
Ka-Band Doppler Scatterometry: A Strong Wind Case Study


Abstract
:1. Introduction
2. Data and Methods
2.1. Experiment Site
2.2. Instruments
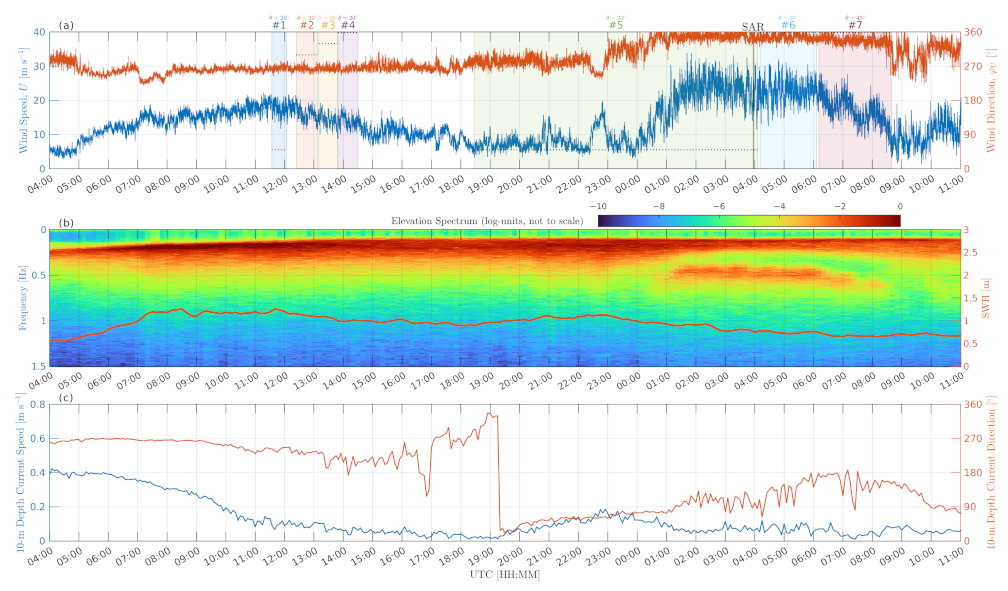
2.3. Data Records
2.4. General Definitions
3. Sea Surface Cross-Section
3.1. Sea Spray Signatures
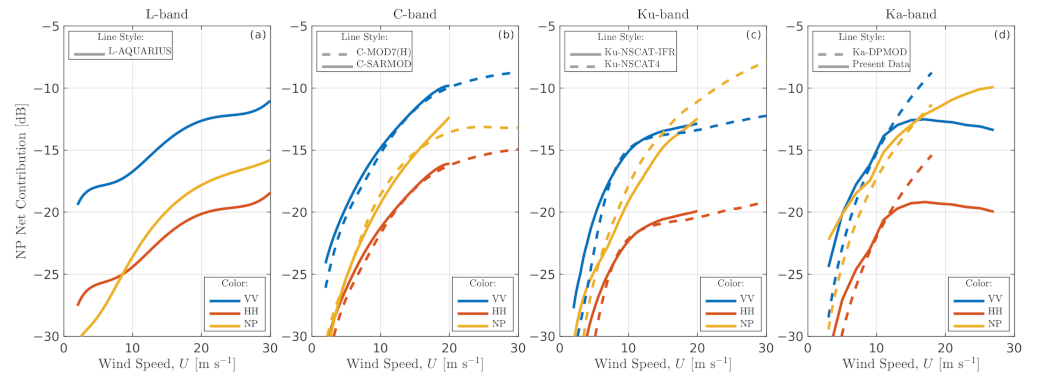
3.2. NRCS Decomposition
- Ka-DPMOD, the Ka-band dual-co-polarized GMF based on data obtained with the same experiment setup as in the present study;
- Ka-TSM, the two-scale (TSM) resonant Bragg model based on the radar imaging model (RIM) [50].
- L-AQUARIUS, L-band (1.4 GHz) GMF inferred from Aquarius scatterometer data [51];
- C-SARMOD, C-band (5.255 GHz) GMF based on joint VV and HH data from Envisat Advanced SAR (ASAR), Radarsat-2, and Sentinel-1 SARs [52] for ;
- Ku-NSCAT-IFR, Ku-band GMF developed by the French Research Institute for Exploitation of the Sea (IFREMER) for NSCAT scatterometer data [55];
- Ku-NSCAT4, Ku-band GMF (version 4) developed by the Royal Netherlands Meteorological Institute (KNMI) for NSCAT scatterometer data [44].
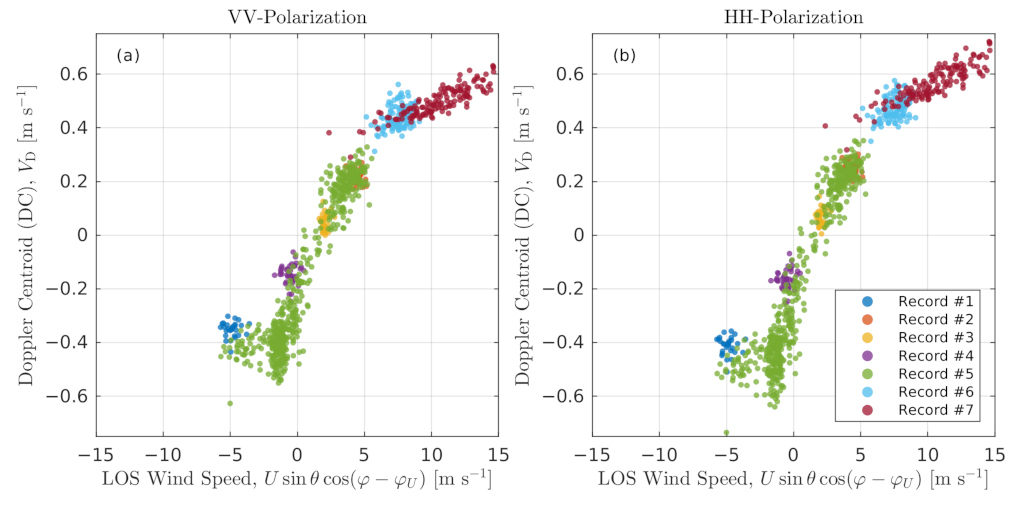
4. Sea Surface Doppler Centroid
4.1. The KaDOP Approach
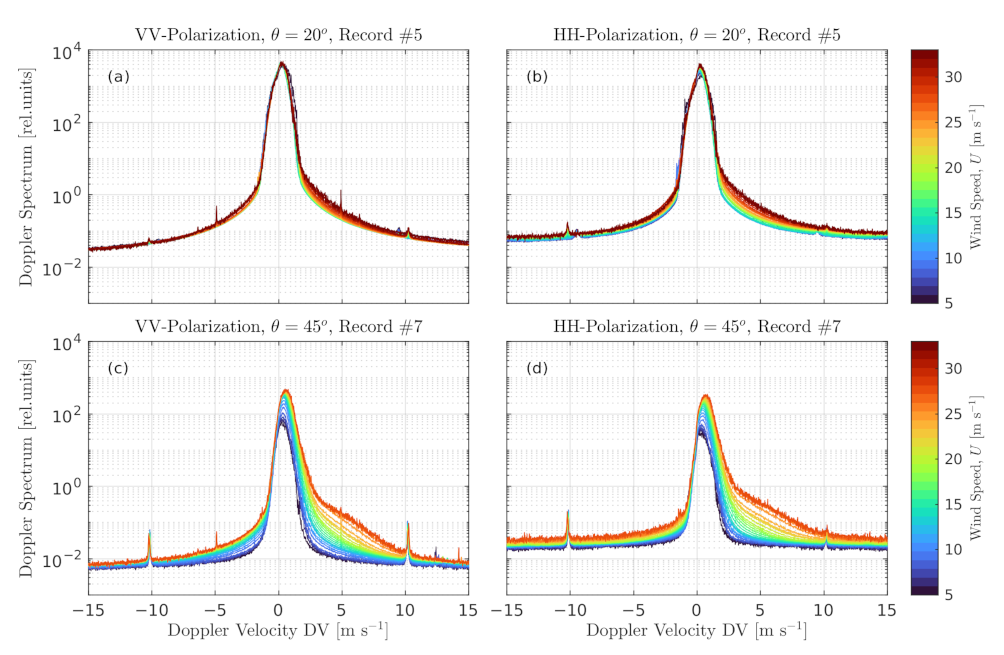
4.2. Small Incidence Angle (Record #5)
4.3. Moderate Incidence Angle (Record #7)
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Fois, F.; Hoogeboom, P.; Le Chevalier, F.; Stoffelen, A. DOPSCAT: A mission concept for a Doppler wind-scatterometer. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2572–2575. [Google Scholar] [CrossRef]
- Bao, Q.; Lin, M.; Zhang, Y.; Dong, X.; Lang, S.; Gong, P. Ocean surface current inversion method for a Doppler scatterometer. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6505–6516. [Google Scholar] [CrossRef]
- Miao, Y.; Dong, X.; Bao, Q.; Zhu, D. Perspective of a Ku-Ka dual-frequency scatterometer for simultaneous wide-swath ocean surface wind and current measurement. Remote Sens. 2018, 10, 1042. [Google Scholar] [CrossRef] [Green Version]
- Gommenginger, C.; Chapron, B.; Martin, A.; Marquez, J.; Brownsword, C.; Buck, C. SEASTAR: A new mission for high-resolution imaging of ocean surface current and wind vectors from space. In Proceedings of the EUSAR 2018, 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1433–1436. [Google Scholar]
- Ardhuin, F.; Brandt, P.; Gaultier, L.; Donlon, C.; Battaglia, A.; Boy, F.; Casal, T.; Chapron, B.; Collard, F.; Cravatte, S.; et al. SKIM, a candidate satellite mission exploring global ocean currents and waves. Front. Mar. Sci. 2019, 6, 209. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez, E.; Bourassa, M.; Chelton, D.; Farrar, J.T.; Long, D.; Perkovic-Martin, D.; Samelson, R. The winds and currents mission concept. Front. Mar. Sci. 2019, 6, 438. [Google Scholar] [CrossRef]
- Rodriguez, E. On the optimal design of doppler scatterometers. Remote Sens. 2018, 10, 1765. [Google Scholar] [CrossRef] [Green Version]
- Masuko, H.; Okamoto, K.; Shimada, M.; Niwa, S. Measurement of microwave backscattering signatures of the ocean surface using X-band and Ka-band airborne scatterometers. J. Geophys. Res. (Oceans) 1986, 91, 13065–13084. [Google Scholar] [CrossRef]
- Plant, W.J.; Terray, E.A.; Petitt, R.A.; Keller, W.C. The dependence of microwave backscatter from the sea on illuminated area: Correlation times and lengths. J. Geophys. Res. (Oceans) 1994, 99, 9705–9723. [Google Scholar] [CrossRef]
- Vandemark, D.; Chapron, B.; Sun, J.; Crescenti, G.H.; Graber, H.C. Ocean wave slope observations using radar backscatter and laser altimeters. J. Phys. Oceanogr. 2004, 34, 2825–2842. [Google Scholar] [CrossRef]
- Nekrasov, A.; Hoogeboom, P. A Ka-band backscatter model function and an algorithm for measurement of the wind vector over the sea surface. IEEE Geosci. Remote Sens. Lett. 2005, 2, 23–27. [Google Scholar] [CrossRef]
- Walsh, E.J.; Wright, C.W.; Banner, M.L.; Vandemark, D.C.; Chapron, B.; Jensen, J.; Lee, S. The southern ocean waves experiment. Part III: Sea surface slope statistics and near-nadir remote sensing. J. Phys. Oceanogr. 2008, 38, 670–685. [Google Scholar] [CrossRef]
- Ermakov, S.A.; Kapustin, I.A.; Kudryavtsev, V.N.; Sergievskaya, I.A.; Shomina, O.V.; Chapron, B.; Yurovskiy, Y.Y. On the Doppler frequency shifts of radar signals backscattered from the sea surface. Radiophys. Quantum Electron. 2014, 57, 239–250. [Google Scholar] [CrossRef]
- Boisot, O.; Pioch, S.; Fatras, C.; Caulliez, G.; Bringer, A.; Borderies, P.; Lalaurie, J.C.; Guérin, C.A. Ka-band backscattering from water surface at small incidence: A wind-wave tank study. J. Geophys. Res. (Oceans) 2015, 120, 3261–3285. [Google Scholar] [CrossRef]
- Nouguier, F.; Mouche, A.; Rascle, N.; Chapron, B.; Vandemark, D. Analysis of dual-frequency ocean backscatter measurements at Ku- and Ka-bands using near-nadir incidence GPM radar data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1310–1314. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, E.; Wineteer, A.; Perkovic-Martin, D.; Gál, T.; Stiles, B.; Niamsuwan, N.; Rodriguez Monje, R. Estimating ocean vector winds and currents using a Ka-Band pencil-beam Doppler scatterometer. Remote Sens. 2018, 10, 576. [Google Scholar] [CrossRef] [Green Version]
- Marié, L.; Collard, F.; Nouguier, F.; Pineau-Guillou, L.; Hauser, D.; Boy, F.; Méric, S.; Peureux, C.; Monnier, G.; Chapron, B.; et al. Measuring ocean surface velocities with the KuROS and KaRADOC airborne near-nadir Doppler radars: A multi-scale analysis in preparation of the SKIM mission. Ocean Sci. Discuss. 2019, 2019, 1–52. [Google Scholar] [CrossRef]
- Ermakov, S.A.; Dobrokhotov, V.A.; Sergievskaya, I.A.; Kapustin, I.A. Suppression of wind ripples and microwave backscattering due to turbulence generated by breaking surface waves. Remote Sens. 2020, 12, 3618. [Google Scholar] [CrossRef]
- Mouche, A.A.; Chapron, B.; Reul, N.; Collard, F. Predicted Doppler shifts induced by ocean surface wave displacements using asymptotic electromagnetic wave scattering theories. Waves Random Media 2008, 18, 185–196. [Google Scholar] [CrossRef]
- Gairola, R.M.; Prakash, S.; Mahesh, C.; Gohil, B.S. Model function for wind speed retrieval from SARAL-AltiKa radar altimeter backscatter: Case studies with TOPEX and JASON data. Mar. Geod. 2014, 37, 379–388. [Google Scholar] [CrossRef]
- Fois, F.; Hoogeboom, P.; Le Chevalier, F.; Stoffelen, A. An analytical model for the description of the full-polarimetric sea surface Doppler signature. J. Geophys. Res. (Oceans) 2015, 120, 988–1015. [Google Scholar] [CrossRef] [Green Version]
- Nouguier, F.; Chapron, B.; Collard, F.; Mouche, A.; Rascle, N.; Ardhuin, F.; Wu, X. Sea surface kinematics from near-nadir radar measurement. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6169–6179. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Ka-band dual copolarized empirical model for the sea surface radar cross section. IEEE Trans. Geosci. Remote Sens. 2016, 55, 1629–1647. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Low-frequency sea surface radar Doppler echo. Remote Sens. 2018, 10, 870. [Google Scholar] [CrossRef] [Green Version]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Chapron, B.; Grodsky, S.A. Modulation of Ka-band Doppler radar signals backscattered from the sea surface. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2931–2948. [Google Scholar] [CrossRef] [Green Version]
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Sea surface Ka-band Doppler measurements: Analysis and model development. Remote Sens. 2019, 11, 839. [Google Scholar] [CrossRef]
- Quilfen, Y.; Chapron, B.; Elfouhaily, T.; Katsaros, K.; Tournadre, J. Observation of tropical cyclones by high-resolution scatterometry. J. Geophys. Res. (Oceans) 1998, 103, 7767–7786. [Google Scholar] [CrossRef]
- Donnelly, W.J.; Carswell, J.R.; McIntosh, R.E.; Chang, P.S.; Wilkerson, J.; Marks, F.; Black, P.G. Revised ocean backscatter models at C and Ku band under high-wind conditions. J. Geophys. Res. (Oceans) 1999, 104, 11485–11498. [Google Scholar] [CrossRef]
- Fernandez, D.E.; Carswell, J.R.; Frasier, S.; Chang, P.S.; Black, P.G.; Marks, F.D. Dual-polarized C- and Ku-band ocean backscatter response to hurricane-force winds. J. Geophys. Res. (Oceans) 2006, 111. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhang, B.; Mouche, A.; He, Y.; Perrie, W. Ku-band sea surface radar backscatter at low incidence angles under extreme wind conditions. Remote Sens. 2017, 9, 474. [Google Scholar] [CrossRef] [Green Version]
- Goldstein, H. Sea echo. In Propagation of Short Radio Waves; Kerr, D.E., Ed.; IET: London, UK, 1947; pp. 481–571. [Google Scholar]
- Sharkov, E.A. Breaking Ocean Waves: Geometry, Structure and Remote Sensing; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Raizer, V. Radar backscattering from sea foam and spray. In Proceedings of the International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2013; pp. 4054–4057. [Google Scholar] [CrossRef]
- Doviak, R.J.; Zrnic, D.S. Meteorological radar signal processing. In Doppler Radar and Weather Observations; Academic Press: San Diego, CA, USA, 1984; pp. 91–120. [Google Scholar]
- Kalmykov, A.I.; Kurekin, A.S.; Lementa, Y.A.; Ostrovskii, I.E.; Pustovoitenko, V.V. Characteristics of SFH scattering at breaking sea waves. Radiophys. Quantum Electron. 1976, 19, 923–928. [Google Scholar] [CrossRef]
- Plant, W.J. Microwave sea return at moderate to high incidence angles. Waves Random Media 2003, 13, 339–354. [Google Scholar] [CrossRef] [Green Version]
- Plant, W.J.; Keller, W.C.; Asher, W.E. Is sea spray a factor in microwave backscatter from the ocean? In Proceedings of the 2006 IEEE MicroRad, San Juan, PR, USA, 28 February–3 March 2006; pp. 115–118. [Google Scholar] [CrossRef]
- Fairall, C.W.; Bradley, E.F.; Hare, J.E.; Grachev, A.A.; Edson, J.B. Bulk parameterization of air sea fluxes: Updates and verification for the COARE algorithm. J. Clim. 2003, 16, 571–591. [Google Scholar] [CrossRef]
- Zapevalov, A.S.; Garmashov, A.V. Skewness and kurtosis of the surface wave in the coastal zone of the Black Sea. Phys. Oceanogr. 2021, 28, 414–425. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Cartwright, D.E.; Smith, N.D. Observations of the directional spectrum of sea waves using the motions of a floating buoy. In Ocean Wave Spectra: Proceedings of a Conference; North Atlantic Oscillation Sciences; Prentice Hall: Hoboken, NJ, USA, 1961; pp. 111–132. [Google Scholar]
- Earle, M.D.; Brown, R.; Baker, D.J.; McCall, J.C. Nondirectional and Directional Wave Data Analysis Procedures. NDBC Technical Document 96-01, Stennis Space Center, 1996. Available online: www.ndbc.noaa.gov/wavemeas.pdf (accessed on 25 January 2022).
- Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Ka-band radar cross-section of breaking wind waves. Remote Sens. 2021, 13, 1929. [Google Scholar] [CrossRef]
- Wentz, F.J.; Smith, D.K. A model function for the ocean-normalized radar cross section at 14 GHz derived from NSCAT observations. J. Geophys. Res. (Oceans) 1999, 104, 11499–11514. [Google Scholar] [CrossRef]
- NSCAT-4 Geophysical Model Function. Royal Netherlands Meteorological Institute (KNMI). Available online: https://scatterometer.knmi.nl/nscat_gmf/ (accessed on 25 January 2022).
- Donelan, M.A.; Haus, B.K.; Reul, N.; Plant, W.J.; Stiassnie, M.; Graber, H.C.; Brown, O.B.; Saltzman, E.S. On the limiting aerodynamic roughness of the ocean in very strong winds. Geophys. Res. Lett. 2004, 31, L18306. [Google Scholar] [CrossRef] [Green Version]
- Kudryavtsev, V.N. On the effect of sea drops on the atmospheric boundary layer. J. Geophys. Res. (Oceans) 2006, 111. [Google Scholar] [CrossRef]
- Kudryavtsev, V.N.; Makin, V.K. Aerodynamic roughness of the sea surface at high winds. Bound.-Layer Meteorol. 2007, 125, 289–303. [Google Scholar] [CrossRef]
- Troitskaya, Y.I.; Sergeev, D.A.; Kandaurov, A.A.; Baidakov, G.A.; Vdovin, M.A.; Kazakov, V.I. Laboratory and theoretical modeling of air-sea momentum transfer under severe wind conditions. J. Geophys. Res. Ocean. 2012, 117. [Google Scholar] [CrossRef]
- Hwang, P.A.; Li, X.; Zhang, B. Coupled nature of hurricane wind and wave properties for ocean remote sensing of hurricane wind speed. In Hurricane Monitoring with Spaceborne Synthetic Aperture Radar; Li, X., Ed.; Series Title: Springer Natural Hazards; Springer: Singapore, 2017; pp. 215–236. [Google Scholar] [CrossRef]
- Kudryavtsev, V.; Hauser, D.; Caudal, G.; Chapron, B. A semiempirical model of the normalized radar cross-section of the sea surface 1. Background model. J. Geophys. Res. (Oceans) 2003, 108, C08054. [Google Scholar] [CrossRef] [Green Version]
- Meissner, T.; Wentz, F.J.; Ricciardulli, L. The emission and scattering of L-band microwave radiation from rough ocean surfaces and wind speed measurements from the Aquarius sensor. J. Geophys. Res. (Oceans) 2014, 119, 6499–6522. [Google Scholar] [CrossRef]
- Mouche, A.; Chapron, B. Global C-band envisat, RADARSAT-2 and Sentinel-1 SAR measurements in copolarization and cross-polarization. J. Geophys. Res. (Oceans) 2015, 120, 7195–7207. [Google Scholar] [CrossRef] [Green Version]
- Stoffelen, A.; Verspeek, J.A.; Vogelzang, J.; Verhoef, A. The CMOD7 geophysical model function for ASCAT and ERS wind retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2123–2134. [Google Scholar] [CrossRef]
- Zhang, B.; Mouche, A.; Lu, Y.; Perrie, W.; Zhang, G.; Wang, H. A geophysical model function for wind speed retrieval from C-band HH-polarized synthetic aperture radar. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1521–1525. [Google Scholar] [CrossRef]
- Quilfen, Y.; Chapron, B.; Bentamy, A.; Gourrion, J.; Elfouhaily, T.; Vandemark, D. Global ERS 1 and 2 and NSCAT observations: Upwind/crosswind and upwind/downwind measurements. J. Geophys. Res. (Oceans) 1999, 104, 11459–11469. [Google Scholar] [CrossRef]
- Valenzuela, G.R. Theories for the interaction of electromagnetic and ocean waves—A review. Bound.-Layer Meteorol. 1978, 13, 61–85. [Google Scholar] [CrossRef]
- Mouche, A.A.; Hauser, D.; Kudryavtsev, V. Radar scattering of the ocean surface and sea-roughness properties: A combined analysis from dual-polarizations airborne radar observations and models in C-band. J. Geophys. Res. (Oceans) 2006, 111, 9004. [Google Scholar] [CrossRef]
- Kudryavtsev, V.N.; Chapron, B.; Myasoedov, A.G.; Collard, F.; Johannessen, J.A. On dual co-polarized SAR measurements of the ocean surface. IEEE Geosci. Remote Sens. Lett. 2013, 10, 761–765. [Google Scholar] [CrossRef]
- Banner, M.L.; Phillips, O.M. On the incipient breaking of small scale waves. J. Fluid Mech. 1974, 65, 647–656. [Google Scholar] [CrossRef]
- Melville, W.K. The role of surface-wave breaking in air-sea interaction. Annu. Rev. Fluid Mech. 1996, 28, 279–321. [Google Scholar] [CrossRef]
- Jessup, A.T.; Zappa, C.J.; Yeh, H. Defining and quantifying microscale wave breaking with infrared imagery. J. Geophys. Res. Ocean. 1997, 102, 23145–23153. [Google Scholar] [CrossRef] [Green Version]
- Bass, F.; Fuks, I.; Kalmykov, A.; Ostrovsky, I.; Rosenberg, A. Very high frequency radiowave scattering by a disturbed sea surface Part I: Scattering from a slightly disturbed boundary. IEEE Trans. Antennas Propag. 1968, 16, 554–559. [Google Scholar] [CrossRef]
- Bass, F.; Fuks, I.; Kalmykov, A.; Ostrovsky, I.; Rosenberg, A. Very high frequency radiowave scattering by a disturbed sea surface Part II: Scattering from an actual sea surface. IEEE Trans. Antennas Propag. 1968, 16, 560–568. [Google Scholar] [CrossRef]
- Wright, J. A new model for sea clutter. IEEE Trans. Antennas Propag. 1968, 16, 217–223. [Google Scholar] [CrossRef]
- Klein, L.; Swift, C. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE J. Ocean. Eng. 1977, 2, 104–111. [Google Scholar] [CrossRef]
- Phillips, O.M. Spectral and statistical properties of the equilibrium range in wind-generated gravity waves. J. Fluid Mech. 1985, 156, 505–531. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Measurement of the roughness of the sea surface from photographs of the sun’s glitter. J. Opt. Soc. Am. 1954, 44, 838. [Google Scholar] [CrossRef]
- Romeiser, R.; Thompson, D.R. Numerical study on the along-track interferometric radar imaging mechanism of oceanic surface currents. IEEE Trans. Geosci. Remote Sens. 2000, 38, 446–458. [Google Scholar] [CrossRef] [Green Version]
- Chapron, B.; Collard, F.; Ardhuin, F. Direct measurements of ocean surface velocity from space: Interpretation and validation. J. Geophys. Res. (Oceans) 2005, 110, C07008. [Google Scholar] [CrossRef]
- Romeiser, R.; Runge, H.; Suchandt, S.; Kahle, R.; Rossi, C.; Bell, P.S. Quality assessment of surface current fields from TerraSAR-X and TanDEM-X along-track interferometry and Doppler centroid analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2759–2772. [Google Scholar] [CrossRef] [Green Version]
- Martin, A.C.H.; Gommenginger, C.; Marquez, J.; Doody, S.; Navarro, V.; Buck, C. Wind-wave-induced velocity in ATI SAR ocean surface currents: First experimental evidence from an airborne campaign. J. Geophys. Res. (Oceans) 2016, 121, 1640–1653. [Google Scholar] [CrossRef] [Green Version]
- Elyouncha, A.; Eriksson, L.E.B.; Romeiser, R.; Ulander, L.M.H. Measurements of sea surface currents in the Baltic Sea region using spaceborne along-track InSAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8584–8599. [Google Scholar] [CrossRef]
- Moiseev, A.; Johnsen, H.; Hansen, M.W.; Johannessen, J.A. Evaluation of radial ocean surface currents derived from Sentinel-1 IW Doppler shift using coastal radar and Lagrangian surface drifter observations. J. Geophys. Res. Ocean. 2020, 125. [Google Scholar] [CrossRef]
- Elyouncha, A.; Eriksson, L.E.B.; Romeiser, R.; Ulander, L.M.H. Empirical relationship between the Doppler centroid derived from X-Band spaceborne InSAR data and wind vectors. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–20. [Google Scholar] [CrossRef]
- Miao, Y.; Dong, X.; Bourassa, M.A.; Zhu, D. Effects of ocean wave directional spectra on Doppler retrievals of ocean surface current. IEEE Trans. Geosci. Remote Sens. 2021. [Google Scholar] [CrossRef]
- Martin, A.C.; Gommenginger, C.P.; Jacob, B.; Staneva, J. First multi-year assessment of Sentinel-1 radial velocity products using HF radar currents in a coastal environment. Remote Sens. Environ. 2022, 268, 112758. [Google Scholar] [CrossRef]
- Plant, W.J. A two-scale model of short wind-generated waves and scatterometry. J. Geophys. Res. (Oceans) 1986, 91, 10735–10749. [Google Scholar] [CrossRef]
- Kudryavtsev, V.; Hauser, D.; Caudal, G.; Chapron, B. A semiempirical model of the normalized radar cross section of the sea surface, 2. Radar modulation transfer function. J. Geophys. Res. (Oceans) 2003, 108, C08055. [Google Scholar] [CrossRef]
- Keller, W.C.; Plant, W.J.; Valenzuela, G.R. Observation of breaking ocean waves with coherent microwave radar. In Wave Dynamics and Radio Probing of the Ocean Surface; Phillips, O.M., Hasselmann, K., Eds.; Springer: Boston, MA, USA, 1986; pp. 285–293. [Google Scholar] [CrossRef]
- Moiseev, A.; Johnsen, H.; Johannessen, J.A.; Collard, F.; Guitton, G. On removal of sea state contribution to Sentinel-1 Doppler shift for retrieving reliable ocean surface current. J. Geophys. Res. Ocean. 2020, 125. [Google Scholar] [CrossRef]
- Yurovsky, Y.; Sergievskaya, I.; Ermakov, S.; Chapron, B.; Kapustin, I.; Shomina, O. Influence of wind wave breakings on a millimeter-wave radar backscattering by the sea surface. Phys. Oceanogr. 2015, 4, 34–45. [Google Scholar] [CrossRef]
- Donelan, M.A.; Hamilton, J.; Hui, W.H. Directional spectra of wind-generated ocean waves. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 1985, 315, 509–562. [Google Scholar] [CrossRef]
- Ito, S.; Oguchi, T.; Iguchi, T.; Kumagai, H.; Meneghini, R. Depolarization of radar signals due to multiple scattering in rain. IEEE Trans. Geosci. Remote Sens. 1995, 33, 1057–1062. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yurovsky, Y.Y.; Kudryavtsev, V.N.; Grodsky, S.A.; Chapron, B. Ka-Band Doppler Scatterometry: A Strong Wind Case Study. Remote Sens. 2022, 14, 1348. https://doi.org/10.3390/rs14061348
Yurovsky YY, Kudryavtsev VN, Grodsky SA, Chapron B. Ka-Band Doppler Scatterometry: A Strong Wind Case Study. Remote Sensing. 2022; 14(6):1348. https://doi.org/10.3390/rs14061348
Chicago/Turabian StyleYurovsky, Yury Yu., Vladimir N. Kudryavtsev, Semyon A. Grodsky, and Bertrand Chapron. 2022. "Ka-Band Doppler Scatterometry: A Strong Wind Case Study" Remote Sensing 14, no. 6: 1348. https://doi.org/10.3390/rs14061348