
Unsupervised Classification of Riverbed Types for Bathymetry Mapping in Shallow Rivers Using UAV-Based Hyperspectral Imagery


Abstract
:1. Introduction
2. Materials and Methods
2.1. Field Survey
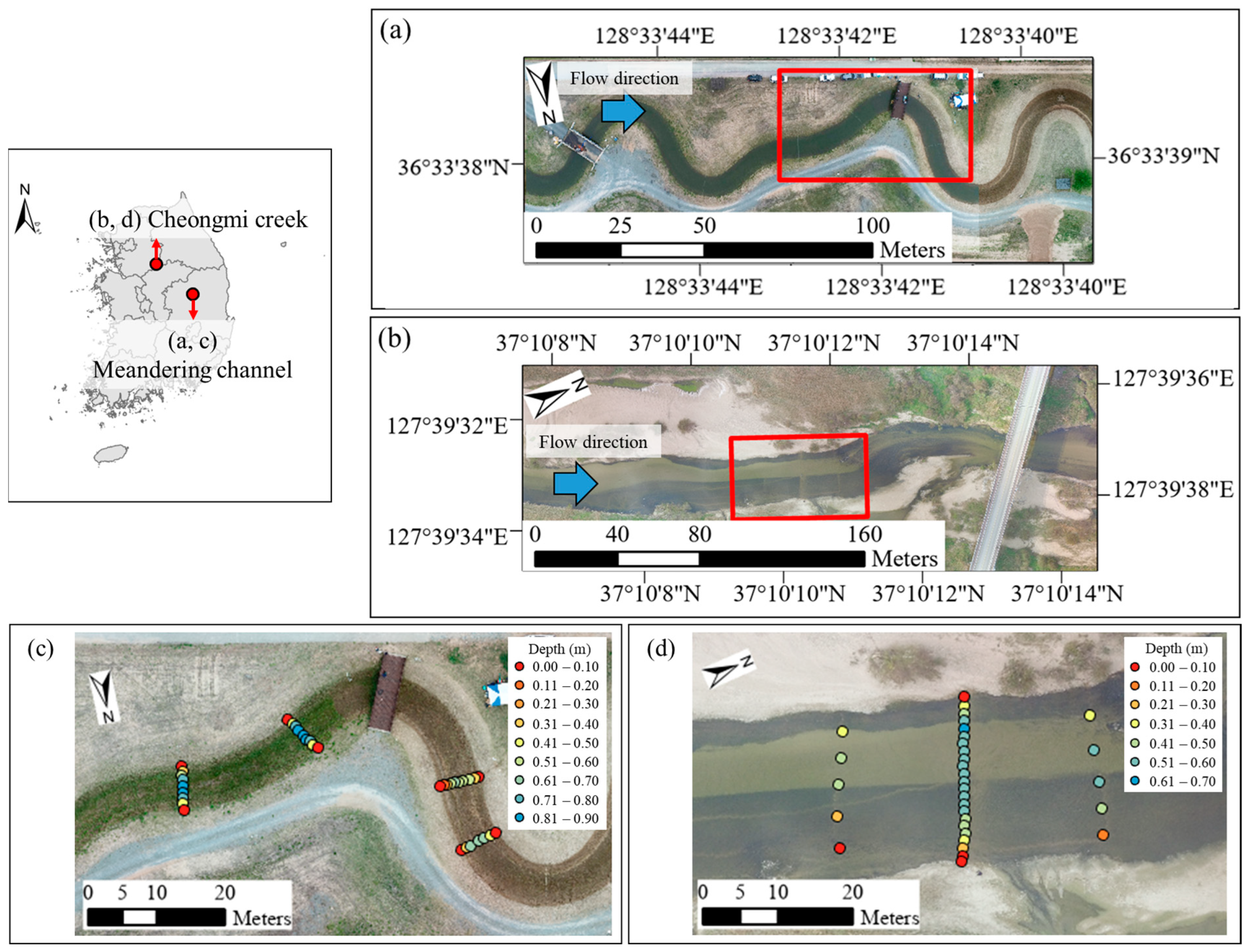
2.1.1. Study Site and In Situ Measurements
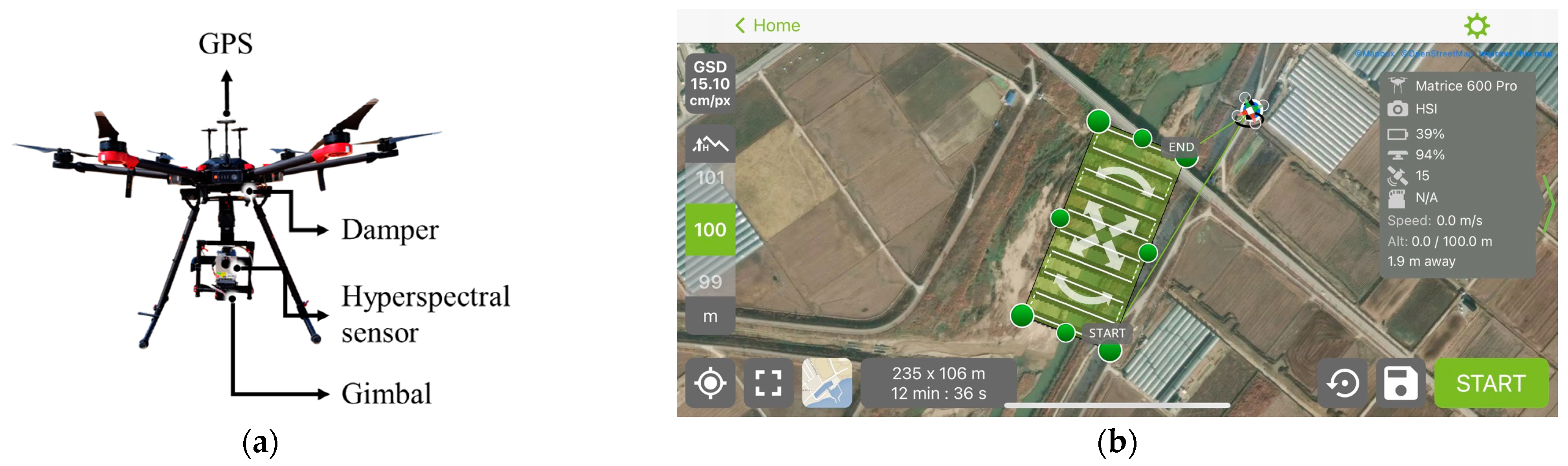
2.1.2. Hyperspectral Data Acquisition
2.2. Hyperspectral Clustering
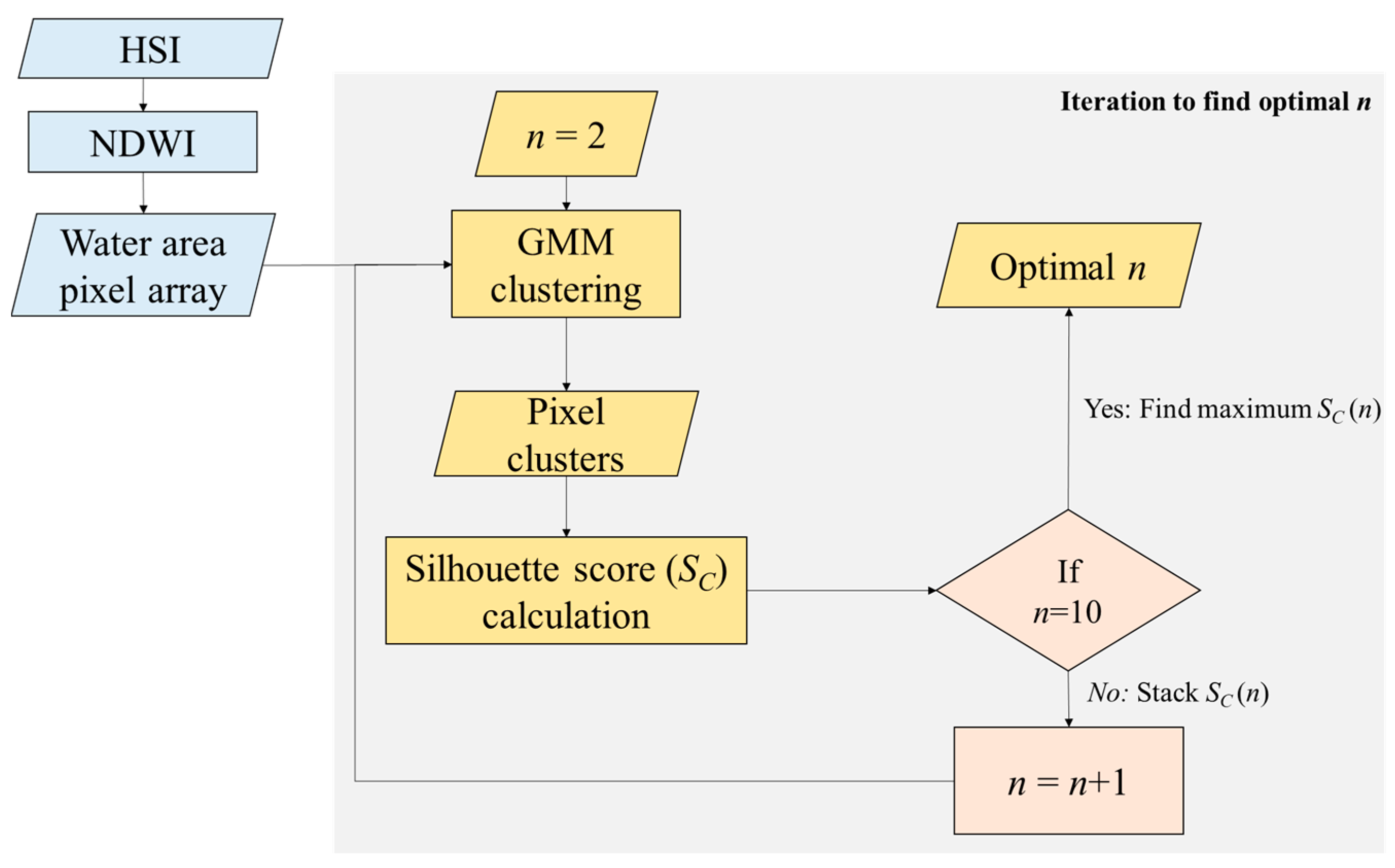
2.2.1. Gaussian Mixture Model (GMM)
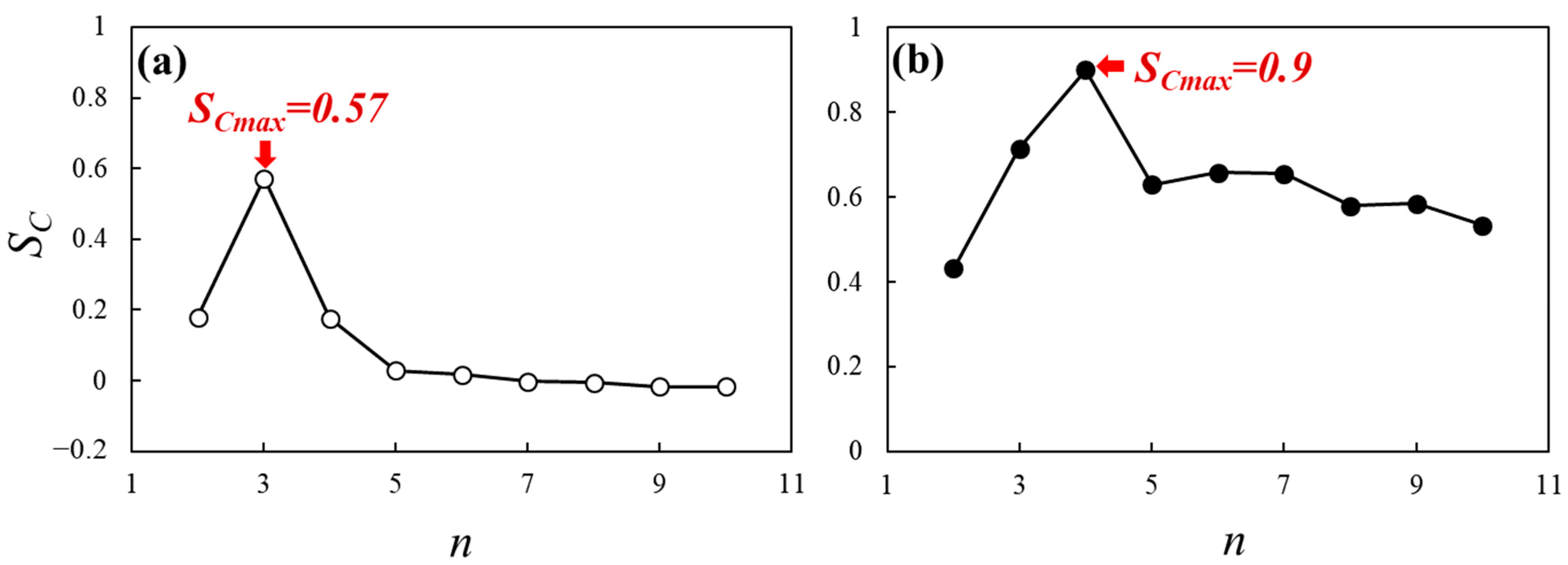
2.2.2. Selection of Optimal Clusters
2.3. OBRA
3. Results and Discussion
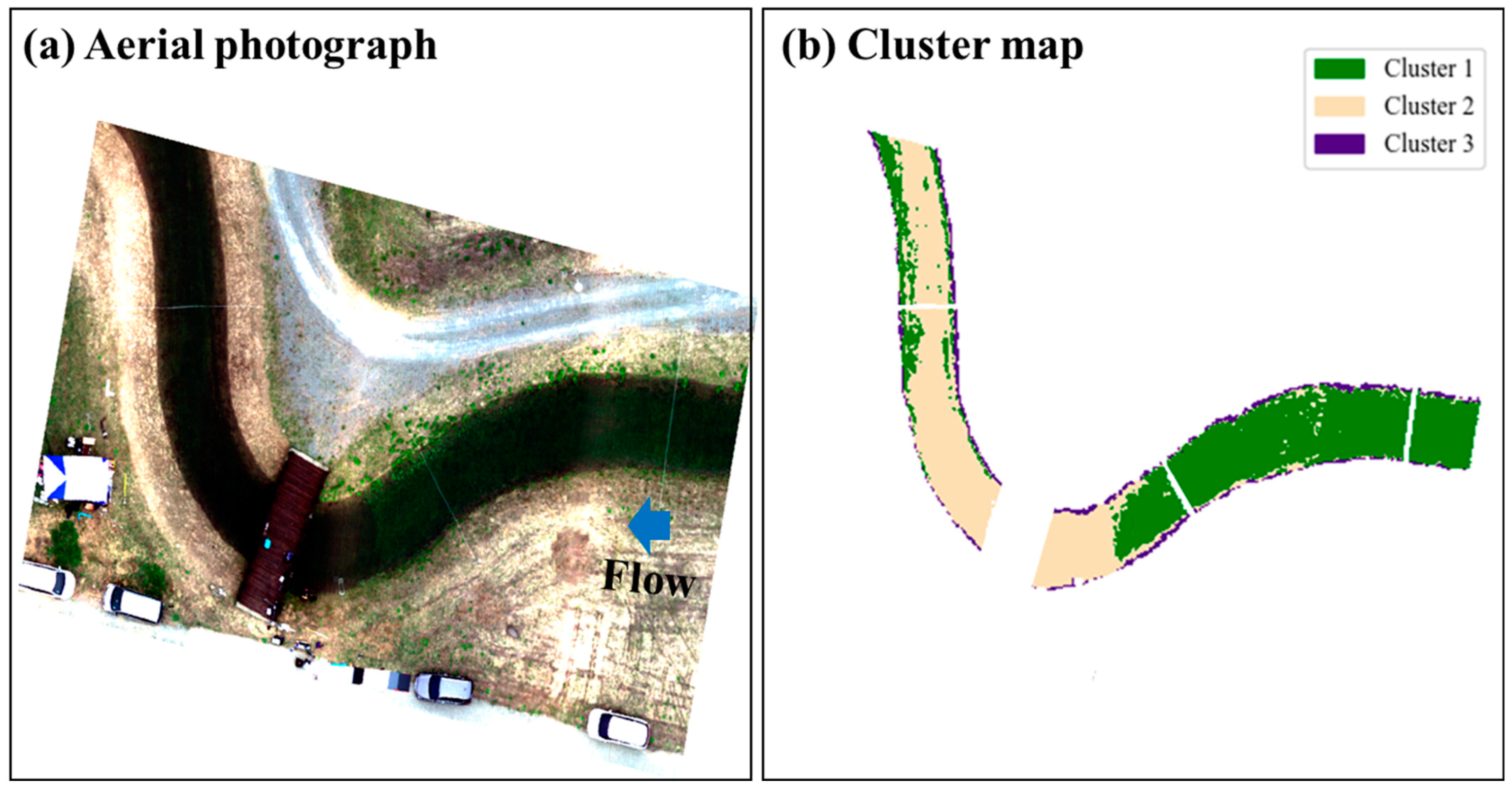
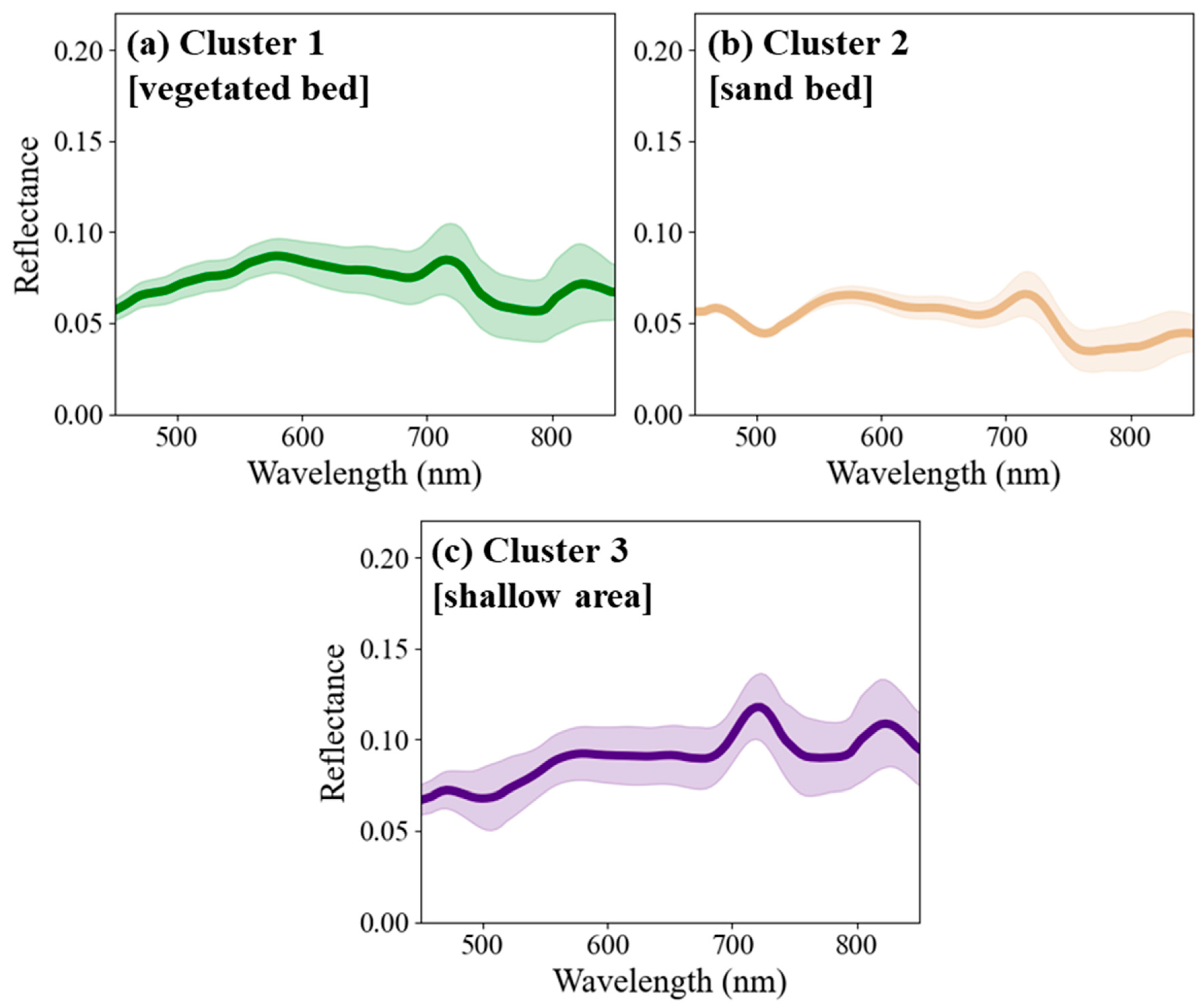
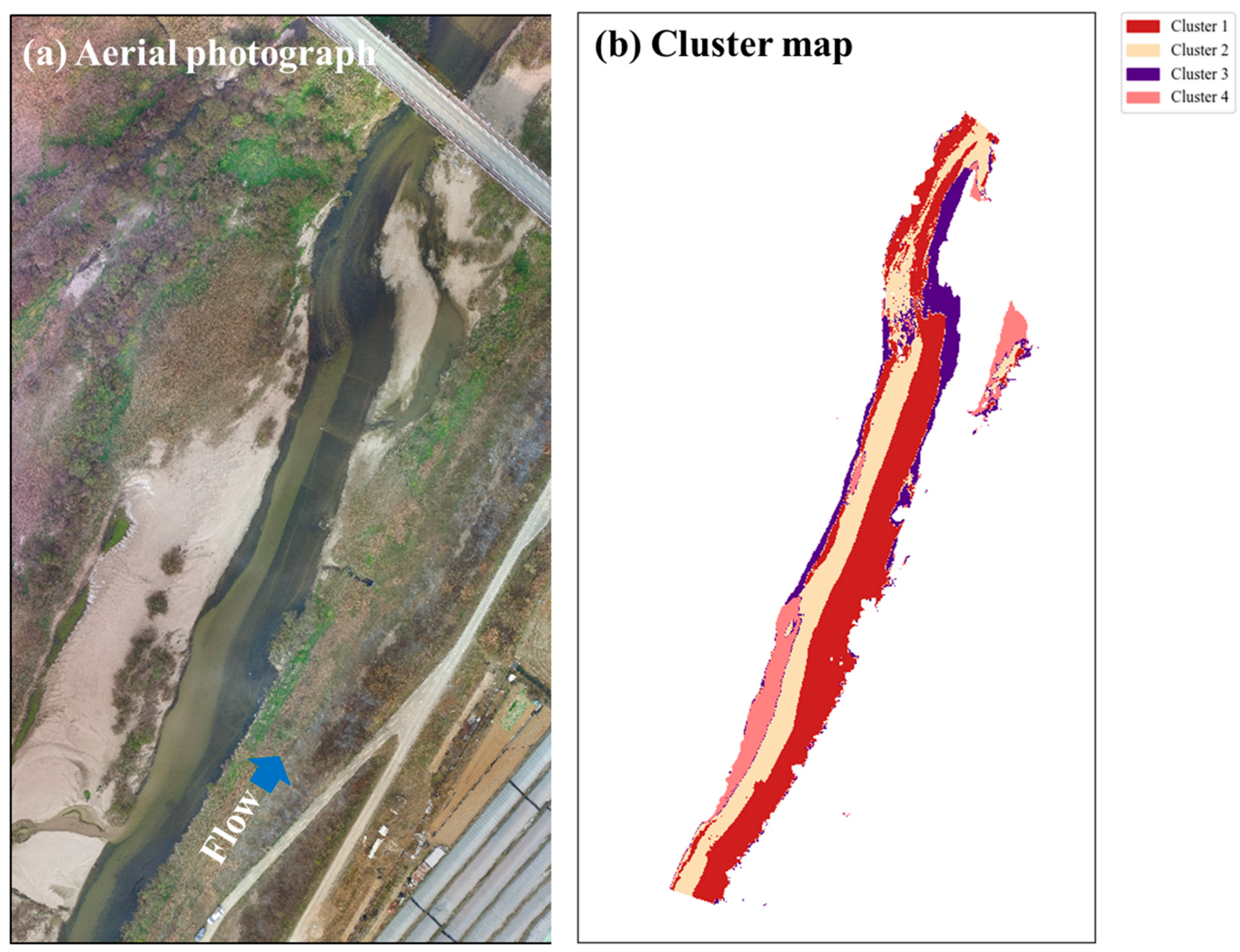
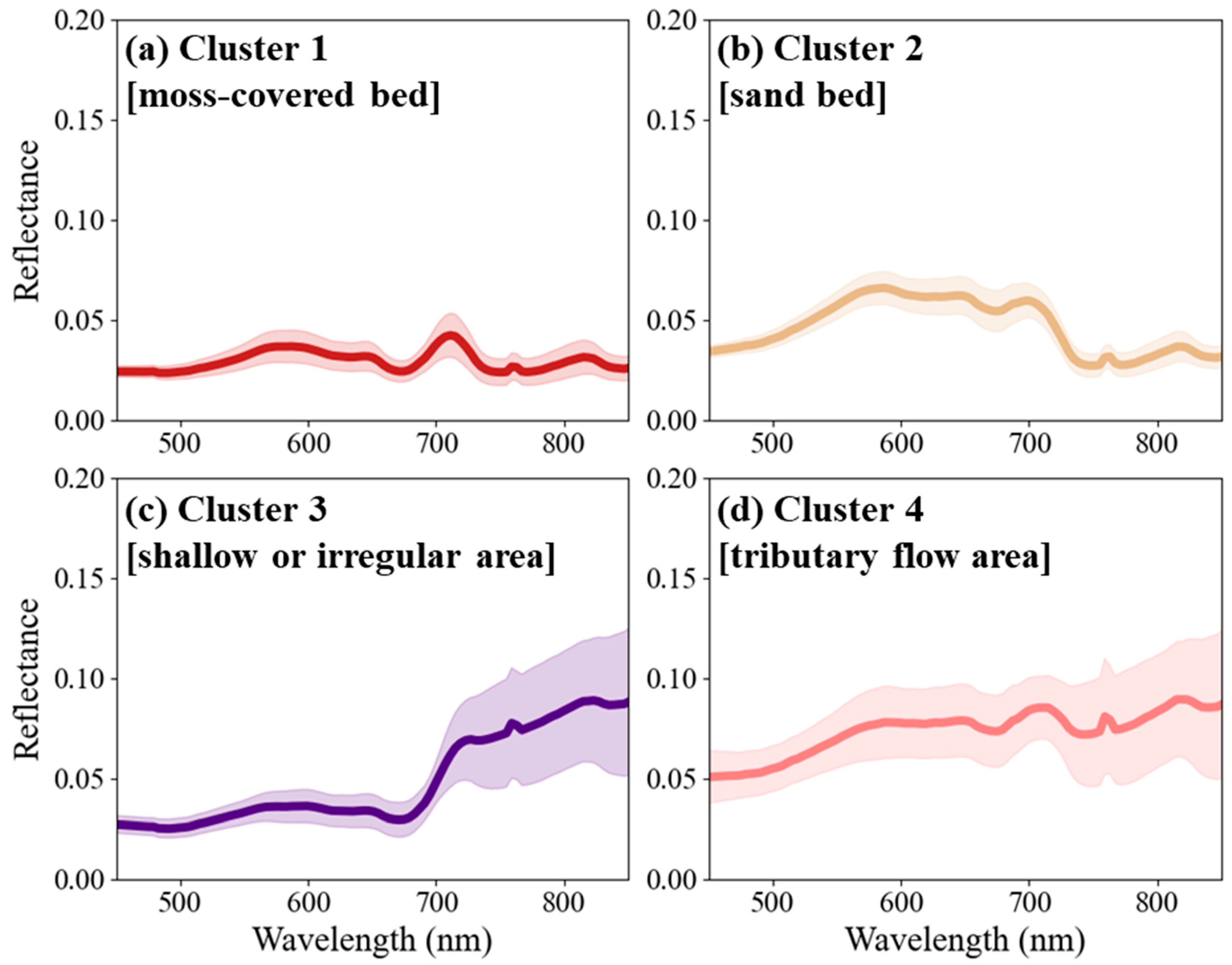
3.1. Classification of the Riverbed Type
3.2. Retrievals of Water Depth According to Riverbed Type
3.3. Discussions and Future Studies
4. Conclusions
- After the optimal number of clusters was determined using SC, Case 2 (natural river) was found to exhibit a higher level of separability among each cluster than Case 1 (field-scale channel), which included only vegetation and sand. Nevertheless, in complex areas arising from underwater trees or very shallow water depths (H < 0.1 m), additional clusters that were distinct from the dominant riverbed clusters were formed.
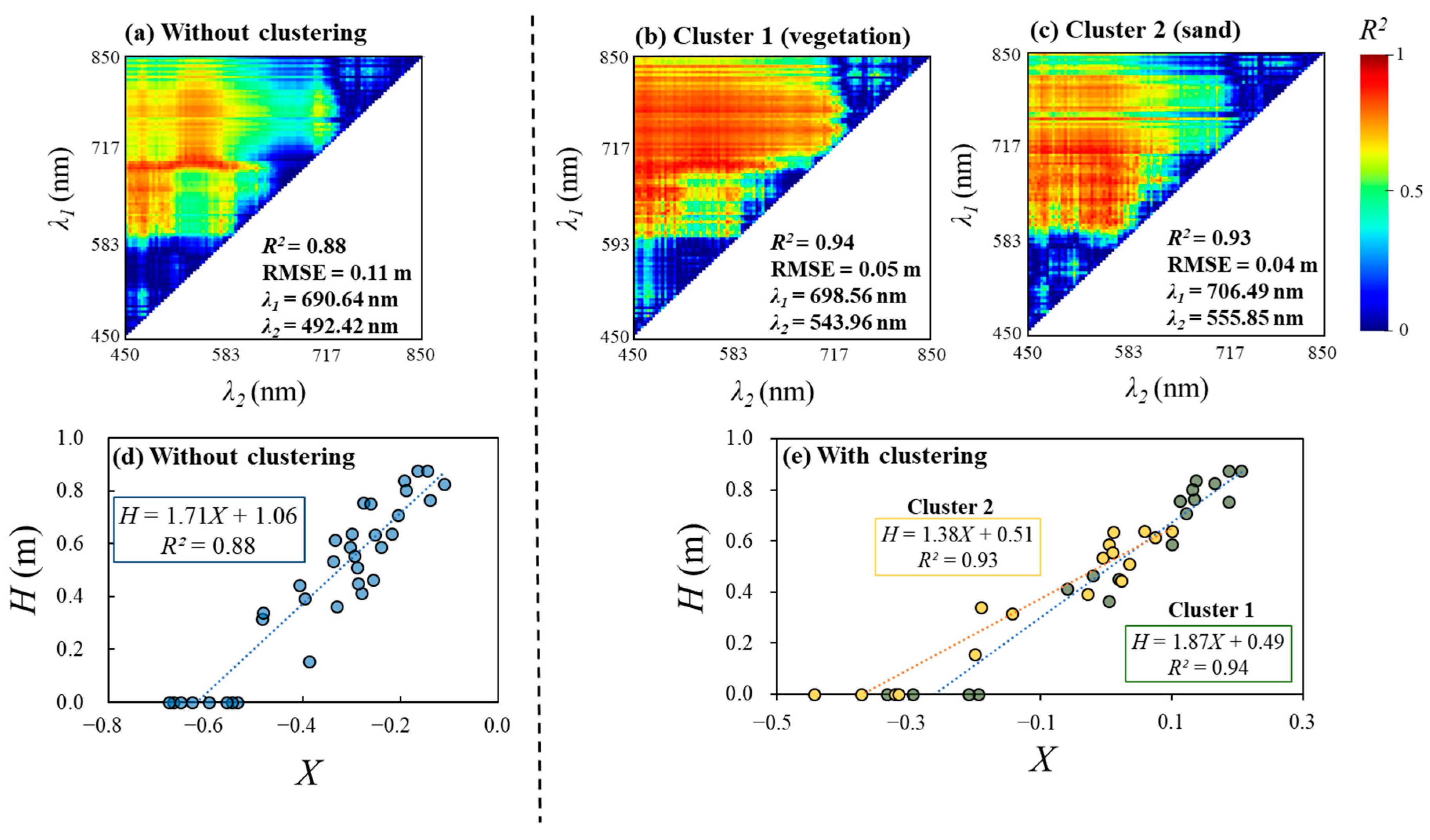
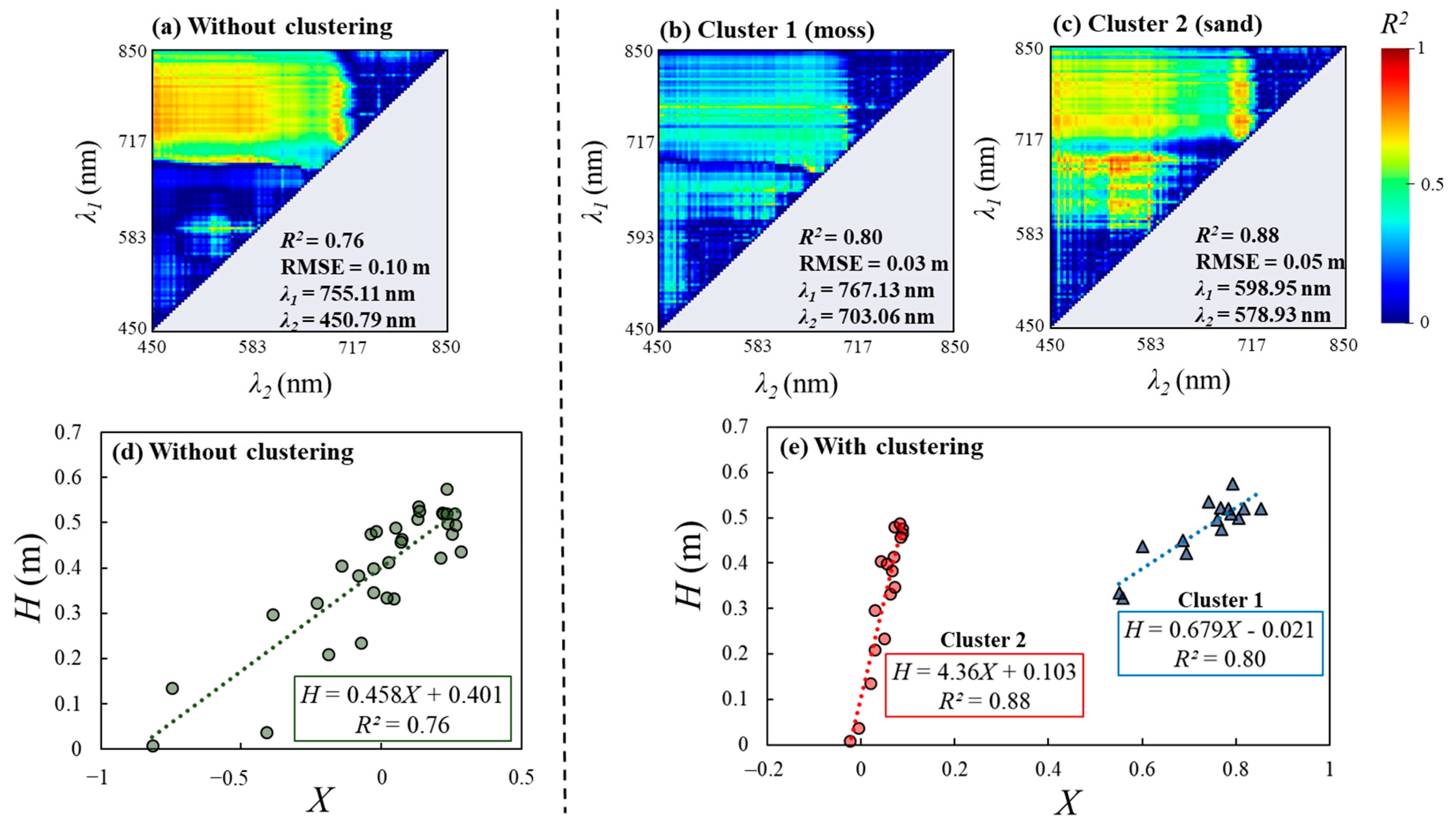
- GMM statistically classified each cluster into areas with distinct spectra in two cases with complex bed conditions: (i) sand and vegetation and (ii) sand and moss-covered bed conditions. Each cluster exhibited a different equation form and an effective wavelength range from OBRA.
- In particular, for Case 2, the moss-covered riverbed exhibited high linearity with water depth, having an R2 of 0.8 only within a specific and narrow wavelength range. This implies that the classification of such a riverbed using GMM with spectrally low-resolution HSIs and a limited range of wavelengths can be challenging.
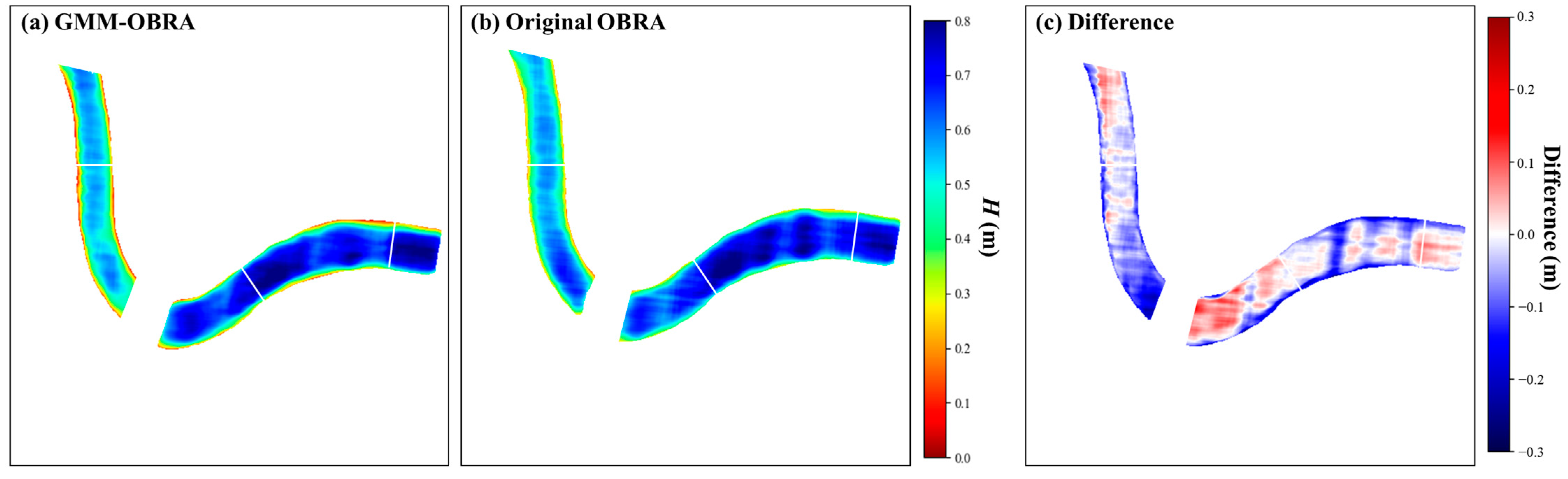
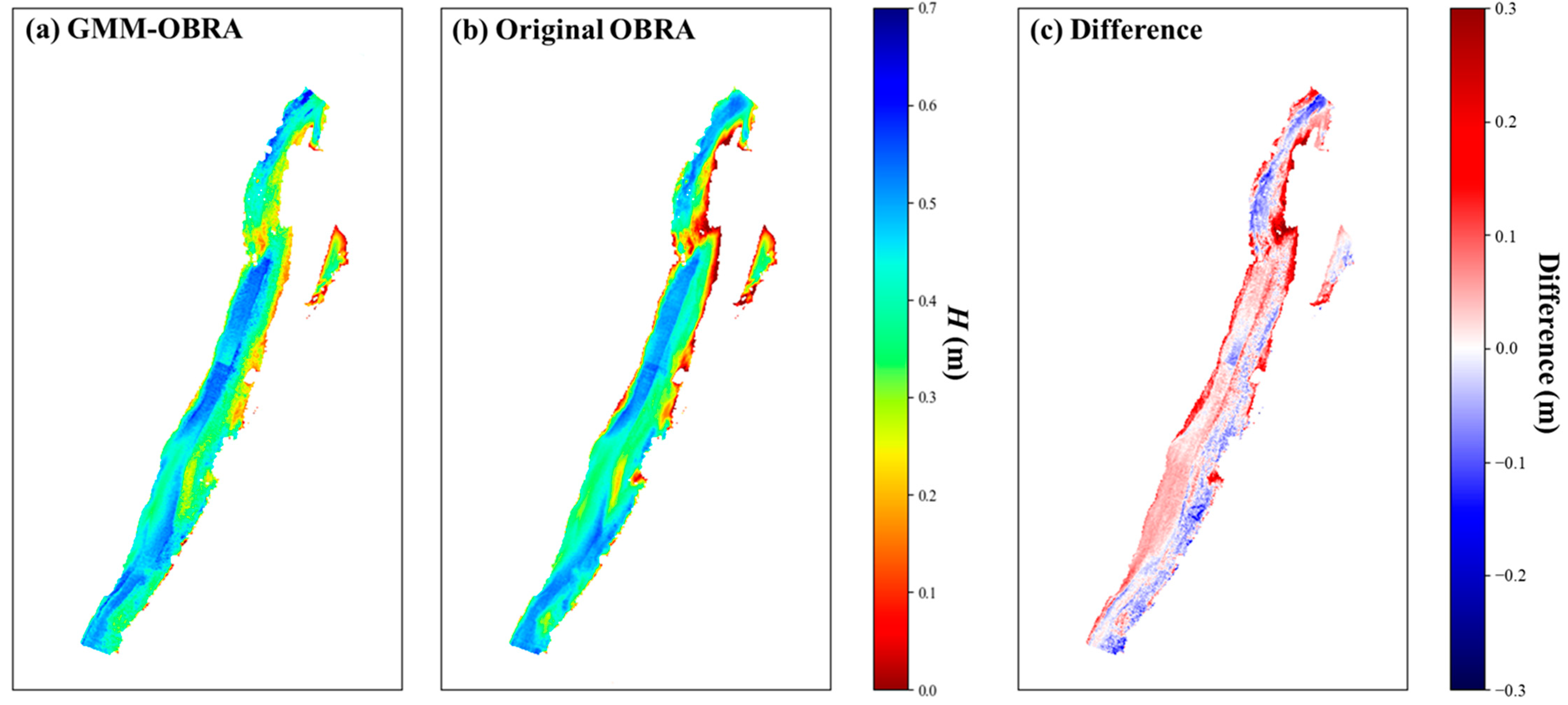
- A considerable discrepancy was observed in the bathymetry mapping results between GMM–OBRA and the original OBRA. The original OBRA tended to either overestimate or underestimate certain clusters compared with GMM–OBRA. On the other hand, GMM–OBRA provided a means for accurately identifying riverbed types, thereby facilitating precise bathymetry mapping using straightforward linear regressors from OBRA.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mallick, J.; Hasan, M.A.; Alashker, Y.; Ahmed, M. Bathymetric and Geochemical Analysis of Lake Al-Saad, Abha, Kingdom of Saudi Arabia Using Geoinformatics Technology. J. Geogr. Inf. Syst. 2014, 6, 440–452. [Google Scholar] [CrossRef]
- Lee, C.H.; Liu, L.W.; Wang, Y.M.; Leu, J.M.; Chen, C.L. Drone-Based Bathymetry Modeling for Mountainous Shallow Rivers in Taiwan Using Machine Learning. Remote Sens. 2022, 14, 3343. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.; Hedley, J.; Klonowski, W.; Lee, Z.P.; et al. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef]
- McKean, J.; Tonina, D.; Bohn, C.; Wright, C.W. Effects of bathymetric lidar errors on flow properties predicted with a multi-dimensional hydraulic model. J. Geophys. Res. Earth Surf. 2014, 119, 644–664. [Google Scholar] [CrossRef]
- Naganna, S.R.; Deka, P.C.; Ch, S.; Hansen, W.F. Factors influencing streambed hydraulic conductivity and their implications on stream–aquifer interaction: A conceptual review. Environ. Sci. Pollut. Res. 2017, 24, 24765–24789. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Pahlevan, N.; Vitti, A. Mapping substrate types and compositions in shallow streams. Remote Sens. 2019, 11, 262. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Kinzel, P.J. Improving Remotely Sensed River Bathymetry by Image-Averaging. Water Resour. Res. 2021, 57, e2020WR028795. [Google Scholar] [CrossRef]
- Visser, F.; Buis, K.; Verschoren, V.; Meire, P. Depth estimation of submerged aquatic vegetation in clear water streams using low-altitude optical remote sensing. Sensors 2015, 15, 25287–25312. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Roberts, D.A.; Lawrence, R.L. Spectrally based remote sensing of river bathymetry. Earth Surf. Process. Landforms 2009, 34, 1039–1059. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Overstreet, B.T.; Kinzel, P.J. Sampling strategies to improve passive optical remote sensing of river bathymetry. Remote Sens. 2018, 10, 935. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Harrison, L.R. Remote Sensing of River Bathymetry: Evaluating a Range of Sensors, Platforms, and Algorithms on the Upper Sacramento River, California, USA. Water Resour. Res. 2019, 55, 2142–2169. [Google Scholar] [CrossRef]
- Moramarco, T.; Barbetta, S.; Bjerklie, D.M.; Fulton, J.W.; Tarpanelli, A. River Bathymetry Estimate and Discharge Assessment from Remote Sensing. Water Resour. Res. 2019, 55, 6692–6711. [Google Scholar] [CrossRef]
- Anker, Y.; Hershkovitz, Y.; Ben Dor, E.; Gasith, A. Application of aerial digital photography for macrophyte cover and composition survey in small rural streams. River Res. Appl. 2013, 30, 925–937. [Google Scholar] [CrossRef]
- Tomsett, C.; Leyland, J. Remote sensing of river corridors: A review of current trends and future directions. River Res. Appl. 2019, 35, 779–803. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- de Almeida, C.T.; Galvao, L.S.; Ometto, J.P.; Jacon, A.D.; de Souza Pereira, F.R.; Sato, L.Y.; Lopes, A.P.; de Alencastro Graça, P.M.; de Jesus Silva, C.V.; Ferreira-Ferreira, J.; et al. Combining LiDAR and hyperspectral data for aboveground biomass modeling in the Brazilian Amazon using different regression algorithms. Remote Sens. Environ. 2019, 232, 111323. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Marcus, W.A. Remote sensing of stream depths with hydraulically assisted bathymetry (HAB) models. Geomorphology 2005, 72, 320–339. [Google Scholar] [CrossRef]
- Al Najar, M.; Benshila, R.; El Bennioui, Y.; Thoumyre, G.; Almar, R.; Bergsma, E.W.J.; Delvit, J.M.; Wilson, D.G. Coastal Bathymetry Estimation from Sentinel-2 Satellite Imagery: Comparing Deep Learning and Physics-Based Approaches. Remote Sens. 2022, 14, 1996. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2 Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Stegman, T.K.; Overstreet, B.T. Spectrally based mapping of riverbed composition. Geomorphology 2016, 264, 61–79. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Vitti, A.; Lyzenga, D.R. Multiple Optimal Depth Predictors Analysis (MODPA) for river bathymetry: Findings from spectroradiometry, simulations, and satellite imagery. Remote Sens. Environ. 2018, 218, 132–147. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. SMART-SDB: Sample-specific multiple band ratio technique for satellite-derived bathymetry. Remote Sens. Environ. 2020, 251, 112091. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Legleiter, C.J.; Bovolo, F. Bathymetry retrieval from CubeSat image sequences with short time lags. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102958. [Google Scholar] [CrossRef]
- Kwon, S.; Shin, J.; Seo, I.W.; Noh, H.; Jung, S.H.; You, H. Measurement of suspended sediment concentration in open channel flows based on hyperspectral imagery from UAVs. Adv. Water Resour. 2022, 159, 104076. [Google Scholar] [CrossRef]
- Matte, P.; Secretan, Y.; Morin, J. Quantifying lateral and intratidal variability in water level and velocity in a tide-dominated river using combined RTK GPS and ADCP measurements. Limnol. Oceanogr. Methods 2014, 12, 281–302. [Google Scholar] [CrossRef]
- Zinger, J.A.; Rhoads, B.L.; Best, J.L.; Johnson, K.K. Flow structure and channel morphodynamics of meander bend chute cutoffs: A case study of the Wabash River, USA. J. Geophys. Res. Earth Surf. 2013, 118, 2468–2487. [Google Scholar] [CrossRef]
- Kwon, S.; Seo, I.W.; Noh, H.; Kim, B. Hyperspectral retrievals of suspended sediment using cluster-based machine learning regression in shallow waters. Sci. Total Environ. 2022, 833, 155168. [Google Scholar] [CrossRef]
- Mekik, C.; Arslanoglu, M. Investigation on accuracies of real time kinematic GPS for GIS applications. Remote Sens. 2009, 1, 22–35. [Google Scholar] [CrossRef]
- MOLIT. Basic Plan for River Maintenance in the Cheongmi Creek, Sejong-si, Korea, 2011. (In Korean). Available online: https://www.codil.or.kr (accessed on 5 January 2023).
- Corning MicroHSI 410 SHARK Brochure. Available online: https://www.corning.com/microsites/coc/oem/documents/hyperspectral-imaging/Corning-MicroHSI-410-SHARK-Brochure.pdf (accessed on 15 March 2023).
- Gwon, Y.; Kim, D.; You, H.; Nam, S.H.; Kim, Y. Do A Standardized Procedure to Build a Spectral Library for Hazardous Chemicals Mixed in River Flow Using Hyperspectral Image. Remote Sens. 2023, 15, 477. [Google Scholar] [CrossRef]
- Gwon, Y.; Kim, D.; You, H.; Han, E.; Kwon, S.; Kim, Y. Development of tracer concentration analysis method using drone-based spatio-temporal hyperspectral image and RGB image. J. Korea Water Resour. Assoc. 2022, 55, 623–634. [Google Scholar] [CrossRef]
- Kim, J.; Gwon, Y.; Park, Y.; Kim, D.; Kwon, J.H.; Kim, Y. Do A study on the analysis of current status of Seonakdong River algae using hyperspectral imaging. J. Korea Water Resour. Assoc. 2022, 55, 301–308. [Google Scholar] [CrossRef]
- Kwon, S.; Seo, I.W.; Lyu, S. Investigating mixing patterns of suspended sediment in a river confluence using high-resolution hyperspectral imagery. J. Hydrol. 2023, 620PB, 129505. [Google Scholar] [CrossRef]
- Labsphere Spectralon Diffuse Reflectance Targets. Available online: https://www.labsphere.com/product/spectralon-reflectance-targets/ (accessed on 15 January 2023).
- Hu, B.L.; Hao, S.J.; Sun, D.X.; Liu, Y.N. A novel scene-based non-uniformity correction method for SWIR push-broom hyperspectral sensors. ISPRS J. Photogramm. Remote Sens. 2017, 131, 160–169. [Google Scholar] [CrossRef]
- Li, E.; Liu, S.; Yin, S.; Fu, X. Nonuniformity correction algorithms of IRFPA based on radiation source scaling. In Proceedings of the 2009 Fifth International Conference on Information Assurance and Security, Xi’an, China, 18–20 August 2009; Volume 1, pp. 317–321. [Google Scholar] [CrossRef]
- Smith, G.M.; Milton, E.J. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Mobley, C.D.; Overstreet, B.T. A framework for modeling connections between hydraulics, water surface roughness, and surface reflectance in open channel flows. J. Geophys. Res. Earth Surf. 2017, 122, 1715–1741. [Google Scholar] [CrossRef]
- Gwon, Y.; Kwon, S.; Kim, D.; Won, I.; You, H. Estimation of shallow stream bathymetry under varying suspended sediment concentrations and compositions using hyperspectral imagery. Geomorphology 2023, 433, 108722. [Google Scholar] [CrossRef]
- Bishop, C. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; ISBN 978-0-387-31073-2. [Google Scholar]
- Kaufman, L.; Rousseuw, P.J. Finding Groups in Data: An Introduction to Cluster Analysis; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1990; ISBN 9780470316801. [Google Scholar]
- Xie, H.; Luo, X.; Xu, X.; Tong, X.; Jin, Y.; Pan, H.; Zhou, B. New hyperspectral difference water index for the extraction of urban water bodies by the use of airborne hyperspectral images. J. Appl. Remote Sens. 2014, 8, 085098. [Google Scholar] [CrossRef]
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water bodies’ mapping from Sentinel-2 imagery with Modified Normalized Difference Water Index at 10-m spatial resolution produced by sharpening the swir band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Zhao, D.; Arshad, M.; Li, N.; Triantafilis, J. Predicting soil physical and chemical properties using vis-NIR in Australian cotton areas. Catena 2021, 196, 104938. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, J.; Zhao, X.; Triantafilis, J. Clay content mapping and uncertainty estimation using weighted model averaging. Catena 2022, 209, 105791. [Google Scholar] [CrossRef]
- Dalmaijer, E.S.; Nord, C.L.; Astle, D.E. Statistical power for cluster analysis. BMC Bioinform. 2022, 23, 1–28. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Jirka, G.H. Experimental study of plane turbulent wakes in a shallow water layer. Fluid Dyn. Res. 1995, 16, 11–41. [Google Scholar] [CrossRef]
- Kwon, S.; Noh, H.; Won, I.; Sung, Y. Effects of spectral variability due to sediment and bottom characteristics on remote sensing for suspended sediment in shallow rivers. Sci. Total Environ. 2023, 878, 163125. [Google Scholar] [CrossRef] [PubMed]
- Kwon, S.; Seo, I.W.; Beak, D. Development of suspended solid concentration measurement technique based on multi-spectral satellite imagery in Nakdong River using machine learning model. J. Korea Water Resour. Assoc. 2021, 54, 121–133. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Site | Experimental Date | Discharge (m3/s) | Bed Materials | Median Particle Size (d50, mm) | Width (m) | Depth Range (m) |
|---|---|---|---|---|---|---|---|
| Case 1 | Field-scale channel (REC) | 4/28/2021 | 2.41 | Vegetation | 1.11 | 5.76 | 0−0.88 (18 points) |
| Sand | 6.26 | 0−0.64 (17 points) | |||||
| Case 2 | Natural river (Cheongmi Creek) | 11/08/2022 | 3.22 | Bright sand | 2.75 | 22.95 | 0−0.63 (17 points) |
| Dark moss- covered sand | 0−0.54 (16 points) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, S.; Gwon, Y.; Kim, D.; Seo, I.W.; You, H. Unsupervised Classification of Riverbed Types for Bathymetry Mapping in Shallow Rivers Using UAV-Based Hyperspectral Imagery. Remote Sens. 2023, 15, 2803. https://doi.org/10.3390/rs15112803
Kwon S, Gwon Y, Kim D, Seo IW, You H. Unsupervised Classification of Riverbed Types for Bathymetry Mapping in Shallow Rivers Using UAV-Based Hyperspectral Imagery. Remote Sensing. 2023; 15(11):2803. https://doi.org/10.3390/rs15112803
Chicago/Turabian StyleKwon, Siyoon, Yeonghwa Gwon, Dongsu Kim, Il Won Seo, and Hojun You. 2023. "Unsupervised Classification of Riverbed Types for Bathymetry Mapping in Shallow Rivers Using UAV-Based Hyperspectral Imagery" Remote Sensing 15, no. 11: 2803. https://doi.org/10.3390/rs15112803