



Canopy-Height and Stand-Age Estimation in Northeast China at Sub-Compartment Level Using Multi-Resource Remote Sensing Data


Abstract
:
1. Introduction
- (1)
- Establish the growth curves of broad-leaved, coniferous, and mixed forests, using the canopy height and stand age;
- (2)
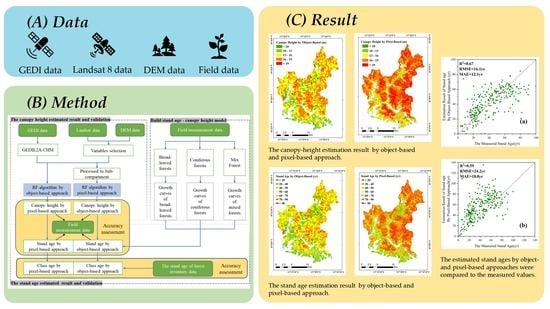
- The generation of canopy-height maps from GEDI- and Landsat-extracted parameters;
- (3)
- Extract the remote sensing parameters according to object-based and pixel-based approaches;
- (4)
- Estimate stand age according to the canopy height and growth curves generated by the two approaches;
- (5)
- Compare the accuracy of the approaches for estimating stand age and canopy height.
2. Study Area and Remote Sensing Data
2.1. Study Area
2.2. Remote Sensing Data and Pre-Processing
2.2.1. GEDI Data
2.2.2. Landsat 8 Data
2.2.3. Field Data
2.2.4. DEM Data
3. Methodology
3.1. Canopy-Height–Stand-Age Modeling
3.2. Variable Selection for Canopy-Height Estimation from Remote Sensing Data
3.3. Random Forest Algorithm for Canopy-Height Modeling
3.4. Object-Based/Pixel-Based Canopy-Height Estimation
3.5. Validation
4. Results
4.1. Fitting the Growth Curve between Stand Age and Canopy Height
4.2. Object-Based and Pixel-Based Canopy-Height Modeling Result and Accuracy Assessment
4.3. Stand-Age-Estimation Results
5. Discussion
5.1. Evaluation of the Stand-Age Estimation
5.2. Comparison of Stand-Age Estimation at Pixel Scale and Sub-Compartment Scale
5.3. Uncertainty of Forest-Stand-Age Estimation
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Bonan, G.B. Forests and Climate Change: Forcings, Feedbacks, and the Climate Benefits of Forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, X.; Zhao, X.; Bai, Y.; Tang, Z.; Wang, W.; Zhao, Y.; Wan, H.; Xie, Z.; Shi, X.; Wu, B. Carbon pools in China’s terrestrial ecosystems: New estimates based on an intensive field survey. Proc. Natl. Acad. Sci. USA 2018, 115, 4021–4026. [Google Scholar] [CrossRef] [Green Version]
- Jing, M.C. Carbon neutrality: Toward a sustainable future. Innovation 2021, 2, 1–2. [Google Scholar] [CrossRef]
- Brockerhoff, E.G.; Jactel, H.; Parrotta, J.A.; Ferraz, S.F.B. Role of eucalypt and other planted forests in biodiversity conservation and the provision of biodiversity-related ecosystem services. For. Ecol. Manag. 2013, 301, 43–50. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, J.M.; Birdsey, R.; McCullough, K.; He, L.; Deng, F. Age structure and disturbance legacy of North American forests. Biogeosciences 2011, 8, 715–732. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Shi, P.; Jia, G.; Dai, Y.; Zhao, X.; Shangguan, W.; Du, L.; Wu, H.; Luo, Y. Age-dependent forest carbon sink: Estimation via inverse modeling. J. Geophys. Res. Biogeosci. 2015, 120, 2473–2492. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Li, M.; Fan, W.; Yu, Y.; Chen, J.M. Relationship between Net Primary Productivity and Forest Stand Age under Different Site Conditions and Its Implications for Regional Carbon Cycle Study. Forests 2018, 9, 5. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Wang, C.; Yu, G. Spatio-temporal patterns of forest carbon dioxide exchange based on global eddy covariance measurements. Sci. China Ser. D 2008, 51, 1129–1143. [Google Scholar] [CrossRef]
- Koedsin, W.; Huete, A. Mapping rubber tree stand age using Pléiades Satellite Imagery: A case study in Talang district, Phuket, Thailand. Eng. J. 2015, 19, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Metsaranta, J.M. Dendrochronological procedures improve the precision and accuracy of tree and stand age estimates in the western Canadian boreal forest. For. Ecol. Manag. 2020, 457, 117657. [Google Scholar] [CrossRef]
- Bolton, D.K.; Tompalski, P.; Coops, N.C.; White, J.C.; Wulder, M.A.; Hermosilla, T.; Queinnec, M.; Luther, J.E.; van Lier, O.R.; Fournier, R.A.; et al. Optimizing Landsat time series length for regional mapping of lidar-derived forest structure. Remote Sens. Environ. 2020, 239, 111645. [Google Scholar] [CrossRef]
- Burns, P.; Clark, M.; Salas, L.; Hancock, S.; Leland, D.; Jantz, P.; Dubayah, R.; Goetz, S.J. Incorporating canopy structure from simulated GEDI lidar into bird species distribution models. Environ. Res. Lett. 2020, 15, 095002. [Google Scholar] [CrossRef]
- Lechner, A.M.; Foody, G.M.; Boyd, D.S. Applications in remote sensing to forest ecology and management. One Earth 2020, 2, 405–412. [Google Scholar] [CrossRef]
- Zhang, C.; Ju, W.; Chen, J.M.; Li, D.; Wang, X.; Fan, W.; Li, M.; Zan, M. Mapping forest stand age in China using remotely sensed forest height and observation data. J. Geophys. Res. Biogeosci. 2014, 119, 1163–1179. [Google Scholar] [CrossRef]
- Zhong, L.; Chen, Y.; Wang, X. Forest disturbance monitoring based on time series of Landsat data. Sci. Silvae Sin. 2020, 56, 80–88. [Google Scholar]
- Pflugmacher, D.; Cohen, W.B.; Kennedy, R.E.; Yang, Z. Using Landsat-derived disturbance and recovery history and lidar to map forest biomass dynamics. Remote Sens. Environ. 2014, 151, 124–137. [Google Scholar] [CrossRef]
- Vastaranta, M.; Niemi, M.; Wulder, M.A.; White, J.C.; Nurminen, K.; Litkey, P.; Honkavaara, E.; Holopainen, M.; Hyyppä, J. Forest stand age classification using time series of photogrammetrically derived digital surface models. Scand. J. For. Res. 2016, 31, 194–205. [Google Scholar] [CrossRef]
- Chen, G.; Thill, J.-C.; Anantsuksomsri, S.; Tontisirin, N.; Tao, R. Stand age estimation of rubber (Hevea brasiliensis) plantations using an integrated pixel-and object-based tree growth model and annual Landsat time series. ISPRS J. Photogramm. Remote Sens. 2018, 144, 94–104. [Google Scholar] [CrossRef]
- Huang, C.; Goward, S.N.; Masek, J.G.; Thomas, N.; Zhu, Z.; Vogelmann, J.E. An automated approach for reconstructing recent forest disturbance history using dense Landsat time series stacks. Remote Sens. Environ. 2010, 114, 183–198. [Google Scholar]
- Zhou, X.; Hao, Y.; Di, L.; Wang, X.; Chen, C.; Chen, Y.; Nagy, G.; Jancso, T. Improving GEDI Forest Canopy Height Products by Considering the Stand Age Factor Derived from Time-Series Remote Sensing Images: A Case Study in Fujian, China. Remote Sens. 2023, 15, 467. [Google Scholar] [CrossRef]
- Yang, X.; Liu, Y.; Wu, Z.; Yu, Y.; Li, F.; Fan, W. Forest age mapping based on multiple-resource remote sensing data. Environ. Monit. Assess. 2020, 192, 734. [Google Scholar] [CrossRef]
- Racine, E.B.; Coops, N.C.; St-Onge, B.; Bégin, J. Estimating forest stand age from LiDAR-derived predictors and nearest neighbor imputation. For. Sci. 2014, 60, 128–136. [Google Scholar] [CrossRef]
- Ung, C.-H.; Bernier, P.Y.; Raulier, F.; Fournier, R.A.; Lambert, M.-C.; Régnière, J. Biophysical site indices for shade tolerant and intolerant boreal species. For. Sci. 2001, 47, 83–95. [Google Scholar]
- Schumacher, J.; Hauglin, M.; Astrup, R.; Breidenbach, J. Mapping forest age using National Forest Inventory, airborne laser scanning, and Sentinel-2 data. For. Ecosyst. 2020, 7, 60. [Google Scholar] [CrossRef]
- Liu, X.; Su, Y.; Hu, T.; Yang, Q.; Liu, B.; Deng, Y.; Tang, H.; Tang, Z.; Fang, J.; Guo, Q. Neural network guided interpolation for mapping canopy height of China’s forests by integrating GEDI and ICESat-2 data. Remote Sens. Environ. 2022, 269, 112844. [Google Scholar] [CrossRef]
- Sothe, C.; Gonsamo, A.; Lourenço, R.B.; Kurz, W.A.; Snider, J. Spatially Continuous Mapping of Forest Canopy Height in Canada by Combining GEDI and ICESat-2 with PALSAR and Sentinel. Remote Sens. 2022, 14, 5158. [Google Scholar] [CrossRef]
- Chen, D.; Loboda, T.V.; Krylov, A.; Potapov, P.V. Mapping stand age dynamics of the Siberian larch forests from recent Landsat observations. Remote Sens. Environ. 2016, 187, 320–331. [Google Scholar] [CrossRef]
- Boudreau, J.; Nelson, R.F.; Margolis, H.A.; Beaudoin, A.; Guindon, L.; Kimes, D.S. Regional aboveground forest biomass using airborne and spaceborne LiDAR in Québec. Remote Sens. Environ. 2008, 112, 3876–3890. [Google Scholar] [CrossRef]
- Reyes-Palomeque, G.; Dupuy, J.M.; Portillo-Quintero, C.A.; Andrade, J.L.; Tun-Dzul, F.J.; Hernández-Stefanoni, J.L. Mapping forest age and characterizing vegetation structure and species composition in tropical dry forests. Ecol. Indic. 2021, 120, 106955. [Google Scholar] [CrossRef]
- Ye, S.; Zhu, Z.; Cao, G. Object-based continuous monitoring of land disturbances from dense Landsat time series. Remote Sens. Environ. 2023, 287, 113462. [Google Scholar] [CrossRef]
- Hang, X. Forest Management; China Forestry Publishing House: Beijing, China, 2011; Volume 61, pp. 2064–2074. [Google Scholar]
- Wang, C. Biomass allometric equations for 10 co-occurring tree species in Chinese temperate forests. For. Ecol. Manag. 2006, 222, 9–16. [Google Scholar] [CrossRef]
- Masinda, M.M.; Li, F.; Liu, Q.; Sun, L.; Hu, T. Prediction model of moisture content of dead fine fuel in forest plantations on Maoer Mountain, Northeast China. J. For. Res. 2021, 32, 2023–2035. [Google Scholar] [CrossRef]
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S. The Global Ecosystem Dynamics Investigation: High-resolution laser ranging of the Earth’s forests and topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar]
- Chen, L.; Ren, C.; Zhang, B.; Wang, Z.; Liu, M.; Man, W.; Liu, J. Improved estimation of forest stand volume by the integration of GEDI LiDAR data and multi-sensor imagery in the Changbai Mountains Mixed forests Ecoregion (CMMFE), northeast China. Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102326. [Google Scholar]
- Duncanson, L.; Kellner, J.R.; Armston, J.; Dubayah, R.; Minor, D.M.; Hancock, S.; Healey, S.P.; Patterson, P.L.; Saarela, S.; Marselis, S. Aboveground biomass density models for NASA’s Global Ecosystem Dynamics Investigation (GEDI) lidar mission. Remote Sens. Environ. 2022, 270, 112845. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar]
- Adrah, E.; Wan Mohd Jaafar, W.S.; Omar, H.; Bajaj, S.; Leite, R.V.; Mazlan, S.M.; Silva, C.A.; Chel Gee Ooi, M.; Mohd Said, M.N.; Abdul Maulud, K.N.; et al. Analyzing Canopy Height Patterns and Environmental Landscape Drivers in Tropical Forests Using NASA’s GEDI Spaceborne LiDAR. Remote Sens. 2022, 14, 3172. [Google Scholar] [CrossRef]
- Potapov, P.; Li, X.; Hernandez-Serna, A.; Tyukavina, A.; Hansen, M.C.; Kommareddy, A.; Pickens, A.; Turubanova, S.; Tang, H.; Silva, C.E.; et al. Mapping global forest canopy height through integration of GEDI and Landsat data. Remote Sens. Environ. 2021, 253, 112165. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Lao, J.; Li, D. Consistency analysis of forest height retrievals between GEDI and ICESat-2. Remote Sens. Environ. 2022, 281, 113244. [Google Scholar] [CrossRef]
- López-Serrano, P.M.; Cárdenas Domínguez, J.L.; Corral-Rivas, J.J.; Jiménez, E.; López-Sánchez, C.A.; Vega-Nieva, D.J. Modeling of aboveground biomass with Landsat 8 OLI and machine learning in temperate forests. Forests 2019, 11, 11. [Google Scholar] [CrossRef] [Green Version]
- Li, F.R.; Wang, H.Z.; Jia, W.W.; Liu, Z.G. Remote Sensing Image Segmentation of Ulan Buh Desert Based on Mathematical Morphology. Adv. Mater. Res. 2011, 268, 1332–1338. [Google Scholar]
- Von Gadow, K.; Hui, G. Modelling Forest Development; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1998; Volume 57. [Google Scholar]
- Xi, Z.; Xu, H.; Xing, Y.; Gong, W.; Chen, G.; Yang, S. Forest Canopy Height Mapping by Synergizing ICESat-2, Sentinel-1, Sentinel-2 and Topographic Information Based on Machine Learning Methods. Remote Sens. 2022, 14, 364. [Google Scholar] [CrossRef]
- Yu, Y.; Pan, Y.; Yang, X.; Fan, W. Spatial Scale Effect and Correction of Forest Aboveground Biomass Estimation Using Remote Sensing. Remote Sens. 2022, 14, 2828. [Google Scholar] [CrossRef]
- Wang, F.; Yang, M.; Ma, L.; Zhang, T.; Qin, W.; Li, W.; Zhang, Y.; Sun, Z.; Wang, Z.; Li, F. Estimation of above-ground biomass of winter wheat based on consumer-grade multi-spectral UAV. Remote Sens. 2022, 14, 1251. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Spracklen, B.; Spracklen, D.V. Synergistic Use of Sentinel-1 and Sentinel-2 to Map Natural Forest and Acacia Plantation and Stand Ages in North-Central Vietnam. Remote Sens. 2021, 13, 185. [Google Scholar] [CrossRef]
- Chen, C.; Wang, K.; Fang, L.; Grogan, J.; Talmage, C.; Weng, Y. Landsat Data Based Prediction of Loblolly Pine Plantation Attributes in Western Gulf Region, USA. Remote Sens. 2022, 14, 4702. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Yang, X.; He, P.; Yu, Y.; Fan, W. Stand Canopy Closure Estimation in Planted Forests Using a Geometric-Optical Model Based on Remote Sensing. Remote Sens. 2022, 14, 1983. [Google Scholar] [CrossRef]
- LY/T 2908-2017; Regulations for Age-Class and Age-Group Division of Main Tree-Species. Standards Press of China: Beijing, China, 2017; pp. 1–16.
- Fujiki, S.; Okada, K.; Nishio, S.; Kitayama, K. Estimation of the stand ages of tropical secondary forests after shifting cultivation based on the combination of WorldView-2 and time-series Landsat images. ISPRS J. Photogramm. Remote Sens. 2016, 119, 280–293. [Google Scholar] [CrossRef]
- Li, D.; Ju, W.; Fan, W.; Gu, Z. Estimating the age of deciduous forests in northeast China with Enhanced Thematic Mapper Plus data acquired in different phenological seasons. J. Appl. Remote Sens. 2014, 8, 083670. [Google Scholar] [CrossRef] [Green Version]
- Besnard, S.; Koirala, S.; Santoro, M.; Weber, U.; Nelson, J.; Gütter, J.; Herault, B.; Kassi, J.; N’Guessan, A.; Neigh, C.; et al. Mapping global forest age from forest inventories, biomass and climate data. Earth Syst. Sci. Data 2021, 13, 4881–4896. [Google Scholar] [CrossRef]
- Maltman, J.C.; Hermosilla, T.; Wulder, M.A.; Coops, N.C.; White, J.C. Estimating and mapping forest age across Canada’s forested ecosystems. Remote Sens. Environ. 2023, 290, 113529. [Google Scholar] [CrossRef]
- Zhai, D.; Dong, J.; Cadisch, G.; Wang, M.; Kou, W.; Xu, J.; Xiao, X.; Abbas, S. Comparison of pixel-and object-based approaches in phenology-based rubber plantation mapping in fragmented landscapes. Remote Sens. 2017, 10, 44. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Manley, B.; Morgenroth, J. Evaluation of modelling approaches in predicting forest volume and stand age for small-scale plantation forests in New Zealand with RapidEye and LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 386–396. [Google Scholar] [CrossRef]
- Lv, Y.; Han, N.; Du, H. Estimation of Bamboo Forest Aboveground Carbon Using the RGLM Model Based on Object-Based Multiscale Segmentation of SPOT-6 Imagery. Remote Sens. 2023, 15, 2566. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Type | No. of Plots | Stand Age (yr) | Canopy Height (m) | ||||
|---|---|---|---|---|---|---|---|
| Max. | Min. | Mean | Max. | Min. | Mean | ||
| Broad-leaved forests | 177 | 100 | 6 | 51.5 | 20.92 | 4.30 | 14.59 |
| Coniferous forests | 65 | 54 | 10 | 24.1 | 16.95 | 3.42 | 9.36 |
| Mixed forests | 27 | 48 | 3 | 26.8 | 18.64 | 5.01 | 12.97 |
| Type | Model | Formula |
|---|---|---|
| Base model | Logistic | H = a/ (1 + b exp (c t)) |
| Dummy model | M1 (F is added to the first parameter) | t = ((b1 + b2 × X1 + b3 × X2) − LN (a/H − 1))/c |
| M2 (F is added to the second parameter) | t = (b − LN ((a1 − a2 × X1 − a3 × X2)/H − 1))/c | |
| M3 (F is added to the third parameter) | t = (b − LN (a/H − 1))/(c1 − c2 × X1 − c3 × X2) |
| Variable | Formular | Description |
|---|---|---|
| ND563 [45] | (B5 + B6 − B3) × (B5 + B6 + B3) | normalized difference vegetation index |
| ND25 | (B5 − B2) × (B5 + B2) | normalized difference vegetation index |
| B3 | Green, 525 nm–600 nm | reflectance of the Landsat-8 green light band |
| ME3 | mean of the four directional textural features of Landsat-8 band 3 | |
| EVI | 2.5 × (B5 − B4)/(B5 + 6.0 × B4 − 7.5 × B2 + 1) | enhanced Vegetation Index |
| Wetness | 0.1509 × B2 + 0.1973 × B3 + 0.3279 × B4 + 0.3406 × B5 − 0.7112 × B6 − 0.4572 × B7 | Tasseled Cap (KT) transformation wetness |
| Cor4 | the correlation texture between the grey levels and those neighboring pixels of band 4 | |
| Slope | - | slope extracted from DEM data |
| Model | Type | Function | R2 | RMSE |
|---|---|---|---|---|
| H = f(t) | Broad-leaved forests | H = 17.87/(1 + exp(−0.06288 × t + 1.241))) | 0.82 | 2.77 m |
| Coniferous forests | H = 13.84/(1 + exp(−0.1183 × t + 1.952))) | 0.73 | 2.32 m | |
| Mix forests | H = 18.27/(1 + exp(−0.01845 × t + 1.023))) | 0.80 | 3.21 m | |
| t = f(H) | Broad-leaved forests | t = (1.351 − LN (23.81/H − 1))/0.03680 | 0.77 | 9.7 yr |
| Coniferous forests | t = (2.445 − LN (18.61/H − 1))/0.1032 | 0.64 | 7.5 yr | |
| Mix forests | t = (1.396 − LN (21.33/H − 1))/0.07692 | 0.78 | 8.4 yr |
| Model | Function | R2 | RMSE (yr) |
|---|---|---|---|
| M1 | t = ((0.8761 + 0.7982 × X1 + 0.5854 × X2) − LN (22.21/H − 1))/0.04621 | 0.82 | 9.2 |
| M2 | t = (1.604 − LN ((31.87 − 9.572 × X1 − 6.586 × X2)/H − 1))/0.04568 | 0.81 | 9.1 |
| M3 | t = (1.549 − LN (22.69/H − 1))/(0.06827 − 0.02691 × X1 − 0.01756 × X2) | 0.83 | 8.8 |
| Approach | No. of Samples | Set | R2 | RMSE (m) |
|---|---|---|---|---|
| Object-based | 1636 | Training set | 0.68 | 2.61 |
| Test set | 0.57 | 2.87 | ||
| Pixel-based | 6878 | Training set | 0.59 | 3.34 |
| Test set | 0.51 | 3.57 |
| Type | Method | R2 | RMSE (yr) | MAE (yr) |
|---|---|---|---|---|
| Broad-leaved forests | Object-Based | 0.53 | 16.6 | 13.5 |
| Pixel-Based | 0.44 | 24.0 | 25.4 | |
| Coniferous forests | Object-Based | 0.81 | 10.2 | 8.6 |
| Pixel-Based | 0.68 | 23.4 | 26.9 | |
| Mixed forests | Object-Based | 0.66 | 10.4 | 8.8 |
| Pixel-Based | 0.89 | 6.6 | 7.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, X.; Yang, X.; Yu, Y.; Pan, Y.; Dong, H.; Yang, T. Canopy-Height and Stand-Age Estimation in Northeast China at Sub-Compartment Level Using Multi-Resource Remote Sensing Data. Remote Sens. 2023, 15, 3738. https://doi.org/10.3390/rs15153738
Guan X, Yang X, Yu Y, Pan Y, Dong H, Yang T. Canopy-Height and Stand-Age Estimation in Northeast China at Sub-Compartment Level Using Multi-Resource Remote Sensing Data. Remote Sensing. 2023; 15(15):3738. https://doi.org/10.3390/rs15153738
Chicago/Turabian StyleGuan, Xuebing, Xiguang Yang, Ying Yu, Yan Pan, Hanyuan Dong, and Tao Yang. 2023. "Canopy-Height and Stand-Age Estimation in Northeast China at Sub-Compartment Level Using Multi-Resource Remote Sensing Data" Remote Sensing 15, no. 15: 3738. https://doi.org/10.3390/rs15153738