

An Hybrid Integration Method-Based Track-before-Detect for High-Speed and High-Maneuvering Targets in Ubiquitous Radar

Abstract
:1. Introduction
2. Keystone-Transform and Matched Filter Processing
3. Improved Particle Filter
3.1. The Target Motion Model
3.2. Observation Model
3.3. Filter Derivation
3.4. Implementation of Improved Particle Filter
| Algorithm 1 Systematic Resampling Pseudo-code. |
|
- Based on (48), generate newborn particles and continuing particles.where i and j represent the index of newborn and continuing particles, respectively. For the continuing particles, the target state-transition function can be obtained from (25). For the newborn particles, a uniform distribution can be used.
- Calculate the weights of the particles and normalize them. For the newborn particles:For the continuing particles:
- Calculate .We can use the Monte Carlo sampling method to calculate the integral, and the value is
- Calculate in (37). For , define continuing mixing term.And for , the newborn mixing term isThen can be calculatedand
- Calculate the probability of existence, in (43).First, from (45), we can obtain
- Calculate the posterior target state density from (35).Combine the newborn particles set and the continuing particles set into a large set as follows:
- Resample particles down to the particles set, .
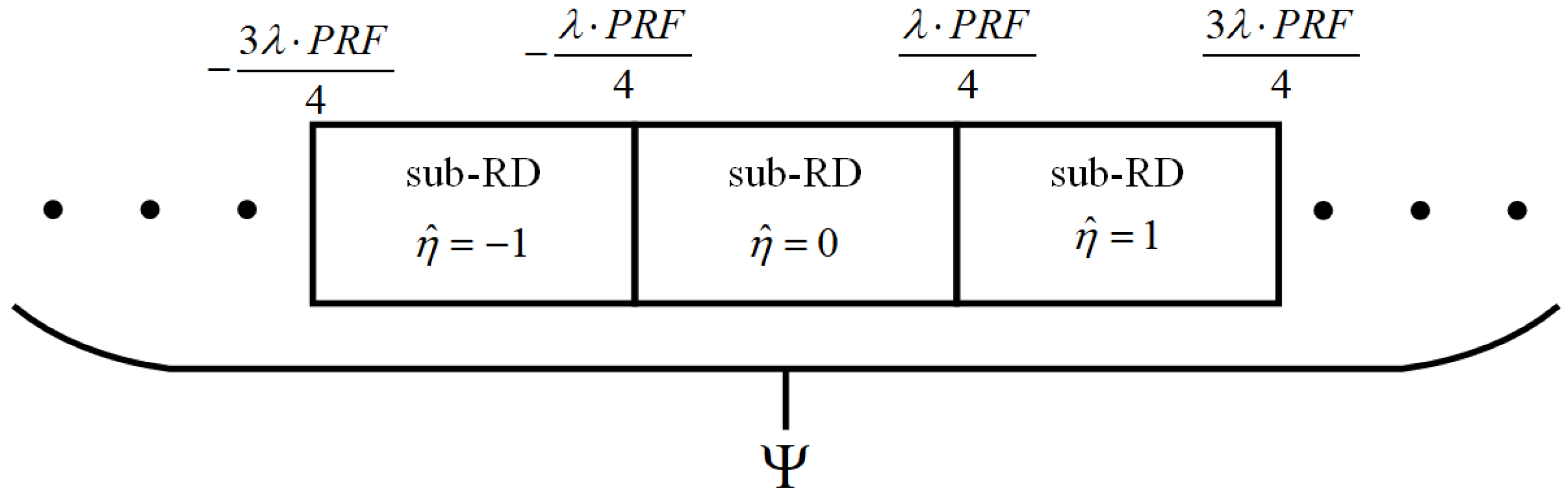
- First, Estimate the ambiguity number of the target.where is the logical operation, when it equal to logic 1, in contrast, equal to logic 0. is the velocity of a particle with index i and & is the logic AND operation.Then estimate the other motion state:
4. Simulations and Results
4.1. Design of the Simulation System
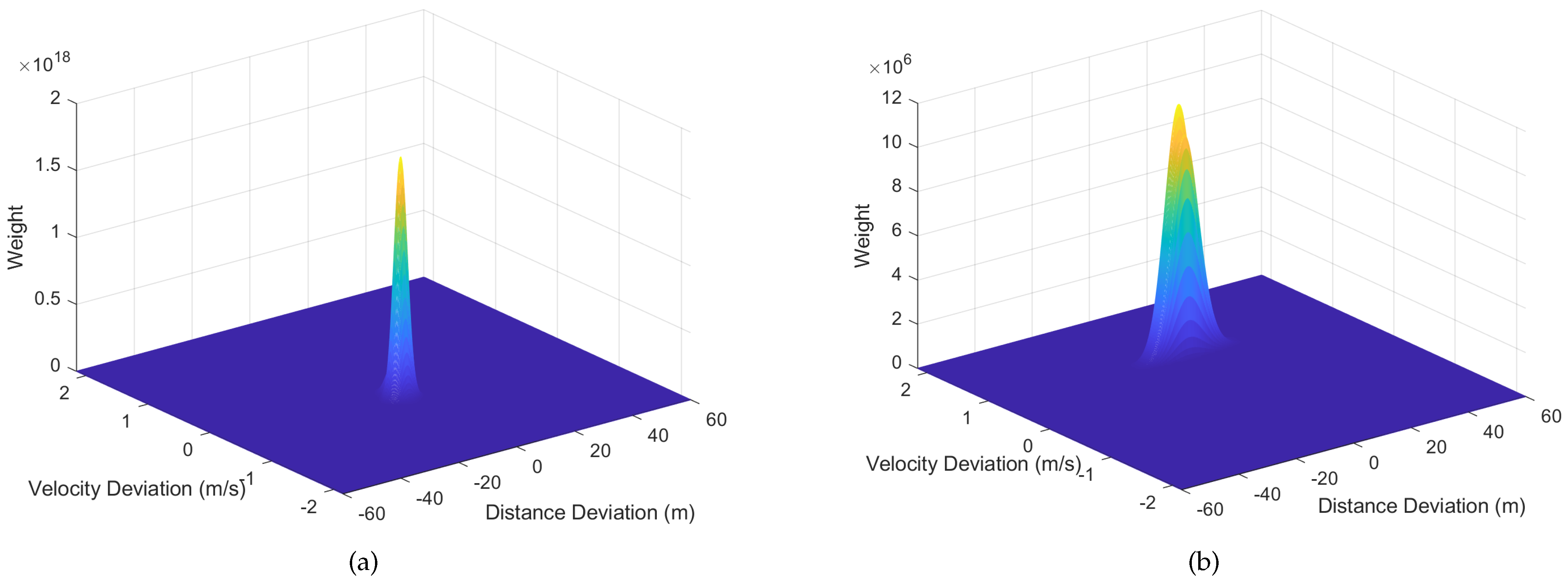
4.2. Integration Efficiency Analysis
4.3. Ubiquitous Radar Actual Data Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, Q.; Chen, J.; Wu, H.; Zhang, Y.; Chen, Z. Experimental Study on Micro-Doppler Effect and Micro-Motion Characteristics of aerial targets based on holographic staring Radar. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 1 May 2019; pp. 1186–1190. [Google Scholar]
- Dorsey, W.M.; Scholnik, D.P.; Stumme, A. Performance Comparison of Planar, Cylindrical, and Polygonalized Phased Arrays for Surveillance and Ubiquitous Radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 596–602. [Google Scholar] [CrossRef]
- Wirth, W.D. Long term coherent integration for a floodlight radar. In Proceedings of the International Radar Conference, Alexandria, VA, USA, 8 May 1995; pp. 698–703. [Google Scholar]
- IEEE Std 686-2017 (Revision of IEEE Std 686-2008); IEEE Standard for Radar Definitions. IEEE: Piscateville, NJ, USA, 13 September 2017; pp. 1–54. [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.-G.; Ma, J.-T.; Ma, J. Long-Time Coherent Integration for Weak Maneuvering Target Detection and High-Order Motion Parameter Estimation Based on Keystone Transform. In Proceedings of the IEEE Transactions on Signal Processing, Chengdu, China, 6–10 November 2016; IEEE: New York, NY, USA, 1 August 2016; Volume 64, pp. 4013–4026. [Google Scholar] [CrossRef]
- Zhang, S.-s.; Zeng, T.; Long, T.; Yuan, H.-p. Dim target detection based on keystone transform. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 889–894. [Google Scholar] [CrossRef]
- Perry, R.P.; DiPietro, R.C.; Fante, R.L. Coherent Integration With Range Migration Using Keystone Formatting. In Proceedings of the 2007 IEEE Radar Conference, Waltham, MA, USA, 17–20 April 2007; pp. 863–868. [Google Scholar] [CrossRef]
- Tian, J.; Cui, W.; Wu, S. A Novel Method for Parameter Estimation of Space Moving Targets. In Proceedings of the IEEE Geoscience and Remote Sensing Letters, Quebec City, QC, Canada, 13–18 July 2014; Volume 11, pp. 389–393. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection, I: Generalized Doppler Filter Bank. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1186–1202. [Google Scholar] [CrossRef]
- Xu, J.; Yu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection (II): Blind Speed Sidelobe Suppression. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2473–2489. [Google Scholar] [CrossRef]
- Yu, J.; Xu, J.; Peng, Y.-N.; Xia, X.-G. Radon-Fourier Transform for Radar Target Detection (III): Optimality and Fast Implementations. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 991–1004. [Google Scholar] [CrossRef]
- Xu, J.; Xia, X.-G.; Peng, S.-B.; Yu, J.; Peng, Y.-N.; Qian, L.-C. Radar Maneuvering Target Motion Estimation Based on Generalized Radon-Fourier Transform. IEEE Trans. Signal Process. 2012, 60, 6190–6201. [Google Scholar] [CrossRef]
- Yao, D.; Zhang, X.; Sun, Z. Long-Time Coherent Integration for Maneuvering Target Based on Second-Order Keystone Transform and Lv’s Distribution. Electronics 2022, 11, 1961. [Google Scholar] [CrossRef]
- Yu, W.; Su, W.; Hong, G. Ground moving target motion parameter estimation using Radon modified Lv’s distribution. Digit. Signal Process. 2017, 69, 212–223. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Liu, N.; He, Y. Maneuvering Target Detection via Radon-Fractional Fourier Transform-Based Long-Time Coherent Integration. IEEE Trans. Signal Process. 2014, 62, 939–953. [Google Scholar] [CrossRef]
- Xu, J.; Zhou, X.; Qian, L.-C.; Xia, X.-G.; Long, T. Hybrid integration for highly maneuvering radar target detection based on generalized radon-fourier transform. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2554–2561. [Google Scholar] [CrossRef]
- Zhou, X.; Qian, L.; Ding, Z.; Xu, J.; Liu, W.; You, P.; Long, T. Radar Detection of Moderately Fluctuating Target Based on Optimal Hybrid Integration Detector. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2408–2425. [Google Scholar] [CrossRef]
- He, Z.; Yang, Y.; Chen, W. A Hybrid Integration Method for Moving Target Detection With GNSS-Based Passive Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 1184–1193. [Google Scholar] [CrossRef]
- Bao, Z.C.; Jiang, Q.X.; Liu, F.Z. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets. J. Syst. Eng. Electron. 2020, 31, 647–656. [Google Scholar]
- Xu, C.; He, Z.S.; Liu, H.c.; Li, Y.D. Bayesian track-before-detect algorithm for nonstationary sea clutter. J. Syst. Eng. Electron. 2021, 32, 1338–1344. [Google Scholar]
- Kim, D.Y.; Ristic, B. Guan, R.; Rosenberg, L. A Bernoulli Track-Before-Detect Filter for Interacting Targets in Maritime Radar. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1981–1991. [Google Scholar] [CrossRef]
- Lu, X.; Wang, Z.; Deng, M.; Shi, J.; He, Z.; Li, H. Track-Before-Detect Algorithm for Airborne Radar in Compound Gaussian Clutter with Inverse Gaussian Texture. In Proceedings of the 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17 July 2022; pp. 2813–2816. [Google Scholar]
- Satzoda, R.K.; Suchitra, S.; Srikanthan, T. Parallelizing the Hough Transform Computation. IEEE Signal Process Lett. 2008, 15, 297–300. [Google Scholar] [CrossRef]
- Zeng, J.K.; He, Z.S.; Sellathurai, M.; Liu, H.M. Modified Hough Transform for Searching Radar Detection. IEEE Geosci. Remote Sens. Lett. 2008, 5, 683–686. [Google Scholar]
- Lin, H.; Zeng, C.; Zhang, H.; Jiang, G. Radar Maneuvering Target Motion Parameter Estimation Based on Hough Transform and Polynomial Chirplet Transform. IEEE Access 2021, 9, 35178–35195. [Google Scholar] [CrossRef]
- Elhoshy, M.; Gebali, F.; Gulliver, T.A. Expanding Window Dynamic-Programming-Based Track-Before-Detect With Order Statistics in Weibull Distributed Clutter. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 2564–2575. [Google Scholar] [CrossRef]
- Grossi, E.; Lops, M.; Venturino, L. A Novel Dynamic Programming Algorithm for Track-Before-Detect in Radar Systems. IEEE Trans. Signal Process. 2013, 61, 2608–2619. [Google Scholar] [CrossRef]
- Yi, W.; Kong, L.; Yang, J.; Morelande, M.R. Student highlight: Dynamic programming-based track-before-detect approach to multitarget tracking. IEEE Trans. Aerosp. Electron. Syst. 2012, 27, 31–33. [Google Scholar] [CrossRef]
- Li, W.; Yi, W.; Teh, K.C.; Kong, L. Adaptive Multiframe Detection Algorithm With Range-Doppler-Azimuth Measurements. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 5119616. [Google Scholar] [CrossRef]
- Yi, W.; Fang, Z.; Li, W.; Hoseinnezhad, R.; Kong, L. Multi-Frame Track-Before-Detect Algorithm for Maneuvering Target Tracking. IEEE Trans. Veh. Technol. 2020, 69, 4104–4118. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, G. Pseudo-Spectrum Based Track-Before-Detect for Weak Maneuvering Targets in Range-Doppler Plane. IEEE Trans. Veh. Technol. 2021, 70, 3043–3058. [Google Scholar] [CrossRef]
- Garcia, F.J.I.; Mandal, P.K.; Bocquel, M.; Marques, A.G. Riemann–Langevin Particle Filtering in Track-Before-Detect. IEEE Signal Process Lett. 2018, 25, 1039–1043. [Google Scholar] [CrossRef] [Green Version]
- Úbeda-Medina, L.; García-Fernández, Á.F.; Grajal, J. Adaptive Auxiliary Particle Filter for Track-Before-Detect With Multiple Targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2317–2330. [Google Scholar] [CrossRef]
- Ito, N.; Godsill, S. A Multi-Target Track-Before-Detect Particle Filter Using Superpositional Data in Non–Gaussian Noise. IEEE Signal Process Lett. 2020, 27, 1075–1079. [Google Scholar] [CrossRef]
- Park, J. Particle filter track-before-detect application using inequality constraints. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1483–1489. [Google Scholar]
- Salmond, D.J.; Birch, H. A particle filter for track-before-detect. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001; pp. 3755–3760. [Google Scholar]
- Rutten, M.G.; Gordon, N.J.; Maskell, S. Efficient particle-based track-before-detect in Rayleigh noise. In Proceedings of the 7th Proceeding of the International Conference on Information Fusion, Sweden, Stockholm, 28 June–1 July 2004; pp. 693–700. [Google Scholar]
- Pignol, F.; Colone, F.; Martelli, T. Lagrange–Polynomial-Interpolation-Based Keystone Transform for a Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1151–1167. [Google Scholar] [CrossRef]
- Zhan, M. A Modified Keystone Transform Matched Filtering Method for Space-Moving Target Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Li, G.; Xia, X.G.; Peng, Y.N. Doppler Keystone Transform: An Approach Suitable for Parallel Implementation of SAR Moving Target Imaging. IEEE Trans. Geosci. Remote Sens. Lett. 2008, 5, 573–577. [Google Scholar] [CrossRef]
- Wang, R. Processing the Azimuth-Variant Bistatic SAR Data by Using Monostatic Imaging Algorithms Based on Two-Dimensional Principle of Stationary Phase. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3504–3520. [Google Scholar] [CrossRef]
- Mulgrew, B. The Stationary Phase Approximation, Time-Frequency Decomposition and Auditory Processing. IEEE Trans. Signal Process. 2014, 62, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Mochnac, J.; Marchevsky, S.; Kocan, P. Bayesian filtering techniques: Kalman and extended Kalman filter basics. In Proceedings of the 2009 19th International Conference Radioelektronika, Bratislava, Slovakia, 22 April 2009; pp. 119–122. [Google Scholar]
- Gross, F.B. New approximations to J/sub 0/ and J/sub 1/ Bessel functions. IEEE Trans. Antennas Propag. 1995, 43, 904–907. [Google Scholar] [CrossRef]
- Bruno, M.G.S. Sequential importance sampling filtering for target tracking in image sequences. IEEE Signal Process. Lett. 2003, 10, 246–249. [Google Scholar] [CrossRef]
- Douc, R.; Cappe, O. Comparison of resampling schemes for particle filtering. In Proceedings of the 4th International Symposium on Image and Signal Processing and Analysis, Zagreb, Croatia, 15 September 2005; pp. 64–69. [Google Scholar]
- Finn, H.M.; Johnson, R.S. Adaptive Detection Mode with Threshold Control as a Function of Spatially Sampled Clutter-Level Estimates. Rca Rev. 1968, 29, 414–463. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Pulse Repetition Frequency (PRF) | 5 kHz |
| Carrier Frequency | 1.36 GHz |
| Bandwidth | 4 MHz |
| Pulse Width | 2 us |
| Complex Sampling Frequency | 5 MHz |
| Integration Number | 2048 |
| Ambiguity Number | |
| Range of Distance | 30 km |
| Range of velocity | 827.2 m/s |
| Parameter Name | Parameter Value |
|---|---|
| Initial Radical Distance | 15 km |
| Initial Radical Velocity | −300 m/s |
| Initial Radical Acceleration | 10 m/s |
| 1 | |
| 5 |
| Method Name | Complexity (Flops) |
|---|---|
| KT-FrFT-RFT+CA-CFAR | |
| MTD-GRT+CA-CFAR | |
| KT-MFP-IPF-TBD |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Song, Q.; Zhang, Y.; Wang, W. An Hybrid Integration Method-Based Track-before-Detect for High-Speed and High-Maneuvering Targets in Ubiquitous Radar. Remote Sens. 2023, 15, 3507. https://doi.org/10.3390/rs15143507
Peng X, Song Q, Zhang Y, Wang W. An Hybrid Integration Method-Based Track-before-Detect for High-Speed and High-Maneuvering Targets in Ubiquitous Radar. Remote Sensing. 2023; 15(14):3507. https://doi.org/10.3390/rs15143507
Chicago/Turabian StylePeng, Xiangyu, Qiang Song, Yue Zhang, and Wei Wang. 2023. "An Hybrid Integration Method-Based Track-before-Detect for High-Speed and High-Maneuvering Targets in Ubiquitous Radar" Remote Sensing 15, no. 14: 3507. https://doi.org/10.3390/rs15143507