
Method for Estimating the Optimal Coefficient of L1C/B1C Signal Correlator Joint Receiving

 ,
,
Abstract
:1. Introduction
2. The Mathematical Model and Characteristics of the B1C/L1C Signal
2.1. The Characteristic of Autocorrelation
2.2. Code Tracking Accuracy
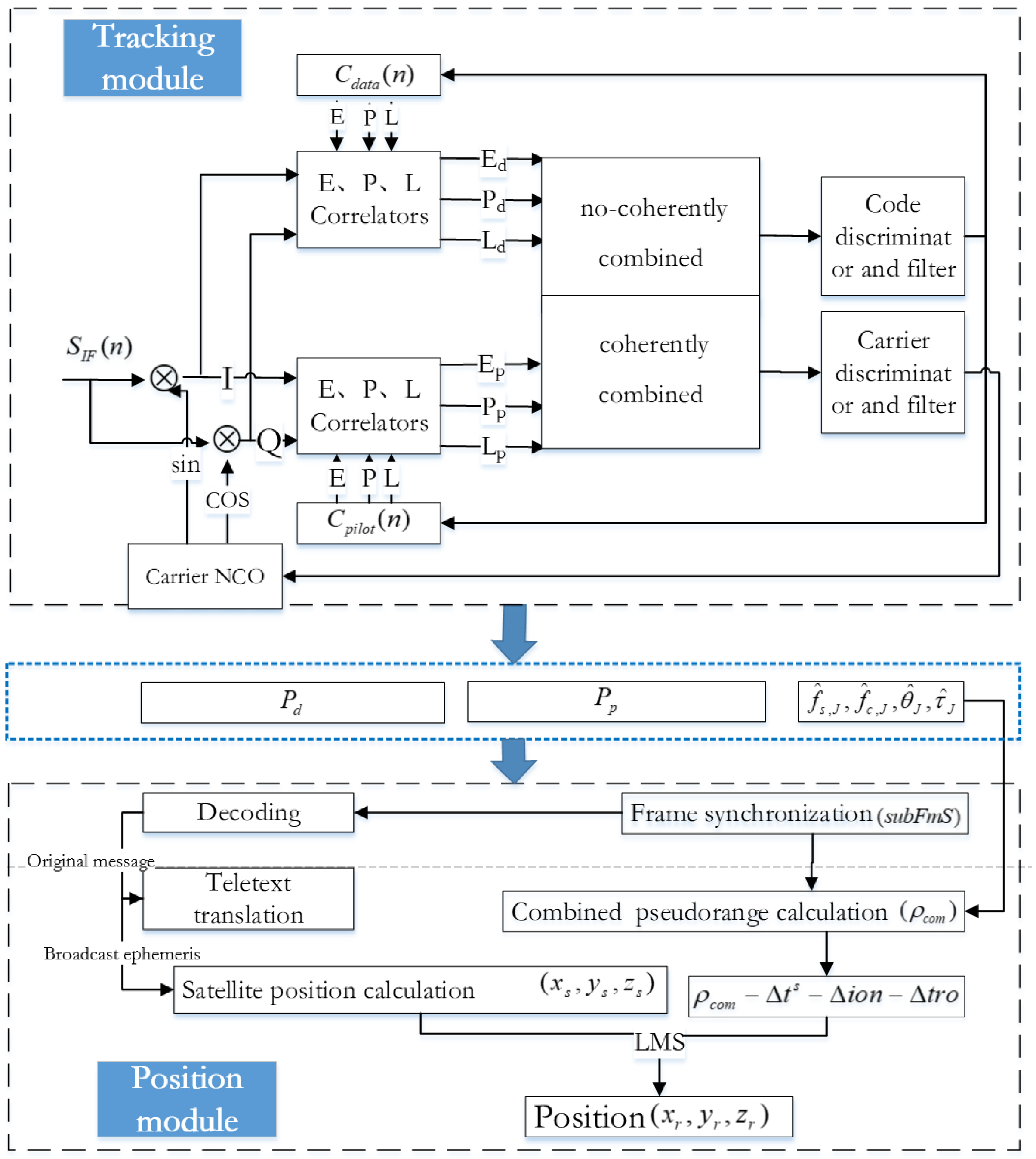
3. The Joint Receiving Scheme of Correlator
3.1. Correlator Joint Receiving Algorithm
3.2. Optimal Coefficient Estimation of Carrir Loop
3.3. Optimal Coefficient Estimation of Code Loop
4. Experiment and Analysis
4.1. Joint Tracking Results
4.2. Carrier-to-Noise Ratio Estimation of Combined Signals
4.3. Joint Positioning Accuracy
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, X.; Tang, Z.; Zhou, H. Summarization of Design Ideas of GPS and Galileo Signal System. Syst. Eng. Electron. 2009, 31, 2285–2293. [Google Scholar]
- Zhang, Q.; Zhu, Y.; Chen, Z. An In-Depth Assessment of the New BDS-3 B1C and B2a Signals. Remote Sens. 2021, 13, 788. [Google Scholar] [CrossRef]
- Zhuo, J.; An, J.; Wan, A. Signal structure and Performance Evaluation of the New CDMA Navigation signal in russion GLONASS System. Digit. Commun. World 2012, 4. [Google Scholar]
- Guo, Y.; Wang, X.; Lu, X.; Rao, Y.; He, C. Algorithm Research on High-Precision Tracking of Beidou-3 B1C Signal; Springer: Singapore, 2019; pp. 453–457. [Google Scholar] [CrossRef]
- Salgueiro, F.; Luise, M.; Zanier, F.; Crosta, P. Pilot-aided GNSS data demodulation performance in realistic channels and urban live tests. In Proceedings of the 2016 8th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 14–16 December 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Borio, D.; O’Driscoll, C.; Lachapelle, G. Coherent, noncoherent, and differentially coherent combining techniques for acquisition of new composite GNSS signals. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1227–1240. [Google Scholar] [CrossRef]
- Hegarty, C.J. Optimal and Near-optimal Detectors for Acquisition of the GPS L5 Signal. In Proceedings of the 2006 National Technical Meeting of The Institute of Navigation, Monterey, CA, USA, 18–20 January 2006. [Google Scholar]
- Daniele, B. A Statistical Theory for GNSS Signal Acquisition. Ph.D. Thesis, Politecnico Di Torino, Piedmont, Italy, 2008. [Google Scholar]
- Ta, T.H.; Dovis, F.; Margaria, D.; Presti, L.L. Comparative Study on Joint Data/Pilot Strategies for High Sensitivity Galileo E1 Open Service Signal Acquisition. IET Radar Sonar Navig. 2010, 4, 764–779. [Google Scholar] [CrossRef]
- Borio, D.; Presti, L.L. Data and Pilot Combining for Composite GNSS Signal Acquisition. Int. J. Navig. Obs. 2008, 2008, 738183. [Google Scholar] [CrossRef] [Green Version]
- Julien, O. Carrier-Phase Tracking of Future Data/Pilot Signals. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Muthuraman, K.; Shanmugam, S.K.; Lachapelle, G. Evaluation of Data/Pilot Tracking Algorithms for GPS L2C Signals Using Software Receiver. In Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007. [Google Scholar]
- Muthuraman, K.; Klukas, R.; Lachapelle, G. Performance Evaluation of L2C Data/Pilot Combined Carrier Tracking. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Liu, Y.; Hong, L.; Cui, X.; Lu, M. A tracking method for GPS L2C signal based on the joint using of data and pilot channels. In Proceedings of the 2014 11th International Computer Conference on Wavelet Actiev Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 19–21 December 2014; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Ries, L.; Macabiau, C.; Nouvel, O. A Software Receiver for GPS-IIF L5 Signal. In Proceedings of the ION GPS, Portland, OR, USA, 24–27 September 2002. [Google Scholar]
- Siddiqui, B.A.; Jie, Z.; Bhuiyan, M.; Lohan, E.S. Joint Data-Pilot acquisition and tracking of Galileo E1 Open Service signal. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service, Helsinki, Finland, 14–15 October 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Zhang, Z.; Meng, Y.; Zhang, L.; Zgang, W. A novel combining tracking scheme for MBOC signal. In Proceedings of the International Conference on Electronics, Beirut, Lebanon, 11–14 December 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Zhang, Z.Y.; Zhang, L.X.; Meng, Y.S.; Zhang, W. The Study of Combining Tracking for MBOC Signal. In Proceedings of the 2011 International Conference on Electronics, Communications and Control (ICECC), Ningbo, China, 9–11 September 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Linfeng, Z.H.; Haibo, H.E.; Lin, L.I. Characteristic Analysis and Comparison of Beidou B1C Signal. Mod. Navig. 2018, 2, 80. [Google Scholar] [CrossRef]
- Steigenberger, P.; Thoelert, S.; Montenbruck, O. GPS iii Vespucci: Results of half a year in orbit. Adv. Space Res. 2020, 66, 2776–2777. [Google Scholar] [CrossRef]
- Crosta, P.; Pirazzi, G. A simplified convolutional decoder for GALILEO OS: Performance evaluation with a GALILEO mass-market receiver in live scenario. In Proceedings of the 2016 8th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 14–16 December 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Lu, M.; Li, W.; Yao, Z.; Cui, X. Overview of BDS III new signals. Navigation. J. Inst. Navig. 2019, 66, 19–21. [Google Scholar] [CrossRef] [Green Version]
- Yan-ling, Z.; Dai-ping, W. CBOC Modulation and its Performance Analysis. Telecommun. Eng. 2010, 50, 21–25. [Google Scholar] [CrossRef]
- Yao, Z.; Lu, M.; Feng, Z.M. Quadrature multiplexed BOC modulation for interoperable GNSS signals. Electron. Lett. 2010, 46, 1234–1236. [Google Scholar] [CrossRef]
- Li, Y.; Shivaramaiah, N.C.; Akos, D.M. Design and implementation of an open-source BDS-3 B1C/B2a SDR receiver. GPS Solut. 2019, 23, 1–16. [Google Scholar] [CrossRef]
- Zhao, L.; Bo, Y.; Ding, J. EKF-Based Beidou B1C Signal Data/Pilot Joint Tracking Method; GNSS World of China: Xinxiang, China, 2020. [Google Scholar]
- Hao, W.; Gong, W. Research on Tracking Algorithm of Beidou B1C Signal. In Proceedings of the 2019 IEEE 9th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 12–14 July 2019; pp. 226–229. [Google Scholar] [CrossRef]
- Ji, Z.; Chan, L. Joint data-pilot acquisition of GPS L1 civil signal. In Proceedings of the 2014 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Yan, S.; Dong, L.; Zhang, Y. Joint Data/Pilot Tracking Techniques for the Modern Beidou B1C Signal. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications (ICCC), Chengdu, China, 7–10 December 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Florence, M.G.; Petovello, M.G.; Gérard, L. Combined acquisition and tracking methods for GPS L1 C/A and L1C signals. Int. J. Navig. Obs. 2010, 2010, 190465. [Google Scholar]
- Li, W.; Qian, T.; Wang, Y.; Huang, C. Constant False Alarm Rate Acquisition Algorithm for Compass B1C Signal. China Commun. 2019, 16, 11. [Google Scholar] [CrossRef]
- Huang, X.; Wang, X. Performance Analysis on no-coherent Joint Acquisition performance of MBOC Signals. J. Time Freq. 2019, 42, 10. [Google Scholar]
- Ting, F.; Tang, X. Power-weighted combining acquisition algorithm with data and pilot signals. J. Nation Univ. Def. Technol. 2016, 38, 5. [Google Scholar] [CrossRef]
- Wu, T.; Tang, X. Beidou B1C Signal Joint Acquisition Strategy; GNSS World of China: Xinxiang, China, 2020; Volume 45, p. 9. [Google Scholar]
- Zheng, Y.; Mingquan, L. Signal Design Principle and Implementation Technology of New Generation Satellite Navigation System; Monograph; Electronic Industry Press: Beijing, China, 2016. [Google Scholar]
- Sliarawi, M.S.; Akos, D.M.; Aloi, D.N. GPS C/N0 Estimation in the Presence of Interference and Limited Quantization Levels. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 227–238. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NUM | Signal Name | Modulation | Power Distribution | Phase Relationship |
|---|---|---|---|---|
| 1 | B1C | BOC (1,1) | 1:3 | orthogonal |
| QMBOC (6,1,4/33) | ||||
| 2 | L1C | BOC (1,1) | 1:3 | Same (GPS, QZS 2~4), Orthogonal (QZS1) |
| TMBOC (6,1,4/33) (GPS, QZS 2~4) BOC (1,1) (QZS1) |
| 1:1 Combination | Amplitude Ratio Combination | Power Ratio Combination |
|---|---|---|
| NUM | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Combination scheme | data component tracking | pilot component tracking | 1:1 combination | power ratio combination | Amplitude ratio combination |
| 1 | 1.47 | 3.33 | 2.24 | 1.24 | 1.52 | 3.80 | 1.37 × 10−5 | 1.34 × 10−5 | 3.80 |
| 2 | 0.97 | 2.10 | 1.52 | 0.81 | 0.99 | 2.46 | 8.96 × 10−6 | 8.80 × 10−6 | 2.46 |
| 3 | 0.88 | 1.89 | 1.39 | 0.75 | 0.90 | 2.22 | 8.12 × 10−6 | 8.12 × 10−6 | 2.22 |
| 4 | 0.87 | 1.88 | 1.38 | 0.73 | 0.89 | 2.21 | 8.07 × 10−6 | 7.96 × 10−6 | 2.21 |
| 5 | 0/86 | 1.85 | 1.36 | 0.72 | 0.88 | 2.17 | 7.98 × 10−6 | 7.91 × 10−6 | 2.17 |
| 1 | 15.21 | 14.23 | 3.55 | 14.18 | 7.90 | 13.52 | 7.07 × 10−5 | 1.54 × 10−5 | 13.52 |
| 2 | 9.29 | 9.0 | 2.15 | 8.41 | 5.04 | 8.70 | 4.51 × 10−6 | 9.15 × 10−6 | 8.70 |
| 3 | 8.18 | 7.91 | 1.87 | 7.30 | 4.51 | 7.70 | 4.04 × 10−6 | 7.94 × 10−6 | 7.70 |
| 4 | 8.12 | 7.83 | 1.86 | 7.29 | 4.45 | 7.60 | 3.98 × 10−6 | 7.93 × 10−6 | 7.60 |
| 5 | 7.95 | 7.71 | 1.81 | 7.08 | 4.40 | 7.51 | 3.94 × 10−6 | 7.70 × 10−6 | 7.51 |
| Signal | 3/1(%) | 4/1(%) | 5/1(%) | 3/2(%) | 4/2(%) | 5/2(%) | 5/2–3/2(%) | 5/2–4/2(%) |
|---|---|---|---|---|---|---|---|---|
| B1C | 41.265 | 41.727 | 42.560 | 9.434 | 10.147 | 11.431 | 2 | 1.3 |
| L1C | 45.417 | 45.886 | 46.886 | 12.001 | 12.765 | 14.377 | 2.37 | 1.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zou, D.; Wang, X.; Rao, Y.; Shang, P.; Chu, Z.; Lu, X. Method for Estimating the Optimal Coefficient of L1C/B1C Signal Correlator Joint Receiving. Remote Sens. 2022, 14, 1401. https://doi.org/10.3390/rs14061401
Guo Y, Zou D, Wang X, Rao Y, Shang P, Chu Z, Lu X. Method for Estimating the Optimal Coefficient of L1C/B1C Signal Correlator Joint Receiving. Remote Sensing. 2022; 14(6):1401. https://doi.org/10.3390/rs14061401
Chicago/Turabian StyleGuo, Yao, Decai Zou, Xue Wang, Yongnan Rao, Peng Shang, Ziyue Chu, and Xiaochun Lu. 2022. "Method for Estimating the Optimal Coefficient of L1C/B1C Signal Correlator Joint Receiving" Remote Sensing 14, no. 6: 1401. https://doi.org/10.3390/rs14061401