
Adaptive Subspace Signal Detection in Structured Interference Plus Compound Gaussian Sea Clutter


Abstract
:
1. Introduction
2. Problem Formula
3. Adaptive Persymmetric Detectors Design
3.1. Adaptive Two-Step Persymmetric GLRT
3.2. Adaptive Two-Step Persymmetric Rao Test
3.3. Adaptive Two-Step Persymmetric Wald Test
4. Performance Assessment
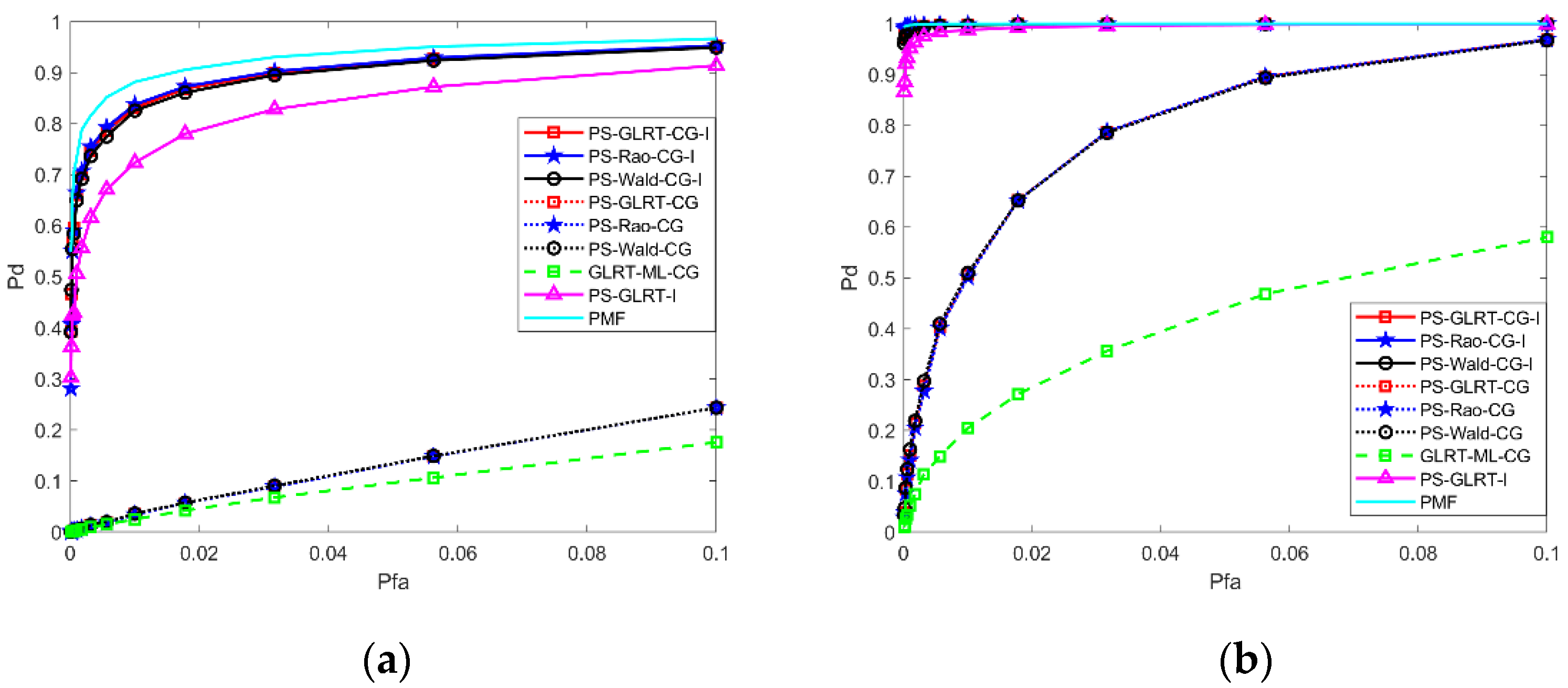
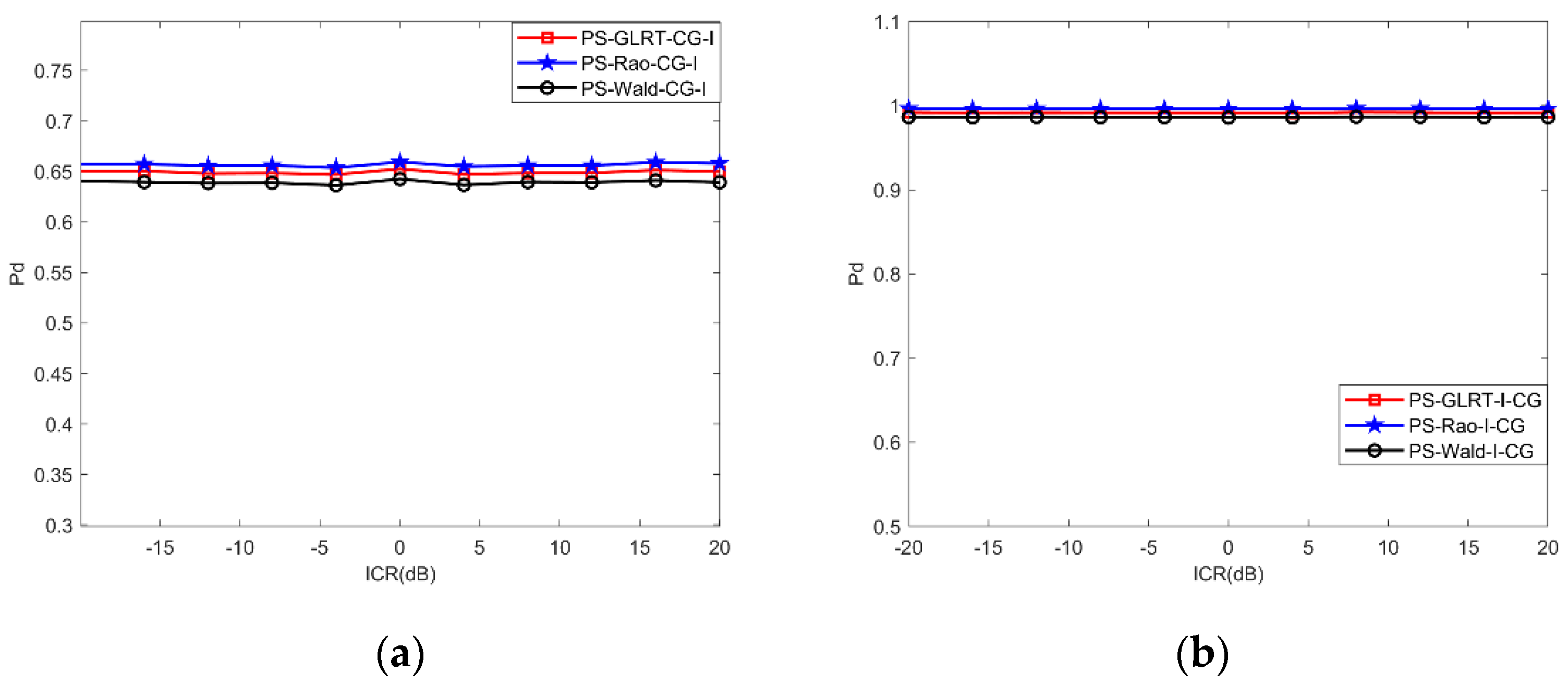
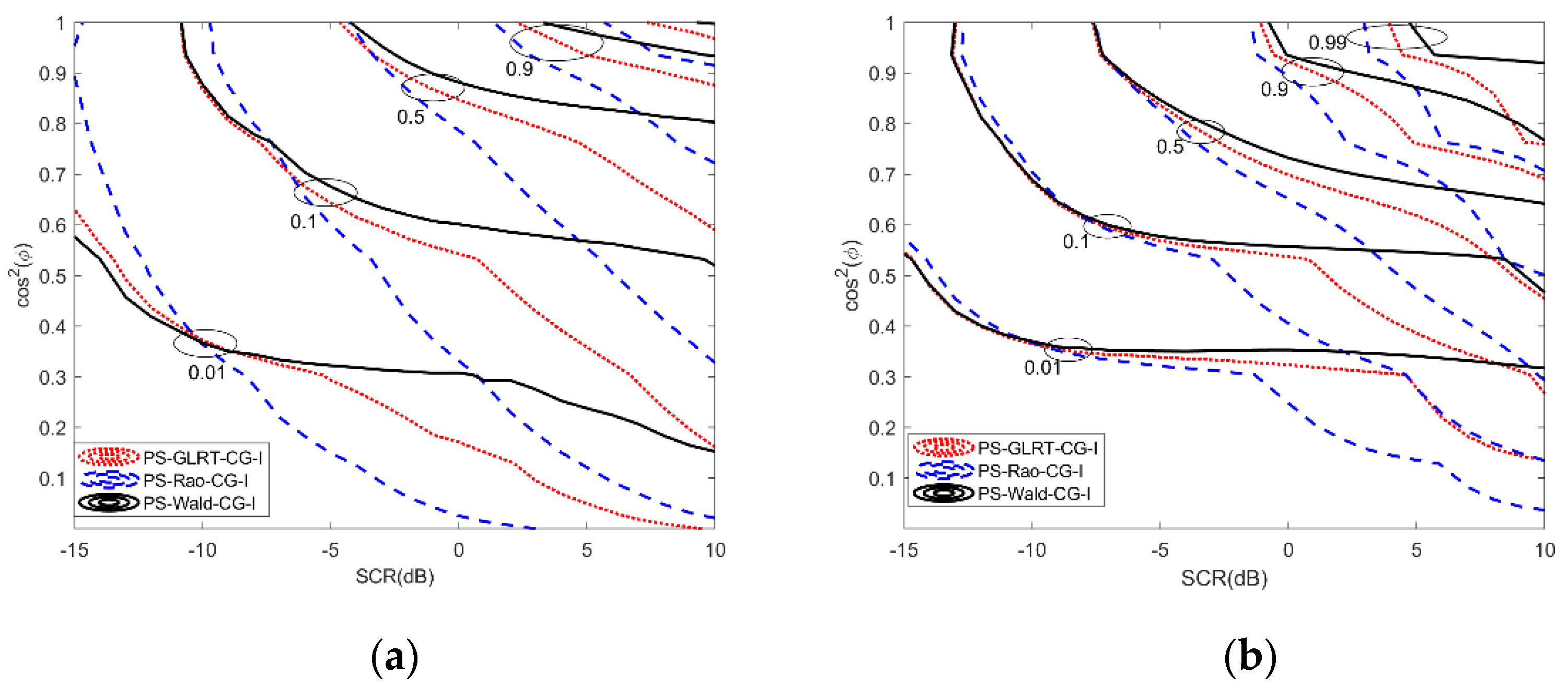
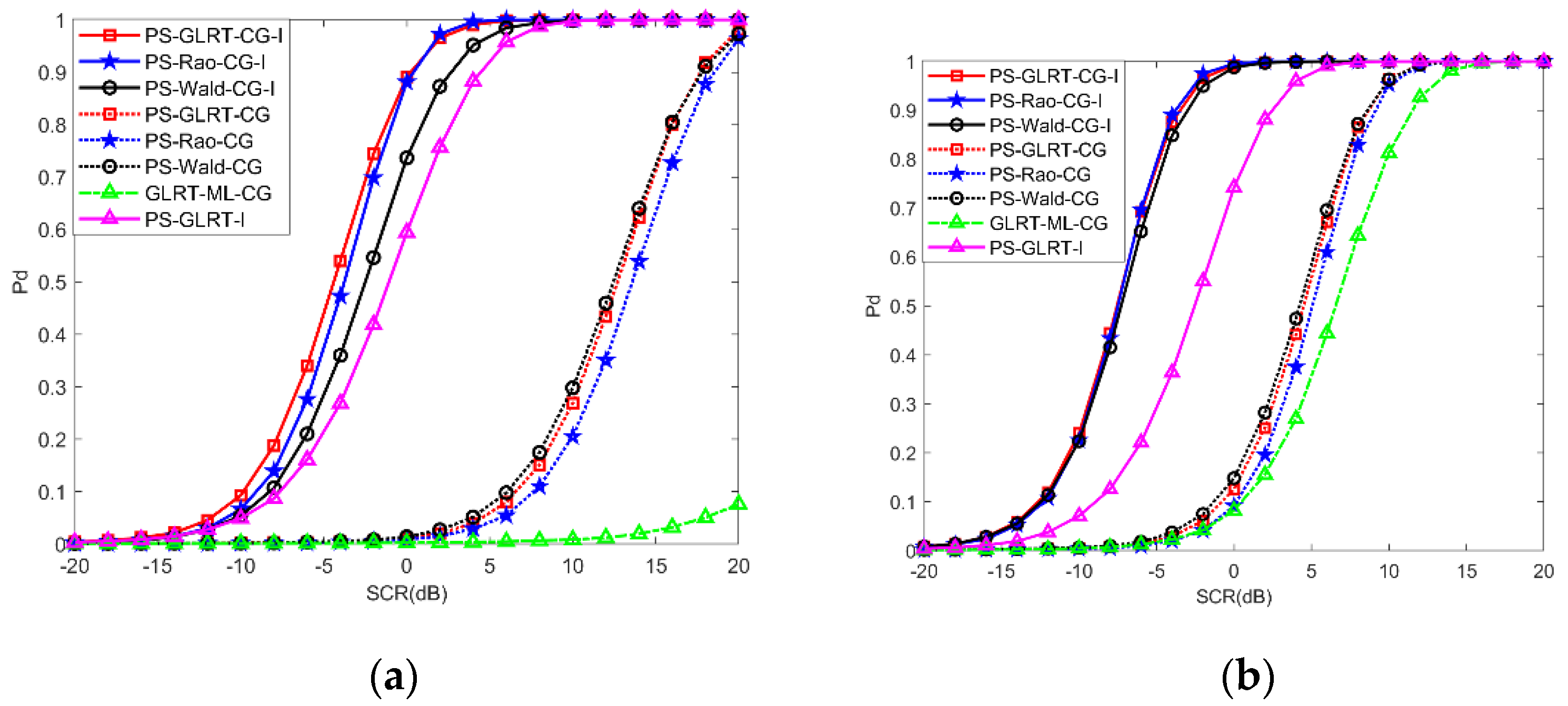
4.1. Simulated Data Results
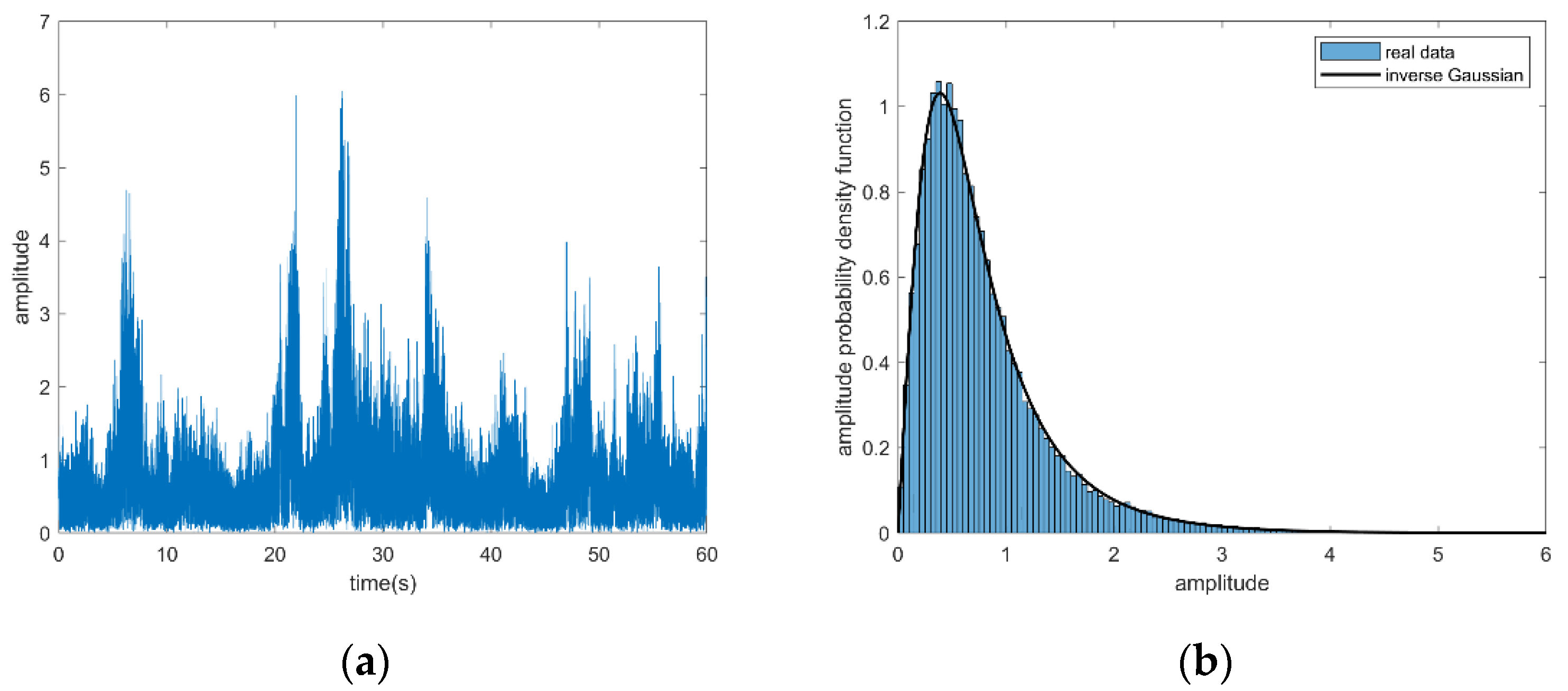
4.2. Real Data Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Rong, Y.; Aubry, A.; De Maio, A.; Tang, M. Adaptive radar detection in Gaussian interference using clutter-free training data. IEEE Trans. Signal Process. 2022, 70, 978–993. [Google Scholar] [CrossRef]
- Bidon, S.; Besson, O.; Tourneret, J. A Bayesian approach to adaptive detection in nonhomogeneous environments. IEEE Trans. Signal Process. 2008, 56, 205–217. [Google Scholar] [CrossRef] [Green Version]
- Kelly, E.J. An adaptive detection algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, 22, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Li, H.; Himed, B. Adaptive subspace tests for multichannel signal detection in auto-regressive disturbance. IEEE Trans. Signal Process. 2018, 66, 5577–5587. [Google Scholar] [CrossRef]
- Park, H.-R.; Li, J.; Wang, H. Polarization-space-time domain generalized likelihood ratio detection of radar targets. Signal Process. 1995, 41, 153–164. [Google Scholar] [CrossRef]
- Kraut, S.; Scharf, L.L. Adaptive subspace detectors. IEEE Trans. Signal Process. 2001, 49, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Liu, W.; Chen, B.; Liu, H.; Li, H.; Hao, C. Modified Rao test for multichannel adaptive signal detection. IEEE Trans. Signal Process. 2016, 64, 714–725. [Google Scholar] [CrossRef]
- Wang, Z.; Li, M.; Chen, H.; Zuo, L.; Zhang, P.; Wu, Y. Adaptive detection of a subspace signal in signal-dependent interference. IEEE Trans. Signal Process. 2017, 65, 4812–4820. [Google Scholar] [CrossRef]
- Gini, F.; Farina, A. Vector subspace detection in compound-Gaussian clutter. Part I: Survey and new results. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 1295–1311. [Google Scholar] [CrossRef]
- Wang, Z. Modified Rao test for distributed target detection in interference and noise. Signal Process. 2020, 172. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Li, H.; Himed, B. Detection with target-induced subspace interference. IEEE Signal Process. Lett. 2012, 19, 403–406. [Google Scholar] [CrossRef]
- Bandiera, F.; Ricci, G. Adaptive detection and interference rejection of multiple point-like radar targets. IEEE Trans. Signal Process. 2006, 54, 4510–4518. [Google Scholar] [CrossRef]
- Besson, O. Detection in the presence of surprise or undernulled interference. IEEE Signal Process. Lett. 2007, 14, 352–354. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Liu, W.; Liu, J.; Tang, P.; Hao, C. Adaptive subspace detection based on gradient test for orthogonal interference. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: Piscatway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Orlando, D. On the statistical invariance for adaptive radar detection in partially homogeneous disturbance plus structured interference. IEEE Trans. Signal Process. 2017, 65, 1222–1234. [Google Scholar] [CrossRef]
- Liu, W.; Liu, J.; Li, H.; Du, Q.; Wang, Y.-L. Multichannel signal detection based on Wald test in subspace interference and Gaussian noise. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1370–1381. [Google Scholar] [CrossRef]
- Bandiera, F.; De Maio, A.; Greco, A.S.; Ricci, G. Adaptive radar detection of distributed targets in homogeneous and partially homogeneous noise plus subspace interference. IEEE Trans. Signal Process. 2007, 55, 1223–1237. [Google Scholar] [CrossRef]
- Mao, L.; Gao, Y.; Yan, S.; Xu, L. Persymmetric subspace detection in structured interference and non-homogeneous disturbance. IEEE Signal Process. Lett. 2019, 26, 928–932. [Google Scholar] [CrossRef]
- Gao, Y.; Liao, G.; Liu, W. High-resolution radar detection in interference and nonhomogeneous noise. IEEE Signal Process. Lett. 2016, 23, 1359–1363. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Liu, J. Persymmetric detection of radar targets in nonhomogeneous and non-Gaussian sea clutter. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–9. [Google Scholar] [CrossRef]
- Song, C.; Wang, B.; Xiang, M.; Wang, Z.; Xu, W.; Sun, X. A novel post-doppler parametric adaptive matched filter for airborne multichannel Radar. Remote Sens. 2020, 12, 4017. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, Y.; Wu, H.; Wang, H. Heterogeneous clutter suppression for airborne radar STAP based on matrix manifolds. Remote Sens. 2021, 13, 3195. [Google Scholar] [CrossRef]
- Pascal, F.; Chitour, Y.; Ovarlez, J.; Forster, P.; Larzabal, P. Covariance structure maximum-likelihood estimates in compound Gaussian noise: Existence and algorithm analysis. IEEE Trans. Signal Process. 2008, 56, 34–48. [Google Scholar] [CrossRef] [Green Version]
- Gini, F.; Montanari, M.; Verrazzani, L. Estimation of chirp radar signals in compound-Gaussian clutter: A cyclostationary approach. IEEE Trans. Signal Process. 2000, 48, 1029–1039. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Orlando, D.; Pallotta, L. On the maximal invariant statistic for adaptive radar detection in partially homogeneous disturbance with persymmetric covariance. IEEE Signal Process. Lett. 2016, 23, 1830–1834. [Google Scholar] [CrossRef]
- Liu, J.; Liu, W.; Tang, B.; Zheng, J.; Xu, S. Distributed target detection exploiting persymmetry in Gaussian clutter. IEEE Trans. Signal Process. 2019, 67, 1022–1033. [Google Scholar] [CrossRef]
- Pailloux, G.; Forster, P.; Ovarlez, J.; Pascal, F. Persymmetric adaptive radar detectors. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2376–2390. [Google Scholar] [CrossRef]
- Shuai, X.; Kong, L.; Yang, J. Performance analysis of GLRT-based adaptive detector for distributed targets in compound-Gaussian clutter. Signal Process. 2010, 90, 16–23. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G.; Li, M. Adaptive detection of distributed target in the presence of signal mismatch in compound Gaussian clutter. Digit. Signal Process. 2020, 102, 102755. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory, Part IV: Optimum Array Processing; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Sangston, K.J.; Gini, F.; Greco, M.V.; Farina, A. Structures for radar detection in compound Gaussian clutter. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 445–458. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Shui, P. Near-optimum coherent CFAR detection of radar targets in compound-Gaussian clutter with inverse Gaussian texture. Signal Process. 2020, 166, 107236. [Google Scholar] [CrossRef]
- The McMaster IPIX Radar Sea Clutter Database. Available online: http://soma.ece.mcmaster.ca/ipix/ (accessed on 1 July 2001).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| CFAR | Constant false-alarm rate |
| CG-IG | Compound Gaussian with inverse Gaussian texture |
| CM | Covariance matrix |
| GLRT | Generalized likelihood ratio test |
| ICR | Interference to clutter ratio |
| MLE | Maximum likelihood estimate |
| Probability density function | |
| PFP | Persymmetric fixed point |
| PMF | Persymmetric matched filter |
| PS-GLRT-CG-I | Persymmetric GLRT in the compound Gaussian clutter plus deterministic interference |
| PS-Rao-CG-I | Persymmetric Rao test in the compound Gaussian clutter plus deterministic interference |
| PS-Wald-CG-I | Persymmetric Wald test in the compound Gaussian clutter plus deterministic interference |
| ROC | Receiver operating characteristic |
| SCR | Signal to clutter ratio |
| Parameters | Values |
|---|---|
| Shape parameter | 0.5 |
| Scale parameter | 1 |
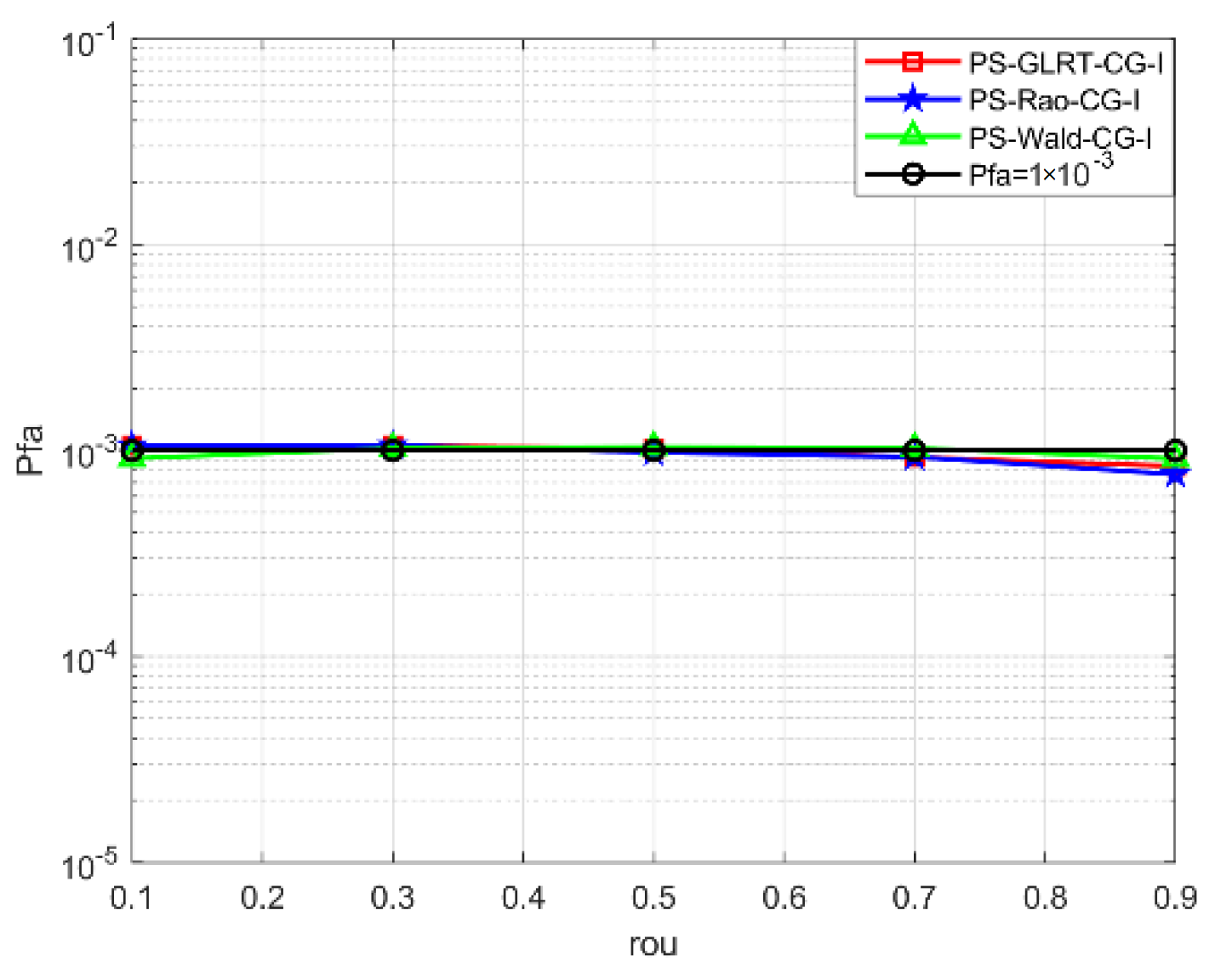
| False-alarm probability | 10−3 |
| 8 | |
| 1 | |
| 3 |
| Range Resolution | Range Cells | Range |
|---|---|---|
| 15 m | 34 | 3501–3996 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Liu, J.; Li, Y.; Chen, H.; Peng, M. Adaptive Subspace Signal Detection in Structured Interference Plus Compound Gaussian Sea Clutter. Remote Sens. 2022, 14, 2274. https://doi.org/10.3390/rs14092274
Wang Z, Liu J, Li Y, Chen H, Peng M. Adaptive Subspace Signal Detection in Structured Interference Plus Compound Gaussian Sea Clutter. Remote Sensing. 2022; 14(9):2274. https://doi.org/10.3390/rs14092274
Chicago/Turabian StyleWang, Zeyu, Jun Liu, Yachao Li, Hongmeng Chen, and Mugen Peng. 2022. "Adaptive Subspace Signal Detection in Structured Interference Plus Compound Gaussian Sea Clutter" Remote Sensing 14, no. 9: 2274. https://doi.org/10.3390/rs14092274