As discussed in the previous section, to correctly interpret and make use of the IS data, one needs to carefully determine the operating parameters of the IS device. Even though some of the relevant parameters were calibrated with ground-based experiments before launch or in-orbit experiments in the commissioning phase, large disturbances during the launch, consumption of consumable gas, aging of the electric units, etc., may still cause changes in the characteristics of the IS device. Therefore, for Taiji-1’s IS system and missions that carry similar electrostatic IS payloads, it is necessary to calibrate the basic set of operating parameters, including the scale factors , linear bias , and the COM offset with the in-orbit data and regularly within the mission lifetime.
In the following, we discuss the calibration principles of this set of parameters and the related satellite maneuver strategies, that are adopted for Taiji-1’s calibration. The key considerations here are to try to complete the IS calibrations with less satellite maneuvers and shorter calibration time durations and try to reduce the possible risks as much as possible.
3.1. Principle of Scale Factors and COM Offset Calibrations
For electrostatic IS systems with parallelepipedic TMs such as Taiji-1, GRACE/GRACE-FO, etc., the scale factors appeared in Equation (4) can be divided into two sets, that the linear scale factors
and angular scale factors
, which transform the actuation voltages imposed on the electrodes into the corresponding compensation linear accelerations
and angular accelerations
, respectively. For Taiji-1, given the geometrical and mechanical parameters of the TM and the electrodes, the nominal values of the two sets of scale factors can be derived,
Here,
M stands for the mass of the TM,
,
,
denote the mass moment of the TM along the
x,
y and
z axes.
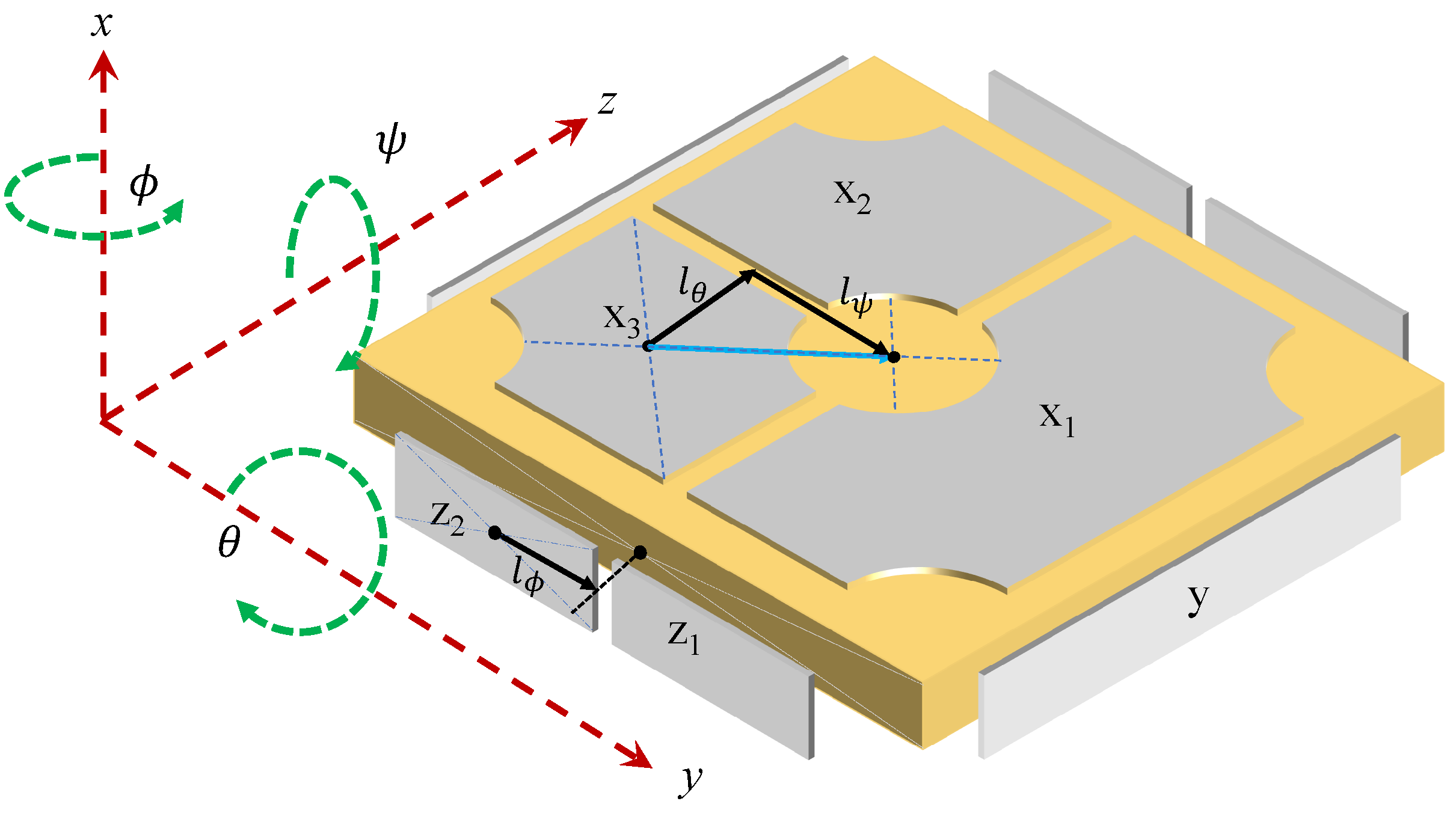
is the total area of electrode surface of the
ith axis,
the nominal distance between the TM surface and the electrode, and
denotes the force arm of the electrodes pair that control the
rotation degree of freedom (see again
Figure 3).
stands for the vacuum permittivity, and
stands for the preload-biased voltage. The values of these parameters for Taiji-1 are shown in
Table 1, and the transformation relations between the actuation voltages and compensation accelerations are shown in
Table 3.
According to the designs of the Taiji-1’s IS system, we have the following useful relations in calibrating the linear scale factors and the COM offset,
These relations remained unchanged during the mission lifetime because they involve only the geometrical and mechanical properties of the TM and the electrode cage. The high machining accuracy (
) of the TM and cage structures ensures that the relations between the scale factors are sufficiently accurate. In this case, where
and
, we have
. Another important property is that during the normal science operation of the IS in its ACC mode the TM is controlled to tightly follow the motions of the electrode cage or the spacecraft. For Taiji-1, the position fluctuations of the TM relative to each electrode surface are ≤
in the sensitive band. This means that the rotations of the TM and the spacecraft could be treated as precisely synchronized, that one has
Here,
,
,
, and
denote the angular velocities and angular accelerations of the TM and the spacecraft, respectively.
Therefore, despite the offset between the installation orientations of the IS system and the star trackers, the measured angular velocities and accelerations of the spacecraft and the TM are interchangeable.
The rotations or attitude variations
and
of the spacecraft could be independently measured by on-board star trackers. This motivates us to make use of such attitude measurements to calibrate the scale factors, which is different from the former methods based on precision orbit determination (POD) data [
21,
32]. One could swing the spacecraft periodically along a certain axis with a rather large angular accelerations and with relatively higher frequency compared to the signal band of air drags and solar radiations, which could be clearly identified and precisely measured by the IS system. With the inputs of the angular accelerations derived by the star track measurements and the actuation voltages readout by the front end electric unit of the IS system, one can fit the angular scale factors
based on the equations in
Table 3 with the least squares estimation or the Kalman filter algorithms. According to the relations between angular and linear scale factors in Equations (8)–(10), the linear scale factors can be further determined. For Taiji-1’s IS, controls along the y-axis are independent of other degrees of freedom, and their actuation voltage does not involve any rotation controls of the TM.
Therefore, the linear scale factor
for Taiji-1’s IS system cannot be calibrated with this method and is left blank in this work. Please see
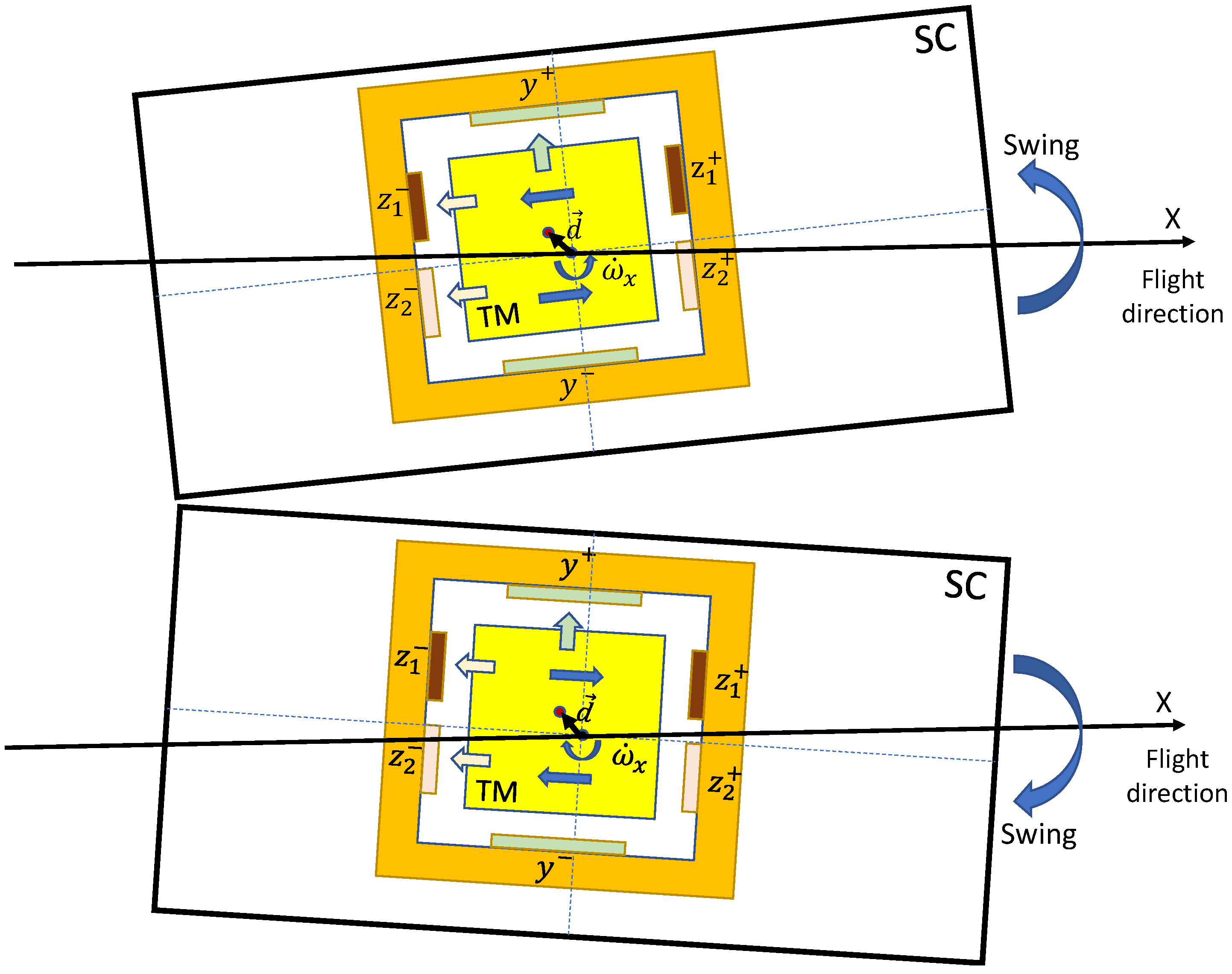
Figure 4 for an illustration of this calibration method.
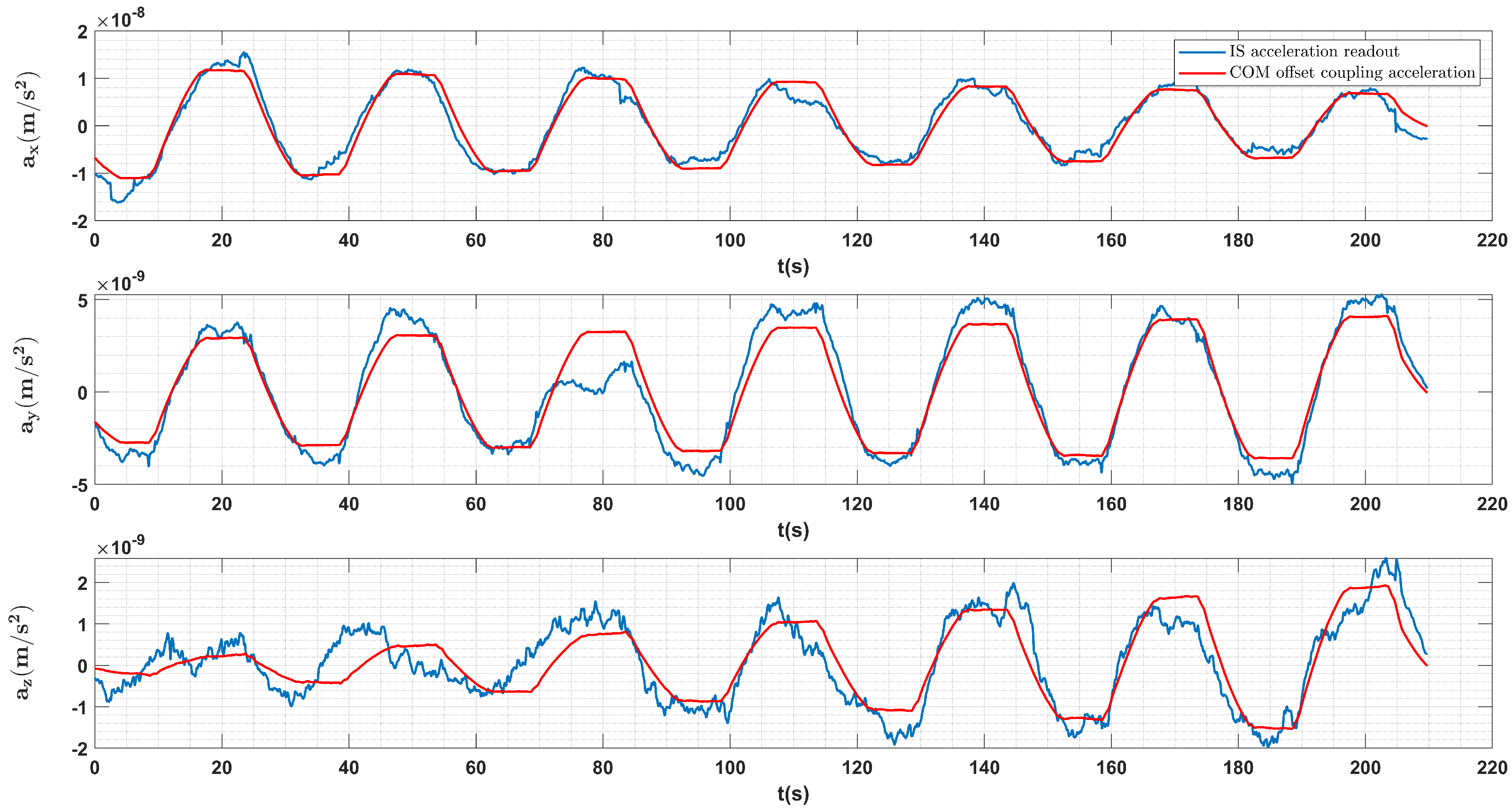
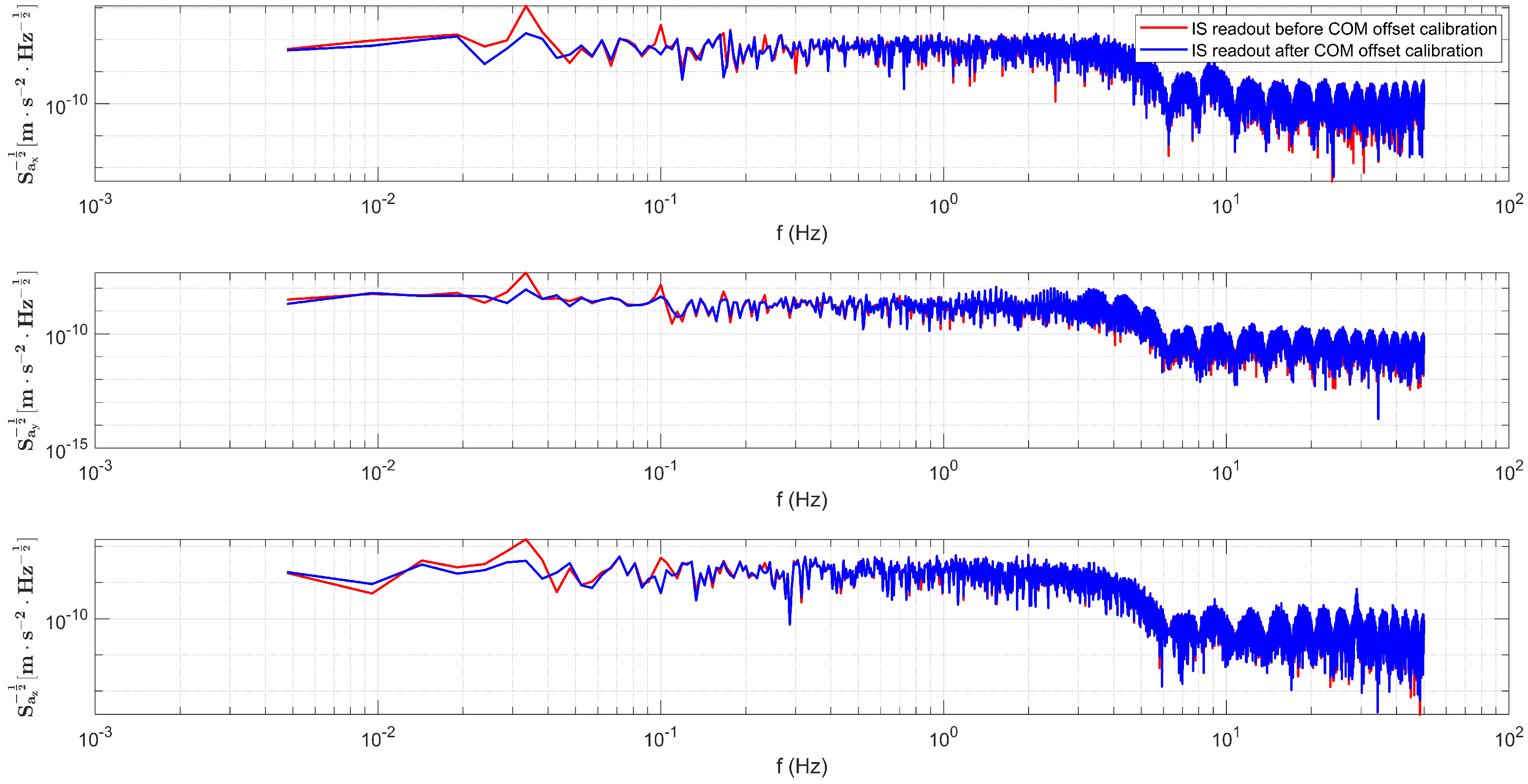
For the COM offset calibrations, one notices that according to Equations (2) and (3), the periodic swing of the spacecraft will also couple to the COM offset and produce periodic linear accelerations along the axes that are perpendicular to the rotation axis due to inertial effects, see again
Figure 4. According to
Table 3, one can then use the common mode readouts of the actuation voltages of each axis instead of the differential mode used in the scale factor calibrations, together with the spacecraft attitude data by the star trackers or the IS readouts itself to fit and calibrate the COM offset vector. This method was carefully studied and employed by the GRACE and GRACE-FO team [
2,
20,
33,
34]. However, one notices that possible interference may come from the gravity gradient signals because the spacecraft attitude variations would also produce periodic projections of the local gravity tidal force with the same frequency. This, on the contrary, forces us to choose satellite maneuvers with small magnitude of attitude variations. In fact, for Taiji-1 and GRACE-type missions, the magnitudes of gravity gradients ∼
. Therefore, according to Equation (2), for COM offset ≲
m, attitude variations
∼
will give rise to interference signals ≲
, which could be safely ignored. However, to obtain larger calibration signals with small magnitude of attitude variations, one is then forced to swing the spacecraft with high frequencies that increases the magnitude of the last term
in Equation (2). If the above considerations are satisfied, the remaining interference from the gravity gradients together with no-gravitational disturbances can be treated as a linear term due to the orbit evolutions and be filtered and removed in data processing.
For clarity, based on Equation (3) one can rewrite the observation equations for the COM calibration as
where
Here,
are the linear terms from the non-gravitational accelerations acting on the spacecraft and the gravity tidal accelerations coupled to the TM. Given the swing maneuvers discussed above, the COM offset vector
could then be fitted.
To summarize, we suggest calibration of the IS scale factors and COM offset with one round swing maneuver of the Taiji-1 satellite. To enhance the signal-to-noise ratio (SNR) and reduce the possible interferences, the swing maneuver should be of a high frequency compared with the signal band of non-gravitational forces, and the swing amplitude should be small to reduce the interference signals from gravitational tidal forces. Furthermore, the time span of the maneuver should be short to ensure that the linearity of the tidal force model remains sufficiently accurate. Finally, the attitude maneuvers should not be driven by thrusters, because the misalignment of the thrusters could produce large interference signals in linear accelerations in addition to the disturbances caused by propulsion. With these considerations, the maneuvers conducted by Taiji-1 were swings of the satellite driven by the magnetic torquers along a certain axis with a period of about 25∼30 s and a total time span of s. To enlarge the angular acceleration, we operated the magnetic torquers at their full powers, and the wave-trains of the satellite angular velocity were triangular waves with magnitudes of about . The swing maneuvers were conducted on 18 May 2022, and data processing and fitting are discussed in the next section.
3.2. Principle of IS Bias Calibration
From a physical point of view, the intrinsic bias in the actuation acceleration measurements in Equation (5) mainly comes from the asymmetry of the electrodes on the opposite sides of the same axis and the imperfection in FEE unit. The imbalance of mass distributions surrounding the IS system, couplings between the TM and residual magnetic field, etc., may also contribute to the intrinsic bias accelerations. Therefore, the intrinsic bias along each axis is stable, and its changes could be ignored in short time measurements. On the contrary, the projections of the DC or very-low-frequency non-gravitational forces along each axis change not only with the orbit positions but also with the attitude of the satellite.
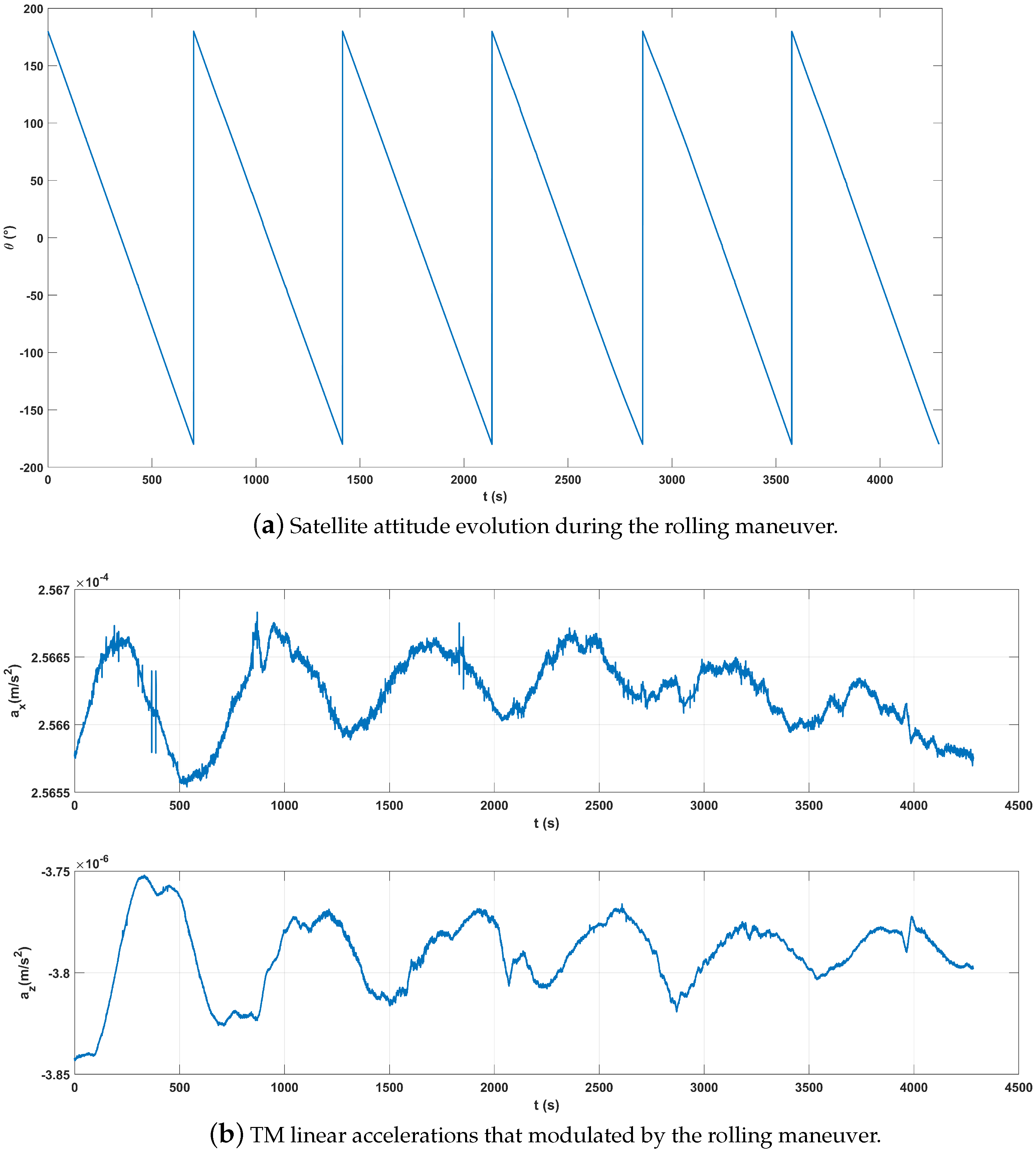
Generally, the long-term energy loss due to orbital decays based on the POD data and the work performed by the drag forces evaluated by the IS data need to be balanced, which gives us a method to determine the intrinsic biases; however, such a calibration method requires rather long-term and continuous observations and precise data from Earth geopotentials as inputs. For related missions, to avoid these technical difficulties and to make use of the IS data in time, we suggest here to roll the satellite to allow a quick calibration of the intrinsic biases with only the in-orbit measurements as inputs.
According to Equations (3) and (4), for the rolling maneuver, we rewrite the actuation acceleration measurements as
Here,
with
denotes the components of the non-gravitational accelerations exerted by the satellite in the orbit coordinates system.
is the angle between the
ith axis of the IS system and the
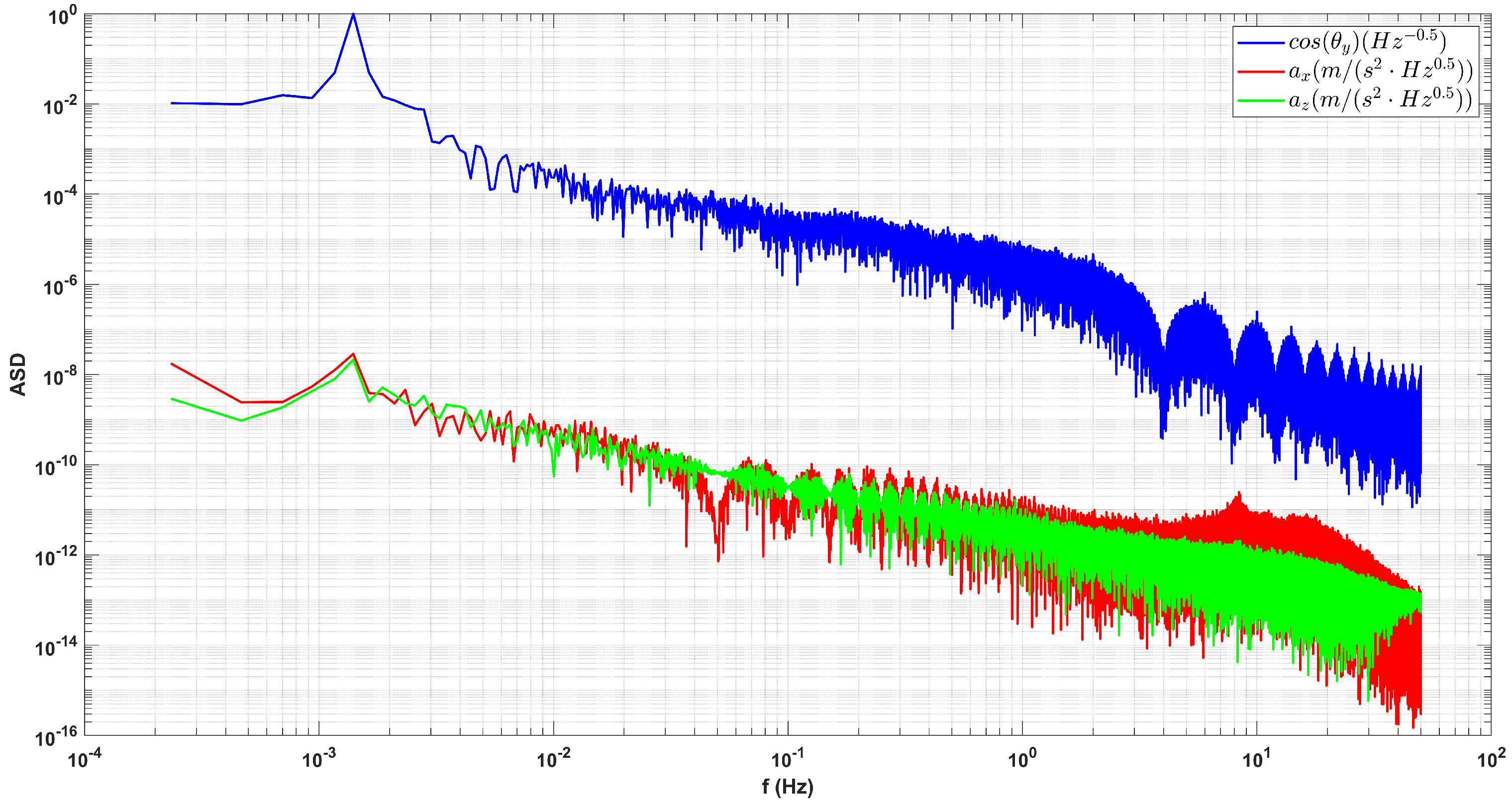
Jth axis of the orbit coordinates system. This rolling modulation will separate the DC and low-frequency non-gravitational forces from the intrinsic biases of the IS in the linear acceleration measurements and could be subtracted or averaged out from the data to suppress their effects on bias estimations.
For practical use, this method benefits when the maneuver time span for each estimation was short, that for short orbital arcs the non-gravitational forces could be treated as varies linearly with time,
The input data sets include the angles
, which can be derived by the POD data from GPS or Beidou system and the satellite attitude data from the star trackers, the actuation voltages that are readout by the FEE unit of the IS, the scale factors, and the calibrated COM offset.
The periodic terms on the right-hand side of Equation (14) can be fitted and subtracted from the IS actuation accelerations. Generally, with the in-orbit center of mass adjustment for the satellite platform, the COM offset term could then be ignored in the data fits. If not, the term could also be modeled with the above input data and subtracted from the IS readouts. Then, the biases can be estimated based on the above observation Equation (14). For Taiji-1, to fulfill the requirement discussed above, the rolling period of the satellite was about 724 s, and to test the effectiveness of this method and also to accumulate data segments with better qualities, the entire time span of the rolling maneuver was s.
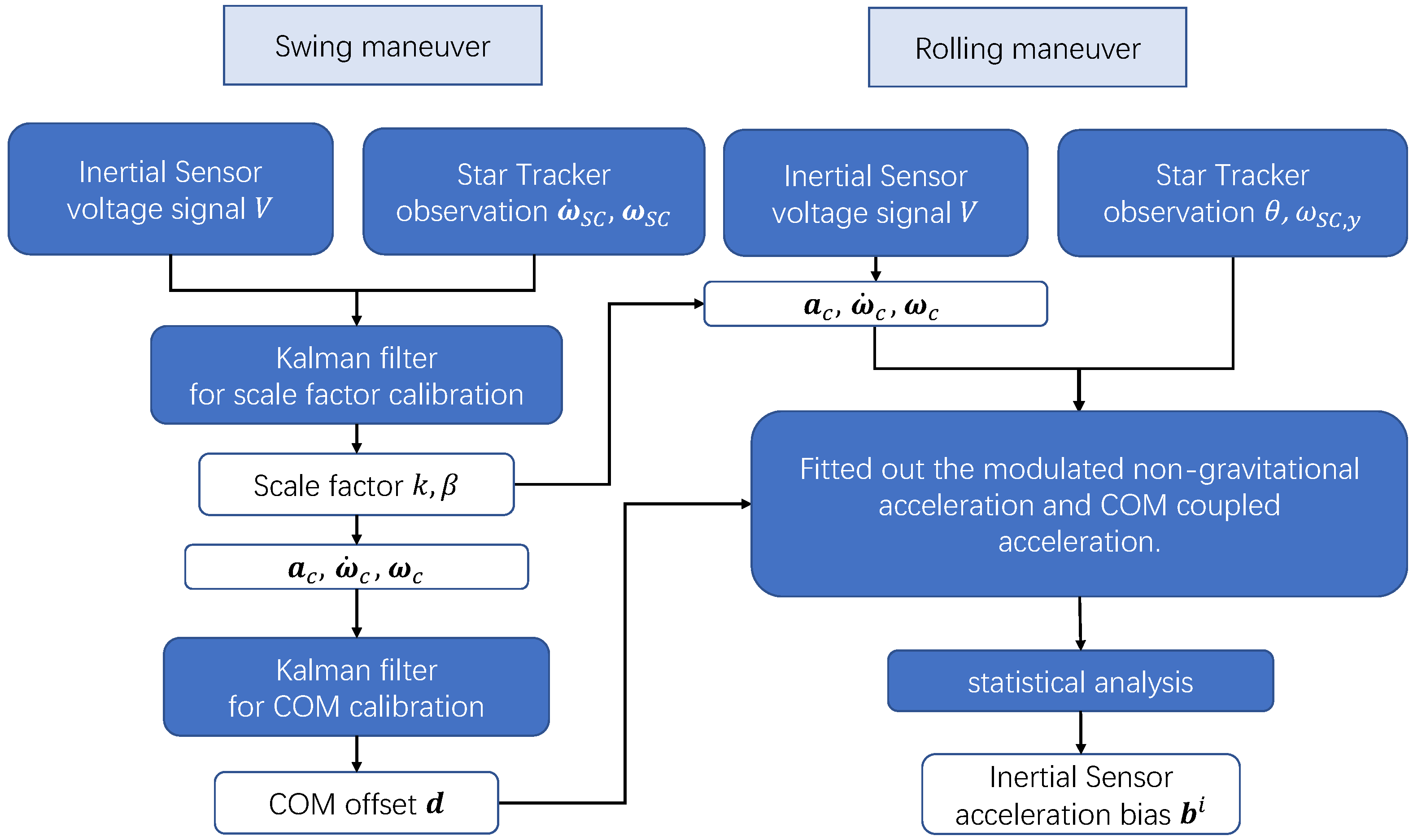
To conclude this section, the complete calibration process of the scale factors, COM offset and IS biases is summarized in
Figure 5.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}