
Performance Evaluation of Feature Matching Techniques for Detecting Reinforced Soil Retaining Wall Displacement


Abstract
:1. Introduction
2. Background and Objectives
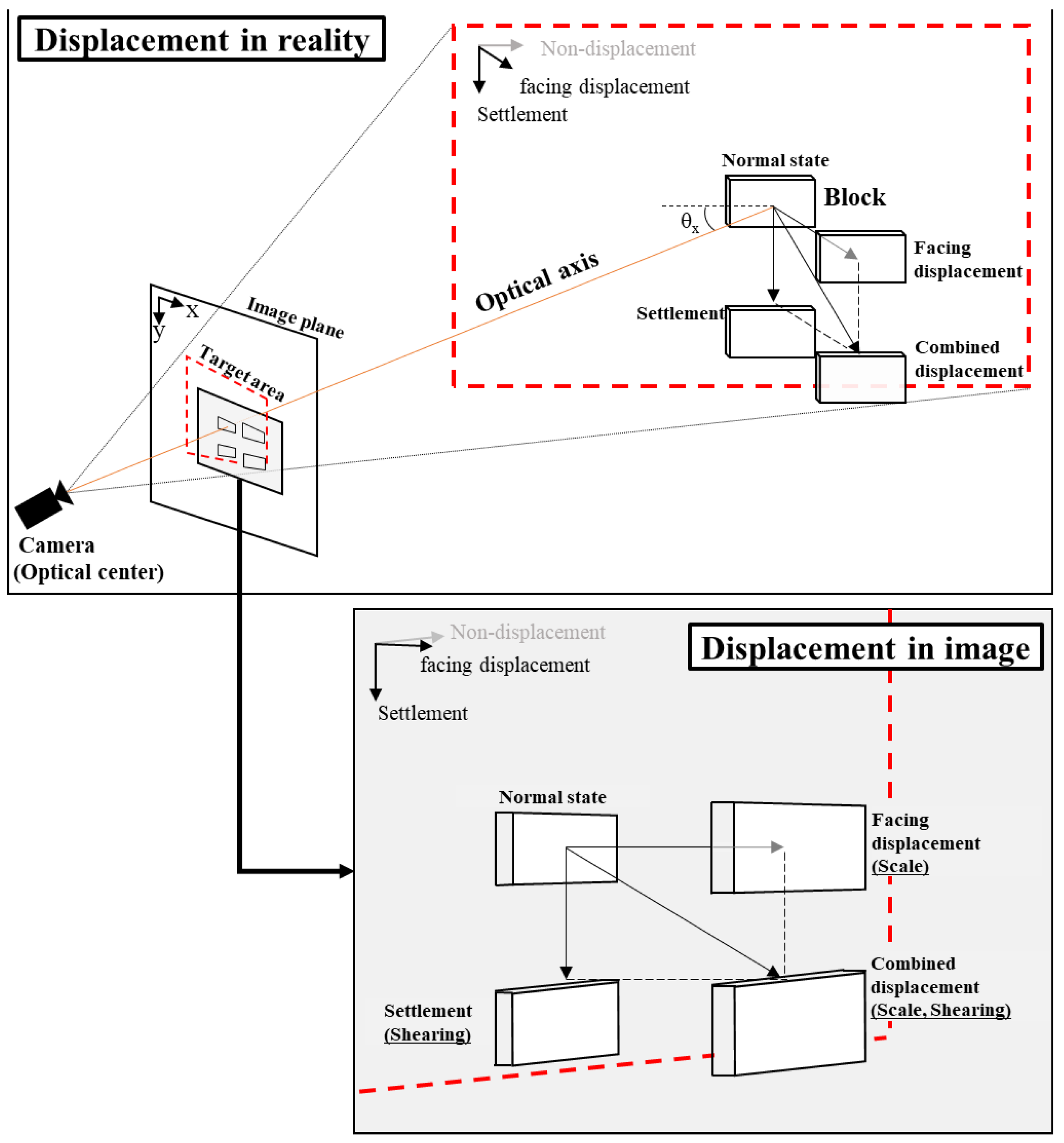
2.1. Behavior of RSW
2.2. Feature Detection and Matching
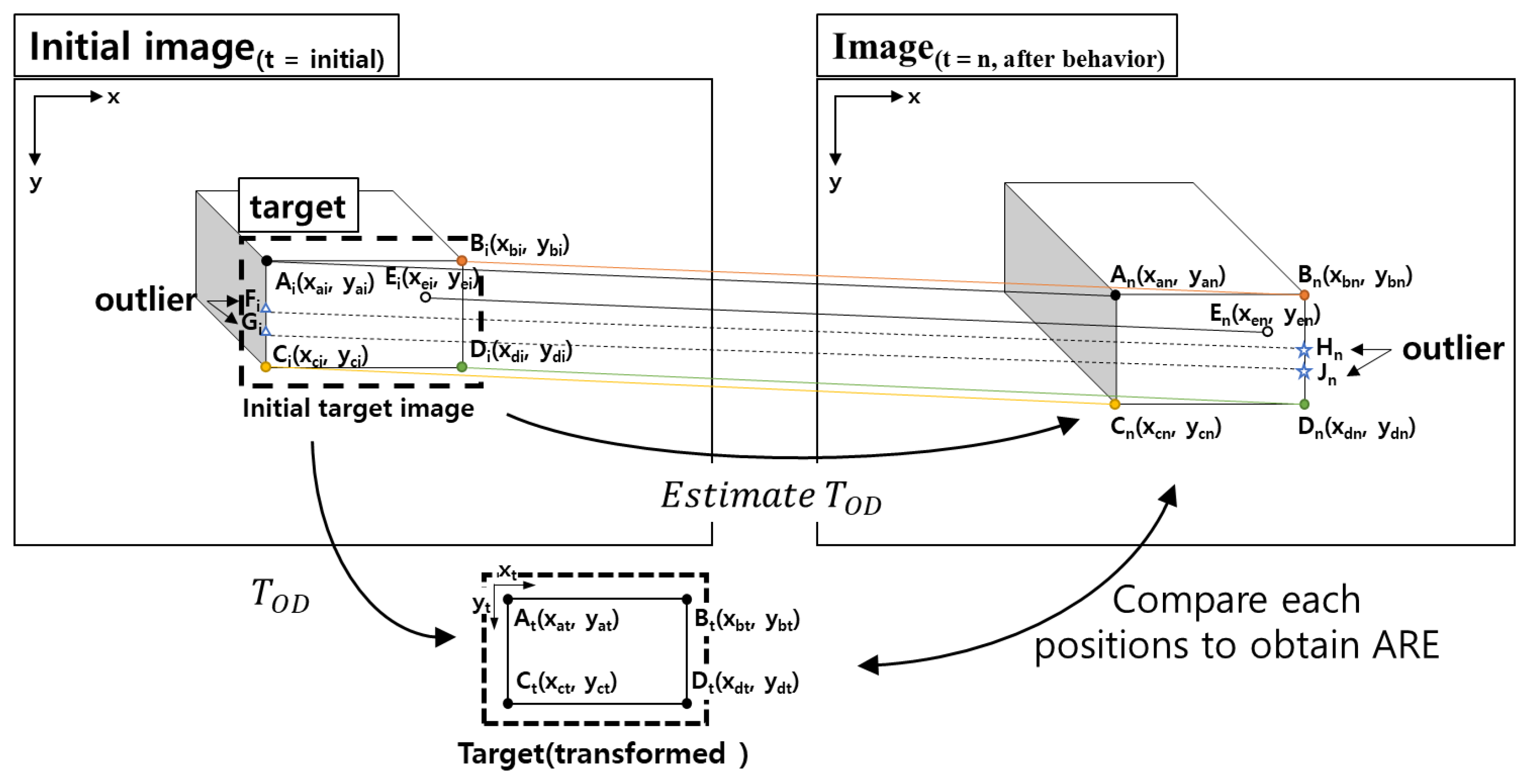
2.3. Feature Performance Evaluation
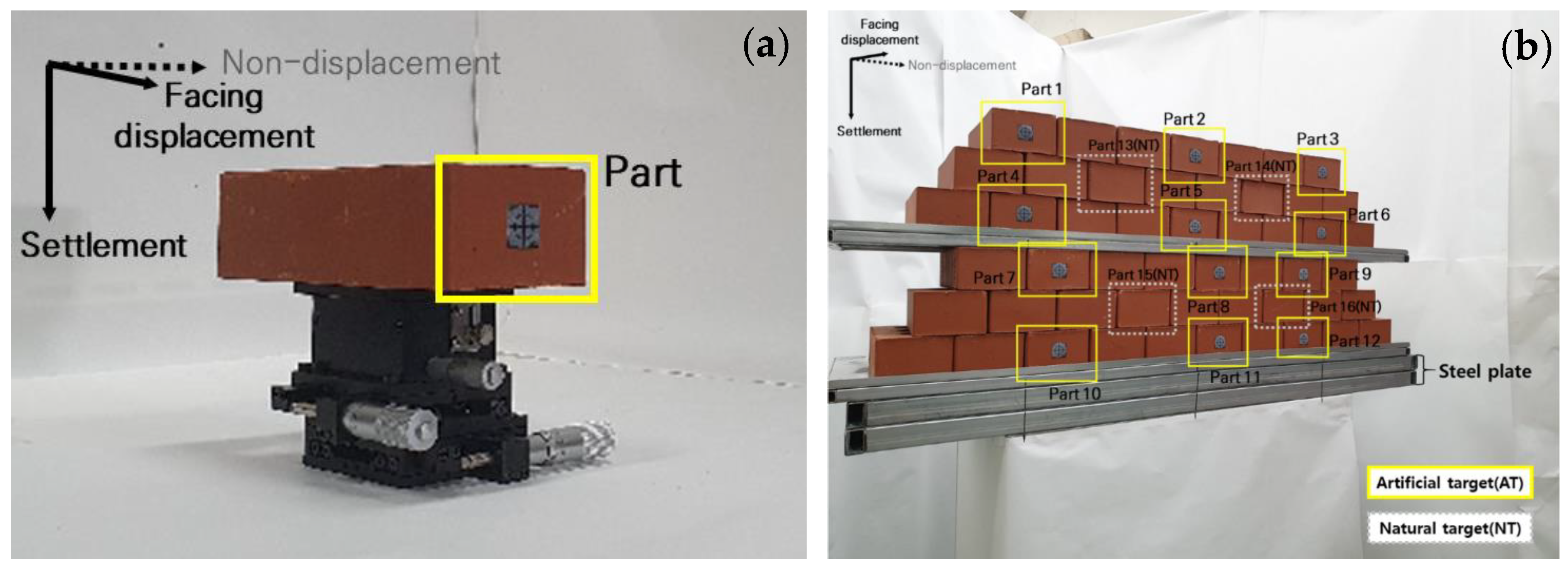
3. Laboratory Experiment
4. Experimental Results and Discussion
4.1. Single-Block Experiment
4.2. Multiblock Experiment
5. Conclusions
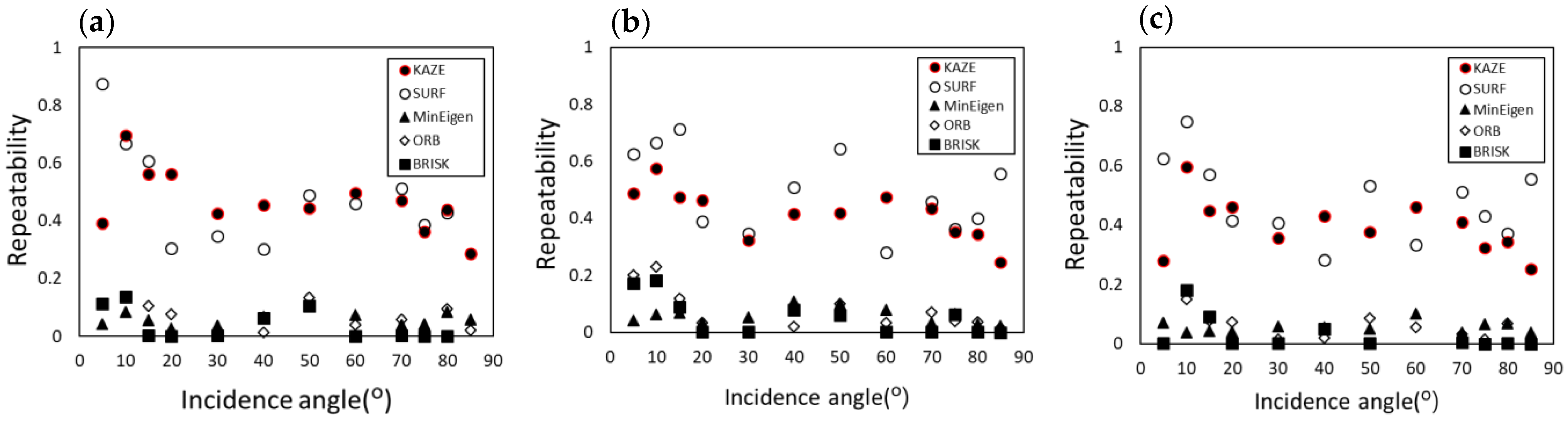
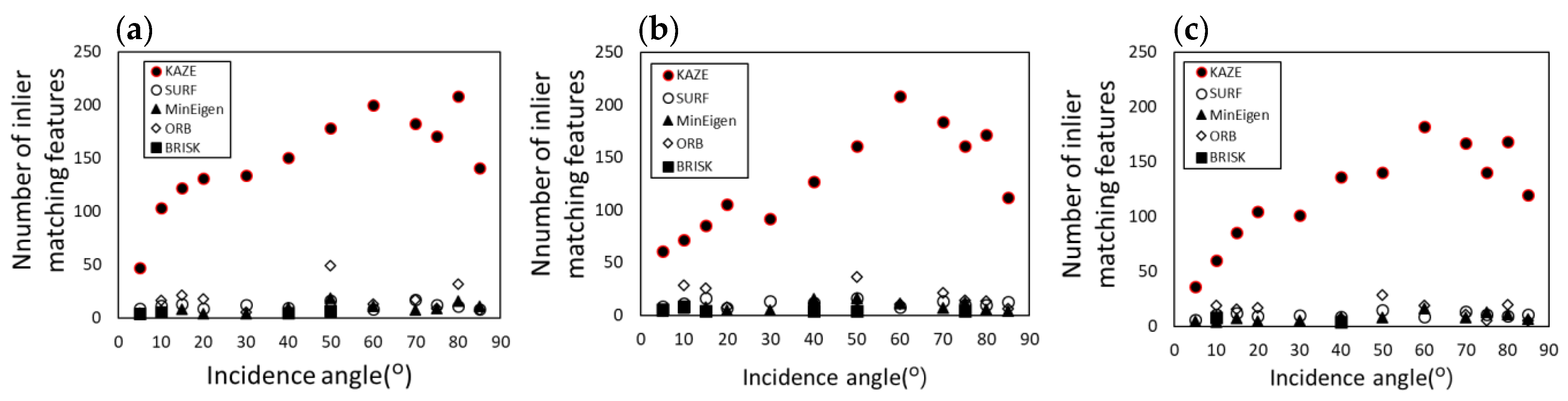
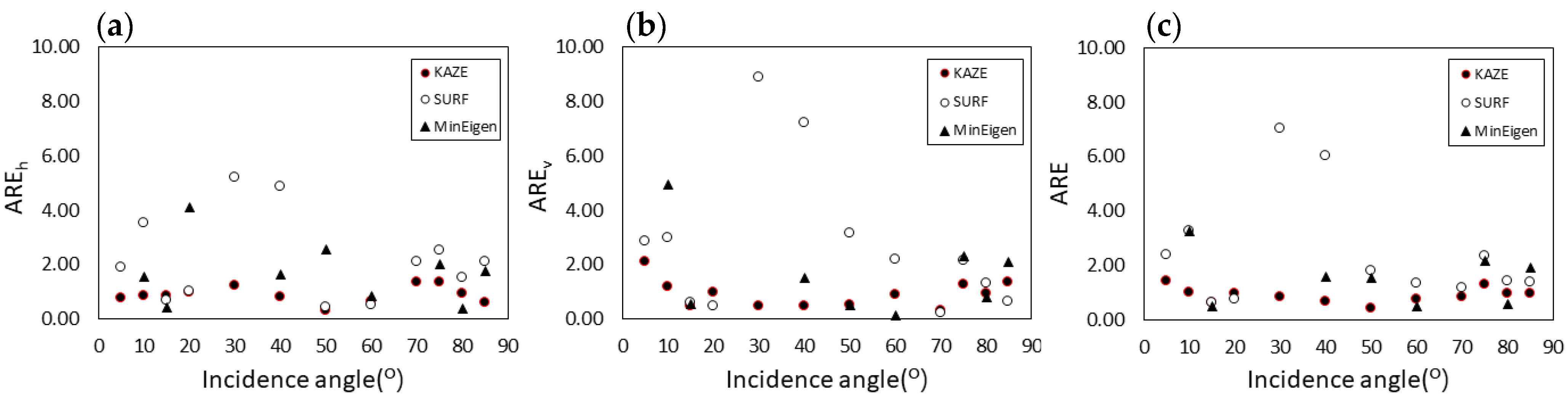
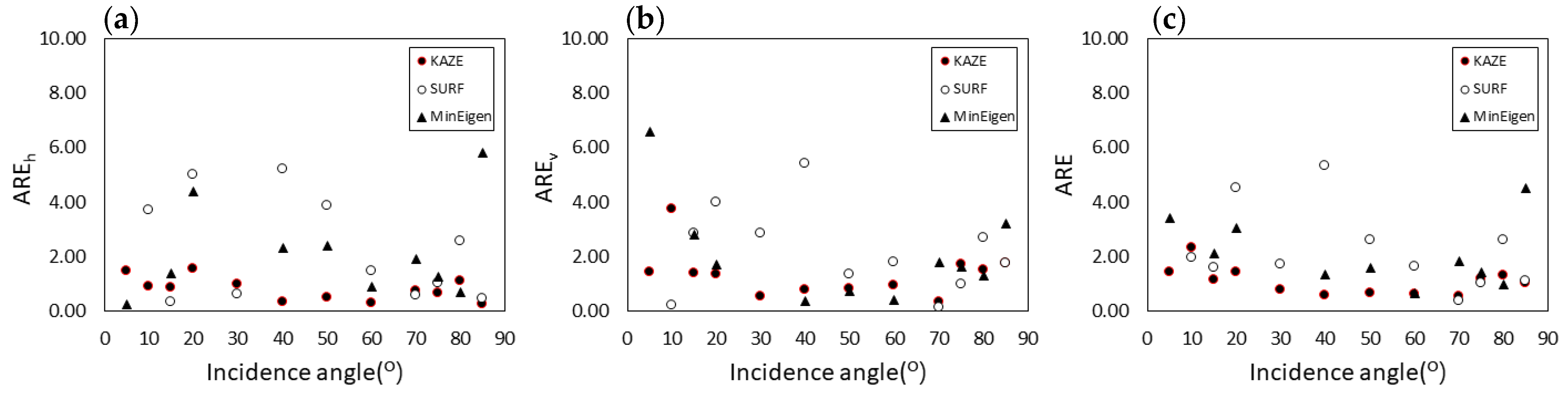
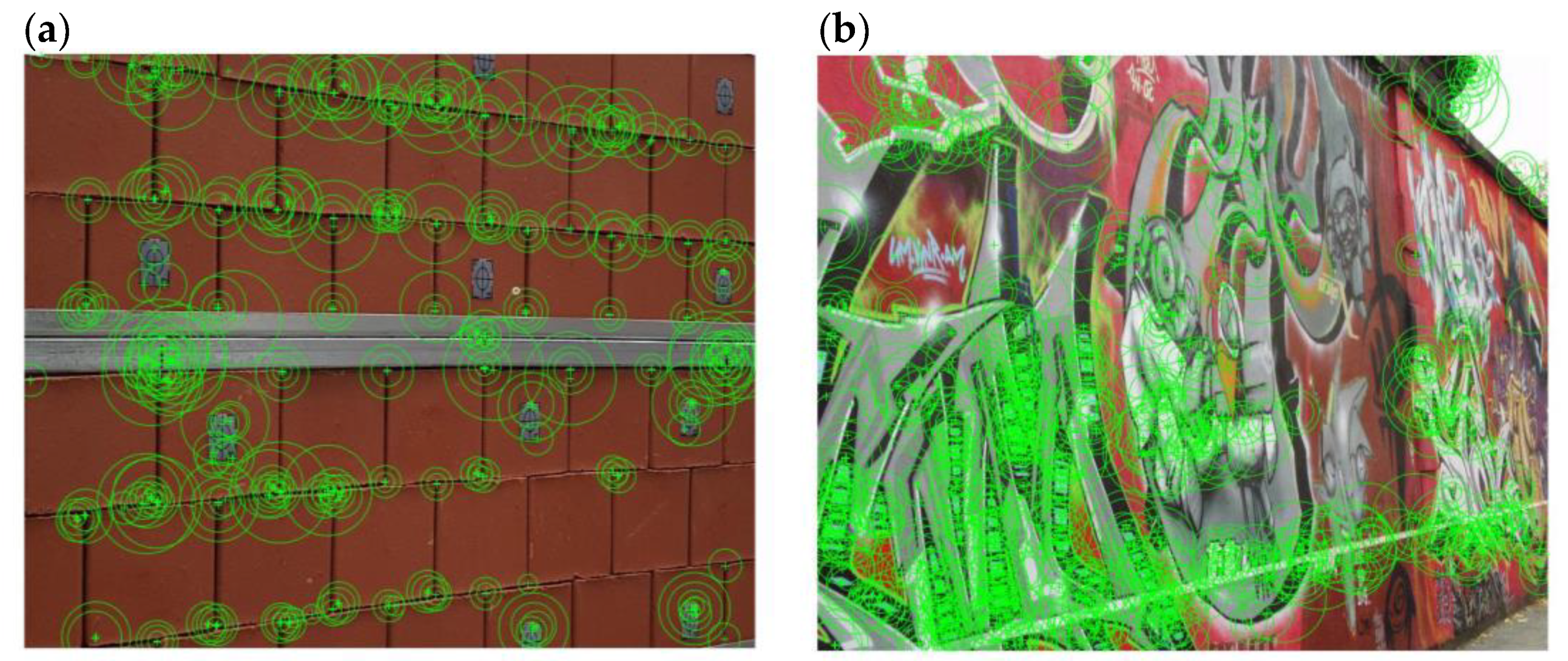
- Feature matching technology was applied to detect and match target changes in image pairs according to block behavior. Both the KAZE and SURF methods showed excellent performance in repeatability and matching score, which were based on the number of features. In particular, the KAZE method showed a remarkably large number of inlier matching features and obtained stable results at all incidence angles compared to other methods. In addition, ARE based on the position of the vertices of the block in the image pair (original image, transformed image) was the best in KAZE. Therefore, the KAZE method was selected as the best feature matching method, owing to its great ability (among the compared methods) to detect and match image changes based on the behavior of the block type.
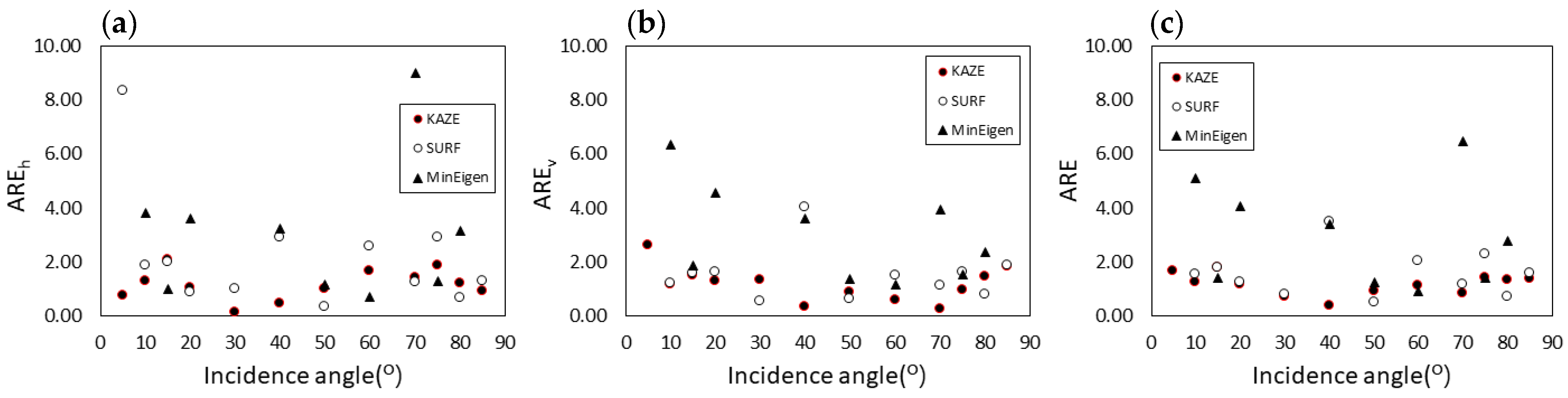
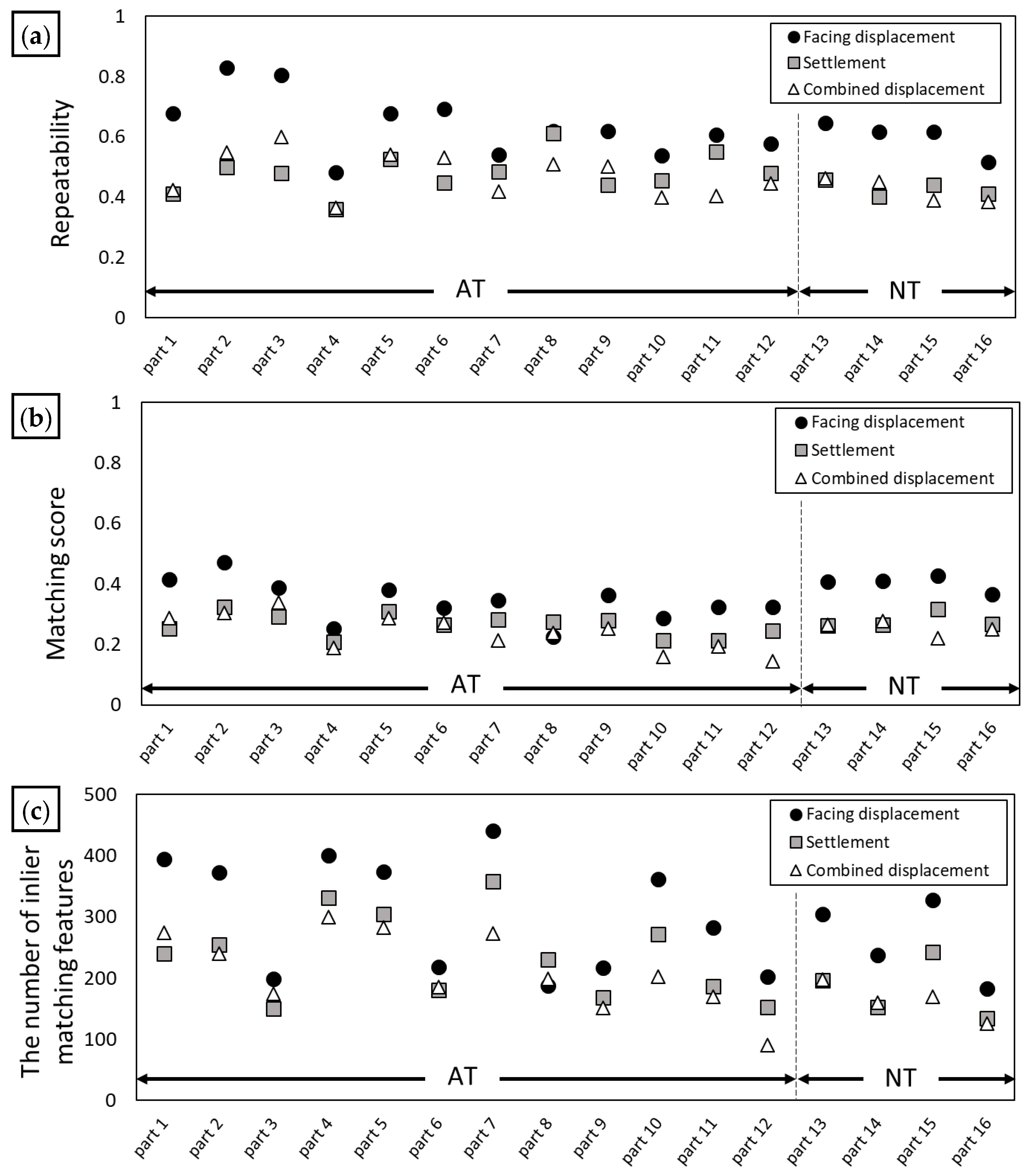
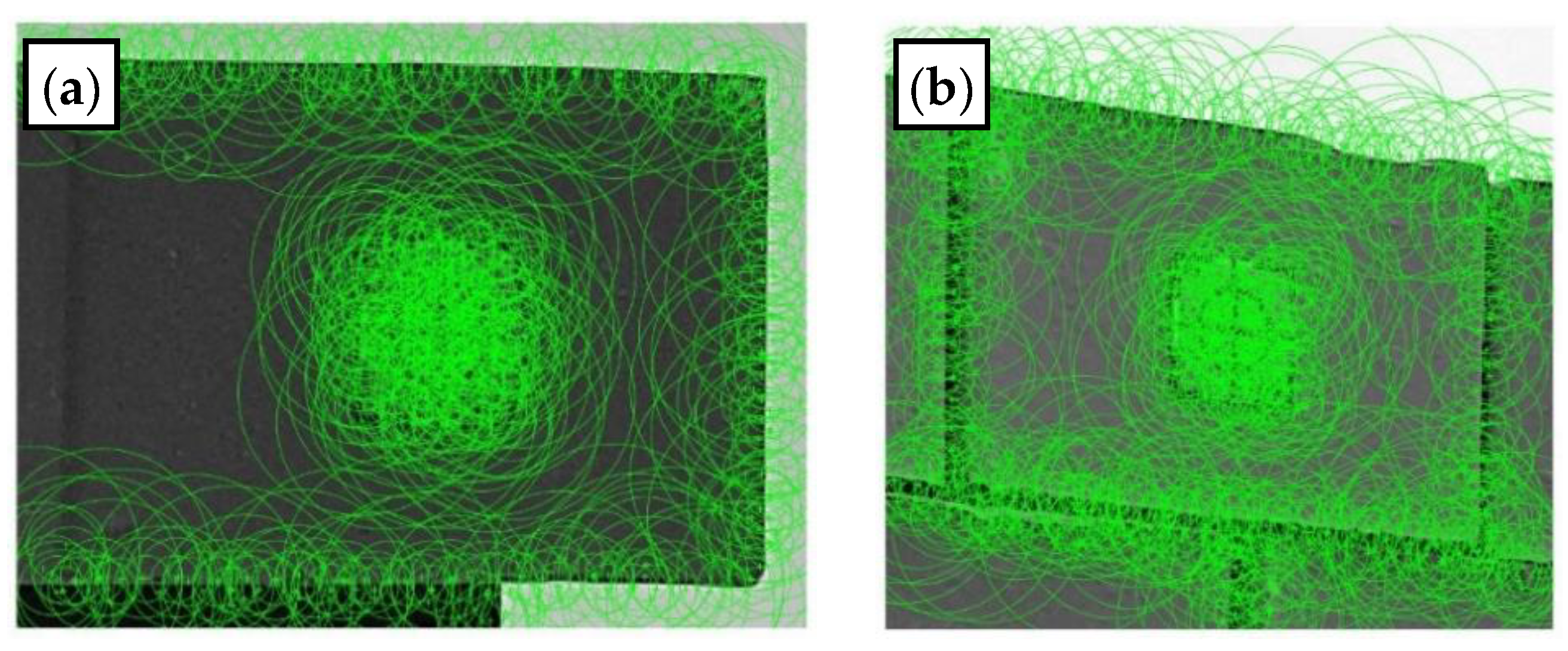
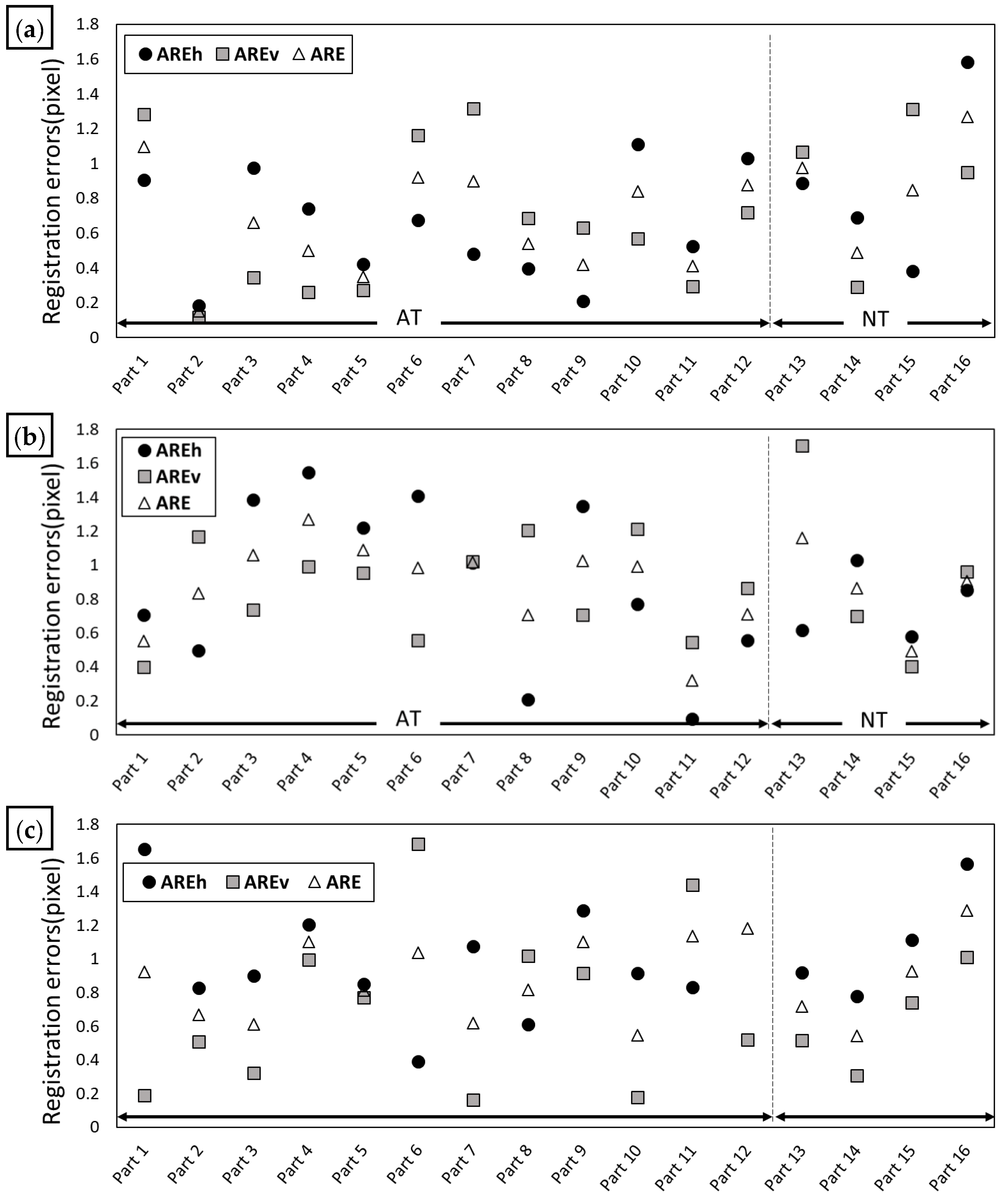
- The feature matching performance of the KAZE method was evaluated according to the behavior of multiple blocks where blocks were consecutively arranged. The repeatability, matching score, number of inlier matching features, and ARE showed excellent performance. All these results are similar to the single-block experiment results listed in Table 2. The KAZE results show that the matching performance of NTs (parts 13–16) was similar to that of ATs (parts 1–12). Therefore, the KAZE method could be applied to perform feature matching when evaluating the behavior of blocks in RSWs without installing ATs.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Anastasopoulos, I.; Georgarakos, T.; Georgiannou, V.; Drosos, V.; Kourkoulis, R. Seismic Performance of Bar-Mat Reinforced-Soil Retaining Wall: Shaking Table Testing Versus Numerical Analysis with Modified Kinematic Hardening Constitutive Model. Soil Dyn. Earthquake Eng. 2010, 30, 1089–1105. [Google Scholar] [CrossRef]
- KISTEC. Safety Inspection Manual for National Living Facilities; Korea Infrastructure Safety Corporation: Seoul, Korea, 2019; p. 6. [Google Scholar]
- Jang, D.J. Gwangju Apartment Retaining Wall Collapse, Dozens of Vehicles Sunk and Damaged, Yonhap News. 2015. Available online: https://www.yna.co.kr/view/AKR20150205012552054 (accessed on 5 February 2015).
- Kim, Y.R. Retaining Wall With ‘Good’ Safety Rating Also Collapsed, Korean Broadcasting System News. 2020. Available online: https://news.kbs.co.kr/news/view.do?ncd=5009697 (accessed on 22 September 2020).
- Laefer, D.; Lennon, D. Viability Assessment of Terrestrial LiDAR for Retaining Wall Monitoring. In Proceedings of the GeoCongress 2008, Orleans, LA, USA, 9–12 March 2008; pp. 247–254. [Google Scholar] [CrossRef] [Green Version]
- Hain, A.; Zaghi, A.E. Applicability of Photogrammetry for Inspection and Monitoring of Dry-Stone Masonry Retaining Walls. Transp. Res. Rec. 2020, 2674, 287–297. [Google Scholar] [CrossRef]
- Bathurst, R.J. Case study of a monitored propped panel wall. In Proceedings of the International Symposium on Geosynthetic-Reinforced Soil Retatining Walls, Denver, CO, USA, 8–9 August 1992; pp. 214–227. [Google Scholar]
- Sadrekarimi, A.; Ghalandarzadeh, A.; Sadrekarimi, J. Static and Dynamic Behavior of Hunchbacked Gravity Quay Walls. Soil Dyn. Earthq. Eng. 2008, 28, 2564–2571. [Google Scholar] [CrossRef]
- Yoo, C.S.; Kim, S.B. Performance of a Two-Tier Geosynthetic Reinforced Segmental Retaining Wall Under a Surcharge Load: Full-Scale Load Test and 3D Finite Element Analysis. Geotext. Geomembr. 2008, 26, 460–472. [Google Scholar] [CrossRef]
- Yang, G.; Zhang, B.; Lv, P.; Zhou, Q. Behaviour of Geogrid Reinforced Soil Retaining Wall With Concrete-Rigid Facing. Geotext. Geomembr. 2009, 27, 350–356. [Google Scholar] [CrossRef]
- Datteri, R.D.; Liu, Y.; D’Haese, P.F.; Dawant, B.M. Validation of a Nonrigid Registration Error Detection Algorithm Using Clinical MRI Brain Data. IEEE Trans. Med. Imaging 2015, 34, 86–96. [Google Scholar] [CrossRef] [Green Version]
- Gupta, S.; Chakarvarti, S.K.; Zaheeruddin, N.A. Medical Image Registration Based on Fuzzy c-means Clustering Segmentation Approach Using SURF. Int. J. Biomed. Eng. Technol. 2016, 20, 33–50. [Google Scholar] [CrossRef]
- Kaucha, D.P.; Prasad, P.W.C.; Alsadoon, A.; Elchouemi, A.; Sreedharan, S. Early Detection of Lung Cancer Using SVM Classifier in Biomedical Image Processing. In Proceedings of the IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, 21–22 September 2017; pp. 3143–3148. [Google Scholar] [CrossRef]
- Yang, W.; Zhong, L.; Chen, Y.; Lin, L.; Lu, Z.; Liu, S.; Wu, Y.; Feng, Q.; Chen, W. Predicting CT Image From MRI Data Through Feature Matching With Learned Nonlinear Local Descriptors. IEEE Trans. Med. Imaging 2018, 37, 977–987. [Google Scholar] [CrossRef]
- Wei, C.; Xia, H.; Qiao, Y. Fast Unmanned Aerial Vehicle Image Matching Combining Geometric Information and Feature Similarity. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1731–1735. [Google Scholar] [CrossRef]
- Regmi, K.; Shah, M. Bridging the Domain Gap for Ground-to-Aerial Image Matching. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 470–479. [Google Scholar] [CrossRef] [Green Version]
- Song, F.; Dan, T.T.; Yu, R.; Yang, K.; Yang, Y.; Chen, W.Y.; Gao, X.Y.; Ong, S.H. Small UAV-Based Multi-Temporal Change Detection for Monitoring Cultivated Land Cover Changes in Mountainous Terrain. Remote Sens. Lett. 2019, 10, 573–582. [Google Scholar] [CrossRef]
- Shao, Z.; Li, C.; Li, D.; Altan, O.; Zhang, L.; Ding, L. An Accurate Matching Method for Projecting Vector Data Into Surveillance Video to Monitor and Protect Cultivated Land. ISPRS Int. J. Geo Inf. 2020, 9, 448. [Google Scholar] [CrossRef]
- Thornton, S.; Dey, S. Machine Learning Techniques for Vehicle Matching with Non-Overlapping Visual Features. In Proceedings of the 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 18 November-16 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Tareen, S.A.K.; Saleem, Z. A Comparative Analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the 2018 IEEE International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Pieropan, A.; Bjorkman, M.; Bergstrom, N.; Kragic, D. Feature Descriptors for Tracking by Detection: A Benchmark. arXiv 2016, arXiv:1607.06178. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. A Performance Evaluation of Local Descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chien, H.J.; Chuang, C.C.; Chen, C.Y.; Klette, R. When to Use What Feature? SIFT, SURF, ORB, or A-KAZE Features for Monocular Visual Odometry. In Proceedings of the IEEE International Conference on Image and Vision Computing, Palmerston North, New Zealand, 21–22 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fukuda, Y. A Vision-Based Sensor for Noncontact Structural Displacement Measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.J.; Shinozuka, M. Real-Time Displacement Measurement of a Flexible Bridge Using Digital Image Processing Techniques. Exp. Mech. 2006, 46, 105–114. [Google Scholar] [CrossRef]
- Choi, H.S.; Cheung, J.H.; Kim, S.H.; Ahn, J.H. Structural Dynamic Displacement Vision System Using Digital Image Processing. NDT E Int. 2011, 44, 597–608. [Google Scholar] [CrossRef]
- Berg, R.R.; Christopher, B.R.; Samtani, N.C. Design of MSE walls. In Design and Construction of Mechanically Stabilized Earth Walls and Reinforced Soil Slopes; US Department of Transportation Federal Highway Administration: New Jersey, DC, USA, 2009; Volume 1, pp. 4.1–4.80. [Google Scholar]
- Koerner, R.M.; Koerner, G.R. An Extended Data Base and Recommendations Regarding 320 Failed Geosynthetic Reinforced Mechanically Stabilized Earth (MSE) Walls. Geotext. Geomembr. 2018, 46, 904–912. [Google Scholar] [CrossRef]
- Ji, R.; Gao, Y.; Duan, L.Y.; Hongxun, Y.; Dai, Q. Learning-Based Local Visual Representation and Indexing; Morgan Kaufmann: Burlington, MA, USA, 2015; pp. 17–40. [Google Scholar]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’94), Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded up Robust Features. In Proceedings of the 9th European Conference on Computer Vision (ECCV 2006), Graz, Austria, 7–13 May 2006; Volume 3951, pp. 404–417. [Google Scholar] [CrossRef]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust Invariant Scalable Keypoints. In Proceedings of the 2011 IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar] [CrossRef] [Green Version]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar] [CrossRef]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE Features. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 214–227. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Mikolajczyk, K. Scale & Affine Invariant Interest Point Detectors. Int. J. Comput. Vis. 2004, 60, 63–86. [Google Scholar] [CrossRef]
- Revaud, J.; Weinzaepfel, P.; de Souza, C.R.; Pion, N.; Csurka, G.; Cabon, Y.; Humenberger, M. R2D2: Repeatable and Reliable Detector and Descriptor. arXiv 2019, arXiv:1906.06195. [Google Scholar]
- Yi, K.M.; Trulls, E.; Lepetit, V.; Fua, P. Lift: Learned Invariant Feature Transform. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 467–483. [Google Scholar] [CrossRef] [Green Version]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superpoint: Self-Supervised Interest Point Detection and Description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 224–236. [Google Scholar] [CrossRef] [Green Version]
- Forsberg, D.; Farnebäck, G.; Knutsson, H.; Westin, C.F. Multi-Modal Image Registration Using Polynomial Expansion and Mutual Information. In Proceedings of the International Workshop on Biomedical Image Registration, Nashville, TN, USA, 7–8 July 2012; pp. 40–49. [Google Scholar] [CrossRef]
- Schmidt-Richberg, A.; Ehrhardt, J.; Werner, R.; Handels, H. Fast Explicit Diffusion for Registration With Direction-Dependent Regularization. In Proceedings of the International Workshop on Biomedical Image Registration, Nashville, TN, USA, 7–8 July 2012; pp. 220–228. [Google Scholar] [CrossRef]
- Wang, Z.; Kieu, H.; Nguyen, H.; Le, M. Digital Image Correlation in Experimental Mechanics and Image Registration in Computer Vision: Similarities, Differences and Complements. Opt. Lasers Eng. 2015, 65, 18–27. [Google Scholar] [CrossRef]
- Esmaeili, F.; Varshosaz, M.; Ebadi, H. Displacement Measurement of the Soil Nail Walls by Using Close Range Photogrammetry and Introduction of CPDA Method. Measurement 2013, 46, 3449–3459. [Google Scholar] [CrossRef]
- Zhao, S.; Kang, F.; Li, J. Displacement Monitoring for Slope Stability Evaluation Based on Binocular Vision Systems. Optik 2018, 171, 658–671. [Google Scholar] [CrossRef]
- Visual Geometry Group. Affine Covariant Regions Datasets. 2004. Available online: http://www.robots.ox.ac.uk/~vgg/data (accessed on 15 July 2007).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Facing Displacement | Settlement | Combined Displacement | ||||
|---|---|---|---|---|---|---|---|
| Average | Standard Deviation | Average | Standard Deviation | Average | Standard Deviation | ||
| AREh | KAZE | 0.87 | 0.31 | 1.14 | 0.57 | 0.80 | 0.43 |
| SURF | 2.19 | 1.59 | 2.16 | 2.13 | 3.35 | 4.21 | |
| MinEigen | 24.45 | 42.26 | 71.77 | 226.51 | 9.34 | 17.52 | |
| AREv | KAZE | 0.89 | 0.51 | 1.17 | 0.66 | 1.36 | 0.88 |
| SURF | 2.71 | 2.72 | 2.35 | 3.13 | 4.55 | 8.35 | |
| MinEigen | 24.92 | 50.25 | 67.76 | 195.74 | 11.59 | 22.77 | |
| ARE | KAZE | 0.88 | 0.28 | 1.15 | 0.40 | 1.08 | 0.52 |
| SURF | 2.45 | 2.05 | 2.25 | 2.60 | 3.95 | 6.17 | |
| MinEigen | 24.68 | 42.76 | 69.76 | 210.89 | 10.47 | 19.59 | |
| Comparison Matrix | Single-Block Experiment (at Incidence Angle = 50–80°) | Multiblock Experiment | ||
|---|---|---|---|---|
| Min. | Max. | Min. | Max. | |
| Repeatability | 0.3247 | 0.4965 | 0.3599 | 0.8289 |
| Matching score | 0.2131 | 0.3654 | 0.1449 | 0.4715 |
| Number of inlier matching features | 139.9 | 208.4 | 90 | 440 |
| Average of All Displacement Types | Repeatability | Matching Score | No. of Inlier Matching Points | ARE |
|---|---|---|---|---|
| AT (Parts 1–12) | 0.53 | 0.28 | 250 | 0.8 |
| NT (Parts 13–16) | 0.48 | 0.31 | 203 | 0.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, Y.-S.; Lee, J.; Kim, Y.-T. Performance Evaluation of Feature Matching Techniques for Detecting Reinforced Soil Retaining Wall Displacement. Remote Sens. 2022, 14, 1697. https://doi.org/10.3390/rs14071697
Ha Y-S, Lee J, Kim Y-T. Performance Evaluation of Feature Matching Techniques for Detecting Reinforced Soil Retaining Wall Displacement. Remote Sensing. 2022; 14(7):1697. https://doi.org/10.3390/rs14071697
Chicago/Turabian StyleHa, Yong-Soo, Jeongki Lee, and Yun-Tae Kim. 2022. "Performance Evaluation of Feature Matching Techniques for Detecting Reinforced Soil Retaining Wall Displacement" Remote Sensing 14, no. 7: 1697. https://doi.org/10.3390/rs14071697