
Real-Time LEO Satellite Orbits Based on Batch Least-Squares Orbit Determination with Short-Term Orbit Prediction


Abstract
:1. Introduction
Proposal
2. Processing Strategy
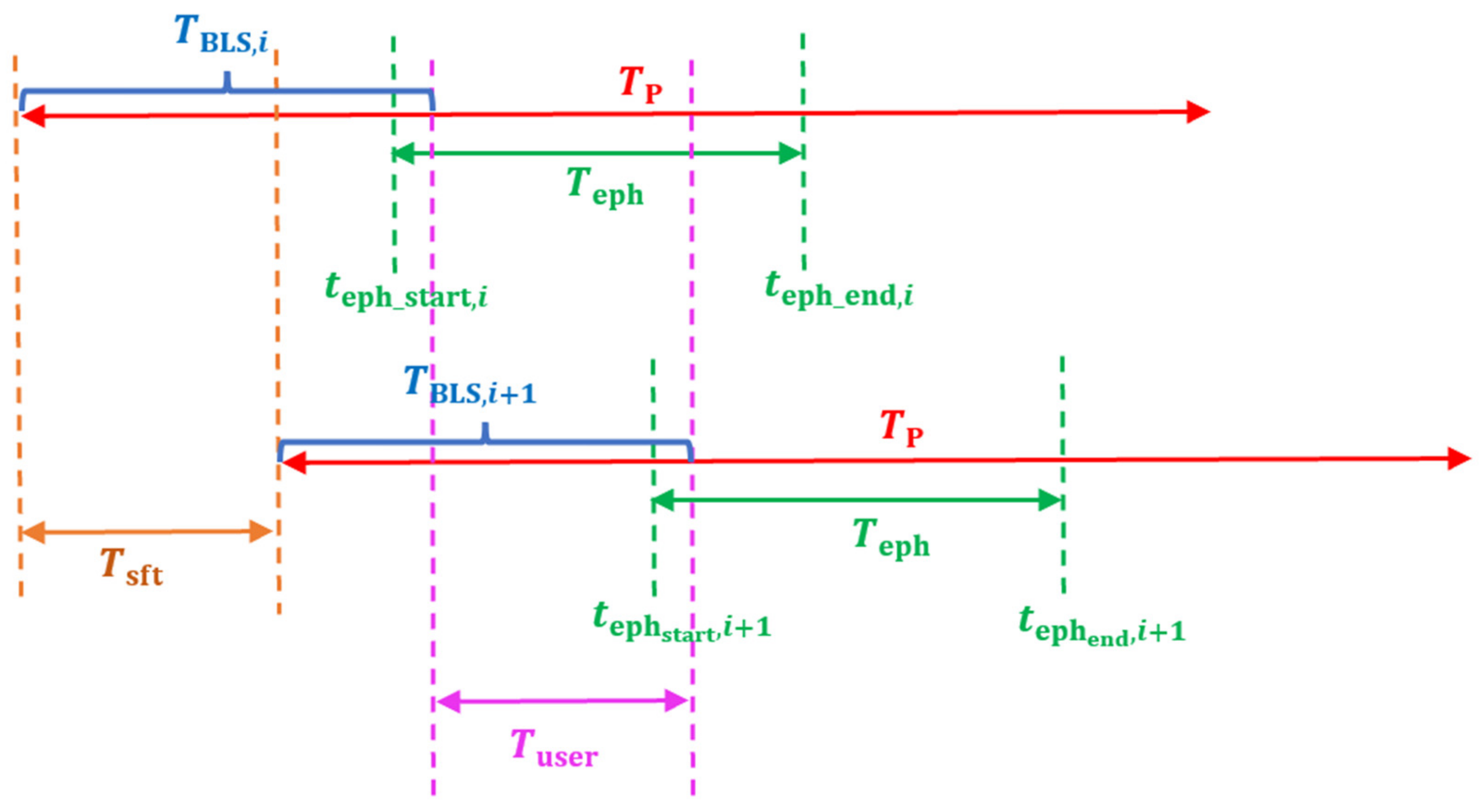
2.1. Near-Real-Time LEO Satellite POD with BLS Adjustment
2.2. Short-Term Orbit Prediction for Real-Time Applications
2.3. Ephemeris Fitting of the Predicted Orbits
3. Test Results
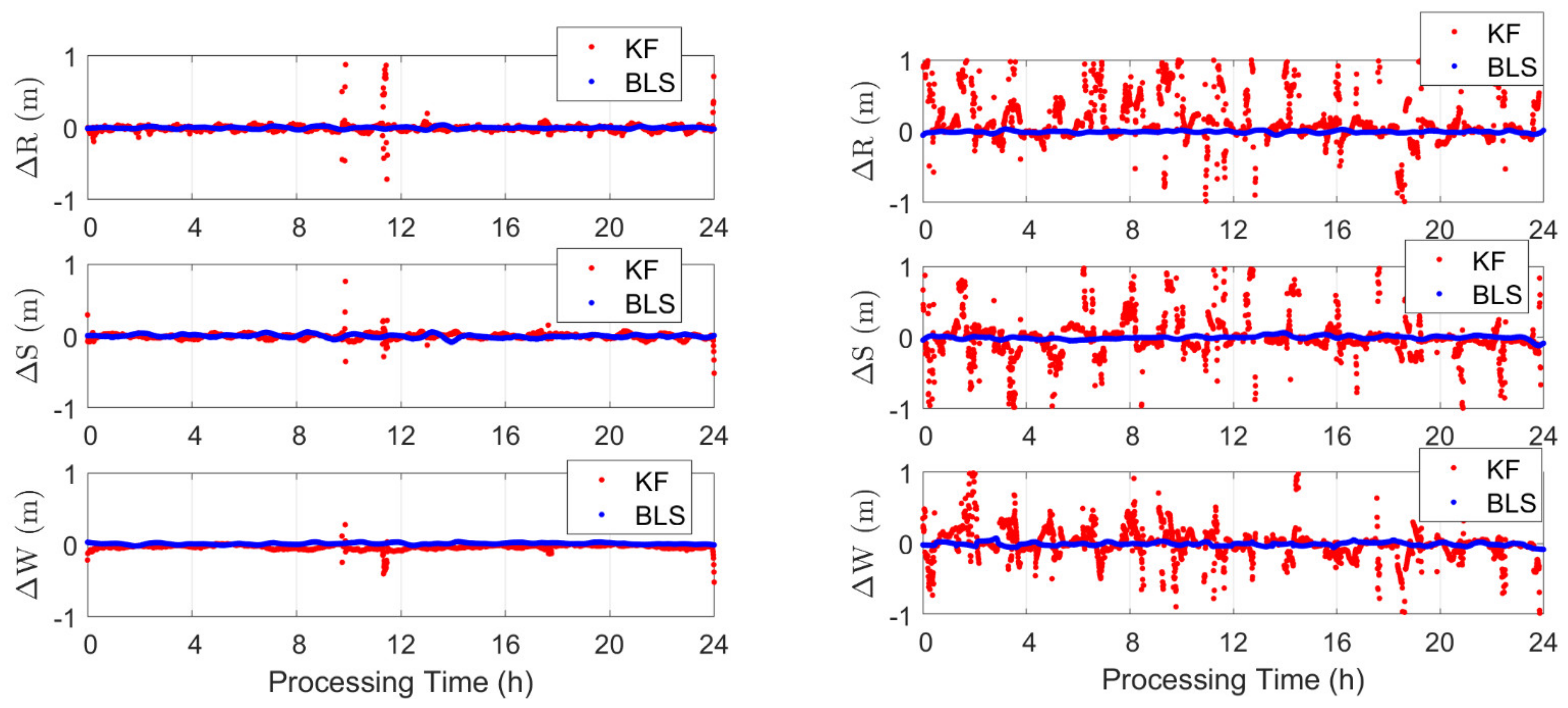
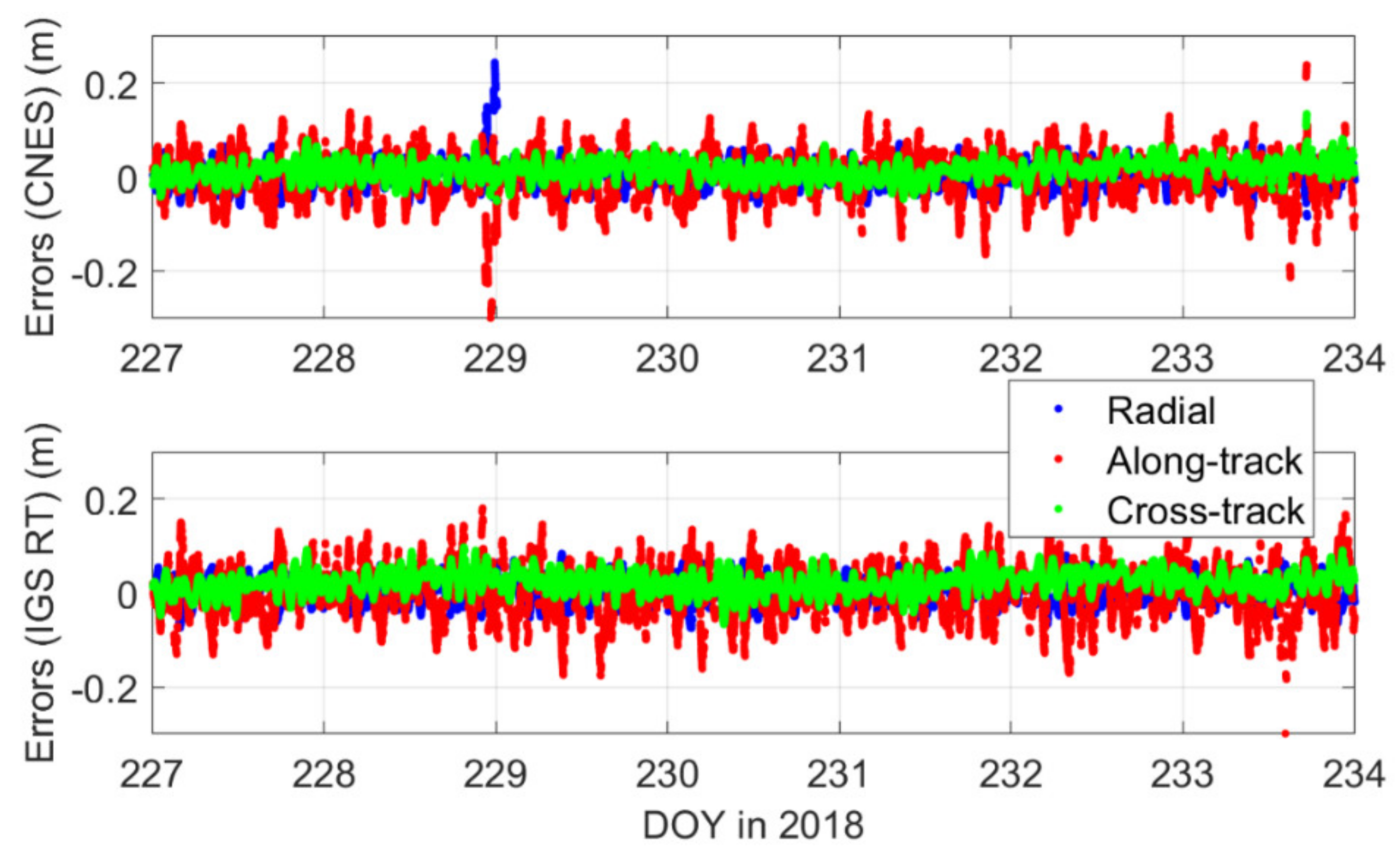
3.1. Near-Real-Time BLS POD Results
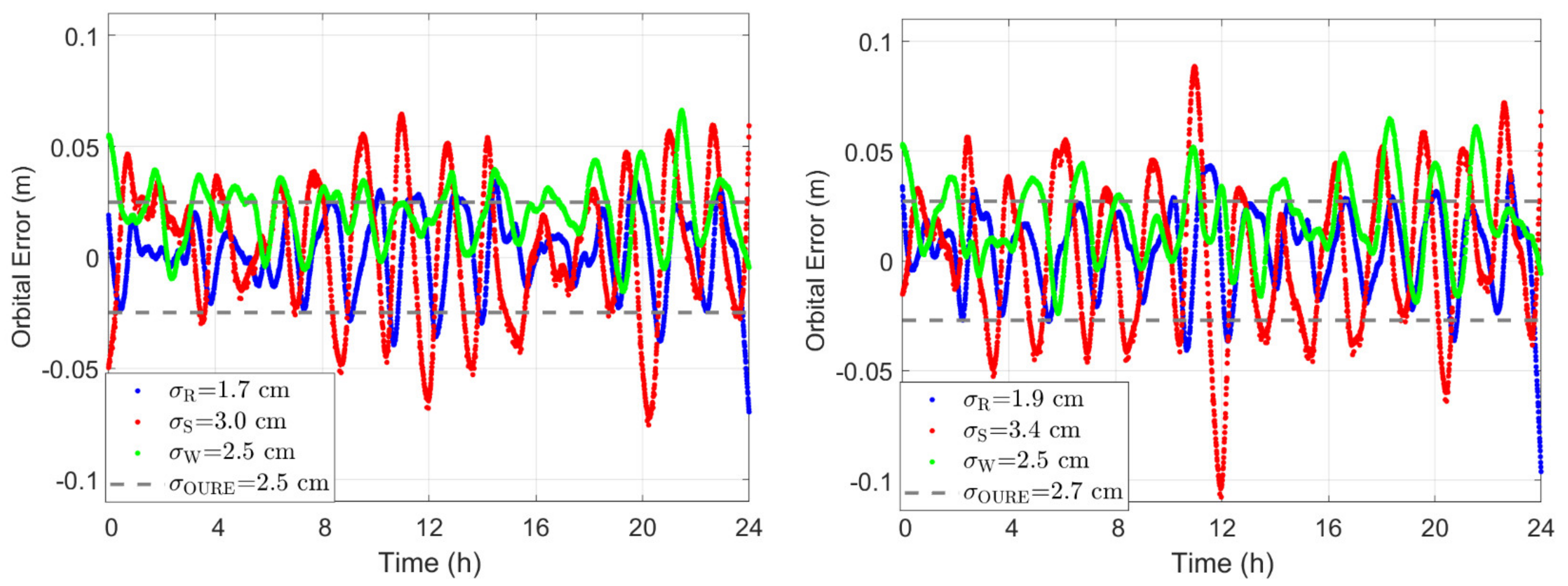
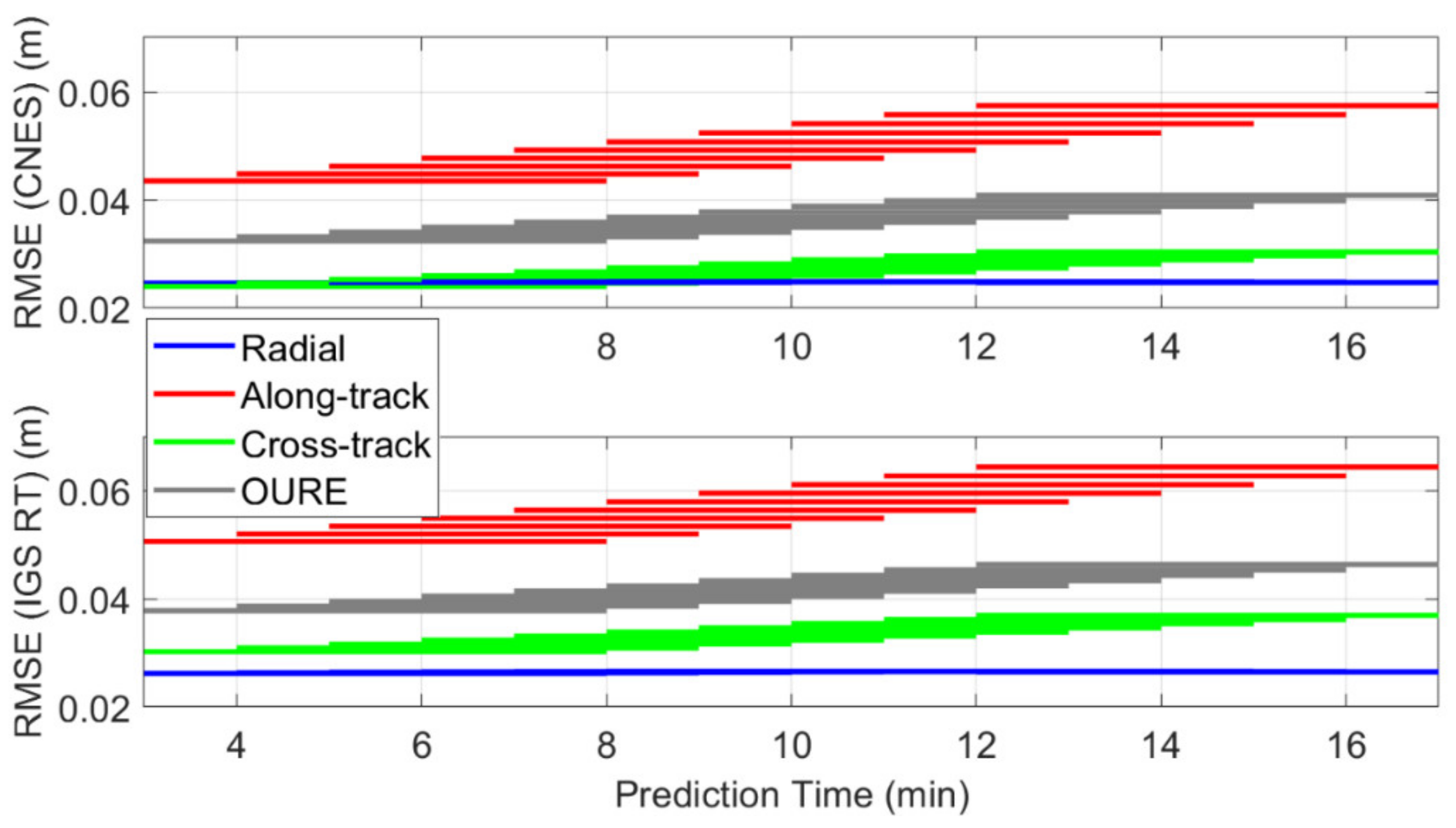
3.2. Real-Time Orbits Based on Short-Term Prediction
- 1)
- The prediction time, i.e., the sum of the BLS POD processing time () and the time shift between subsequent BLS POD processes (). Extending the prediction time by 9 min, as shown in Table 8, had increased the averaged OURE by 0.8 to 1.6 cm. The increase was especially large for satellites with low altitudes.
- 2)
- The orbital height. This factor has correlated influences with the prediction time on the real-time orbital accuracy. According to Table 8, compared to the 810 km Sentinel-3B, the GRACE C at 500 km had increased the OURE by about 4 mm at a short prediction window of 3–8 min, and by about 0.9–1.2 cm at a longer prediction window of 12 to 17 min.
- 3)
- The quality of the GNSS satellite and clock products, i.e., the near-real-time BLS POD accuracy. By using CNES and IGS high-precision real-time GNSS products, the OURE had varied by 5–8 mm. The variation could increase when using other real-time GNSS products with lower accuracies.
- 1)
- The already low orbital altitude had been further reduced in 2022. This led to increased influences of the mis-modeled air drag effects, which led to increased prediction errors.
- 2)
- As data sets in different years were used, the data status and the variation of the stochastic accelerations were also changed. These might lead to slight differences in the predictions.
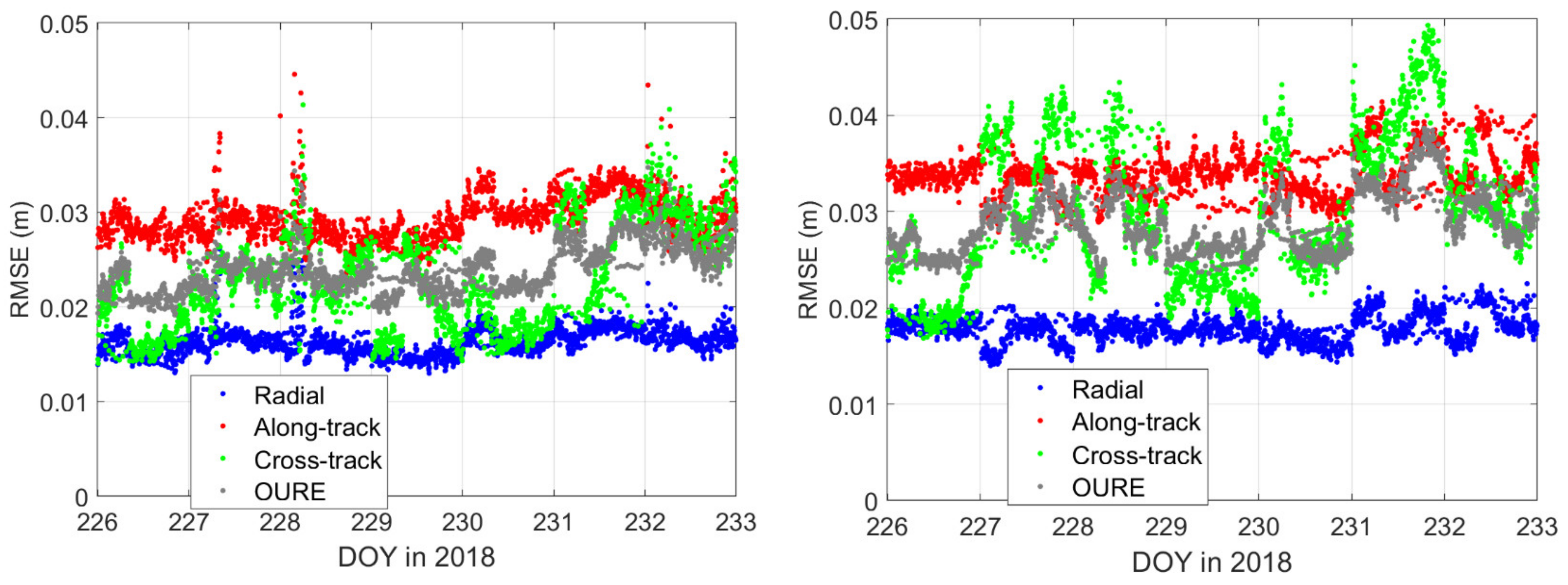
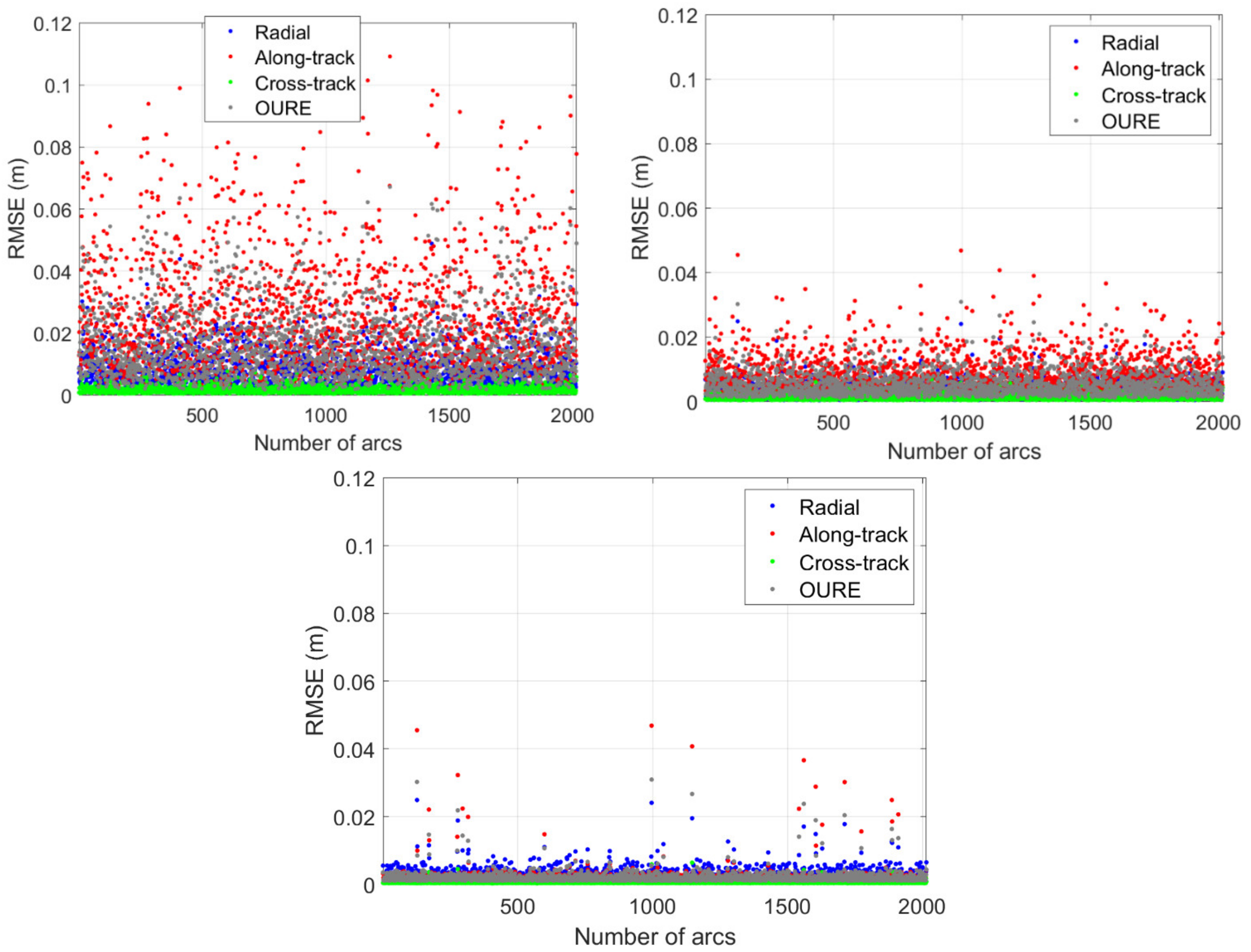
3.3. Ephemeris Fitting of the Real-Time Orbits
- 1)
- The orbital height
- 2)
- The number of the ephemeris parameters
- 3)
- The fitting interval
3.4. Total Error Budget
4. Discussions and Conclusions
- 1)
- Shortening the BLS processing time is essential, as it directly relates to the valid prediction time to be used in the real-time window. In our tests, for the same satellite, extending the BLS processing time from 3 to 12 min could increase the prediction OURE by 0.8 to 1.6 cm. Within this range, a larger increase is often observed for the lower LEO satellite GRACE C.
- 2)
- The orbital height plays an important role in the orbit prediction and ephemeris fitting, especially when the number of ephemeris parameters is low. Comparing the results of the 810 km height Sentinel-3B and the 500 km GRAEC C, for a long BLS processing time of 12 min, the increase in the OURE for the orbit prediction amounts to about 1 cm. For 16-parameter ephemeris fitting, the OURE of the fitting error itself has reached 1.5 cm.
- 3)
- Assuming ephemeris fitting with, e.g., 22 parameters and a short fitting interval of 10 min, the real-time orbital errors are dominated by the errors in the predicted orbits, where the along-track errors have the major contribution. In general, with a current modern processing unit limiting the BLS processing time to 5–6 min, a real-time OURE of 3–5 cm can be achieved when an appropriate prediction strategy is applied and when high-quality GNSS products are used.
- 4)
- It is suggested to study the best suitable prediction strategy for a specific LEO satellite within a specific time period, especially for low-altitude satellites. Otherwise, the prediction errors could increase.
- 5)
- In this study, two types of high-quality real-time GNSS products were used in the BLS POD process, i.e., the CNES real-time products and the IGS RTS products. The resulting differences in the POD showed that the CNES real-time GNSS products had delivered near-real-time orbits with better accuracy. However, the purpose of using these two different real-time GNSS products here is not to compare them, but to show that the GNSS orbits and clocks influence the LEO POD results, even when both products are of high accuracy. When GNSS products are only available at a lower accuracy, e.g., the predicted part of the IGS ultra-rapid products, the POD accuracy will correspondingly decrease.
- 6)
- This contribution addressed only the orbital contribution to the URE. For ground-based positioning users, the combined contribution of the orbital and clock errors is of actual concern. Although not further attempted in this paper, the method to determine real-time LEO satellite clocks, their accuracies, and their correlations with real-time orbits are topics that will be considered in our future work.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | three dimensional |
| APC | Antenna Phase Center |
| BLS | Batch Least-Squares |
| CNES | National Center for Space Studies |
| CoM | Center of Mass |
| DCB | Differential Code Bias |
| DLR | German Aerospace Center |
| EKF | Extended Kalman Filter |
| ESOC | European Space Operations Centre |
| GEO | Geostationary |
| GNSS | Global Navigation Satellite System |
| GPST | GPS Time |
| IGS RTS | International GNSS Service Real-Time Service |
| IF | Ionosphere-Free |
| JPL | Jet Propulsion Laboratory |
| KF | Kalman Filter |
| LEO | Low Earth Orbit |
| MEO | Medium Earth Orbit |
| O-C | Observed-Minus-Computed |
| OURE | Orbital User Range Error |
| PCO | Phase Center Offset |
| PCV | Phase Center Variation |
| PDOP | Position Dilution of Precision |
| PNT | Positioning, Navigation and Timing |
| POD | Precise Orbit Determination |
| PPP | Precise Point Positioning |
| PPP-RTK | Precise Point Positioning—Real-Time Kinematic |
| RAAN | Right Ascension of Ascending Node |
| RMS | Root Mean Square |
| RMSE | Root Mean Square Error |
| SRP | Solar Radiation Pressure |
| URE | User Range Error |
References
- Reid, T.G.R.; Neish, A.M.; Walter, T.; Enge, P.K. Broadband LEO constellations for navigation. Navig. J. Inst. Navig. 2018, 65, 205–220. [Google Scholar] [CrossRef]
- Baeza, V.M.; Lagunas, E.; Al-Hraishawi, H.; Chatzinotas, S. An Overview of Channel Models for NGSO Satellites. In Proceedings of the IEEE Vehicular Technology Conference 2022, London, UK, Beijing, China, 26–29 September 2022. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E. Around the world in a hundred minutes. In Satellite Orbits, 1st ed.; Springer: Berlin, Germany, 2000; pp. 1–13. [Google Scholar]
- Ge, H.; Li, B.; Ge, M.; Zang, N.; Nie, L.; Shen, Y.; Schuh, H. Initial assessment of precise point positioning with LEO enhanced global navigation satellite systems (LeGNSS). Remote Sens. 2018, 10, 984. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Ma, F.; Li, X.; Lv, H.; Bian, L.; Jiang, Z.; Zhang, X. LEO constellation-augmented multi-GNSS for rapid PPP convergence. J. Geod. 2018, 93, 749–764. [Google Scholar] [CrossRef]
- Li, M.; Xu, T.; Guan, M.; Gao, F.; Jiang, N. LEO-constellation-augmented multi-GNSS real-time PPP for rapid re-convergence in harsh environments. GPS Solut. 2022, 26, 29. [Google Scholar] [CrossRef]
- Wang, K.; El-Mowafy, A.; Wang, W.; Yang, L.; Yang, X. Integrity Monitoring of PPP-RTK Positioning; Part II: LEO Augmentation. Remote Sens. 2022, 14, 1599. [Google Scholar] [CrossRef]
- Faragher, R.; Ziebart, M. OneWeb LEO PNT: Progress or Risky Gamble? Inside GNSS, 28 September 2020. Available online: https://insidegnss.com/oneweb-leo-pnt-progress-or-risky-gamble/ (accessed on 28 June 2021).
- Lawrence, D.; Cobb, H.S.; Gutt, G.; O’Connor, M.; Reid, T.G.R.; Walter, T.; Whelan, D. Innovation: Navigation from LEO. GPS World, 30 June 2017. Available online: https://www.gpsworld.com/innovation-navigation-from-leo/ (accessed on 10 October 2022).
- Jia, Y.; Bian, L.; Cao, Y.; Meng, Y.; Zhang, L. Design and Analysis of Beidou Global Integrity System Based on LEO Augmentation. In Lecture Notes in Electrical Engineering, Proceedings of the China Satellite Navigation Conference (CSNC) 2020 Proceedings: Volume II, CSNC 2020, Chengdu, China, 22–25 November 2020; Sun, J., Yang, C., Xie, J., Eds.; Springer: Singapore, 2020; Volume 651, pp. 624–633. [Google Scholar] [CrossRef]
- Michalak, G.; Glaser, S.; Neumayer, K.H.; König, R. Precise orbit and Earth parameter determination supported by LEO satellites, inter-satellite links and synchronized clocks of a future GNSS. Adv. Space Res. 2021, 12, 4753–4782. [Google Scholar] [CrossRef]
- Yang, L. The Centispace-1: A LEO Satellite-Based Augmentation System. In Proceedings of the 14th Meeting of the International Committee on Global Navigation Satellite Systems, Bengaluru, India, 8–13 December 2019. [Google Scholar]
- Hauschild, A.; Tegedor, J.; Montenbruck, O.; Visser, H.; Markgraf, M. Precise onboard orbit determination for LEO satellites with real-time orbit and clock corrections. In Proceedings of the ION GNSS+ 2016, Institute of Navigation, Portland, OR, USA, 12–16 September 2016; pp. 3715–3723. [Google Scholar]
- Wang, Z.; Li, Z.; Wang, N.; Hoque, M.; Wang, L.; Li, R.; Zhang, Y.; Yuan, H. Real-time precise orbit determination for LEO between kinematic and reduced-dynamic with ambiguity resolution. Aerospace 2022, 9, 25. [Google Scholar] [CrossRef]
- Takasu, T. Real-time PPP with RTKLIB and IGS real-time satellite orbit and clock. In Proceedings of the IGS Workshop 2010, Newcastle upon Tyne, UK, 28 June–2 July 2010. [Google Scholar]
- Laurichesse, D.; Cerri, L.; Berthias, J.P.; Mercier, F. Real time precise GPS constellation and clocks estimation by means of a Kalman filter. In Proceedings of the ION GNSS+ 2013, Institute of Navigation, Nashville, TN, USA, 16–20 September 2013; pp. 1155–1163. [Google Scholar]
- Wen, H.Y.; Kruizinga, G.; Paik, M.; Landerer, F.; Bertiger, W.; Sakumura, C.; Bandikova, T.; Mccullough, C. Gravity Recovery and Climate Experiment Follow-On (GRACE-FO) Level-1 Data Product User Handbook. JPL D-56935 (URS270772), 11 September 2019. Available online: https://podaac-tools.jpl.nasa.gov/drive/files/allData/gracefo/docs/GRACE-FO_L1_Handbook.pdf (accessed on 26 October 2022).
- Allahvirdi-Zadeh, A.; Wang, K.; El-Mowafy, A. POD of small LEO satellites based on precise real-time MADOCA and SBAS-aided PPP corrections. GPS Solut. 2021, 25, 31. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- RTS. RTS Contributors + Providers, Real-Time Analysis Centers. 2022. Available online: https://igs.org/rts/contributors/#real-time-analysis-centers (accessed on 10 October 2022).
- Wang, K.; El-Mowafy, A.; Yang, X. URE and URA for predicted LEO satellite orbits at different altitudes. Adv. Space Res. 2022, 70, 2412–2423. [Google Scholar] [CrossRef]
- ESA. SENTINEL-3, ESA’s Global Land and Ocean Mission for GMES Operational Services. European Space Agency. 2012. Available online: https://sentinel.esa.int/documents/247904/351187/S3_SP-1322_3.pdf (accessed on 11 October 2022).
- Fernández, M. Sentinel-3 Properties for GPS POD, Copernicus Sentinel-1, -2 and -3 Precise Orbit Determination Service (SENTINELSPOD), GMV-GMESPOD-TN-0027, Version 1.7. 2019. Available online: https://sentinels.copernicus.eu/documents/247904/3372613/Sentinel-3-GPS-POD-Properties.pdf (accessed on 11 October 2022).
- Wang, K.; Allahvirdi-Zadeh, A.; El-Mowafy, A.; Gross, J.N. A Sensitivity Study of POD Using Dual-Frequency GPS for CubeSats Data Limitation and Resources. Remote Sens. 2020, 12, 2107. [Google Scholar] [CrossRef]
- Beutler, G. Variational equations. In Methods of Celestial Mechanics; Astronomy and Astrophysics Library; Springer: Berlin/Heidelberg, Germany, 2005; pp. 175–207. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. An Earth gravitational model to degree 2160: EGM2008. In Proceedings of the EGU 2008, Vienna, Austria, 13–18 April 2008. [Google Scholar]
- Standish, E.M. JPL Planetary and Lunar Ephemerides, DE405/LE405. JPL IOM 312, F-98–048. 1998. Available online: https://naif.jpl.nasa.gov/pub/naif/generic_kernels/spk/planets/a_old_versions/de405.cmt (accessed on 26 October 2022).
- Petit, G.; Luzum, B. IERS Conventions; IERS Technical Note, 36; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010; 179p, ISBN 3–89888-989–6. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Chen, L.; Jiao, W.; Huang, X.; Geng, C.; Ai, L.; Lu, L.; Hu, Z. Study on signal-in-space errors calculation method and statistical characterization of BeiDou navigation satellite system. In Lecture Notes in Electrical Engineering, Proceedings of the China Satellite Navigation Conference (CSNC), Wuhan, China, 15–17 May 2013; Sun, J., Jiao, W., Wu, H., Shi, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 243. [Google Scholar]
- Hintz, G.R. Survey of orbit element sets. J. Guid. Control. Dyn. 2008, 31, 785–790. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, X.; Zhang, Q.; Liu, J. Design and validation of broadcast ephemeris for low Earth orbit satellites. GPS Solut. 2018, 22, 54. [Google Scholar] [CrossRef]
- Cui, X.; Jiao, W.; Jia, X.; He, T. Comparisons of two kinds of GPS broadcast ephemeris parameter algorithms. Chin. J. Space Sci. 2006, 26, 382–387. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acceleration Terms | Models and Parameters Used |
|---|---|
| Gravitational Attraction of the Earth | EGM2008 (Earth Potential Degree: 120) [26] |
| Gravitational Attractions of other planets | Ephemeris from JPL DE405 [27] |
| Solid Earth and Pole Tides | IERS 2010 [28] |
| Ocean Tides | FES2004 [29] |
| Satellite | Fitting Time (h) | Keplerian Elements | SRP | Stochastic Velocity Pulses |
|---|---|---|---|---|
| Sentinel-3B | 4 | Yes (6) | Yes (9) | None |
| GRACE C | 12 | Yes (6) | Yes (9) | Every 1 h |
| Number of Parameters | Estimable Ephemeris Parameters | |
|---|---|---|
| Basic | Additional | |
| 16 | -- | |
| 18 | ||
| 20 | ||
| 22 | ||
| Satellite | GNSS Real-Time Products | |||||
|---|---|---|---|---|---|---|
| Sentinel-3B | CNES | 1.6 (1.8) | 2.9 (3.0) | 2.3 (2.4) | 2.4 (2.5) | 4.1 (4.2) |
| IGS RTS | 1.8 (1.8) | 3.4 (3.4) | 3.1 (3.1) | 2.9 (2.9) | 4.9 (4.9) | |
| GRACE C | CNES | 1.2 (1.2) | 2.2 (2.3) | 1.9 (1.9) | 1.9 (1.9) | 3.2 (3.2) |
| IGS RTS | 1.4 (1.4) | 2.6 (2.7) | 2.0 (2.0) | 2.1 (2.2) | 3.5 (3.6) |
| Satellite | GNSS Real-Time Products | |||||
|---|---|---|---|---|---|---|
| GRACE C | CNES | 1.7 (1.7) | 1.9 (2.0) | 2.3 (2.3) | 2.0 (2.0) | 3.4 (3.5) |
| IGS RTS | 1.7 (1.7) | 2.0 (2.0) | 2.4 (2.4) | 2.1 (2.1) | 3.5 (3.5) |
| Server Number | Model | Operating Frequency | Processing Time |
|---|---|---|---|
| 1 | Intel(R) Xeon(R) | 2.7 GHz | 5–6 min |
| 2 | Intel(R) Xeon(R) | 1.9 GHz | 11–12 min |
| Satellite | GNSS Real-Time Products | |||||
|---|---|---|---|---|---|---|
| Sentinel-3B | CNES | 2.5 (2.6) | 4.8 (5.4) | 2.6 (2.6) | 3.5 (3.8) | 6.0 (6.5) |
| IGS RTS | 2.6 (2.6) | 5.5 (5.5) | 3.2 (3.2) | 4.0 (4.1) | 6.9 (6.9) | |
| GRACE C | CNES | 2.9 (3.2) | 5.5 (6.3) | 2.6 (2.6) | 4.0 (4.5) | 6.7 (7.8) |
| IGS RTS | 3.3 (3.5) | 6.6 (7.0) | 2.7 (2.7) | 4.7 (5.0) | 7.6 (8.2) |
| Prediction Time Window (min) | Sentinel-3B (CNES) (cm) | Sentinel-3B (IGS RTS) (cm) | GRACE C (CNES) (cm) | GRACE C (IGS RTS) (cm) |
|---|---|---|---|---|
| 3–8 | 3.2 (3.6) | 3.8 (3.8) | 3.6 (4.0) | 4.2 (4.4) |
| 4–9 | 3.3 (3.7) | 3.9 (3.9) | 3.7 (4.2) | 4.4 (4.6) |
| 5–10 | 3.4 (3.7) | 4.0 (4.0) | 3.9 (4.4) | 4.5 (4.8) |
| 6–11 | 3.5 (3.8) | 4.0 (4.1) | 4.0 (4.5) | 4.7 (5.0) |
| 7–12 | 3.6 (3.9) | 4.1 (4.2) | 4.2 (4.7) | 5.0 (5.1) |
| 8–13 | 3.7 (4.0) | 4.2 (4.3) | 4.4 (4.9) | 5.1 (5.3) |
| 9–14 | 3.8 (4.1) | 4.3 (4.4) | 4.5 (5.1) | 5.3 (5.5) |
| 10–15 | 3.9 (4.2) | 4.4 (4.5) | 4.7 (5.3) | 5.4 (5.7) |
| 11–16 | 4.0 (4.2) | 4.5 (4.5) | 4.9 (5.4) | 5.6 (5.9) |
| 12–17 | 4.1 (4.3) | 4.6 (4.7) | 5.0 (5.6) | 5.8 (6.1) |
| Prediction Time Window (min) | GRACE C (CNES) (cm) | GRACE C (IGS RTS) (cm) |
|---|---|---|
| 3–8 | 4.9 (5.1) | 4.9 (5.1) |
| 4–9 | 5.2 (5.4) | 5.2 (5.4) |
| 5–10 | 5.4 (5.6) | 5.5 (5.6) |
| 6–11 | 5.7 (5.9) | 5.7 (5.9) |
| 7–12 | 6.0 (6.2) | 6.0 (6.2) |
| 8–13 | 6.3 (6.5) | 6.3 (6.5) |
| 9–14 | 6.6 (6.8) | 6.6 (6.8) |
| 10–15 | 6.9 (7.1) | 7.0 (7.1) |
| 11–16 | 7.2 (7.4) | 7.3 (7.4) |
| 12–17 | 7.5 (7.7) | 7.7 (7.8) |
| RMSE/OURE | Sentinel-3B (CNES) (cm) | Sentinel-3B (IGS RTS) (cm) | GRACE C (CNES) (cm) | GRACE C (IGS RTS) (cm) |
|---|---|---|---|---|
| 16 Parameters | ||||
| Radial | 1.0 (1.0) | 1.0 (1.0) | 2.2 (2.2) | 2.2 (2.2) |
| Along-track | 3.0 (3.0) | 3.0 (3.0) | 5.2 (5.2) | 5.2 (5.2) |
| Cross-track | 0.2 (0.2) | 0.2 (0.2) | 0.5 (0.5) | 0.5 (0.5) |
| OURE | 1.9 (1.9) | 1.9 (1.9) | 3.4 (3.4) | 3.4 (3.4) |
| 18 Parameters | ||||
| Radial | 0.4 (0.4) | 0.4 (0.4) | 1.0 (1.0) | 1.0 (1.0) |
| Along-track | 1.0 (1.0) | 1.0 (1.0) | 2.1 (2.1) | 2.1 (2.1) |
| Cross-track | 0.2 (0.2) | 0.2 (0.2) | 0.5 (0.5) | 0.5 (0.5) |
| OURE | 0.6 (0.6) | 0.6 (0.6) | 1.4 (1.4) | 1.4 (1.4) |
| 22 Parameters | ||||
| Radial | 0.3 (0.3) | 0.3 (0.3) | 0.9 (0.9) | 0.9 (0.9) |
| Along-track | 0.4 (0.4) | 0.4 (0.4) | 1.2 (1.2) | 1.2 (1.2) |
| Cross-track | 0.1 (0.1) | 0.1 (0.1) | 0.2 (0.2) | 0.2 (0.2) |
| OURE | 0.3 (0.3) | 0.3 (0.3) | 0.9 (0.9) | 0.9 (0.9) |
| Error Type | OURE (cm) | |||||
|---|---|---|---|---|---|---|
| 5–10 min | 6–11 min | 7–12 min | 8–13 min | 9–14 min | 10–15 min | |
| Sentinel-3B (CNES) | ||||||
| Prediction error | 3.4 (3.7) | 3.5 (3.8) | 3.6 (3.9) | 3.7 (4.0) | 3.8 (4.1) | 3.9 (4.2) |
| Fitting error | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) |
| Total error | 3.4 (3.8) | 3.5 (3.9) | 3.6 (3.9) | 3.7 (4.0) | 3.8 (4.1) | 3.9 (4.2) |
| Sentinel-3B (IGS RTS) | ||||||
| Prediction error | 4.0 (4.0) | 4.0 (4.1) | 4.1 (4.2) | 4.2 (4.3) | 4.3 (4.4) | 4.4 (4.5) |
| Fitting error | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) | 0.2 (0.3) |
| Total error | 4.0 (4.0) | 4.1 (4.1) | 4.1 (4.2) | 4.2 (4.3) | 4.3 (4.4) | 4.4 (4.5) |
| GRACE C (CNES) | ||||||
| Prediction error | 3.9 (4.4) | 4.0 (4.5) | 4.2 (4.7) | 4.4 (4.9) | 4.5 (5.1) | 4.7 (5.3) |
| Fitting error | 0.6 (0.9) | 0.6 (0.8) | 0.6 (0.8) | 0.6 (0.8) | 0.6 (0.8) | 0.6 (0.9) |
| Total error | 4.0 (4.4) | 4.1 (4.6) | 4.3 (4.8) | 4.4 (5.0) | 4.6 (5.1) | 4.8 (5.3) |
| GRACE C (IGS RTS) | ||||||
| Prediction error | 4.5 (4.8) | 4.7 (5.0) | 5.0 (5.1) | 5.1 (5.3) | 5.3 (5.5) | 5.4 (5.7) |
| Fitting error | 0.6 (0.9) | 0.6 (0.8) | 0.6 (0.8) | 0.6 (0.9) | 0.6 (0.8) | 0.6 (0.9) |
| Total error | 4.6 (4.8) | 4.8 (5.0) | 5.0 (5.2) | 5.1 (5.4) | 5.3 (5.6) | 5.5 (5.8) |
| Error Type | OURE (cm) | |||||
|---|---|---|---|---|---|---|
| 5–10 min | 6–11 min | 7–12 min | 8–13 min | 9–14 min | 10–15 min | |
| GRACE C (CNES) in August 2022 | ||||||
| Prediction error | 5.4 (5.6) | 5.7 (5.9) | 6.0 (6.2) | 6.3 (6.5) | 6.6 (6.8) | 6.9 (7.1) |
| Fitting error | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) |
| Total error | 5.5 (5.7) | 5.8 (5.9) | 6.0 (6.2) | 6.3 (6.5) | 6.6 (6.8) | 6.9 (7.1) |
| GRACE C (IGS RTS) in August 2022 | ||||||
| Prediction error | 5.5 (5.6) | 5.7 (5.9) | 6.0 (6.2) | 6.3 (6.5) | 6.6 (6.8) | 7.0 (7.1) |
| Fitting error | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) | 0.6 (0.9) |
| Total error | 5.5 (5.7) | 5.8 (5.9) | 6.0 (6.2) | 6.3 (6.5) | 6.6 (6.8) | 6.9 (7.1) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Liu, J.; Su, H.; El-Mowafy, A.; Yang, X. Real-Time LEO Satellite Orbits Based on Batch Least-Squares Orbit Determination with Short-Term Orbit Prediction. Remote Sens. 2023, 15, 133. https://doi.org/10.3390/rs15010133
Wang K, Liu J, Su H, El-Mowafy A, Yang X. Real-Time LEO Satellite Orbits Based on Batch Least-Squares Orbit Determination with Short-Term Orbit Prediction. Remote Sensing. 2023; 15(1):133. https://doi.org/10.3390/rs15010133
Chicago/Turabian StyleWang, Kan, Jiawei Liu, Hang Su, Ahmed El-Mowafy, and Xuhai Yang. 2023. "Real-Time LEO Satellite Orbits Based on Batch Least-Squares Orbit Determination with Short-Term Orbit Prediction" Remote Sensing 15, no. 1: 133. https://doi.org/10.3390/rs15010133