
Investigating the Potential of Sentinel-2 MSI in Early Crop Identification in Northeast China

Abstract
:1. Introduction
2. Study Area and Data
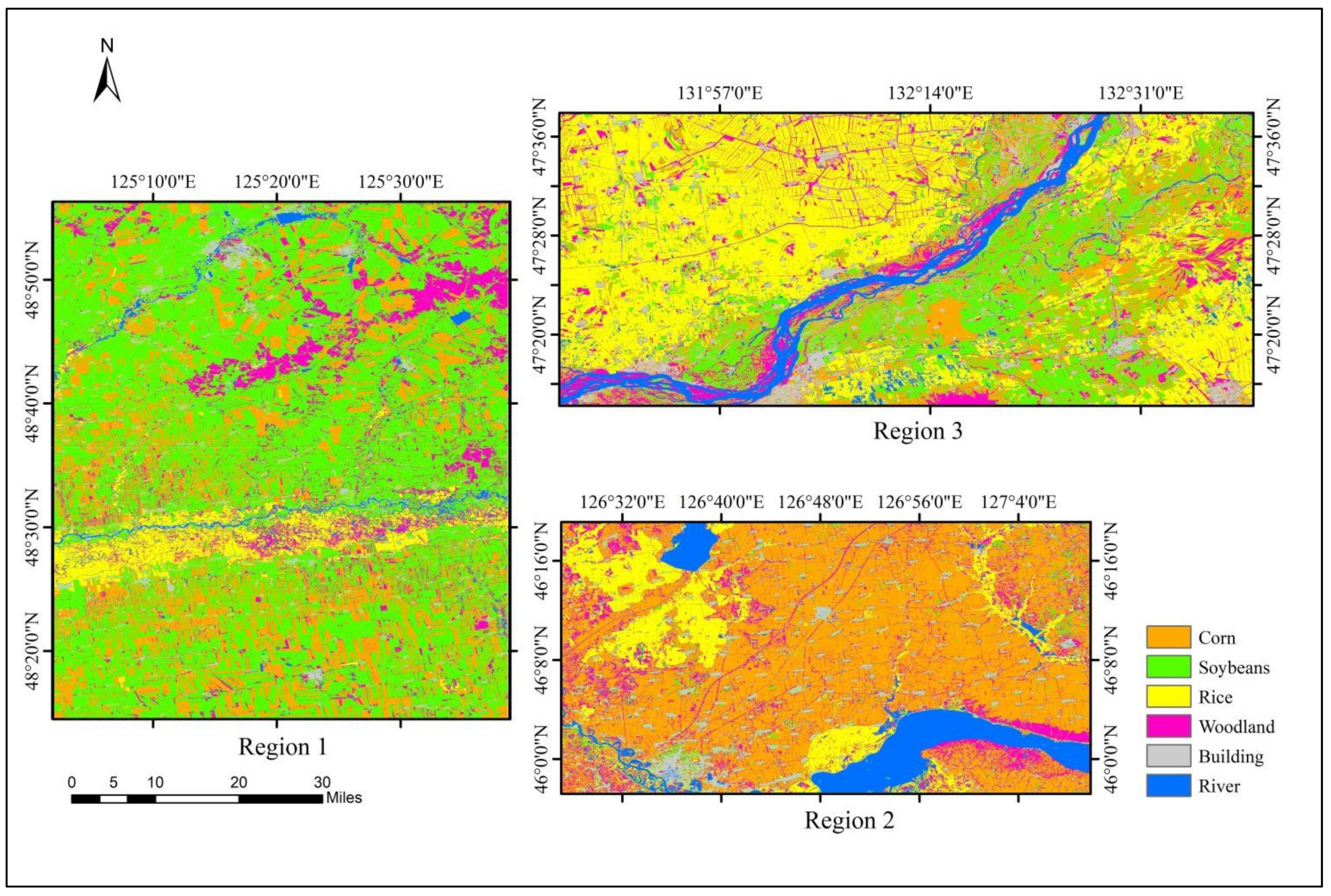
2.1. Study Area
2.2. Data
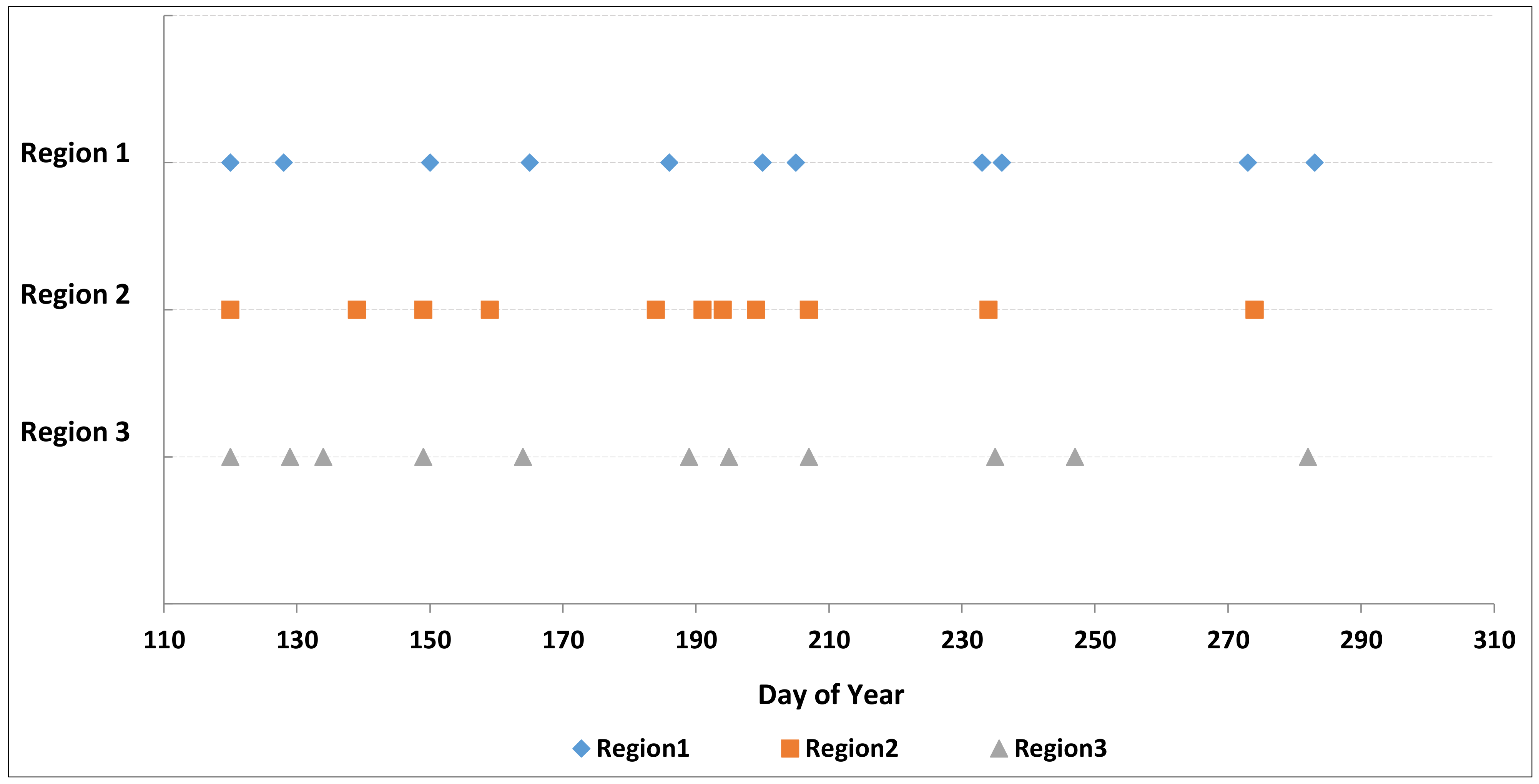
2.2.1. Sentinel-2 Data
2.2.2. Ground Survey Data
2.2.3. Supplementary Data
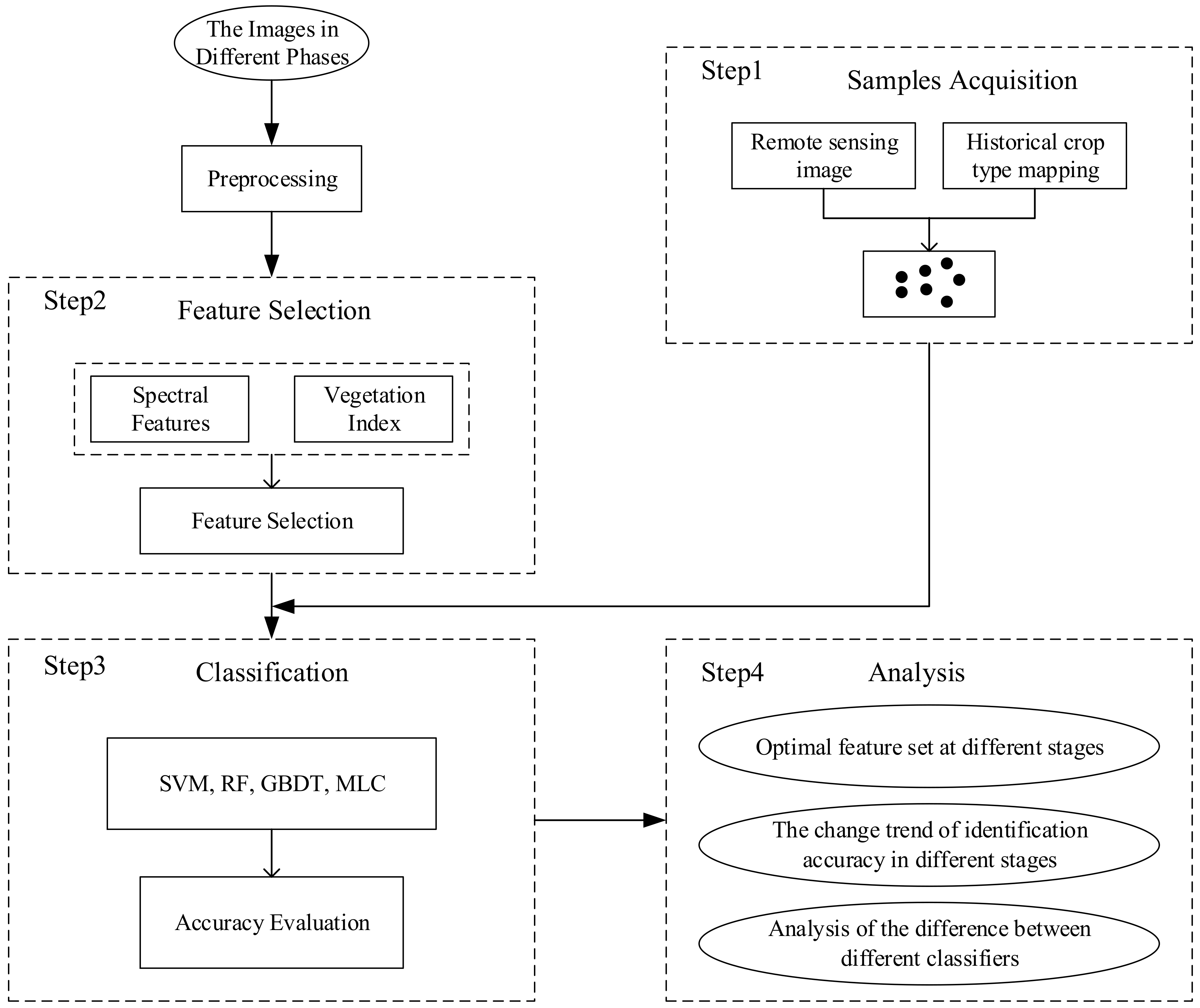
3. Method
3.1. Automatic Sample Construction Based on Historical Crop Maps
3.2. Feature Preparation
3.3. Crop Classification Model
3.4. Feature Optimization
3.5. Accuracy Assessment
4. Results and Discussion
4.1. Automatic Sample Construction and Analysis of Sample Separability
4.2. The Optimal Features and Changes in Different Stages
4.3. Variation Characteristics of Crop Identification Accuracy at Different Stages
4.3.1. The Recognition Accuracy Level of Corn at Different Stages
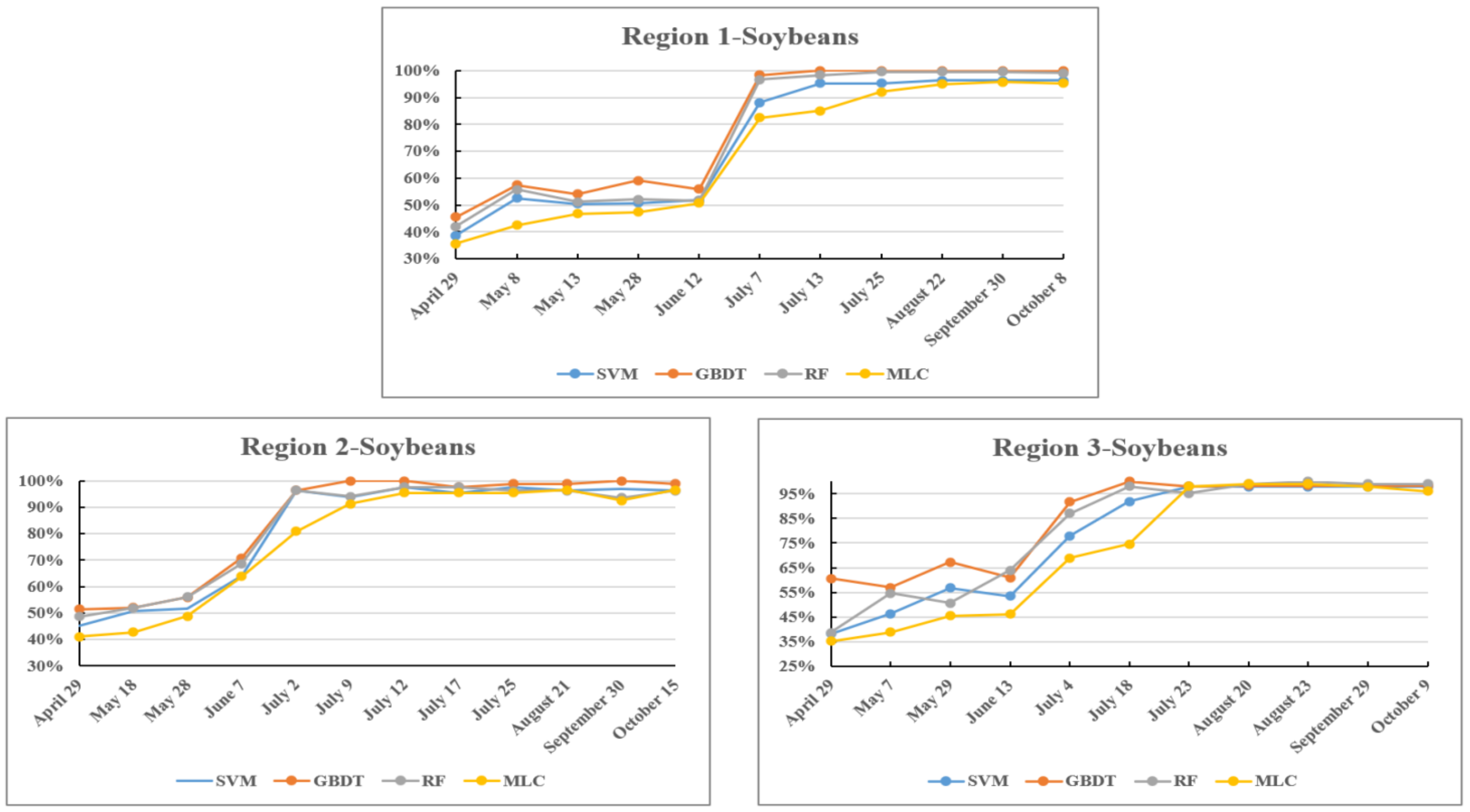
4.3.2. The Recognition Accuracy Level of Soybeans at Different Stages
4.3.3. The Recognition Accuracy Level of Rice at Different Stages
4.4. Potential Analysis of Early Crop Identification
5. Conclusions
- (1)
- The identification accuracy of corn in the early growth stage was between 40% and 79%, while in the middle stage, it could reach 79~100%, and in the late stage, it was between 90% and 100%. The earliest identification time of corn could be obtained in early July (the seven leaves stage), and the identification accuracy was up to 86%. The identification accuracy of soybeans in the early growth stage was between 35% and 71%, while in the middle stage, it could reach 69~100%, and in the later stage, it was between 92% and 100%. The earliest identification time of soybeans could also be obtained in early July (the blooming stage), and the identification accuracy was up to 87%. The identification accuracy of rice in the early growth stage was between 58% and 100%, while in the middle stage, it could reach 93~100%, and in the late stage, it was between 96% and 100%. The earliest identification time of rice could be obtained at the end of April (the flooding period), and the identification accuracy was up to 86%.
- (2)
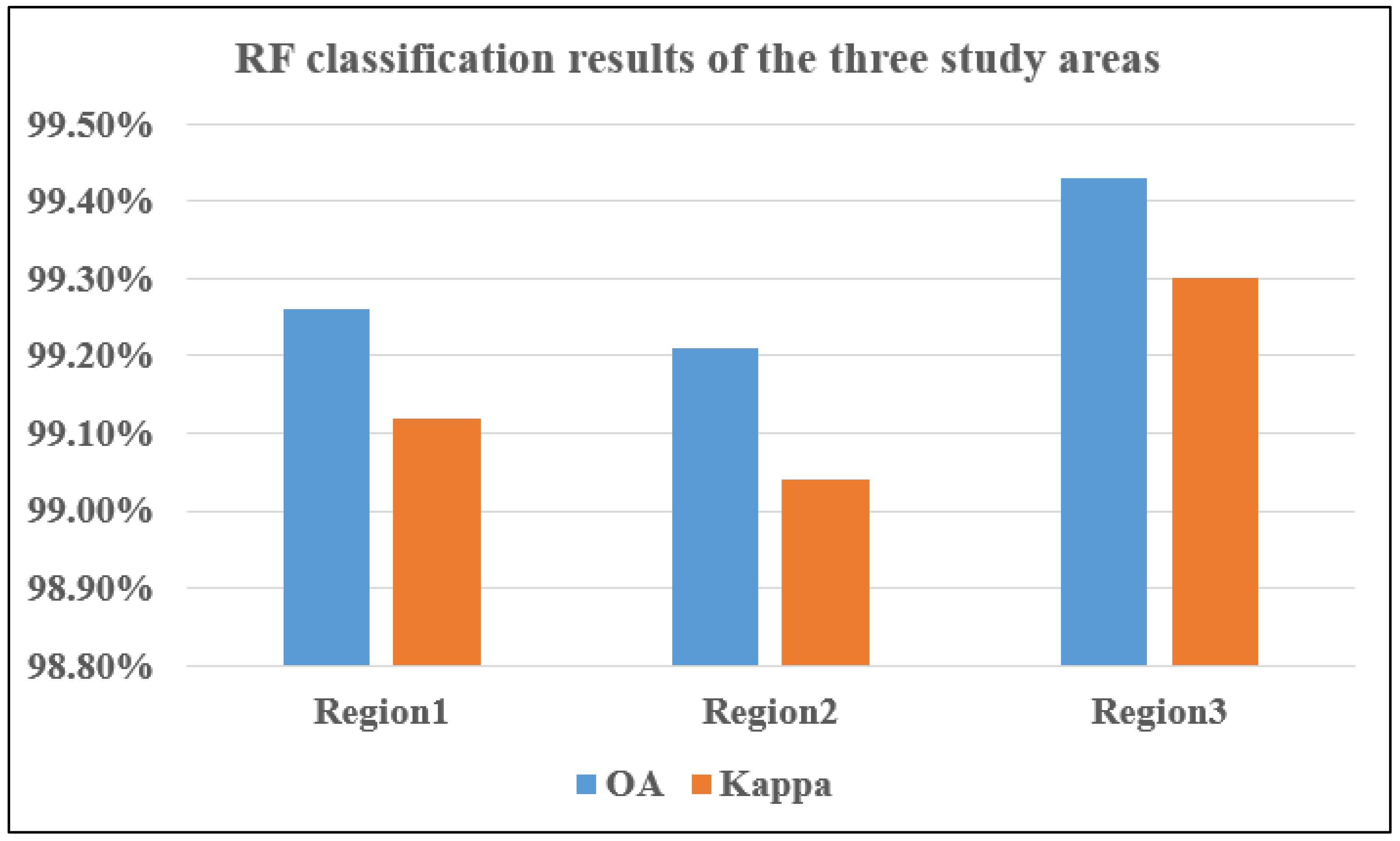
- GBDT and RF performed better in the whole growth phases and had higher recognition accuracy than other classifiers. Therefore, they are recommended crop early recognition research.
- (3)
- In the early stage, B12, NDTI, LSWI, and NDSVI played important roles in identifying the crops. In the middle stage, features such as B12, B11, B8, LSWI, NRED2, and RENDVI contributed greatly. In the late stage, NDTI, B11, and NDSVI were important in identifying the crops.
- (4)
- It was effective in acquiring training samples based on crop-type mapping and remote sensing data, which could effectively reduce the workload of manual sample selection, and it is of great significance for large area and real-time crop mapping.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phase | April 29 | May 8 | May 13 | May 28 | June 12 | July 7 | July 13 | July 25 | August 22 | September 30 | October 8 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rank by feature importance | B12 | NDTI | NDTI | LSWI_3 | B12_4 | B5_5 | B12_6 | B8_7 | NRED2_8 | B12_4 | NDTI_8 |
| NDTI | LSWI | OSAVI_2 | NDSVI_3 | NRED2_3 | B12_5 | LSWI_4 | B11_4 | B12_4 | B12_7 | B5_7 | |
| B7 | RENDVI_1 | LSWI | NDTI | B2_4 | RENDVI_5 | B5_6 | B12_4 | NDTI_7 | B11_4 | NDSVI_8 | |
| NDSVI | NRED2_1 | B2 | NRED2_3 | NRED1_3 | B8_5 | B11_6 | B3_6 | B5_8 | NRED3_8 | B12_6 | |
| RENDVI | NDVI_1 | NDSVI_1 | B12_3 | WDRVI_3 | NRED3_5 | B12_4 | B2_6 | B11_7 | B5_7 | B12_5 | |
| LSWI | NRED2 | LSWI_2 | WDRVI_1 | LSWI_3 | B12_4 | NDSVI_5 | NDTI_7 | B11_4 | RENDVI_7 | B8A_8 | |
| NRED1 | WDRVI_1 | NDSVI_2 | NRED1_3 | NDVI_3 | NDVI_5 | B2_4 | B12_6 | B8A_8 | B11_7 | B11_7 | |
| B11 | NDSVI | NDVI_1 | EVI_3 | B4_2 | B11_4 | B11_4 | NDTI_4 | NRED2_8 | B11_8 | B12_3 | |
| WDRVI | B11 | B4_2 | B11_2 | TVI_2 | RENDVI_5 | NDSVI_6 | B12_7 | B5_8 | B3_8 | B11_9 | |
| TVI | NRED1_1 | B2_2 | GNDVI_2 | VIgreen_4 | LSWI_5 | B4_6 | NDVI_7 | LSWI_6 | B3_6 | B11_4 | |
| EVI | TVI_1 | WDRVI_2 | B11_3 | WDRVI_1 | EVI_5 | B11_3 | B11_7 | B11_6 | EVI_3 | B11_8 | |
| NDVI | MCARI_1 | NDVI_2 | NDVI_3 | B2_2 | VIgreen_5 | NDVI_6 | B3_7 | LSWI_4 | NDSVI_4 | MCARI_10 | |
| MCARI | NDTI_1 | TVI_1 | MCARI_3 | B4_4 | NDSVI_5 | B4_5 | NDSVI_6 | NDSVI_4 | B12_5 | B4_6 | |
| B4 | NRED3_1 | B11 | GCVI_3 | NDSVI_4 | B3_5 | LSWI_6 | NRED2_6 | B12_6 | B12_3 | LSWI_9 | |
| B5 | GNDVI_1 | RENDVI_1 | NDTI_2 | B11_4 | OSAVI_2 | B2_6 | NDSVI_4 | B3_6 | OSAVI_7 | RENDVI_8 |
| Phase | April 29 | May 18 | May 28 | June 7 | July 2 | July 9 | July 12 | July 17 | July 25 | August 21 | September 30 | October 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rank by feature importance | TVI | NDSVI_1 | LSWI | LSWI_3 | B11_4 | B11_5 | B12_6 | B12_6 | B8_6 | B11_9 | B12_6 | NDTI_2 |
| LSWI | NDSVI | B11_1 | B11_2 | B11_4 | NDSVI_4 | B12_5 | NDSVI_2 | LSWI_8 | B11_7 | B11_7 | B12_8 | |
| NDTI | B2_1 | B12_1 | B12_2 | EVI_4 | NRED2_5 | RENDVI_6 | B11_7 | B11_2 | B11_3 | NDSVI_2 | B11_8 | |
| RENDVI | LSWI_1 | GNDVI | NDSVI_2 | B2_4 | B12_5 | B2_5 | B11_2 | B5_7 | NDSVI_6 | B11_3 | RENDVI_5 | |
| NDSVI | TVI | B2_1 | NDSVI_3 | B12_4 | B5_4 | B11_5 | B4_7 | B12_5 | B11_9 | B12_7 | NRED2_6 | |
| B11 | B6_1 | OSAVI_1 | B12_2 | NRED1_4 | B2_2 | B5_5 | NDSVI_5 | NDSVI_7 | B4_2 | NRED3_8 | B12_2 | |
| VIgreen | GNDVI_1 | GCVI_1 | DVI_2 | OSAVI_4 | B12_5 | B11_5 | NRED2_7 | B12_2 | NRED3_6 | NRED1_2 | GCVI_8 | |
| EVI | B12_1 | RENDVI_1 | NRED2 | B12_4 | B4_5 | NDSVI_5 | LSWI_2 | B3_3 | LSWI_2 | B3_3 | B12_9 | |
| B12 | NRED2_1 | NRED1_1 | TVI_1 | NDSVI_3 | LSWI_3 | LSWI_3 | NRED3_4 | NDSVI_4 | LSWI_3 | LSWI_3 | B11_2 | |
| WDRVI | NDSVI_1 | TVI | NRED1_2 | NRED2_3 | B11_2 | B3_2 | B12_2 | B12_6 | NDSVI_6 | DVI_5 | NDSVI_3 | |
| NRED2 | NRED3_1 | NDSVI_2 | NDTI_3 | NDTI_4 | NDSVI_2 | WDRVI_7 | B12_7 | B11_2 | B12_2 | RVI_7 | NRED3_7 | |
| B4 | NRED1_1 | WDRVI | B3_3 | RVI_4 | NRED2_4 | NDSVI_2 | LSWI_4 | NRED3_2 | NDSVI_1 | NDTI_2 | NDSVI_3 | |
| B2 | B4_1 | NDTI | WDRVI_3 | LSWI_2 | RVI_4 | B5_6 | VIgreen_5 | EVI_7 | B12_8 | B12_4 | B2_8 | |
| B8A | B6_1 | B12_2 | B5_3 | TVI_4 | NDVI_2 | B12_2 | NDSVI_6 | NDTI_2 | NDTI_2 | MCARI_8 | B8A_2 | |
| B3 | NRED2 | B2_2 | B8A_3 | B11_3 | DVI_5 | NRED3_6 | B5_2 | B11_6 | NRED2_8 | LSWI_7 | DVI_8 |
| Phase | April 29 | May 7 | May 29 | June 13 | July 4 | July 18 | July 23 | August 20 | August 23 | September 29 | October 9 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rank by feature importance | NDTI | NDTI | B12_2 | NDSVI_3 | GNDVI_4 | B3_5 | NDSVI_6 | LSWI_7 | RENDVI_8 | NDSVI_3 | NDSVI_3 |
| TVI | NDTI_1 | OSAVI_2 | NRED2_3 | B12_4 | B11_5 | NRED2_6 | B5_7 | B8_2 | B6_7 | NDTI_7 | |
| LSWI | NDSVI_1 | NDTI_2 | B11_3 | B11_4 | B11_5 | B12_6 | NDTI_7 | B11_7 | B11_6 | EVI_2 | |
| B12 | LSWI_1 | NDTI_2 | RVI_2 | WDRVI_4 | NRED2_4 | B5_2 | NDSVI_7 | NDWI_8 | NRED3_5 | NDSVI_8 | |
| NDSVI | RENDVI | LSWI_2 | NDWI_2 | NDSVI_2 | B12_2 | NDTI_6 | NDSVI_3 | NRED2_2 | NDVI_7 | NDTI_8 | |
| RENDVI | TVI_1 | NDSVI | DVI_2 | NRED2_2 | B11_5 | B11_1 | B11_7 | B11_7 | OSAVI_8 | B6_8 | |
| B5 | WDRVI | TVI_2 | NRED1_1 | NRED1_2 | B5_5 | B11_6 | B12_7 | B12_8 | B5_6 | MCARI_8 | |
| NRED1 | B11_1 | B11 | B2 | B3_4 | B5_5 | B11_4 | NRED1_7 | B12_7 | NDSVI_2 | WDRVI_8 | |
| NRED2 | B3_1 | NDTI_1 | NRED2_2 | NDSVI_1 | VIgreen_5 | B3_5 | B11_5 | B3_7 | NRED1_7 | B3_1 | |
| B11 | NRED1 | VIgreen_2 | MCARI | VIgreen_2 | NDSVI_5 | B3_6 | B12_7 | B11_8 | B11_3 | OSAVI_8 | |
| VIgreen | TVI | EVI_2 | OSAVI_3 | NDWI_4 | NDSVI_5 | NDSVI_4 | EVI_6 | B12_8 | NRED2_5 | NRED3_8 | |
| NDVI | NDVI | NRED2 | B12_2 | NRED3_4 | B12_5 | B4_6 | B5_7 | B8_6 | EVI_2 | B12_8 | |
| EVI | NDVI_1 | NRED1_1 | NRED1_2 | RENDVI_3 | EVI_5 | B2_6 | RVI_7 | B12_6 | B7_7 | NDSVI_5 | |
| NRED3 | RVI | RVI_2 | NRED1_1 | EVI_4 | RENDVI_5 | B2_6 | RENDVI_6 | NDSVI_2 | B12_7 | B11_7 | |
| GNDVI | RENDVI | NDTI_1 | B12 | B11_2 | B12_5 | NRED1_6 | RENDVI_6 | TVI_3 | NRED3_8 | B8A_7 |
References
- Valero, S.; Arnaud, L.; Planells, M.; Ceschia, E. Synergy of Sentinel-1 and Sentinel-2 Imagery for Early Seasonal Agricultural Crop Mapping. Remote Sens. 2021, 13, 4891. [Google Scholar] [CrossRef]
- Demarez, V.; Helen, F.; Marais-Sicre, C.; Baup, F. In-Season Mapping of Irrigated Crops Using Landsat 8 and Sentinel-1 Time Series. Remote Sens. 2019, 11, 118. [Google Scholar] [CrossRef] [Green Version]
- Hao, P.Y.; Zhan, Y.L.; Wang, L.; Niu, Z.; Shakir, M. Feature Selection of Time Series MODIS Data for Early Crop Classification Using Random Forest: A Case Study in Kansas, USA. Remote Sens. 2015, 7, 5347–5369. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Ren, J.; Tang, H.; Shi, Y.; Liu, J. Progress and perspectives on agricultural remote sensing research and applications in China. J. Remote Sens. 2016, 20, 748–767. [Google Scholar]
- Jia, K.; Li, Q.Z. Research status and prospect of feature variable selection for crop remote sensing classification. Resour. Sci. 2013, 35, 2507–2516. [Google Scholar]
- Baldeck, C.A.; Asner, G.P. Estimating Vegetation Beta Diversity from Airborne Imaging Spectroscopy and Unsupervised Clustering. Remote Sens. 2013, 5, 2057–2071. [Google Scholar] [CrossRef] [Green Version]
- Fekri, E.; Latifi, H.; Amani, M.; Zobeidinezhad, A. A Training Sample Migration Method for Wetland Mapping and Monitoring Using Sentinel Data in Google Earth Engine. Remote Sens. 2021, 13, 4169. [Google Scholar] [CrossRef]
- Wei, M.F.; Qiao, B.J.; Zhao, J.H.; Zuo, X.Y. The area extraction of winter wheat in mixed planting area based on Sentinel-2 a remote sensing satellite images. Int. J. Parallel Emergent Distrib. Syst. 2020, 35, 297–308. [Google Scholar] [CrossRef]
- Skakun, S.; Roger, J.-C.; Vermote, E.; Franch, B.; Becker-Reshef, I.; Justice, C.O.; Masek, J.G. Combined Use of Landsat-8 and Sentinel-2 Data for Agricultural Monitoring. In Proceedings of the AGU Fall Meeting Abstracts, New Orleans, LA, USA, 11–17 December 2017; p. EP22C-07. [Google Scholar]
- Gallego, F.J.; Kussul, N.; Skakun, S.; Kravchenko, O.; Shelestov, A.; Kussul, O. Efficiency assessment of using satellite data for crop area estimation in Ukraine. Int. J. Appl. Earth Obs. Geoinf. 2014, 29, 22–30. [Google Scholar] [CrossRef]
- Ibrahim, E.S.; Rufin, P.; Nill, L.; Kamali, B.; Nendel, C.; Hostert, P. Mapping Crop Types and Cropping Systems in Nigeria with Sentinel-2 Imagery. Remote Sens. 2021, 13, 3523. [Google Scholar] [CrossRef]
- Rao, P.; Zhou, W.; Bhattarai, N.; Srivastava, A.K.; Singh, B.; Poonia, S.; Lobell, D.B.; Jain, M. Using Sentinel-1, Sentinel-2, and Planet Imagery to Map Crop Type of Smallholder Farms. Remote Sens. 2021, 13, 1870. [Google Scholar] [CrossRef]
- Wei, X.C. Extraction of Paddy Rice Planting Area Based on Environmental Satellite Images—Taking Jianghan Plain Area as Example. Mather’s Thesis, Hubei University, Wuhan, China, 2013. [Google Scholar]
- Wang, L.M.; Liu, J.; Yang, F.G.; Fu, C.H.; Teng, F.; Gao, J.M. Early recognition of winter wheat area based on GF-1 satellite. Trans. Chin. Soc. Agric. Eng. 2015, 31, 194–201. [Google Scholar]
- Tian, H.; Wang, Y.; Chen, T.; Zhang, L.; Qin, Y. Early-Season Mapping of Winter Crops Using Sentinel-2 Optical Imagery. Remote Sens. 2021, 13, 3822. [Google Scholar] [CrossRef]
- Pan, L.; Xia, H.; Zhao, X.; Guo, Y.; Qin, Y. Mapping Winter Crops Using a Phenology Algorithm, Time-Series Sentinel-2 and Landsat-7/8 Images, and Google Earth Engine. Remote Sens. 2021, 13, 2510. [Google Scholar] [CrossRef]
- Liu, J.K.; Zhong, S.Q.; Liang, W.H. Extraction on crops planting structure based on multi-temporal Landsat8 OLI Images. Remote Sens. Technol. Appl. 2015, 30, 775–783. [Google Scholar]
- Chen, L.; Lin, H.; Sun, H.; Yan, E.P.; Wang, J.J. Studies on information extraction of forest in Zhuzhou city based on decision tree classification. J. Cent. South Univ. For. Technol. 2013, 33, 46–51. [Google Scholar]
- Varela, S.; Dhodda, P.R.; Hsu, W.H.; Prasad, P.V.V.; Assefa, Y.; Peralta, N.R.; Griffin, T.; Sharda, A.; Ferguson, A.; Ciampitti, I.A. Early-Season Stand Count Determination in Corn via Integration of Imagery from Unmanned Aerial Systems (UAS) and Supervised Learning Techniques. Remote Sens. 2018, 10, 343. [Google Scholar] [CrossRef] [Green Version]
- You, N.S.; Dong, J.W. Examining earliest identifiable timing of crops using all available Sentinel 1/2 imagery and Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2020, 161, 109–123. [Google Scholar] [CrossRef]
- Vorobiova, N.; Chernov, A. Curve fitting of MODIS NDVI time series in the task of early crops identification by satellite images. Procedia Eng. 2017, 201, 184–195. [Google Scholar] [CrossRef]
- Guan, X.; Huang, C.; Liu, G.; Meng, X.; Liu, Q. Mapping Rice Cropping Systems in Vietnam Using an NDVI-Based Time-Series Similarity Measurement Based on DTW Distance. Remote Sens. 2016, 8, 19. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.T.; Wang, C.Z.; Zhang, B.; Lu, L.L. Object-Based Crop Classification with Landsat-MODIS Enhanced Time-Series Data. Remote Sens. 2015, 7, 16091–16107. [Google Scholar] [CrossRef] [Green Version]
- Mondal, S.; Jeganathan, C. Mountain agriculture extraction from time-series MODIS NDVI using dynamic time warping technique. Int. J. Remote Sens. 2018, 39, 3679–3704. [Google Scholar] [CrossRef]
- Jia, K.; Liang, S.L.; Zhang, L.; Wei, X.Q.; Yao, Y.J.; Xie, X.H. Forest cover classification using Landsat ETM+ data and time series MODIS NDVI data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 32–38. [Google Scholar] [CrossRef]
- Atzberger, C.; Rembold, F. Mapping the Spatial Distribution of Winter Crops at Sub-Pixel Level Using AVHRR NDVI Time Series and Neural Nets. Remote Sens. 2013, 5, 1335–1354. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Xu, S.; He, T. Mapping Paddy Rice with Sentinel-1/2 and Phenology-, Object-Based Algorithm—A Implementation in Hangjiahu Plain in China Using GEE Platform. Remote Sens. 2021, 13, 990. [Google Scholar] [CrossRef]
- Chakhar, A.; Hernández-López, D.; Ballesteros, R.; Moreno, M.A. Improving the Accuracy of Multiple Algorithms for Crop Classification by Integrating Sentinel-1 Observations with Sentinel-2 Data. Remote Sens. 2021, 13, 243. [Google Scholar] [CrossRef]
- Phiri, D.; Simwanda, M.; Salekin, S.; Nyirenda, V.R.; Murayama, Y.; Ranagalage, M. Sentinel-2 Data for Land Cover/Use Mapping: A Review. Remote Sens. 2020, 12, 2291. [Google Scholar] [CrossRef]
- Hu, Y.; Zeng, H.; Tian, F.; Zhang, M.; Wu, B.; Gilliams, S.; Li, S.; Li, Y.; Lu, Y.; Yang, H. An Interannual Transfer Learning Approach for Crop Classification in the Hetao Irrigation District, China. Remote Sens. 2022, 14, 1208. [Google Scholar] [CrossRef]
- Praticò, S.; Solano, F.; Di Fazio, S.; Modica, G. Machine Learning Classification of Mediterranean Forest Habitats in Google Earth Engine Based on Seasonal Sentinel-2 Time-Series and Input Image Composition Optimisation. Remote Sens. 2021, 13, 586. [Google Scholar] [CrossRef]
- Zhao, L.C. Research on Indicative Image Identification Feature of Major Crops and Its Application Method. Mather’s Thesis, Aerospace Information Research Institute Chine Academy of Sciences, Beijing, China, 2020. [Google Scholar]
- Yu, L.; Su, J.; Li, C.; Wang, L.; Luo, Z.; Yan, B. Improvement of Moderate Resolution Land Use and Land Cover Classification by Introducing Adjacent Region Features. Remote Sens. 2018, 10, 414. [Google Scholar] [CrossRef] [Green Version]
- He, Z.X.; Zhang, M.; Wu, B.F.; Xing, Q. Extraction of summer crop in Jiangsu based on Google Earth Engine. J. Geo-Inf. Sci. 2019, 21, 752–766. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.; Deering, D. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; Remote Sensing Center: College Station, TX, USA, 1973. [Google Scholar]
- Xiao, X.; Boles, S.; Frolking, S.; Li, C.; Babu, J.Y.; Salas, W.; Moore, B., III. Mapping paddy rice agriculture in South and Southeast Asia using multi-temporal MODIS images. Remote Sens. Environ. 2006, 100, 95–113. [Google Scholar] [CrossRef]
- Huete, A.; Justice, C.; Van Leeuwen, W. MODIS vegetation index (MOD13). Algorithm Theor. Basis Doc. 1999, 3, 295–309. [Google Scholar]
- Daughtry, C.S.; Walthall, C.; Kim, M.; De Colstoun, E.B.; McMurtrey, J.E., III. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Deering, D.W. Rangeland Reflectance Characteristics Measured by Aircraft and Spacecraftsensors; Texas A&M University: College Station, TX, USA, 1978. [Google Scholar]
- Richardson, A.J.; Everitt, J.H. Using spectral vegetation indices to estimate rangeland productivity. Geocarto Int. 1992, 7, 63–69. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Viña, A.; Arkebauer, T.J.; Rundquist, D.C.; Keydan, G.; Leavitt, B. Remote estimation of leaf area index and green leaf biomass in maize canopies. Geophys. Res. Lett. 2003, 30, 1248. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Deventer, V.A.P.; Ward, A.D.; Gowda, P.H.; Lyon, J.G. Using thematic mapper data to identify contrasting soil plains and tillage practices. Photogramm. Eng. Remote Sens. 1997, 63, 87–93. [Google Scholar]
- Qi, J.; Marsett, R.; Heilman, P.; Bieden-bender, S.; Moran, S.; Goodrich, D.; Weltz, M.J.E. RANGES improves satellite-based information and land cover assessments in southwest United States. Eos Trans. Am. Geophys. Union 2002, 83, 601–606. [Google Scholar] [CrossRef]
- Peña-Barragán, J.M.; Ngugi, M.K.; Plant, R.E.; Six, J. Object-based crop identification using multiple vegetation indices, textural features and crop phenology. Remote Sens. Environ. 2011, 115, 1301–1316. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide dynamic range vegetation index for remote quantification of biophysical characteristics of vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Gao, B.C. Normalized difference water index for remote sensing of vegetation liquid water from space. In Proceedings of the Imaging Spectrometry, Orlando, FL, USA, 17–21 April 1995; pp. 225–236. [Google Scholar]
- Bhatt, P.; Maclean, A.; Dickinson, Y.; Kumar, C. Fine-Scale Mapping of Natural Ecological Communities Using Machine Learning Approaches. Remote Sens. 2022, 14, 563. [Google Scholar] [CrossRef]
- Zhang, H.X.; Wang, Y.J.; Shang, J.L.; Liu, M.X.; Li, Q.Z. Investigating the impact of classification features and classifiers on crop mapping performance in heterogeneous agricultural landscapes. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102388. [Google Scholar] [CrossRef]
- Rana, V.K.; Suryanarayana, T.M.V. Performance evaluation of MLE, RF and SVM classification algorithms for watershed scale land use/land cover mapping using sentinel 2 bands. Remote Sens. Appl. Soc. Environ. 2020, 19, 100351. [Google Scholar] [CrossRef]
- Asgarian, A.; Soffianian, A.; Pourmanafi, S. Crop type mapping in a highly fragmented and heterogeneous agricultural landscape: A case of central Iran using multi-temporal Landsat 8 imagery. Comput. Electron. Agric. 2016, 127, 531–540. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Aneece, I.; Thenkabail, P.S. Classifying Crop Types Using Two Generations of Hyperspectral Sensors (Hyperion and DESIS) with Machine Learning on the Cloud. Remote Sens. 2021, 13, 4704. [Google Scholar] [CrossRef]
- Pelletier, C.; Valero, S.; Inglada, J.; Champion, N.; Dedieu, G. Assessing the robustness of Random Forests to map land cover with high resolution satellite image time series over large areas. Remote Sens. Environ. 2016, 187, 156–168. [Google Scholar] [CrossRef]
- Hao, P.; Di, L.; Zhang, C.; Guo, L. Transfer Learning for Crop classification with Cropland Data Layer data (CDL) as training samples. Sci. Total Environ. 2020, 733, 138869. [Google Scholar] [CrossRef] [PubMed]
- Kang, Y.; Hu, X.; Meng, Q.; Zou, Y.; Zhang, L.; Liu, M.; Zhao, M. Land Cover and Crop Classification Based on Red Edge Indices Features of GF-6 WFV Time Series Data. Remote Sens. 2021, 13, 4522. [Google Scholar] [CrossRef]
- Maponya, M.G.; Van Niekerk, A.; Mashimbye, Z.E. Pre-harvest classification of crop types using a Sentinel-2 time-series and machine learning. Comput. Electron. Agric. 2020, 169, 105164. [Google Scholar] [CrossRef]
- Luo, H.X.; Dai, S.P.; Li, M.F.; Liu, E.P.; Zheng, Q.; Hu, Y.Y.; Yi, X.P. Comparison of machine learning algorithms for mapping mango plantations based on Gaofen-1 imagery. J. Integr. Agric. 2020, 19, 2815–2828. [Google Scholar] [CrossRef]
- Yang, L.B.; Mansaray, L.R.; Huang, J.F.; Wang, L.M. Optimal segmentation scale parameter, feature subset and classification algorithm for geographic object-based crop recognition using multisource satellite imagery. Remote Sens. 2019, 11, 514. [Google Scholar] [CrossRef] [Green Version]
- Mansaray, L.R.; Zhang, K.; Kanu, A.S. Dry biomass estimation of paddy rice with Sentinel-1A satellite data using machine learning regression algorithms. Comput. Electron. Agric. 2020, 176, 105674. [Google Scholar] [CrossRef]
- Šiljeg, A.; Panđa, L.; Domazetović, F.; Marić, I.; Gašparović, M.; Borisov, M.; Milošević, R. Comparative Assessment of Pixel and Object-Based Approaches for Mapping of Olive Tree Crowns Based on UAV Multispectral Imagery. Remote Sens. 2022, 14, 757. [Google Scholar] [CrossRef]
- Le Quilleuc, A.; Collin, A.; Jasinski, M.F.; Devillers, R. Very High-Resolution Satellite-Derived Bathymetry and Habitat Mapping Using Pleiades-1 and ICESat-2. Remote Sens. 2022, 14, 133. [Google Scholar] [CrossRef]
- Sakamoto, M.; Ullah, S.M.A.; Tani, M. Land Cover Changes after the Massive Rohingya Refugee Influx in Bangladesh: Neo-Classic Unsupervised Approach. Remote Sens. 2021, 13, 5056. [Google Scholar] [CrossRef]
- Barber, M.E.; Rava, D.S.; López-Martínez, C. L-Band SAR Co-Polarized Phase Difference Modeling for Corn Fields. Remote Sens. 2021, 13, 4593. [Google Scholar] [CrossRef]
- Ha, N.T.; Manley-Harris, M.; Pham, T.D.; Hawes, I. A Comparative Assessment of Ensemble-Based Machine Learning and Maximum Likelihood Methods for Mapping Seagrass Using Sentinel-2 Imagery in Tauranga Harbor, New Zealand. Remote Sens. 2020, 12, 355. [Google Scholar] [CrossRef] [Green Version]
- Ren, T.; Liu, Z.; Zhang, L.; Liu, D.; Xi, X.; Kang, Y.; Zhao, Y.; Zhang, C.; Li, S.; Zhang, X. Early Identification of Seed Maize and Common Maize Production Fields Using Sentinel-2 Images. Remote Sens. 2020, 12, 2140. [Google Scholar] [CrossRef]
- Obata, S.; Cieszewski, C.J.; Lowe, R.C., III; Bettinger, P. Random Forest Regression Model for Estimation of the Growing Stock Volumes in Georgia, USA, Using Dense Landsat Time Series and FIA Dataset. Remote Sens. 2021, 13, 218. [Google Scholar] [CrossRef]
- Fan, D.D.; Li, Q.Z.; Wang, H.Y.; Du, X. Improvement in recognition accuracy of minority crops by resampling of imbalanced training datasets of remote sensing. J. Remote Sens. 2019, 23, 730–742. [Google Scholar]
- Tuvdendorj, B.; Zeng, H.; Wu, B.; Elnashar, A.; Zhang, M.; Tian, F.; Nabil, M.; Nanzad, L.; Bulkhbai, A.; Natsagdorj, N. Performance and the Optimal Integration of Sentinel-1/2 Time-Series Features for Crop Classification in Northern Mongolia. Remote Sens. 2022, 14, 1830. [Google Scholar] [CrossRef]
- Luo, H.; Li, M.; Dai, S.; Li, H.; Li, Y.; Hu, Y.; Zheng, Q.; Yu, X.; Fang, J. Combinations of Feature Selection and Machine Learning Algorithms for Object-Oriented Betel Palms and Mango Plantations Classification Based on Gaofen-2 Imagery. Remote Sens. 2022, 14, 1757. [Google Scholar] [CrossRef]
- Zhang, H.X.; Li, Q.Z.; Wen, N.; Du, X.; Tao, Q.S.; Tian, Y.C. Important factors affecting crop acreage estimation based on remote sensing image classification technique. Remote Sens. Land Resour. 2015, 27, 54–61. [Google Scholar]
- Dong, J.; Xiao, X.; Menarguez, M.A.; Zhang, G.; Qin, Y.; Thau, D.; Biradar, C.; Moore, B., III. Mapping paddy rice planting area in northeastern Asia with Landsat 8 images, phenology-based algorithm and Google Earth Engine. Remote Sens. Environ. 2016, 185, 142–154. [Google Scholar] [CrossRef] [Green Version]
- Yin, L.K.; You, N.S.; Zhang, G.L.; Huang, J.C.; Dong, J.W. Optimizing feature selection of individual crop types for improved crop mapping. Remote Sens. 2020, 12, 162. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Zhang, P.; Shen, K.; Pei, Z. Rice identification at the early stage of the rice growth season with single fine quad Radarsat-2 data. In Remote Sensing for Agriculture, Ecosystems, and Hydrology XVIII; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; Volume 9998, p. 99981J. [Google Scholar]
- Singha, M.; Dong, J.; Zhang, G.; Xiao, X. High resolution paddy rice maps in cloud-prone Bangladesh and Northeast India using Sentinel-1 data. Sci. Data 2019, 6, 1–10. [Google Scholar] [CrossRef]
- Shen, Y.; Li, Q.; Du, X.; Wang, H.Y.; Zhang, Y. Indicative features for identifying corn and soybean using remote sensing imagery at the middle and later growth season. J. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Veloso, A.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Planells, M.; Dejoux, J.-F.; Ceschia, E. Understanding the temporal behavior of crops using Sentinel-1 and Sentinel-2-like data for agricultural applications. Remote Sens. Environ. 2017, 199, 415–426. [Google Scholar] [CrossRef]
- Zhai, D.; Dong, J.; Cadisch, G.; Wang, M.; Kou, W.; Xu, J.; Xiao, X.; Abbas, S. Comparison of Pixel- and Object-Based Approaches in Phenology-Based Rubber Plantation Mapping in Fragmented Landscapes. Remote Sens. 2018, 10, 44. [Google Scholar] [CrossRef] [Green Version]
- Feng, Z.; Huang, G.; Chi, D. Classification of the Complex Agricultural Planting Structure with a Semi-Supervised Extreme Learning Machine Framework. Remote Sens. 2020, 12, 3708. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, J. Provincial agricultural stratification method for crop area estimation by remote sensing. Trans. Chin. Soc. Agric. Eng. 2013, 29, 184–191. [Google Scholar]
- Yi, Z.; Jia, L.; Chen, Q. Crop Classification Using Multi-Temporal Sentinel-2 Data in the Shiyang River Basin of China. Remote Sens. 2020, 12, 4052. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.L.; Ye, Y.X.; Yin, G.F.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Reedha, R.; Dericquebourg, E.; Canals, R.; Hafiane, A. Transformer Neural Network for Weed and Crop Classification of High Resolution UAV Images. Remote Sens. 2022, 14, 592. [Google Scholar] [CrossRef]
- Wang, D.; Cao, W.; Zhang, F.; Li, Z.; Xu, S.; Wu, X. A Review of Deep Learning in Multiscale Agricultural Sensing. Remote Sens. 2022, 14, 559. [Google Scholar] [CrossRef]










| Band Number | S2A | S2B | Spatial Resolution (m) | ||
|---|---|---|---|---|---|
| Center Wavelength (num) | Band Width (nm) | Center Wavelength (num) | Band Width (nm) | ||
| B1 | 443.9 | 27 | 442.3 | 45 | 60 |
| B2 | 496.6 | 98 | 492.1 | 98 | 10 |
| B3 | 560 | 45 | 559 | 46 | 10 |
| B4 | 664.5 | 38 | 665 | 39 | 10 |
| B5 | 703.9 | 19 | 703.8 | 20 | 20 |
| B6 | 740.2 | 18 | 739.1 | 18 | 20 |
| B7 | 782.5 | 28 | 779.7 | 28 | 20 |
| B8 | 835.1 | 145 | 833 | 133 | 10 |
| B8A | 864.8 | 33 | 864 | 32 | 20 |
| B9 | 945 | 26 | 943.2 | 27 | 60 |
| B10 | 1373.5 | 75 | 1376.9 | 76 | 60 |
| B11 | 1613.7 | 143 | 1610.4 | 141 | 20 |
| B12 | 2202.4 | 242 | 2185.7 | 238 | 20 |
| QA60 | 60 | ||||
| Corn | Soybeans | Rice | Building | Woodland | River | |
|---|---|---|---|---|---|---|
| Region 1 | 56 | 60 | 40 | 40 | 38 | 43 |
| Region 2 | 56 | 60 | 50 | 40 | 38 | 43 |
| Region 3 | 50 | 50 | 63 | 40 | 40 | 30 |
| Corn | Soybeans | Rice | Building | Woodland | River | |
|---|---|---|---|---|---|---|
| Region 1 | 115 | 121 | 100 | 80 | 75 | 86 |
| Region 2 | 88 | 82 | 88 | 84 | 78 | 80 |
| Region 3 | 100 | 100 | 126 | 80 | 78 | 60 |
| Vegetation Index | Formula | Reference |
|---|---|---|
| Normalized Difference Vegetation Index (NDVI) | Rouse et al. [35] | |
| Land Surface Water Index (LSWI) | Xiao et al. [36] | |
| Enhanced Vegetation Index (EVI) | Huete et al. [37] | |
| Modified Chlorophyll Absorption Ratio Index (MCARI) | Daughtry et al. [38] | |
| Ratio Vegetation Index (RVI) | Deering et al. [39] | |
| Difference Vegetation Index (DVI) | Richardson et al. [40] | |
| Triangular Vegetation Index (TVI) | Rouse et al. [35] | |
| Optimization Soil Adjusted Vegetation Index (OSAVI) | Rondeaux et al. [41] | |
| Green Chlorophyll Vegetation Index (GCVI) | Gitelson et al. [42] | |
| Red Edge Normalized Vegetation Index (RENDVI) | Gitelson et al. [43] | |
| Normalized Difference Tillage Index (NDTI) | Deventer et al. [44] | |
| Normalized Difference Senescent Vegetation Index (NDSVI) | Qi et al. [45] | |
| Green Vegetation Index (VIgreen) | Peña-Barragán et al. [46] | |
| Wide Dynamic Range Vegetation Index (WDRVI) | Gitelson et al. [47] | |
| Green Normalized Difference Vegetation Index (GNDVI) | Gitelson et al. [48] | |
| Normalized Difference Water Index (NDWI) | Gao et al. [49] |
| Model | Parameter Settings |
|---|---|
| SVM | kernelType: RBF; gamma: 0.8; cost: 50 |
| GBDT | numberOfTree: 100; samplingRate: 0.1; maxDepth: 6; shrinkage: 0.1 |
| RF | ntree: 100; mtry: 10 |
| MLC | data scale factor: 1.0 |
| The Crop Growth Stages | The Common Features in the Three Study Areas |
|---|---|
| April–June | B12, NDTI, LSWI, NDSVI |
| July–August | B12, B11, B8, LSWI, NRED2, RENDVI |
| September–early October | NDTI, B11, NDSVI |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, M.; Wang, H.; Zhang, Y.; Li, Q.; Du, X.; Shi, G.; Ren, Y. Investigating the Potential of Sentinel-2 MSI in Early Crop Identification in Northeast China. Remote Sens. 2022, 14, 1928. https://doi.org/10.3390/rs14081928
Wei M, Wang H, Zhang Y, Li Q, Du X, Shi G, Ren Y. Investigating the Potential of Sentinel-2 MSI in Early Crop Identification in Northeast China. Remote Sensing. 2022; 14(8):1928. https://doi.org/10.3390/rs14081928
Chicago/Turabian StyleWei, Mengfan, Hongyan Wang, Yuan Zhang, Qiangzi Li, Xin Du, Guanwei Shi, and Yiting Ren. 2022. "Investigating the Potential of Sentinel-2 MSI in Early Crop Identification in Northeast China" Remote Sensing 14, no. 8: 1928. https://doi.org/10.3390/rs14081928