1. Introduction
Over the past decade, the equipment cost and operational complexity of unmanned aerial vehicles (UAVs) has been dramatically decreased while the performance has been increased [
1]. Thus, technological advancement fascinates a growing number of civilians. These platforms are used not only for leisure and filming but also for agricultural applications and environmental monitoring. Nevertheless, UAVs have been used by criminals and antisocial groups for unlawful purposes such as violating privacy or transporting explosives. The security threat has become more prevalent both in the military and civilian spheres. Hence, there is a significant demand for reliable and robust detection and classification of UAVs.
Radar is widely used in surveillance systems since it provides fast remote sensing capabilities regardless of weather or lighting conditions. Staring radar provides high Doppler resolution since it enables longer coherent integration. Therefore, staring radar demonstrates more advantages in the scenario of detecting and tracking UAVs with low radar cross section (RCS) and at relatively low speed and altitude. The birds are a kind of typical confusing target during UAVs surveillance. Thus, discriminating UAVs and birds is crucial for non-cooperative UAV surveillance. The discriminating methods are usually based on micro-Doppler signature (m-DS) which is induced by the UAV’s high-speed rotating blades and the flapping oscillation of birds’ wings.
The concept of m-DS, which is proposed by V.C Chen [
2], has been utilized for radar automatic target recognition (RATR) tasks [
3], such as aircraft classification [
4,
5,
6,
7,
8,
9], ship classification [
10], human classification [
11,
12,
13,
14,
15,
16,
17,
18,
19], vehicle classification [
20] and other classification tasks [
21,
22,
23,
24]. Several researchers have studied the m-DS of UAVs and birds [
25,
26,
27,
28,
29] and applied it to the classification tasks. Ren et al. [
3] developed a system for classifying UAVs from other targets by using a 2-D complex spectrum. Oh et al. [
30] proposed an automatic multicategory mini-UAV classification method by the extraction of m-DS features using empirical mode decomposition (EMD). Some researchers proposed various representations for m-DS analysis, including spectrograms and cepstrograms [
31,
32]. However, the insufficiency of these methods is mainly the performance verifying for measured data in reality. The local mean decomposition (LMD) is applied to separate the micro-motion parts from the main body of the UAVs’ and birds’ echoes in this paper. In this way, the signature can be identified without interference from the body components and the m-DS features are revealed more clearly. LMD was introduced in [
33] as an adaptive nonparametric technique for Time and Frequency (T-F) analysis. A complex signal can be decomposed into a series of product functions (PFs) while each one is composed of an envelope signal and a pure frequency modulated signal [
34,
35].
Target scattering properties also include RCS modulation and polarization techniques. RCS modulation resulting from repetitive wing beat patterns or rotor blade flashes is considered a robust feature for class separation since the RCS is large enough. Detailed information on RCS modulations in X-band for the classification of small targets can be found in the most recent report in the literature [
25]. Polarimetric parameters are used to distinguish large birds and UAVs of comparable size in the literature [
36]. In addition, the movement characteristic of the target is also an important feature for classification. An alternative method of identifying and classifying UAVs from birds in near fields based on the flight paths and trajectories is presented in the literature [
37,
38].
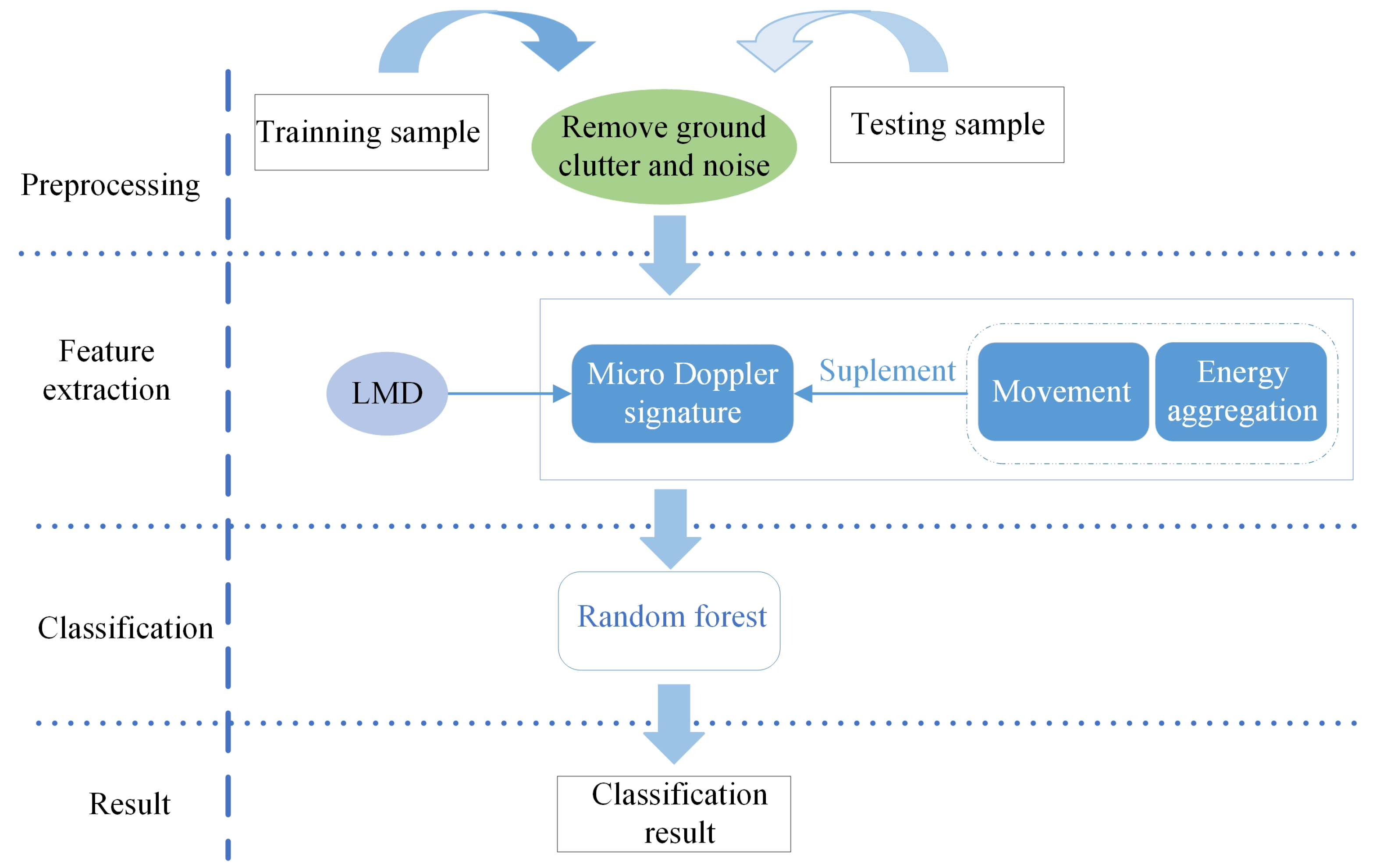
It is evident that the m-DS can be used for target classification, however, there are some problems if using m-DS only. First, m-DS can be observed only for metal rotor UAVs, or large UAVs when they are close to the radar. Moreover, m-DS cannot be observed when the size of the bird is small, or when it is gliding. At the same time, the radar can observe characteristics such as the intensity, position and speed of the echo. Regarding the issues above, an algorithm that extracts m-DS, movement and energy aggregation features from spectrogram to enhance the classification performance is proposed in this paper. Different from the current work, the data collection is obtained by a new staring radar system. It uses 8 × 8 transmitter arrays in azimuth and elevation respectively. Furthermore, the receiver array is arranged in a vertical pattern of 8 × 1. This fixed arrangement of beams allows the radar to continuously stare in all directions to process echoes by forming simultaneous beams covering the entire search area. Through long and controllable dwell times, it induces fine Doppler resolution, which contributes to the long-range and high-precision classification of targets. In addition, for the received target echo spectrogram, the situation that the m-DS may not be observed in reality is also be considered while analyzing and studying the m-DS. Therefore, the movement and energy aggregation features reflected in the spectrogram are extracted to supplement the information in exceptional situations. At the same time, it realizes the full mining of the effective information in the spectrogram, which contributes to more accurate classification of UAVs and birds target.
The main contribution of this paper is as follows:
- (1)
LMD is applied to perform m-DS analysis and feature extraction on a single frame sample in the spectrogram. Compared with the currently widely used EMD method, the proposed algorithm can achieve a better m-DS separation rate and higher decomposition efficiency;
- (2)
An RATR algorithm of UAVs and interfering targets is proposed under a new system of L band staring radar. In this algorithm, the m-DS, movement, and energy aggregation features of the target are extracted from the spectrogram to make full use of the information in the radar echo spectrogram and supplement the information in special situations;
- (3)
Singular value decomposition (SVD) is used to remove ground clutter and noise on the spectrogram for the first time and complete the signal preprocessing part.
This paper is organized as follows.
Section 2 introduces the materials and the proposed UAVs and birds classification algorithm.
Section 3 presents the experiment results and performance analysis of the proposed algorithm based on measured data.
Section 4 describes an experimental summary and prospects for future research. Finally, conclusions are made in
Section 5.
3. Results
The primary purpose of
Section 3 is to evaluate the effectiveness of the proposed classification system for UAVs and birds under L-band staring radar. Firstly, the data collection and division processing are described. Then, the performance of LMD applied to m-DS feature extraction is compared with that of the widely used EMD algorithm [
30,
39,
40]. Thirdly, the classification performance is evaluated of the proposed classification system in the general condition and in the unobservable m-DS exceptional condition. Finally, the accuracy of the proposed method is compared to state-of-the-art UAVs and birds classification techniques [
3,
30,
41]. The
Section 3.1,
Section 3.2,
Section 3.3 and
Section 3.4 provide detailed descriptions of the data set and the experimental results. All experiments were performed on a PC with an Intel(R) Core (TM) i7-9750H 2.6 GHz CPU.
3.1. Collecting and Processing Data
3.1.1. Review of the Staring Radar System
The system used for data collection in this experimental is an L band staring radar designed to achieve staring detection of ‘low, slow and small’ targets because it utilizes full time domain, full frequency domain, full airspace domain, and multi-target information acquisition and integrated processing technology, the operating parameters of staring radar are listed in
Table 1. The Doppler resolution of staring radar returns signal improves with a longer integration time, which in turn improves the accuracy of classification. The high Doppler resolution and increased signal-to-noise ratio (SNR) achieved by coherently integrating the returned signals lead to greater detail in the m-DS than hypothetical returns signal from a 2-D scanning radar [
1].
Figure 6 depicts the starting radar detection in the field and the trajectory of the tracking target.
Figure 6b illustrates the UAV trajectory, with the global positioning system (GPS) track displayed in white.
Figure 6c illustrates the bird trajectory, with the GPS track displayed in red. Additionally, the purple curves in both figures show the radar tracks of UAVs and non-UAV targets [
42].
3.1.2. Collecting Staring Radar Data
The experimental data presented in this paper were collected at nine radar test sites in China using staring radar. Experimenters flew up UAVs to 0.3–10 km away from the staring radar during the field trials in various states. The experimenters were only able to collect data from two types of UAVs—the Inspire2 and MAVIC Air2—due to limited experimental conditions. A variety of bird species are contained in the collected data, which is due to bird species varying with the time of day, season, and region. The experimental data are also collected in different seasons and at different times of the day at major airports across the country.
3.1.3. Data Preprocessing and Partitioning
The data collected from the staring radar are manually examined, and the errors are minimized using signal processing so that errors caused by the detecting and tracking functions of the radar can be minimized.
Table 2 shows that the dataset includes four types of targets, including two types of commercial UAVs and two types of birds. The two types of UAVs in the dataset are the Inspire2 UAV and the MAVIC Air2 UAV. The two types of birds mainly include a single bird and a group of birds, and the bird data contain a variety of species due to the bird species varying with time of day, season, and region. For the division of the dataset, 60% of the data are divided into training samples, and the remaining 40% of the data are divided into test samples for performance evaluation. The following table provides the number of samples for each type of target after the dataset has been divided in the experiment.
3.2. Performance Evaluation of the LMD Algorithm Applied in m-DS Components Separation
Effective separation of the m-DS components is crucial to perform accurate feature extraction. This section compares the improvement in separation performance caused by the LMD algorithm to the EMD [
30] algorithm compared to separation ratio and time consumed. Separation ratio of the m-DS components is also analyzed quantitatively, and can be defined as follows:
is the original signal energy,
is the m-DS components energy. The quantitative analysis of the separation ratio of m-DS components is presented in
Table 3.
The time consumption of a frame signal using LMD and EMD for each of the four target categories is presented in
Table 4.
Both LMD and EMD can separate the m-DS components from the original signal. According to the quantitative analysis, LMD has a higher separation ratio than EMD. Additionally, LMD consumes much less time than EMD. Since LMD has fewer iterations, the consumption time is shorter. In order to obtain IMF, EMD must be continuously sifting, so that a large number of iterations is required, which results in a lengthy processing time. Considering the above analysis, it can be concluded that LMD performs better in the separation of m-DS components than EMD.
3.3. Performance Evaluation of the Proposed Classification System
The present section presents the classification results under general conditions and under exceptional conditions in which no m-DS is observed in order to evaluate the performance of the classification system presented in this paper.
3.3.1. In the General Condition
This experiment evaluates the accuracy of the proposed algorithm in classifying UAVs and birds. During the classification process, the random forest is a classifier that is composed of multiple decision trees, and the voting mechanism of the multiple decision trees is used to improve the decision performance. More precisely, the random forest is a powerful classifier that is formed by combining multiple weak classifiers. A random forest’s classification performance is affected by the number of decision trees. This section uses the equal error rate (
EER) and the false acceptance rate (
FAR) with 1% false rejection rate (
FRR) (
) as evaluation indicators.
FAR represents the percentage of false acceptances. Specifically, it can be defined as the percentage of non-target samples being falsely classified as the target.
FRR represents the percentage of false rejection. Specifically, it can be defined as the percentage of the target samples being falsely classified as non-target. When these two error rates are equal, it is referred to as an
EER. This article reports the performance in terms of these two criteria because: (1) the
EER is commonly used for various verification tasks; (2) the system performs is evaluated at a low missing classification rate that
= 1% and hence reports
. A random forest consisting of between 1 and 3000 decision trees was tested to determine the number of trees that gave the best performance. The classification accuracy,
EER, and
vs. a different number of decision trees are shown in
Figure 7. In terms of both error rates and classification accuracy, the proposed algorithm achieves its best performance at 500 decision trees.
In the latter experiment, the random forest classifier consists of 500 decision trees, where the decision trees with the ID3 algorithm. The confusion matrix in
Table 5 shows the results obtained by the algorithm presented in this article. Results indicate that the proposed algorithm can achieve high classification accuracy for the four target classes.
The performance of the proposed method is evaluated with EER and are both 0.71 and 0.42, it is evident that the proposed method is highly effective.
After evaluating the performance of the proposed algorithm, the next step is to test whether extracting m-DS features in conjunction with movement and energy aggregation features can achieve a complementary effect. In
Figure 8, the classification accuracy is shown for different combinations of features, where each feature contains uncorrelated information. An accuracy of 90.46% can be achieved when only m-DS features are extracted. The classification accuracy can reach 99.10% when both movement and energy aggregation features are combined with m-DS features. As a consequence, higher classification accuracy can be achieved by combining the features of movement and energy aggregation.
3.3.2. In the Exceptional Condition
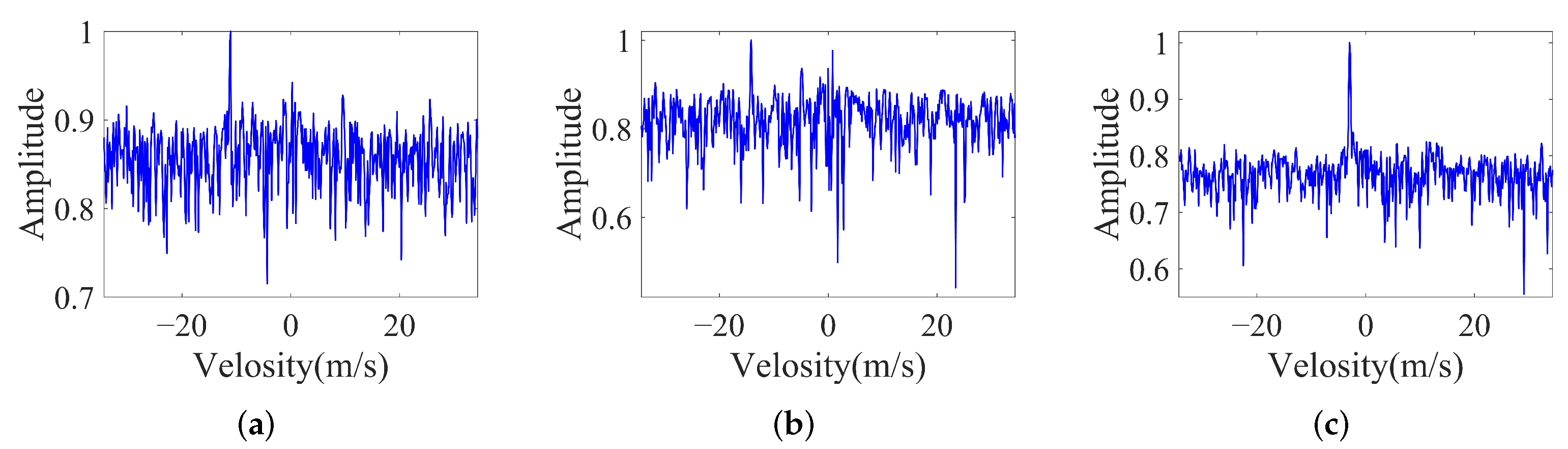
In the exceptional condition, the spectrogram of the Inspire2 UAV and a bird is shown in
Figure 1b and
Figure 1e, respectively. The experimental take out a frame signal after amplitude normalization, as shown in
Figure 9, which shows that only the body energy can be observed. It is impossible to classify the targets by extracting the m-DS features, so it is necessary to classify them by extraction movement and energy aggregation features. In addition, UAVs can mimic certain bird flight patterns to some extent. When the trajectories of UAVs and birds are similar, they can be classified by features such as flight speed range and energy concentration. Additionally, photoelectric sensors may also be utilized for auxiliary recognition.
The confusion matrix is shown in
Table 6; the proposed method has achieved promising classification accuracy. It can be concluded that the classification method by extraction m-DS features fails when the UAVs is far from the radar or in the exceptional condition of bird gliding, as this time, the algorithm proposed is also capable of combining movement and energy aggregation features that contribute to a highly classification accuracy.
3.4. Comparison with State-of-the-Arts
This experiment compares the proposed algorithm to that of EMD [
30] and SVD [
41] for signal decomposition, SRA [
3] for subspace analysis in terms of test
EER and
.
Table 7 summarizes the classification results obtained by the proposed algorithm in this paper as compared with the state-of-the-art, and the reasons for the differences can be deduced. EMD requires multiple iterations in the decomposition process, which leads to a long time consuming, which mainly carries out time frequency analysis and feature extraction for fretting. SVD projects the spectrogram into a vector and extracts features, but it cannot avoid the interference of body energy, resulting in low classification accuracy. The algorithm of SRA projects the signal into the subspace, which is more dependent on the accurate selection of the projection direction. When there is an outlier, it will lead to inaccurate projection, thus affecting the classification effect. Among them, log-Fourier transforms combined with the SRA can achieve the lowest error rate such that
= 3.27%, and a better performance is provided by the proposed algorithm than by reducing the
EER by 2.56% compared to log-Fourier transform combined the SRA. In conclusion, based on the above analysis, the algorithm proposed in this paper achieves the optimal performance for the classification of UAVs and birds.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}