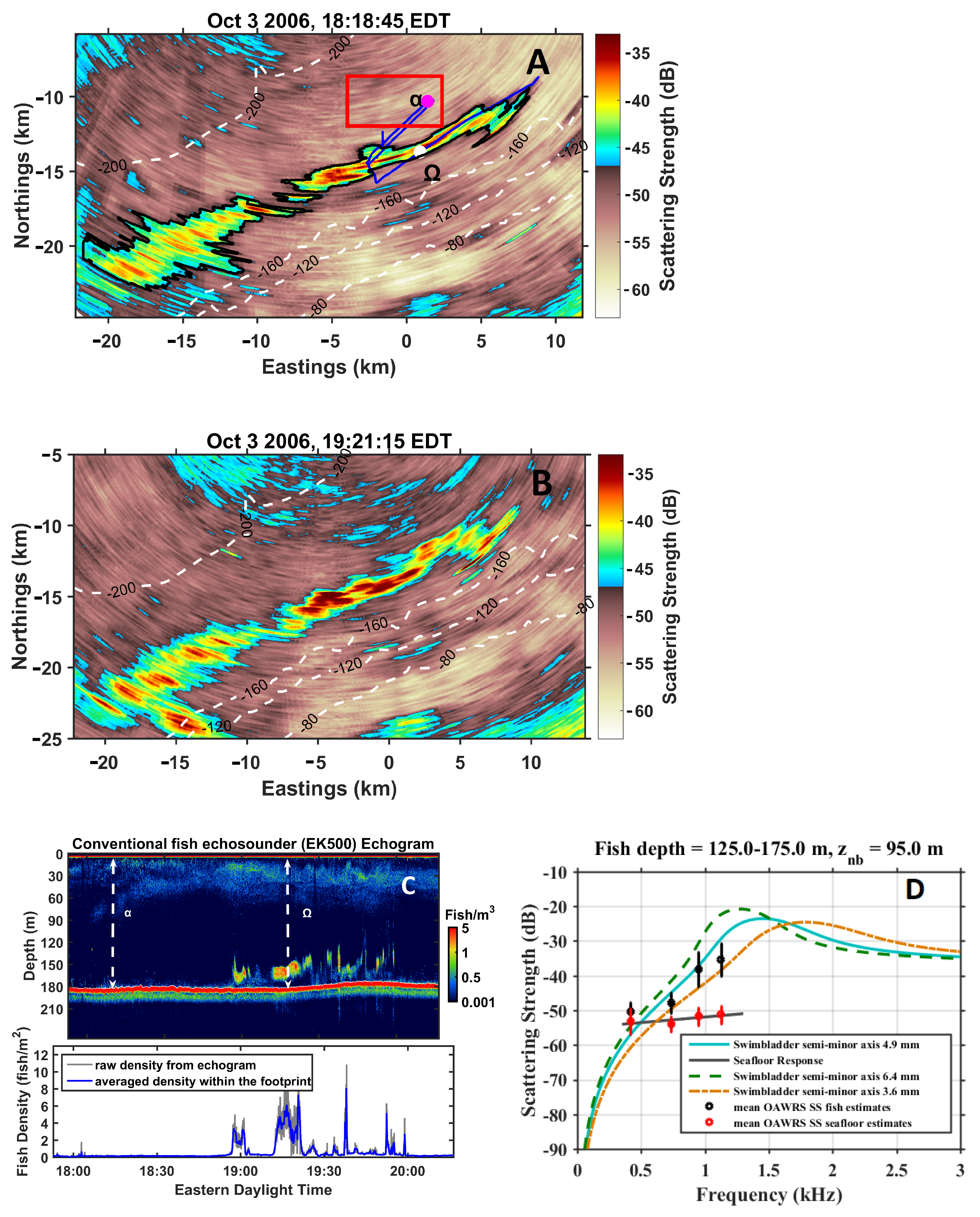
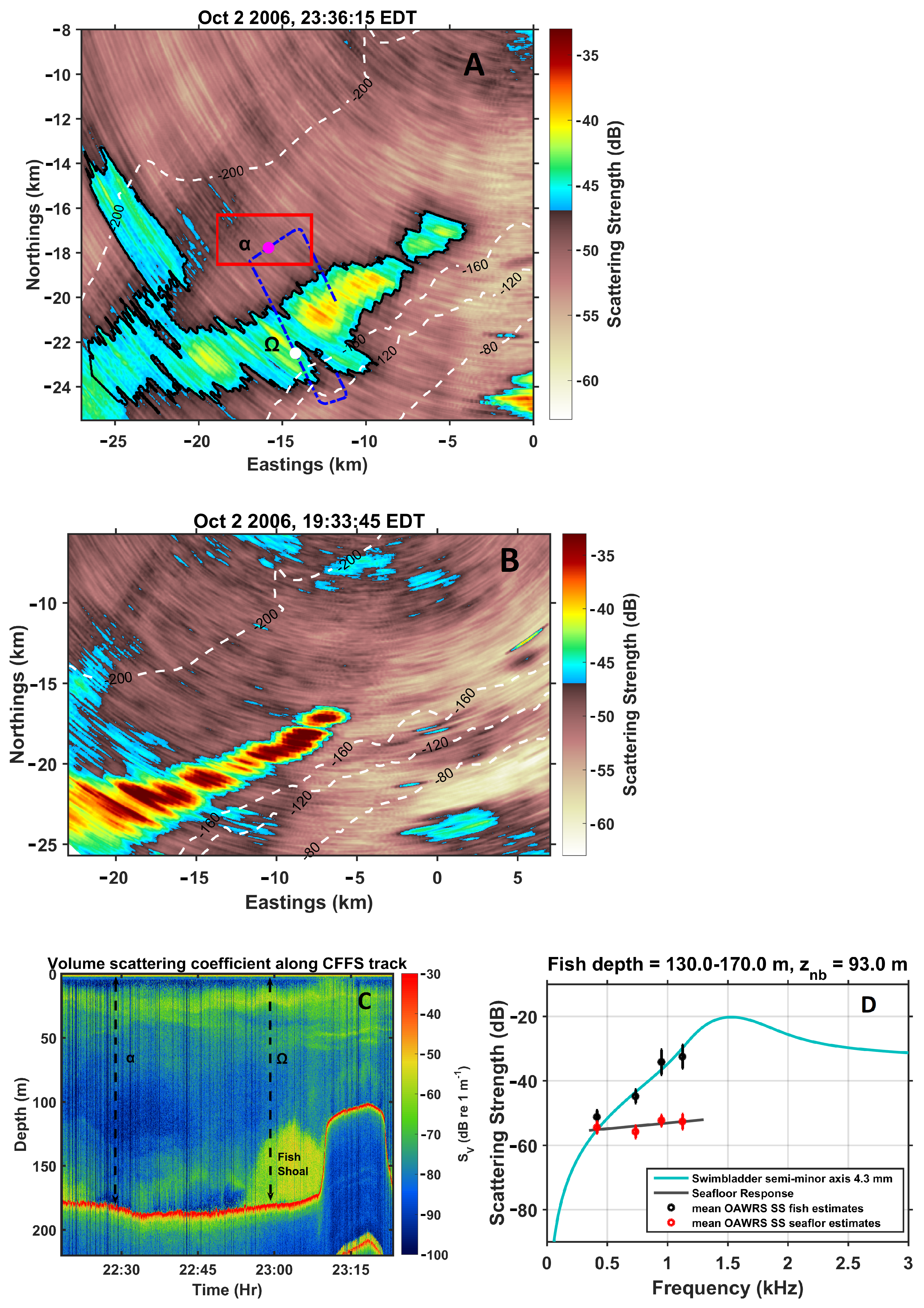
3.1. Automatic Optimal Discrimination of Fish from Seafloor Geology with Absolute Scattering Strength Levels
3.2. Automatic Optimal Discrimination of Fish from Seafloor Geology with Relative Spectral Dependencies
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Spectral Distinction of Fish Shoals from Seafloor Using Generalization of Kullback–Leibler Divergence



References
- Gødo, O.R. Technology Answers to the Requirements Set by the Ecosystem Approach. In The Future of Fisheries Science in North America; Beamish, R.J., Rothschild, B.J., Eds.; Fish and Fisheries Series; Springer: Dordrecht, The Netherlands, 2009; Volume 31, pp. 373–403. [Google Scholar]
- Nakken, O. Norwegian Spring-Spawning Herring & Northeast Arctic Cod: 100 Years of Research Management, 1st ed.; Tapir Academic Press: Trondheim, Norway, 2008. [Google Scholar]
- Makris, N.C.; Ratilal, P.; Symonds, D.T.; Jagannathan, S.; Lee, S.; Nero, R.W. Fish Population and behavior revealed by instantaneous continental shelf-scale imaging. Science 2006, 311, 660–663. [Google Scholar] [CrossRef] [PubMed]
- Overholtz, W.J.; Jech, J.M.; Michaels, W.I.; Jacobson, I.D.; Sullivan, P.J. Empirical comparisons of survey design in acoustic surveys of Gulf of Maine-Georges Bank Atlantic herring. J. Northwest Atl. Fish. Sci. 2006, 36, 127–144. [Google Scholar] [CrossRef]
- Overholtz, W.J.; Friedland, K.D. Recovery of the Gulf of Maine herring (Clupea harengus) complex: Perspectives based on bottom trawl survey data. Fish. Bull 2002, 100, 593–608. [Google Scholar]
- Jagannathan, S.; Bertsatos, I.; Symonds, D.; Chen, T.; Nia, H.; Jain, A.; Andrews, M.; Gong, Z.; Nero, R.; Ngor, L.; et al. Ocean Acoustic Waveguide Remote Sensing (OAWRS) of marine ecosystems. Mar. Ecol. Prog. Ser. 2009, 395, 137–160. [Google Scholar] [CrossRef]
- Makris, N.C.; Ratilal, P.; Jagannathan, S.; Gong, Z.; Andrews, M.; Bertsatos, I.; Gødo, O.R.; Nero, R.W.; Jech, M. Critical population density triggers rapid formation of vast oceanic fish shoals. Science 2009, 323, 1734–1737. [Google Scholar] [CrossRef] [Green Version]
- Makris, N.C.; Godø, O.R.; Yi, D.H.; Macaulay, G.J.; Jain, A.D.; Cho, B.; Gong, Z.; Jech, M.J.; Ratilal, P. Instantaneous areal population density of entire Atlantic cod and herring spawning groups and group size distribution relative to total spawning population. Fish Fish. 2019, 20, 201–213. [Google Scholar] [CrossRef] [Green Version]
- Duane, D.; Cho, B.; Jain, A.D.; Gødo, O.R.; Makris, N.C. The Effect of Attenuation from Fish Shoals on Long-Range, Wide-Area Acoustic Sensing in the Ocean. Remote Sens. 2019, 11, 2464. [Google Scholar] [CrossRef] [Green Version]
- Duane, D.; Gødo, O.R.; Makris, N.C. Quantification of Wide-Area Norwegian Spring-Spawning Herring Population Density with Ocean Acoustic Waveguide Remote Sensing (OAWRS). Remote Sens. 2021, 13, 4546. [Google Scholar] [CrossRef]
- Duane, D.; Zhu, C.; Piavsky, F.; Godø, O.R.; Makris, N.C. The Effect of Attenuation from Fish on Passive Detection of Sound Sources in Ocean Waveguide Environments. Remote Sens. 2021, 13, 4369. [Google Scholar] [CrossRef]
- Yi, D.H.; Gong, Z.; Jech, J.M.; Ratilal, P.; Makris, N.C. Instantaneous 3D Continental-Shelf Scale Imaging of Oceanic Fish by Multi-Spectral Resonance Sensing Reveals Group Behavior during Spawning Migration. Remote Sens. 2018, 10, 108. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Garcia, H.; Huang, W.; Tran, D.D.; Jain, A.D.; Yi, D.H.; Gong, Z.; Jech, J.M.; Gødo, O.R.; Makris, N.C.; et al. Vast assembly of vocal marine mammals from diverse species on fish spawning ground. Nature 2016, 531, 366–369. [Google Scholar] [CrossRef] [PubMed]
- Overholtz, W.J. The Gulf of Maine-Georges Bank Atlantic herring (Clupea harengus): Spatial pattern analysis of the collapse and recovery of a large marine fish complex. Fish. Res. 2002, 57, 237–254. [Google Scholar] [CrossRef]
- Love, R.H. A comparison of volume scattering strength data with model calculations based on quasisynoptically collected fishery data. J. Acoust. Soc. Am. 1993, 94, 2255–2268. [Google Scholar] [CrossRef]
- Jain, A.D.; Ignisca, A.; Yi, D.H.; Ratilal, P.; Makris, N.C. Feasibility of Ocean Acoustic Waveguide Remote Sensing (OAWRS) of Atlantic Cod with Seafloor Scattering Limitations. Remote Sens. 2013, 6, 180–208. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Andrews, M.; Jagannathanm, S.; Patel, R.; Jech, J.; Makris, N.C.; Ratilal, P. Low-frequency target strength and abundance of shoaling Atlantic herring (Clupea harengus) in the Gulf of Maine during the Ocean Acoustic Waveguide Remote Sensing 2006 Experiment. J. Acoust. Soc. Am. 2010, 127, 104–123. [Google Scholar] [CrossRef]
- Chen, T.; Ratilal, P.; Makris, N.C. Temporal coherence after multiple forward scattering through inhomogeneities in an ocean waveguide. J. Acoust. Soc. Am. 2008, 124, 2812–2822. [Google Scholar] [CrossRef] [Green Version]
- Yi, D.H.; Makris, N.C. Feasibility of Acoustic Remote Sensing of Large Herring Shoals and Seafloor by Baleen Whales. Remote Sens. 2016, 8, 693. [Google Scholar] [CrossRef] [Green Version]
- Cho, B.; Makris, N.C. Predicting the Effects of Random Ocean Dynamic Processes on Underwater Acoustics Sensing and Communication. Sci. Rep. 2020, 10, 4525. [Google Scholar] [CrossRef] [Green Version]
- Schinault, M.E.; Seri, S.G.; Radermacher, M.K.; Mohebbi-Kalkhoran, H.; Zhu, C.; Makris, N.C.; Ratilal, P. Development of a large-aperture 160-element coherent hydrophone array system for instantaneous wide area ocean acoustic sensing. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022. [Google Scholar]
- Mohebbi-Kalkhoran, H.; Schinault, M.E.; Makris, N.C.; Ratilal, P. Integrated computing system for real-time data processing, storage, and communication for large aperture 160-element coherent hydrophone array. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022. [Google Scholar]
- Ratilal, P.; Seri, S.G.; Mohebbi-Kalkhoran, H.; Zhu, B.; Schinault, M.E.; Radermacher, M.K.; Makris, N.C. Continental Shelf-scale Passive Ocean Acoustic Waveguide Remote Sensing of Marine Ecosystems, Dynamics and Directional Soundscapes: Sensing Whales, Fish, Ships and other Sound Producers in near Real-Time. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022. [Google Scholar]
- Kay, S.M. Fundamental of Statistical Signal Processing—Vol. 2 Detection Theory, 1st ed.; McGraw-Hill: Providence, RI, USA, 1993; pp. 60–93. [Google Scholar]
- Andrews, M.; Chen, J.M.; Ratilal, P. Empirical dependence of acoustic transmission scintillation statistics on bandwidth, frequency, and range on New Jersey continental shelf. J. Acoust. Soc. Am. 2009, 125, 111–124. [Google Scholar] [CrossRef] [Green Version]
- Makris, N.C. A foundation for logarithmic measures of fluctuating intensity in pattern recognition. Opt. Lett. 1995, 20, 2012–2014. [Google Scholar] [CrossRef]
- Makris, N.C. The effect of saturated transmission scintillation on ocean acoustic intensity measurements. J. Acoust. Soc. Am. 1996, 100, 769–783. [Google Scholar] [CrossRef]
- Jain, A.D.; Makris, N.C. Maximum Likelihood Deconvolution of Beamformed Images with Signal-Dependent Speckle Fluctuations from Gaussian Random Fields: With Application to Ocean Acoustic Waveguide Remote Sensing (OAWRS). Remote Sens. 2016, 8, 694. [Google Scholar] [CrossRef] [Green Version]
- Becker, K.; Preston, J. The ONR five octave research array (FORA) at Penn State. In Proceedings of the Oceans 2003, Celebrating the Past…Teaming Toward the Future. (IEEE Cat. No.03CH37492), San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. 2607–2610. [Google Scholar]
- Wang, D.; Ratilal, P. Angular Resolution Enhancement Provided by Nonuniformly-Spaced Linear Hydrophone Arrays in Ocean Acoustic Waveguide Remote Sensing. Remote Sens. 2017, 9, 1036. [Google Scholar] [CrossRef] [Green Version]
- Makris, N.C.; Avelino, I.Z.; Menis, R. Deterministic reverbation from ocean ridges. J. Acoust. Soc. Am. 1994, 97, 3547–3574. [Google Scholar] [CrossRef]
- Ratilal, P.; Lai, Y.; Symonds, D.; Ruhlmann, I.A.; Preston, J.R.; Scheer, E.K.; Garr, M.T.; Holland, C.W.; Goff, J.A.; Makris, N.C. Long range acoustic imaging of the continental shelf environment: The Acoustic Clutter Reconnaissance Experiment 2001. J. Acoust. Soc. Am. 2005, 117, 1977–1998. [Google Scholar] [CrossRef] [Green Version]
- Love, R.H. Resonant acoustic scattering by swimbladder-bearing fish. J. Acoust. Soc. Am. 1978, 64, 571–580. [Google Scholar] [CrossRef]
- Pearson, K. On the criterion that a given system of deviations from the probable in the case of a correlated system of variables is such that it can be reasonably supposed to have arisen from random sampling. Philos. Mag. 1900, 50, 157–175. [Google Scholar] [CrossRef] [Green Version]
- Kay, S.M. Fundamental of Statistical Signal Processing—Vol. 1 Estimation Theory, 1st ed.; McGraw-Hill: Providence, RI, USA, 1993. [Google Scholar]
- Kaklamanis, E. Spectral Discrimination of Fish Shoals from Seafloor in the Gulf of Maine during the Ocean Acoustic Waveguide Remote Sensing (OAWRS) 2006 Experiment. Ph.D. Thesis, Massachusetts Institute of Technology (MIT), Cambridge, MA, USA, 2021. [Google Scholar]
- Kullback, S. Information Theory and Statistics; John Wiley and Sons: Hoboken, NJ, USA, 1959. [Google Scholar]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eleftherios, K.; Ratilal, P.; Makris, N.C. Optimal Automatic Wide-Area Discrimination of Fish Shoals from Seafloor Geology with Multi-Spectral Ocean Acoustic Waveguide Remote Sensing in the Gulf of Maine. Remote Sens. 2023, 15, 437. https://doi.org/10.3390/rs15020437
Eleftherios K, Ratilal P, Makris NC. Optimal Automatic Wide-Area Discrimination of Fish Shoals from Seafloor Geology with Multi-Spectral Ocean Acoustic Waveguide Remote Sensing in the Gulf of Maine. Remote Sensing. 2023; 15(2):437. https://doi.org/10.3390/rs15020437
Chicago/Turabian StyleEleftherios, Kaklamanis, Purnima Ratilal, and Nicholas C. Makris. 2023. "Optimal Automatic Wide-Area Discrimination of Fish Shoals from Seafloor Geology with Multi-Spectral Ocean Acoustic Waveguide Remote Sensing in the Gulf of Maine" Remote Sensing 15, no. 2: 437. https://doi.org/10.3390/rs15020437