
UAV Implementations in Urban Planning and Related Sectors of Rapidly Developing Nations: A Review and Future Perspectives for Malaysia

 ,
,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Literature Review
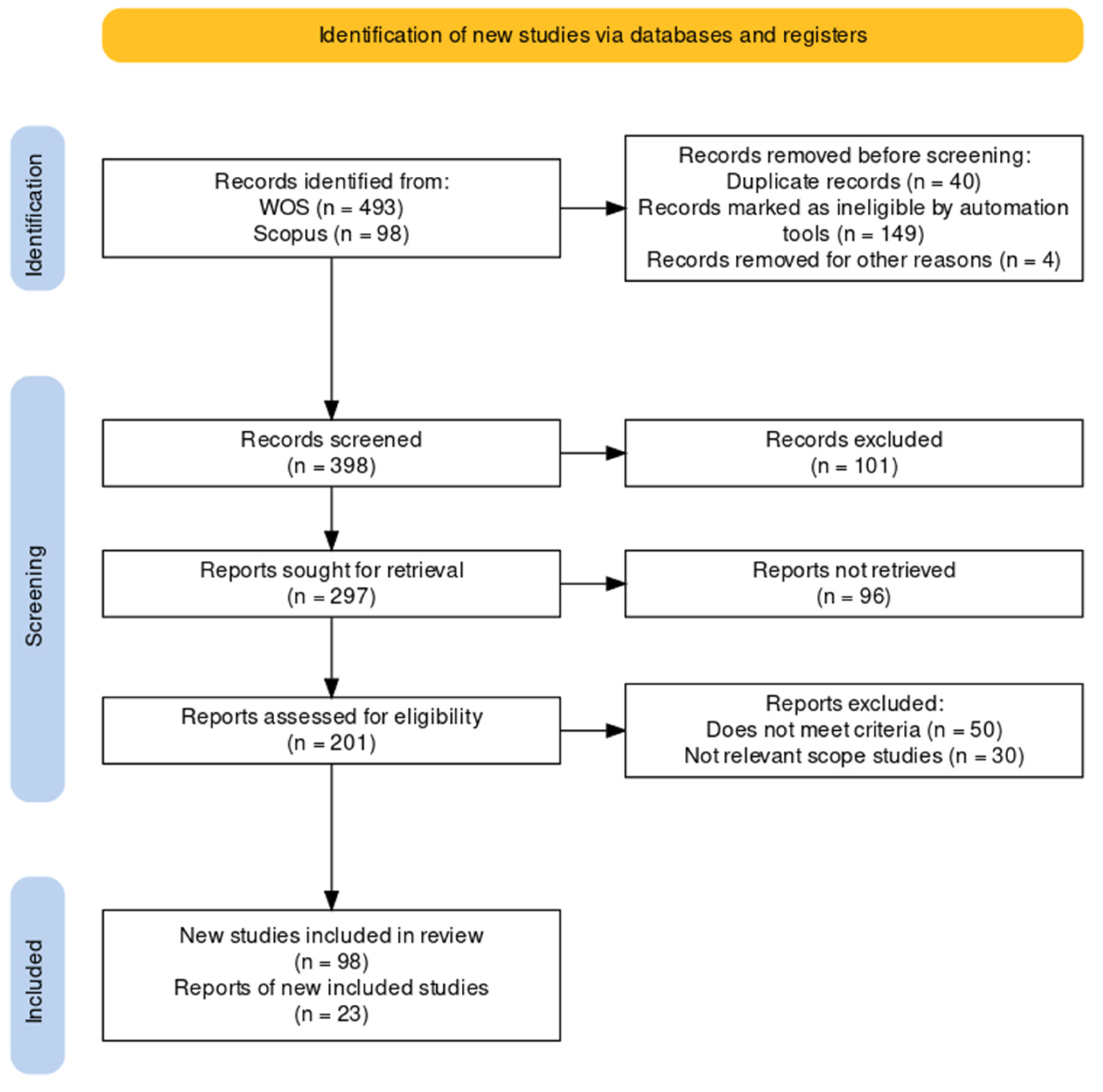
2.2. Identification Strategy
3. Eyes on the Sky: A Transforming Skyline
3.1. UAV Remote Sensing Perspective of Urban Planning
3.2. Background of UAVs
3.3. UAV Categories
3.4. UAV Data
3.5. UAV-as-a-Service Sector
3.6. Applications of UAVs
3.7. Policies, Rules, Regulations, and Limitations
4. UAVs for Urban Planning and Development
4.1. Urban Planning and Development
4.1.1. Specifications of Urban Planning
4.1.2. Current Needs and Importance
4.1.3. Urban Development Assessment
4.2. Applications of UAVs for Urban Areas
4.2.1. Aerial Mapping
4.2.2. 3D Modeling of Structures and Terrain
4.2.3. Site Inspection and Monitoring
4.2.4. Boundary Assessment and Area Estimation
4.2.5. Green Space Analysis
4.2.6. Environmental Monitoring
4.2.7. Archaeological Monument Mapping
4.2.8. Wildfire Prevention, Monitoring, and Rescue
4.2.9. Master Plan Formulation for Cities
5. Rising Urbanization and the Need for UAVs in Malaysia
5.1. Malaysia—A Land of Diverse Culture and Contrasting Landscapes
5.2. Recent Sprawl of Urbanization
5.3. Advancements in UAV Applications
5.4. UAVs for Urban Planning in Malaysia
5.5. Future Prospectives
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Steuteville, R.; Dover, V.; Dittmar, H.; Low, T.; Crabtree, P.; Burden, D.; Marshall, W.; Thadani, D.; Moule, E.; Talen, E.; et al. 25 Great Ideas of New Urbanism; Public Square: La Mesa, CA, USA, 2018; Available online: https://www.cnu.org/sites/default/files/25-great-ideas-book.pdf (accessed on 18 April 2023).
- Abdullah, S.; Abdul Rashid, M.F.; Tahar, K.N.; Osoman, M.A. Tree Crown Mapping Based on Unmanned Aerial Vehicle (UAV) Towards A Green-Sustainable Residential. J. Malays. Inst. Plan. 2021, 19, 97–107. [Google Scholar] [CrossRef]
- Esch, T.; Taubenböck, H.; Heldens, W.; Thiel, M.; Wurm, M.; Geiss, C.; Dech, S. Urban Remote Sensing-How Can Earth Observation Support the Sustainable Development of Urban Environments? In Proceedings of the Real CORP Coreference, Vienna, Austria, 18–20 May 2010; pp. 837–847. [Google Scholar]
- Ab Rahman, A.A.; Wan Mohd Jaafar, W.S.; Abdul Maulud, K.N.; Noor, N.M.; Mohan, M.; Cardil, A.; Silva, C.A.; Che’Ya, N.N.; Naba, N.I. Applications of Drones in Emerging Economies: A Case Study of Malaysia. In Proceedings of the 2019 6th International Conference on Space Science and Communication IconSpace, Johor Bahru, Malaysia, 28–30 July 2019; pp. 35–40. [Google Scholar]
- EPU. Twelfth Malaysia Plan, 2O21–2025 A Prosperous, Inclusive, Sustainable Malaysia; Economic Planning Unit, Prime Minister Department: Putrajaya, Malaysia, 2021.
- Castro, M.K.Q.; Agbisit, J.B. The ASEAN—The Road to Sustainable Cities; The ASEAN Secretariat: Jakarta, Indonesia, 2021; pp. 1–56. ISSN 2721-8058. [Google Scholar]
- Esch, T.; Heldens, W.; Hirner, A.; Keil, M.; Marconcini, M.; Roth, A.; Zeidler, J.; Dech, S.; Strano, E. Breaking New Ground in Mapping Human Settlements from Space—The Global Urban Footprint. ISPRS J. Photogramm. Remote Sens. 2017, 134, 30–42. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y.; Alsharif, M.H.; Khan, M.A. Unmanned Aerial Vehicles (UAVs): Practical Aspects, Applications, Open Challenges, Security Issues, and Future Trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the Advent of the Twenties: Where We Stand and What Is Next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar] [CrossRef]
- Nor, M.M.; Mohd Noor, N. Integrating Satellite Temporal Analysis for Urban Morphology Study in Melaka. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012028. [Google Scholar] [CrossRef]
- Hartley, R.J.L.; Leonardo, E.M.; Massam, P.; Watt, M.S.; Estarija, H.J.; Wright, L.; Melia, N.; Pearse, G.D. An Assessment of High-Density UAV Point Clouds for the Measurement of Young Forestry Trials. Remote Sens. 2020, 12, 4039. [Google Scholar] [CrossRef]
- Granshaw, S.I. RPV, UAV, UAS, RPAS or Just Drone? Photogramm. Rec. 2018, 33, 160–170. [Google Scholar] [CrossRef]
- Zhang, X.; Kusrini, K. Autonomous Long-Range Drone Detection System for Critical Infrastructure Safety. Multimed. Tools Appl. 2021, 80, 23723–23743. [Google Scholar] [CrossRef]
- Guo, M.; Zhang, Z.; Liu, H.; Huang, Y. NDSRGAN: A Novel Dense Generative Adversarial Network for Real Aerial Imagery Super-Resolution Reconstruction. Remote Sens. 2022, 14, 1574. [Google Scholar] [CrossRef]
- Liang, J.; Gong, J.; Li, W. Applications and Impacts of Google Earth: A Decadal Review (2006–2016). ISPRS J. Photogramm. Remote Sens. 2018, 146, 91–107. [Google Scholar] [CrossRef]
- Ngom Vougat, R.R.B.; Chouto, S.; Aoudou Doua, S.; Garabed, R.; Zoli Pagnah, A.; Gonne, B. Using Google EarthTM and Geographical Information System Data as Method to Delineate Sample Domains for an Urban Household Surveys: The Case of Maroua (Far North Region-Cameroon). Int. J. Health Geogr. 2019, 18, 22. [Google Scholar] [CrossRef] [PubMed]
- World Bank Tapping the Potential of Drones for Development. Available online: https://www.worldbank.org/en/topic/transport/brief/drones-for-development.print (accessed on 20 February 2023).
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef] [PubMed]
- Jawd, S.M.; Almuhana, W.H.Y.; Hussein, H.A. Technologies and Types of Remote Sensors. Adv. Electr. Devices 2021, 6, 15–23. [Google Scholar]
- Zhu, W.; Cao, Z.; Luo, P.; Tang, Z.; Zhang, Y.; Hu, M.; He, B. Urban Flood-Related Remote Sensing: Research Trends, Gaps and Opportunities. Remote Sens. 2022, 14, 5505. [Google Scholar] [CrossRef]
- Almalki, R.; Khaki, M.; Saco, P.M.; Rodriguez, J.F. Monitoring and Mapping Vegetation Cover Changes in Arid and Semi-Arid Areas Using Remote Sensing Technology: A Review. Remote Sens. 2022, 14, 5143. [Google Scholar] [CrossRef]
- Khorram, S.; van der Wiele, C.F.; Koch, F.H.; Nelson, S.A.C.; Potts, M.D. Principles of Applied Remote Sensing; Springer: Cham, Switzerland, 2016; ISBN 978-3-319-22560-9. [Google Scholar]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current Status of Landsat Program, Science, and Applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Gallacher, D. Drone Applications for Environmental Management in Urban Spaces: A Review. Int. J. Sustain. Land Use Urban Plan. 2016, 3, 1–14. [Google Scholar] [CrossRef]
- Mohd Jaafar, W.S.W.; Maulud, K.N.A.; Muhmad Kamarulzaman, A.M.; Raihan, A.; Sah, S.M.; Ahmad, A.; Maizah Saad, S.N.; Mohd Azmi, A.T.; Syukri, N.K.A.J.; Khan, W.R. The Influence of Deforestation on Land Surface Temperature-A Case Study of Perak and Kedah, Malaysia. Forests 2020, 11, 670. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Saad, S.N.M.; Maulud, K.N.A.; Jaafar, W.S.W.M.; Kamarulzaman, A.M.M.; Omar, H. Tree Stump Height Estimation Using Canopy Height Model at Tropical Forest in Ulu Jelai Forest Reserve, Pahang, Malaysia. IOP Conf. Ser. Earth Environ. Sci. 2020, 540, 012015. [Google Scholar] [CrossRef]
- Saad, S.N.M.; Wan Mohd Jaafar, W.S.; Omar, H.; Abdul Maulud, K.N.; Muhmad Kamarulzaman, A.M.; Adrah, E.; Mohd Ghazali, N.; Mohan, M. Modeling Carbon Emissions of Post-Selective Logging in the Production Forests of Ulu Jelai, Pahang, Malaysia. Remote Sens. 2023, 15, 1016. [Google Scholar] [CrossRef]
- Wellmann, T.; Lausch, A.; Andersson, E.; Knapp, S.; Cortinovis, C.; Jache, J.; Scheuer, S.; Kremer, P.; Mascarenhas, A.; Kraemer, R.; et al. Remote Sensing in Urban Planning: Contributions towards Ecologically Sound Policies? Landsc. Urban Plan. 2020, 204, 103921. [Google Scholar] [CrossRef]
- Alwedyan, S. Monitoring Urban Growth and Land Use Change Detection with GIS Techniques In Irbid City, Jordan. Int. Rev. Spat. Plan. Sustain. Dev. 2023, 11, 253–275. [Google Scholar] [CrossRef]
- Núñez, J.M.; Medina, S.; Ávila, G.; Montejano, J. Satellite Information Classification and Interpretation; Rustamov, R.B., Ed.; IntechOpen: London, UK, 2019; ISBN 978-1-83880-567-8. [Google Scholar]
- Guo, J.; Zhang, M. Exploring the Patterns and Drivers of Urban Expansion in the Texas Triangle Megaregion. Land 2021, 10, 1244. [Google Scholar] [CrossRef]
- Adrah, E.; Wan Mohd Jaafar, W.S.; Omar, H.; Bajaj, S.; Leite, R.V.; Mazlan, S.M.; Silva, C.A.; Chel Gee Ooi, M.; Mohd Said, M.N.; Abdul Maulud, K.N.; et al. Analyzing Canopy Height Patterns and Environmental Landscape Drivers in Tropical Forests Using NASA’s GEDI Spaceborne LiDAR. Remote Sens. 2022, 14, 3172. [Google Scholar] [CrossRef]
- Dong, P.; Chen, Q.; Weng, Q. (Eds.) LiDAR Remote Sensing and Applications; CRC Press: Bloomfield, IN, USA, 2018; ISBN 978-1-4822-4301-7. [Google Scholar]
- De Paul, O.V. Remote Sensing: New Applications for Urban Areas. Proc. IEEE 2007, 95, 2267–2268. [Google Scholar] [CrossRef]
- Soergel, U. Radar Remote Sensing of Urban Areas; Institute of Photogrammetry and GeoInformation: Hannover, Germany, 2010. [Google Scholar]
- Kucharczyk, M.; Hugenholtz, C.H. Remote Sensing of Natural Hazard-Related Disasters with Small Drones: Global Trends, Biases, and Research Opportunities. Remote Sens. Environ. 2021, 264, 112577. [Google Scholar] [CrossRef]
- Tan, K.C.; Lim, H.S.; MatJafri, M.Z.; Abdullah, K. Landsat Data to Evaluate Urban Expansion and Determine Land Use/Land Cover Changes in Penang Island, Malaysia. Environ. Earth Sci. 2010, 60, 1509–1521. [Google Scholar] [CrossRef]
- Gibril, M.B.A.; Kalantar, B.; Al-Ruzouq, R.; Ueda, N.; Saeidi, V.; Shanableh, A.; Mansor, S.; Shafri, H.Z.M. Mapping Heterogeneous Urban Landscapes from the Fusion of Digital Surface Model and Unmanned Aerial Vehicle-Based Images Using Adaptive Multiscale Image Segmentation and Classification. Remote Sens. 2020, 12, 1081. [Google Scholar] [CrossRef]
- Sliuzas, R.; Kuffer, M.; Masser, I. The Spatial and Temporal Nature of Urban Objects. In Remote Sensing and Digital Image Processing; Springer: Berlin/Heidelberg, Germany, 2010; Volume 10, pp. 67–84. [Google Scholar]
- Anderson, J.R.; Hardy, E.E.; Roach, J.T.; Witmer, R.E. A Land Use and Land Cover Classification System for Use with Remote Sensor Data; Geological Survey: Alexandria, Egypt, 1976; pp. 1–34. [Google Scholar]
- Schöpfer, E.; Lang, S.; Srobl, J. Segmentation and Object-Based Image Analysis. In Remote Sensing of Urban and Suburban Areas; Rashed, T., Jurgens, C., Eds.; Springer Science: London, UK, 2010; Volume 10, pp. 181–192. ISBN 978-1-4020-4371-0. [Google Scholar]
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote Sensing UAV/Drones and Its Applications for Urban Areas: A Review. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012003. [Google Scholar] [CrossRef]
- Lin, X.; Xu, M.; Cao, C.; Singh, R.P.; Chen, W.; Ju, H. Land-Use/Land-Cover Changes and Their Influence on the Ecosystem in Chengdu City, China during the Period of 1992–2018. Sustain. Switz. 2018, 10, 3580. [Google Scholar] [CrossRef]
- Thapa, R.B.; Murayama, Y. Urban Growth Modeling of Kathmandu Metropolitan Region, Nepal. Comput. Environ. Urban Syst. 2011, 35, 25–34. [Google Scholar] [CrossRef]
- Coutts, A.M.; Harris, R.J.; Phan, T.; Livesley, S.J.; Williams, N.S.G.; Tapper, N.J. Thermal Infrared Remote Sensing of Urban Heat: Hotspots, Vegetation, and an Assessment of Techniques for Use in Urban Planning. Remote Sens. Environ. 2016, 186, 637–651. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Persello, C.; Sliuzas, R.; Vosselman, G. Monitoring Household Upgrading in Unplanned Settlements with Unmanned Aerial Vehicles. Int. J. Appl. Earth Obs. Geoinf. 2020, 90, 102117. [Google Scholar] [CrossRef]
- Maithani, S.; Shankar, H.N. Studying Urban Growth Dynamics in Indo-Gangetic Plain. In Advancements in Urban Environmental Studies: Application of Geospatial Technology and Artificial Intelligence in Urban Studies; Rahman, A., Sen Roy, S., Talukdar, S., Shahfahad, Eds.; Springer: Cham, Switzerland, 2023; pp. 101–111. ISBN 978-3-031-21587-2. [Google Scholar]
- Tiwari, A.; Tyagi, D.; Sharma, S.K.; Suresh, M.; Jain, K. Multi-Criteria Decision Analysis for Identifying Potential Sites for Future Urban Development in Haridwar, India. In ICCCE 2018; Kumar, A., Mozar, S., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2019; Volume 500, pp. 761–777. ISBN 9789811302114. [Google Scholar]
- Huxley, M.; Inch, A. Urban Planning. In International Encyclopedia of Human Geography, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2019; pp. 87–92. ISBN 978-0-08-102295-5. [Google Scholar]
- Gallacher, D. Drones to Manage the Urban Environment: Risks, Rewards, Alternatives. J. Unmanned Veh. Syst. 2016, 4, 115–124. [Google Scholar] [CrossRef]
- Gonzalez, B. Issue 2 Article 3 1-3-2017 Drones and Privacy in the Golden State; 33 Santa Clara Computer & High Tech. L. J.: Santa Clara, CA, USA, 2017; Volume 33, p. 288. [Google Scholar]
- Uddin, M. Drone 101: A Must-Have Guide for Any Drone Enthusiast; Amazon Kindle: Washington, DC, USA, 2020. [Google Scholar]
- Palik, M.; Nagy, M. Brief History of UAV Development. Repüléstudományi Közlemények 2019, 31, 155–166. [Google Scholar] [CrossRef]
- Kamarulzaman, A.M.M.; Wan Mohd Jaafar, W.S.; Abdul Maulud, K.N.; Saad, S.N.M.; Omar, H.; Mohan, M. Integrated Segmentation Approach with Machine Learning Classifier in Detecting and Mapping Post Selective Logging Impacts Using UAV Imagery. Forests 2022, 13, 48. [Google Scholar] [CrossRef]
- Puchalski, R.; Giernacki, W. UAV Fault Detection Methods, State-of-the-Art. Drones 2022, 6, 330. [Google Scholar] [CrossRef]
- González-Jorge, H.; Martínez-Sánchez, J.; Bueno, M.; Arias, P. Unmanned Aerial Systems for Civil Applications: A Review. Drones 2017, 1, 2. [Google Scholar] [CrossRef]
- Rennie, J. Drone Types_ Multi-Rotor, Fixed-Wing, Single Rotor, Hybrid VTOL. Available online: https://www.auav.com.au/articles/drone-types/ (accessed on 16 February 2023).
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A Survey of Hybrid Unmanned Aerial Vehicles. Prog. Aerospace Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- Singh, N.K.; Muthukrishnan, P.; Sanpini, S. Industrial System Engineering for Drones: A Guide with Best Practices for Designing; Apress: Berkeley, CA, USA, 2019; ISBN 978-1-4842-3533-1. [Google Scholar]
- Singhal, G.; Bansod, B.; Mathew, L. Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review. Engineering 2018, 2018, 110601. [Google Scholar] [CrossRef]
- Yunus, A.M.; Hamzah, A.H.; Azmi, F.A. Drone Technology as A Modern Tool in Monitoring the Rural-Urban Development. IOP Conf. Ser. Earth Environ. Sci. 2020, 540, 012076. [Google Scholar] [CrossRef]
- Nyamuhungu, D. The Design and Manufacture of A VTOL UAV. Master’s Thesis, University of Electronic Science and Technology, Sichuan, China, 2022. [Google Scholar] [CrossRef]
- Liao, Y.; Mohammadi, M.E.; Wood, R.L. Deep Learning Classification of 2D Orthomosaic Images and 3D Point Clouds for Post-Event Structural Damage Assessment. Drones 2020, 4, 24. [Google Scholar] [CrossRef]
- Preethi Latha, T.; Naga Sundari, K.; Cherukuri, S.; Prasad, M.V.V.S.V. Remote Sensing UAV/Drone Technology as A Tool For Urban Development Measures in APCRDA. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 525–529. [Google Scholar] [CrossRef]
- Paul, A.; Nayana, P.N.; Shaji, M.P.; Joseph, M.; Lakshmipriya, K.A. UAV Aerial Imagery: Mapping & 3d Modelling. Int. J. Res. Trends Innov. 2022, 7, 656–662. [Google Scholar]
- Saifizi, M.; Azani Mustafa, W.; Syahirah Mohammad Radzi, N.; Aminudin Jamlos, M.; Zulkarnain Syed Idrus, S. UAV Based Image Acquisition Data for 3D Model Application. IOP Conf. Ser. Mater. Sci. Eng. 2020, 917, 012074. [Google Scholar] [CrossRef]
- Duran, Z.; Ozcan, K.; Atik, M.E. Classification of Photogrammetric and Airborne LiDAR Point Clouds Using Machine Learning Algorithms. Drones 2021, 5, 104. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Chin, K.S.H.; Siu, A.C.Y.; Ying, S.Y.K.; Zhang, Y. Da Jiang Innovation, DJI: The Future of Possible. Acad. Asian Bus. Rev. 2017, 3, 83–109. [Google Scholar] [CrossRef]
- Zanelii, E.; Bodecker, H. Drone-Market-Analysis-2022–2030; Drone Industry Insights UG: Hamburg, Germany, 2022. [Google Scholar]
- Gallagher, K. Drones, and the Future of Urban Planning. Available online: https://www.simulyze.com/blog/drones-and-the-future-of-urban-planning (accessed on 20 February 2023).
- Jenkins, D.; Vasigh, B. The Economic Impact of Unmanned Aircraft Systems Integration in The United States. Available online: https://www.auvsi.org/our-impact/economic-report (accessed on 18 April 2023).
- Chang, J.-H.; Huynh, P. Asean In Transformation: The Future Of Jobs At Risk Of Automation; International Labour Office Organization: Geneva, Switzerland, 2016; Volume 9, ISBN 978-92-2-130965-9. [Google Scholar]
- Lutkevich, B. Drone (UAV). Available online: https://www.techtarget.com/iotagenda/definition/drone?vgnextfmt=print (accessed on 20 February 2023).
- Agapiou, A. Vegetation Extraction Using Visible-Bands from Openly Licensed Unmanned Aerial Vehicle Imagery. Drones 2020, 4, 27. [Google Scholar] [CrossRef]
- Murray, L. E&T Engineering & Technology; IET Services: Wales, UK, 2022. [Google Scholar]
- Apvrille, L.; Roudier, Y.; Tanzi, T.J. Autonomous Drones for Disasters Management: Safety and Security Verifications. In Proceedings of the 2015 1st URSI Atlantic Radio Science Conference (URSI AT-RASC), Gran Canaria, Spain, 18–25 May 2015; pp. 1–2. [Google Scholar]
- Engel, M.; Andreas, H.; Eric, S.; Stephan, D.; Peichl, M. Recent Results of a UAV-Based Synthetic Aperture Radar for Remote Sensing Applications. In Proceedings of the 13th European Conference on Synthetic Aperture Radar, Online, 29–31 April 2021. [Google Scholar]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Kucharczyk, M.; Hugenholtz, C.H.; Zou, X. UAV–LiDAR Accuracy in Vegetated Terrain. J. Unmanned Veh. Syst. 2018, 6, 212–234. [Google Scholar] [CrossRef]
- Insider Intelligence Future of Drones_ Applications & Uses of Drone Technology in 2021. Available online: https://www.businessinsider.com/drone-technology-uses-applications (accessed on 20 February 2023).
- Jones, G.L. The Use Of Armed Drones By Law Enforcement: A Need For Essential Elements In Policy. Bachelor’s Thesis, Oklahoma State University, Stillwater, OK, USA, 2019. [Google Scholar]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry Applications of UAVs in Europe: A Review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Radzki, G.; Nielsen, P.; Banaszak, Z. UAV Mission Planning Resistant to Weather Uncertainty. Sensors 2020, 20, 515. [Google Scholar] [CrossRef]
- Gao, M.; Hugenholtz, C.H.; Fox, T.A.; Kucharczyk, M.; Barchyn, T.E.; Nesbit, P.R. Weather Constraints on Global Drone Flyability. Sci. Rep. 2021, 11, 12092. [Google Scholar] [CrossRef]
- Jiménez López, J.; Mulero-Pázmány, M. Drones for Conservation in Protected Areas: Present and Future. Drones 2019, 3, 10. [Google Scholar] [CrossRef]
- Duffy, J.; Anderson, K.; Shapiro, A.; Avino, F.S.; Glover-Kapfer, P. WWF Conservation Technology, Drone Technologies for Conservation. WWF 2020, 1, 124. [Google Scholar]
- CASA Drone Safety Rules for Recreational Drone Operators. Available online: https://www.casa.gov.au/sites/default/files/2021-03/transcript-drone-safety-rules-recreational-drone-operators.pdf (accessed on 8 February 2023).
- Civil Aviation Authority of Malaysia. CAAM Report for Standard Requirement for The Application of Drone Permit (Below 20kg); CAAM: UAS–02/2019; Civil Aviation Authority of Malaysia: Kuala Lumpur, Malaysia, 2019.
- Mcllrath, L. Drones: Benefits Study High Level Findings. MOT009.18.; Ministry of Transport: Wellington, New Zealand, 2019. Available online: https://www.transport.govt.nz/assets/Uploads/Report/04062019-Drone-Benefit-Study.pdf (accessed on 8 February 2023).
- Hristozov, S.; Zlateva, P. Concept Model for Drone Selection in Specific Disaster Conditions. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-3/W4, 245–249. [Google Scholar] [CrossRef]
- Dolesh, R.J. The Drones Are Coming. Available online: https://www.nrpa.org/parks-recreation-magazine/2015/march/the-drones-are-coming/ (accessed on 21 February 2023).
- Leyzerova, A.; Sharovarova, E.; Alekhin, V. Sustainable Strategies of Urban Planning. Procedia Eng. 2016, 150, 2055–2061. [Google Scholar] [CrossRef]
- Hassan, M.I.; Elhassan, S.M.M. Modelling of Urban Growth and Planning: A Critical Review. J. Build. Constr. Plan. Res. 2020, 8, 245–262. [Google Scholar] [CrossRef]
- Al-Ghiyadh, M.A.-K.; Al-Khafaji, S.J.N. The Role of Urban Planning and Urban Design on Safe Cities. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1058, 012065. [Google Scholar] [CrossRef]
- Mouratidis, K. Urban Planning and Quality of Life: A Review of Pathways Linking the Built Environment to Subjective Well-Being. Cities 2021, 115, 1–12. [Google Scholar] [CrossRef]
- Hahn, R.A.; Truman, B.I. Education Improves Public Health, and Promotes Health Equity. Int. J. Health Serv. 2015, 45, 657–678. [Google Scholar] [CrossRef]
- Pardo, C.F.; Jiemian, Y.; Mohanty, C.R. Chapter 4—Sustainable Urban Transport. In Shanghai Manual—A Guide for Sustainable Urban Development in the 21st Century; United Nations Department of Economic and Social Affairs (UNDESA): Shanghai, China, 2012; pp. 1–38. [Google Scholar]
- WHO. Urban Planning for Resilience and Health: Key Messages; World Health Organization: Geneva, Switzerland, 2022; pp. 1–36. [Google Scholar]
- Arouri, M.E.H.; Youssef, A.B.; Nguyen-Viet, C.; Soucat, A. 2014. Effects of Urbanization on Economic Growth and Human Capital Formation in Africa. PGDA Working Paper No. 119, Harvard University. Available online: http://www.hsph.harvard.edu/pgda/working.htm (accessed on 18 April 2023).
- WEC. Inspiring Future Cities & Urban Services Shaping the Future of Urban Development & Services Initiative; World Economic Forum: Geneva, Switzerland, 2016; pp. 1–60. [Google Scholar]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D City Models: State of the Art Review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef]
- Wingtra Drones in Construction and Infrastructure—Why and How to Use Them. Available online: https://wingtra.com/drone-mapping-applications/drones-in-construction-and-infrastructure/ (accessed on 23 February 2023).
- Fainstein, S.S. Urban Planning. Available online: https://www.britannica.com/topic/urban-planning (accessed on 8 March 2023).
- Drescher, A.W. Technical Tools for Urban Land Use Planning; Technical Report for University of Freiburg; University of Freiburg: Freiburg, Germany, 2001; pp. 1–4. [Google Scholar]
- Lurev, A. Role of Data in Urban Planning and Development Case City; Lahti. Bachelor’s Degree Thesis, Lab University of Applied Sciences, Lahti, Finland, 2020. [Google Scholar]
- Stout, W.R. Bridging the Geospatial Education-Workforce Divide: A Case Study on How Higher Education Can Address the Emerging Geospatial drivers And Trends Of The Intelligent web Mapping Era. Ph.D. Thesis, Liberty University, Lynchburg, VA, USA, 2022. [Google Scholar]
- Bendig, J.; Bolten, A.; Bareth, G. Introducing A Low-Cost Mini-UAV For Thermal- And Multispectral-Imaging. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B1, 345–349. [Google Scholar] [CrossRef]
- Gini, R.; Passoni, D.; Pinto, L.; Sona, G. Aerial Images from An UAV System: 3d Modeling And Tree Species Classification In A Park Area. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B1, 361–366. [Google Scholar] [CrossRef]
- Pérez, M.; Agüera, F.; Carvajal, F. Low-Cost Surveying Using an Unmanned Aerial Vehicle. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 311–315. [Google Scholar] [CrossRef]
- Rau, J.Y.; Jhan, J.P.; Lo, C.F.; Lin, Y.S. Landslide Mapping Using Imagery Acquired By A Fixed-Wing UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1/C22, 195–200. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Herrick, J.E.; Rango, A.; Winters, C. Acquisition, Orthorectification, and Object-Based Classification of Unmanned Aerial Vehicle (UAV) Imagery for Rangeland Monitoring. Photogramm. Eng. Remote Sens. 2010, 76, 661–672. [Google Scholar] [CrossRef]
- Cramer, M.; Bovet, S.; Gültlinger, M.; Honkavaara, E.; McGill, A.; Rijsdijk, M.; Tabor, M.; Tournadre, V. On The Use Of RPAS In National Mapping—The Eurosdr Point Of View. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 93–99. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, H.; Yang, W. Forests Growth Monitoring Based on Tree Canopy 3D Reconstruction Using UAV Aerial Photogrammetry. Forests 2019, 10, 1052. [Google Scholar] [CrossRef]
- Noor, N.M.; Abdullah, A.; Hashim, M. Remote Sensing UAV/Drones and Its Applications for Urban Areas: A Review. In Proceedings of the IOP Conference Series: Earth and Environmental Science; Institute of Physics Publishing: Kuala Lumpur, Malaysia, 2018. [Google Scholar] [CrossRef]
- Qin, Y.; Kishk, M.A.; Alouini, M.-S. Stochastic Geometry-Based Analysis of Multi-Purpose UAVs for Package and Data Delivery. Internet Things J. 2023, 10, 4664–4676. [Google Scholar] [CrossRef]
- Kelcey, J.; Lucieer, A. Sensor Correction of a 6-Band Multispectral Imaging Sensor for UAV Remote Sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Gruen, A.; Huang, X.; Qin, R.; Du, T.; Fang, W.; Boavida, J.; Oliveira, A. Joint Processing of UAV Imagery And Terrestrial Mobile Mapping System Data For Very High Resolution City Modeling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 175–182. [Google Scholar] [CrossRef]
- Onwudinjo, K.C.; Smit, J. Estimating the Performance of Multi-Rotor Unmanned Aerial Vehicle Structure-from-Motion (UAVsfm) Imagery in Assessing Homogeneous and Heterogeneous Forest Structures: A Comparison to Airborne and Terrestrial Laser Scanning. South Afr. J. Geomat. 2022, 11, 65–83. [Google Scholar] [CrossRef]
- Gruen, A.; Zhang, Z.; Eisenbeiss, H. UAV Photogrammetry in Remote Areas—3d Modeling Of Drapham Dzong Bhutan. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B1, 375–379. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV Photogrammetry for Mapping And 3d Modeling—Current Status and Future Perspectives. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-1/C22, 25–31. [Google Scholar] [CrossRef]
- Arias-Rosales, A.; LeDuc, P.R. Shadow Modeling in Urban Environments for Solar Harvesting Devices with Freely Defined Positions and Orientations. Renew. Sustain. Energy Rev. 2022, 164, 112522. [Google Scholar] [CrossRef]
- Patrucco, G.; Giulio Tonolo, F.; Sammartano, G.; Spanò, A. Sfm-Based 3d Reconstruction Of Heritage Assets Using UAV Thermal Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLIII-B1-2022, 399–406. [Google Scholar] [CrossRef]
- Lee, D.; Hess, D.J.; Heldeweg, M.A. Safety and Privacy Regulations for Unmanned Aerial Vehicles: A Multiple Comparative Analysis. Technol. Soc. 2022, 71, 102079. [Google Scholar] [CrossRef]
- Rout, B.K.; Sikdar, B.K. Hazard Identification, Risk Assessment, and Control Measures as an Effective Tool of Occupational Health Assessment of Hazardous Process in an Iron Ore Pelletizing Industry. Indian J. Occup. Environ. Med. 2017, 21, 56–76. [Google Scholar] [CrossRef] [PubMed]
- Halder, S.; Afsari, K. Robots in Inspection and Monitoring of Buildings and Infrastructure: A Systematic Review. Appl. Sci. 2023, 13, 2304. [Google Scholar] [CrossRef]
- Feroz, S.; Dabous, S.A. Uav-Based Remote Sensing Applications for Bridge Condition Assessment. Remote Sens. 2021, 13, 1809. [Google Scholar] [CrossRef]
- Rakha, T.; Gorodetsky, A. Review of Unmanned Aerial System (UAS) Applications in the Built Environment: Towards Automated Building Inspection Procedures Using Drones. Autom. Constr. 2018, 93, 252–264. [Google Scholar] [CrossRef]
- Flyability A Guide to How Drones Are Used for Inspections. Available online: https://www.flyability.com/drone-inspections (accessed on 25 February 2023).
- Kangunde, V.; Jamisola, R.S.; Theophilus, E.K. A Review on Drones Controlled in Real-Time. Int. J. Dyn. Control 2021, 9, 1832–1846. [Google Scholar] [CrossRef]
- Han, D.; Lee, S.B.; Song, M.; Cho, J.S. Change Detection in Unmanned Aerial Vehicle Images for Progress Monitoring of Road Construction. Buildings 2021, 11, 150. [Google Scholar] [CrossRef]
- Hu, S.; Tong, L.; Frazier, A.E.; Liu, Y. Urban Boundary Extraction and Sprawl Analysis Using Landsat Images: A Case Study in Wuhan, China. Habitat Int. 2015, 47, 183–195. [Google Scholar] [CrossRef]
- Crommelinck, S.; Höfle, B.; Koeva, M.N.; Yang, M.Y.; Vosselman, G. Interactive Cadastral Boundary Delineation from UAV Data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV-2, 81–88. [Google Scholar] [CrossRef]
- Zhou, L.; Meng, R.; Tan, Y.; Lv, Z.; Zhao, Y.; Xu, B.; Zhao, F. Comparison of UAV-Based LiDAR and Digital Aerial Photogrammetry for Measuring Crown-Level Canopy Height in the Urban Environment. Urban For. Urban Green. 2022, 69, 127489. [Google Scholar] [CrossRef]
- Avtar, R.; Watanabe, T. Unmanned Aerial Vehicle: Applications in Agriculture and Environment; Springer Nature Switzerland AG: Cham, Switzerland, 2020; pp. 1–255. ISBN 978-3-030-27156-5. [Google Scholar]
- Moreno-Armendáriz, M.; Calvo, H.; Duchanoy, C.; López-Juárez, A.; Vargas-Monroy, I.; Suarez-Castañon, M. Deep Green Diagnostics: Urban Green Space Analysis Using Deep Learning and Drone Images. Sensors 2019, 19, 5287. [Google Scholar] [CrossRef]
- Son, S.W.; Yu, J.J.; Kim, D.W.; Park, H.S.; Yoon, J.H. Applications of Drones for Environmental Monitoring of Pollutant-Emitting Facilities. Proc. Natl. Inst. Ecol. Repub. Korea 2021, 2, 298–304. [Google Scholar] [CrossRef]
- Minea, M.; Dumitrescu, C.M. Urban Traffic Noise Analysis Using UAV-Based Array of Microphones. Sensors 2023, 23, 1912. [Google Scholar] [CrossRef]
- Themistocleous, K. The Use of UAVs for Cultural Heritage and Archaeology. In Remote Sensing for Archaeology and Cultural Landscapes; Hadjimitsis, D.G., Themistocleous, K., Cuca, B., Agapiou, A., Lysandrou, V., Lasaponara, R., Masini, N., Schreier, G., Eds.; Springer Remote Sensing/Photogrammetry Series; Springer: Cham, Switzerland, 2020; pp. 241–269. ISBN 978-3-030-10978-3. [Google Scholar]
- Ronchi, D.; Limongiello, M.; Demetrescu, E.; Ferdani, D. Multispectral UAV Data and GPR Survey for Archeological Anomaly Detection Supporting 3D Reconstruction. Sensors 2023, 23, 2769. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Cao, Y.; Zhou, J. The Application of Drones in Urban Fire Monitoring. In Proceedings of the Cyber Security Intelligence and Analytics; Xu, Z., Alrabaee, S., Loyola-González, O., Zhang, X., Cahyani, N.D.W., Ab Rahman, N.H., Eds.; Springer: Cham, Switzerland, 2022; pp. 537–544. [Google Scholar]
- Kinaneva, D.; Hristov, G.; Raychev, J.; Zahariev, P. Early Forest Fire Detection Using Drones and Artificial Intelligence. In Proceedings of the 2019 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1060–1065. [Google Scholar]
- Koolwal, A.; Hussain, A.; Vairavel, A. Exploring Applications of Machine Learning for Wildfire Monitoring and Detection Using Unmanned Aerial Vehicles; Technical Report for National Aeronautics and Space Administration NASA/TM—20220016356; National Aeronautics and Space Administration: Hampton, VA, USA, September 2022. Available online: http://sti.nasa.gov/ (accessed on 18 April 2023).
- Blankenship, S.F.; Tan, K.K.H. The Survival of Cultural Patterns in Malaysia’s Contemporary Visual Landscape. In Contemporary Asian Artistic Expressions and Tourism, Perspectives on Asian Tourism; Mura, P., Ed.; Springer Nature: Singapore, 2020; pp. 147–167. [Google Scholar]
- DOSM Gross Domestic Product (GDP) By State 2021; Department of Statistics Malaysia: Kuala Lumpur, Malaysia, 2021.
- Zolkepli, F.; Camoens, A. Batang Kali Landslide: Search Focusing on Two of Three Zones. Available online: https://www.thestar.com.my/news/nation/2022/12/16/batang-kali-landslide-search-focusing-on-two-of-three-zones (accessed on 13 March 2023).
- Seng, C.H. Urbanization in Malaysia and Potential of Social Innovation Business; Hitachi Global Innovation Report: Kuala Lumpur, Malaysia, 2018. [Google Scholar]
- Talha, K. Urban Crime and Safe Neighbourhoods: Community Perspectives. J. Malays. Inst. Plan. 2008, 4, 39–55. [Google Scholar]
- Siong, H.C. Urban Governance and Rapid Urbanization Issues in Malaysia. J. Alam Bina. 2008, 13, 1–24. [Google Scholar]
- Yasin, M.Y.; Zain, M.A.M.; Hassan, M.H. Urbanization and Growth of Greater Kuala Lumpur: Issues and Recommendations for Urban Growth Management. Southeast Asia Multidiscip. J. 2022, 22, 4–19. [Google Scholar]
- Rosni, N.A.; Mohd Noor, N.; Abdullah, A. Managing Urbanisation and Urban Sprawl in Malaysia by Using Remote Sensing and GIS Applications. J. Malays. Inst. Plan. 2016, 4, 17–30. [Google Scholar] [CrossRef]
- Abdullah, J. City Competitiveness and Urban Sprawl: Their Implications to Socio-Economic and Cultural Life in Malaysian Cities. Procedia—Soc. Behav. Sci. 2012, 50, 20–29. [Google Scholar] [CrossRef]
- Boori, M.S.; Netzband, M.; Choudhary, K.; Voženílek, V. Monitoring and Modeling of Urban Sprawl through Remote Sensing and GIS in Kuala Lumpur, Malaysia. Ecol. Process. 2015, 4, 1–10. [Google Scholar] [CrossRef]
- Krishnaveni, K.S.; Anilkumar, P.P. Managing Urban Sprawl Using Remote Sensing and GIS. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRS Archives: Baltimore, MD, USA, 2019; pp. 59–66. [Google Scholar]
- Sridhar, M.B.; Sathyanathan, R.; Subramani, R.; Sudalaimathu, K. Urban Sprawl Analysis Using Remote Sensing Data and Its Impact on Surface Water Bodies: Case Study of Surat, India. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Mohd Noor, N.; Abdullah, A.A.A.; Abdullah, A.; Ibrahim, I.; Sabeek, S. 3D City Modeling Using Multirotor Drone for City Heritage Conservation. Plan. Malays. J. 2019, 17. [Google Scholar] [CrossRef]
- Gohari, A.; Ahmad, A.B.; Oloruntobi, O.O. Recent Drone Applications in Malaysia: An Overview. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-4/W6-2022, 131–137. [Google Scholar] [CrossRef]
- Omar, M.R.; Masrom, A.N.; Mohamed, S.; Ahamad, J. Reviewing Challenges of Drone Technology Application Amongst Contractor G7. Res. Manag. Technol. Bus. 2022, 3, 599–611. [Google Scholar]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of Drone in Disaster Management: A Scoping Review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Geraeds, M.; van Emmerik, T.; de Vries, R.; bin Ab Razak, M.S. Riverine Plastic Litter Monitoring Using Unmanned Aerial Vehicles (UAVs). Remote Sens. 2019, 11, 2045. [Google Scholar] [CrossRef]
- Mustaffa, A.A.; Hasmori, M.F.; Sarif, A.S.; Ahmad, N.F.; Zainun, N.Y. The Use of UAV in Housing Renovation Identification: A Case Study at Taman Manis 2. IOP Conf. Ser. Earth Environ. Sci. 2018, 140, 012003. [Google Scholar] [CrossRef]
- Lin Tan, L.K.; Lim, B.C.; Park, G.; Low, K.H.; Seng Yeo, V.C. Public Acceptance of Drone Applications in a Highly Urbanized Environment. Technol. Soc. 2021, 64, 101462. [Google Scholar] [CrossRef]
- Aiman Abdullah, A.A.; Noor, N.M.; Abdullah, A. Drone 3D Mapping in Identifying Malay Urban Form: Case Study of Kota Bharu. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012084. [Google Scholar] [CrossRef]
- Noor, N.M.; Afiq, A.; Abdullah, A.; Abdullah, A.; Ibrahim, I.; Sabeek, S. 3D Building Modelling Reconstruction for Sustainable Safeguarding Native Malay Urban Architectural in Malaysia; IOP Publishing: Bristol, UK, 2019; pp. 338–349. [Google Scholar]
- Zainudin, A.Z. Application of Drone in Visual Inspection for Construction Project. Bachelor’s Degree Thesis, University Malaysia Pahang, Pahang, Malaysia, 2015. [Google Scholar]
- Kaamin, M.; Razali, S.N.M.; Ahmad, N.F.A.; Bukari, S.M.; Ngadiman, N.; Kadir, A.A.; Hamid, N.B. The Application of Micro UAV in Construction Project; AIP Publishing LLC: Kedah, Malaysia, 2017; p. 020070. [Google Scholar]
- Bravo-Bello, J.C.; Martinez-Trinidad, T.; Valdez-Lazalde, J.R.; Romero-Sanchez, M.E.; Martinez-Trinidad, S. Analyzing Potential Tree-Planting Sites and Tree Coverage in Mexico City Using Satellite Imagery. Forests 2020, 11, 423. [Google Scholar] [CrossRef]
- Civil Aviation Authority of Malaysia. CAAM Report for Remote Pilot Training Organization; CAD 6011 Part (I); Civil Aviation Authority of Malaysia: Putrajaya, Malaysia, 2022.
- Abd Mukti, S.N.; Tahar, K.N. Low Altitude Photogrammetry for Urban Road Mapping. Built Environ. J. 2021, 18, 31. [Google Scholar] [CrossRef]
- CAAM. Civil Aviation Directive—6011 Part V Unmanned Aircraft System, Special UAS Project; Civil Aviation Authority of Malaysia: Putrajaya, Malaysia, 2021; p. 230.
- Srivetbodee, S.; Igel, B. Digital Technology Adoption in Agriculture: Success Factors, Obstacles and Impact on Corporate Social Responsibility Performance in Thailand’s Smart Farming Projects. Thammasat Rev. 2021, 24, 149–170. [Google Scholar] [CrossRef]
- Zhou, G.; Tan, Z.; Cheng, P.; Chen, W. Modeling and Visualizing 3d Urban Environment Via Internet for Urban Planning and Monitoring. In Proceedings of the International Society for Photogrammetry and Remote Sensing; Elsevier: Amsterdam, The Netherlands, 2004; pp. 1–7. [Google Scholar]
- KPKT. Malaysia Smart City Framework; Ministry of Housing and Local Government: Putrajaya, Malaysia, 2018.
- Hashim, A.S.; Tamizi, M.S.M. Development of Drone for Search and Rescue Operation in Malaysia Flood Disaster. Int. J. Eng. Technol. 2018, 7, 9–12. [Google Scholar] [CrossRef]
- Samad, A.; Alvarez Florez, D.; Chourdakis, I.; Vogt, U. Concept of Using an Unmanned Aerial Vehicle (UAV) for 3D Investigation of Air Quality in the Atmosphere—Example of Measurements Near a Roadside. Atmosphere 2022, 13, 663. [Google Scholar] [CrossRef]
- Wagner, B.; Egerer, M. Application of UAV Remote Sensing and Machine Learning to Model and Map Land Use in Urban Gardens. J. Urban Ecol. 2022, 8, juac008. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Categories | Description |
|---|---|
| Fixed wing | A UAV with a fixed wing and propeller that allows it to fly long distances and remain airborne for extended periods. Typically used for surveying, mapping, and monitoring applications. |
| Multirotor | A UAV with multiple rotors (usually four, six, or eight) that provide lift and maneuverability. Commonly used for aerial photography and videography, as well as recreational purposes. |
| Single-rotor helicopter | A UAV with a single rotor and a tail rotor for stability and control. Often used in professional settings such as search and rescue, law enforcement, and military applications. |
| Hybrid | A UAV that combines features of both fixed-wing and multirotor UAVs. Capable of long-distance flight as well as vertical take-off and landing. Used for various industrial and commercial applications. |
| Nano | A small UAV that can fit in the palm of your hand. Typically used for indoor flying and aerial photography. |
| Racing | A high-speed UAV designed for competitive racing. Often equipped with first-person view (FPV) cameras to allow pilots to race through courses from a first-person perspective. |
| Autonomous | A UAV that can operate without human intervention. Typically used for surveillance, mapping, and monitoring applications. |
| Delivery | A UAV designed to transport packages or other payloads. Currently being tested for various commercial applications, including delivering food and medical supplies. |
| UAV Type | Features | Use Cases |
|---|---|---|
| Micro/Nano | Small, lightweight, agile | Indoor inspection, search and rescue in tight spaces, aerial photography |
| Fixed-Wing | Long range, high speed, high endurance | Traffic monitoring, surveying, and mapping, agriculture, infrastructure inspection |
| Multirotor | Maneuverable, agile, versatile | Aerial photography, videography, delivery, search and rescue, inspection |
| Hybrid | Vertical take-off and landing (VTOL), long range | Emergency response, surveillance, delivery |
| Autonomous | GPS and sensor-enabled navigation, obstacle avoidance | Surveillance, inspection, mapping and surveying, search, and rescue |
| Regulation | Description |
|---|---|
| Civil Aviation Regulation | Governs the operation of UAVs for commercial and recreational purposes. Includes rules on UAV registration, flight restrictions, and air traffic control requirements. |
| Malaysian Communications and Multimedia Commission Act 1998 | Regulates the use of radio frequencies for UAV communication and control. Requires UAVs to use frequencies allocated by the commission |
| Malaysian Aviation Commission Act | Establishes the Malaysian Aviation Commission, which is responsible for regulating aviation in Malaysia, including UAVs. |
| Guidelines for the Flying of Unmanned Aircraft Systems (UAS) in Malaysia | Guides the safe and legal operation of UAVs in Malaysia, including requirements for pilot certification, UAV registration, and flight safety. |
| Restricted Areas (Temporary) (Amendment) Order Aeronautical Information Publication Malaysia | Defines the boundaries of restricted airspace in Malaysia, including areas around airports, military bases, and other sensitive locations. |
| Aeronautical Information Publication Malaysia | Contains information on airspace and air navigation procedures for aviation in Malaysia, including rules and regulations for UAVs. |
| Personal Data Protection Act 2010 | Regulates the collection, use, and disclosure of personal data in Malaysia, including data collected by UAVs. |
| UAV Model | Sensor | Applications |
|---|---|---|
| DJI Phantom 4 Pro | RGB Camera | Mapping of urban areas, 3D modeling, building inspections |
| DJI Mavic 2 Enterprise | Thermal Camera | Detection of heat loss in buildings, search and rescue operations |
| Parrot Anafi USA | Multispectral Camera | Monitoring of vegetation health, identification of land-use patterns |
| Autel Robotics EVO II | LiDAR Sensor | 3D mapping of urban areas, building inspections |
| Skydio 2 | RGB camera | Monitoring of construction sites, traffic analysis |
| WingtraOne | RGB and multispectral cameras | Mapping of large areas, monitoring of land-use changes |
| Year | Number of Registered UAVs in Malaysia |
|---|---|
| 2016 | 300 |
| 2017 | 1000 |
| 2018 | 3000 |
| 2019 | 4500 |
| 2020 | 6000 |
| 2021 | 8000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhmad Kamarulzaman, A.M.; Wan Mohd Jaafar, W.S.; Mohd Said, M.N.; Saad, S.N.M.; Mohan, M. UAV Implementations in Urban Planning and Related Sectors of Rapidly Developing Nations: A Review and Future Perspectives for Malaysia. Remote Sens. 2023, 15, 2845. https://doi.org/10.3390/rs15112845
Muhmad Kamarulzaman AM, Wan Mohd Jaafar WS, Mohd Said MN, Saad SNM, Mohan M. UAV Implementations in Urban Planning and Related Sectors of Rapidly Developing Nations: A Review and Future Perspectives for Malaysia. Remote Sensing. 2023; 15(11):2845. https://doi.org/10.3390/rs15112845
Chicago/Turabian StyleMuhmad Kamarulzaman, Aisyah Marliza, Wan Shafrina Wan Mohd Jaafar, Mohd Nizam Mohd Said, Siti Nor Maizah Saad, and Midhun Mohan. 2023. "UAV Implementations in Urban Planning and Related Sectors of Rapidly Developing Nations: A Review and Future Perspectives for Malaysia" Remote Sensing 15, no. 11: 2845. https://doi.org/10.3390/rs15112845