
Multiple UAV Flights across the Growing Season Can Characterize Fine Scale Phenological Heterogeneity within and among Vegetation Functional Groups


Abstract
:1. Introduction
2. Materials and Methods
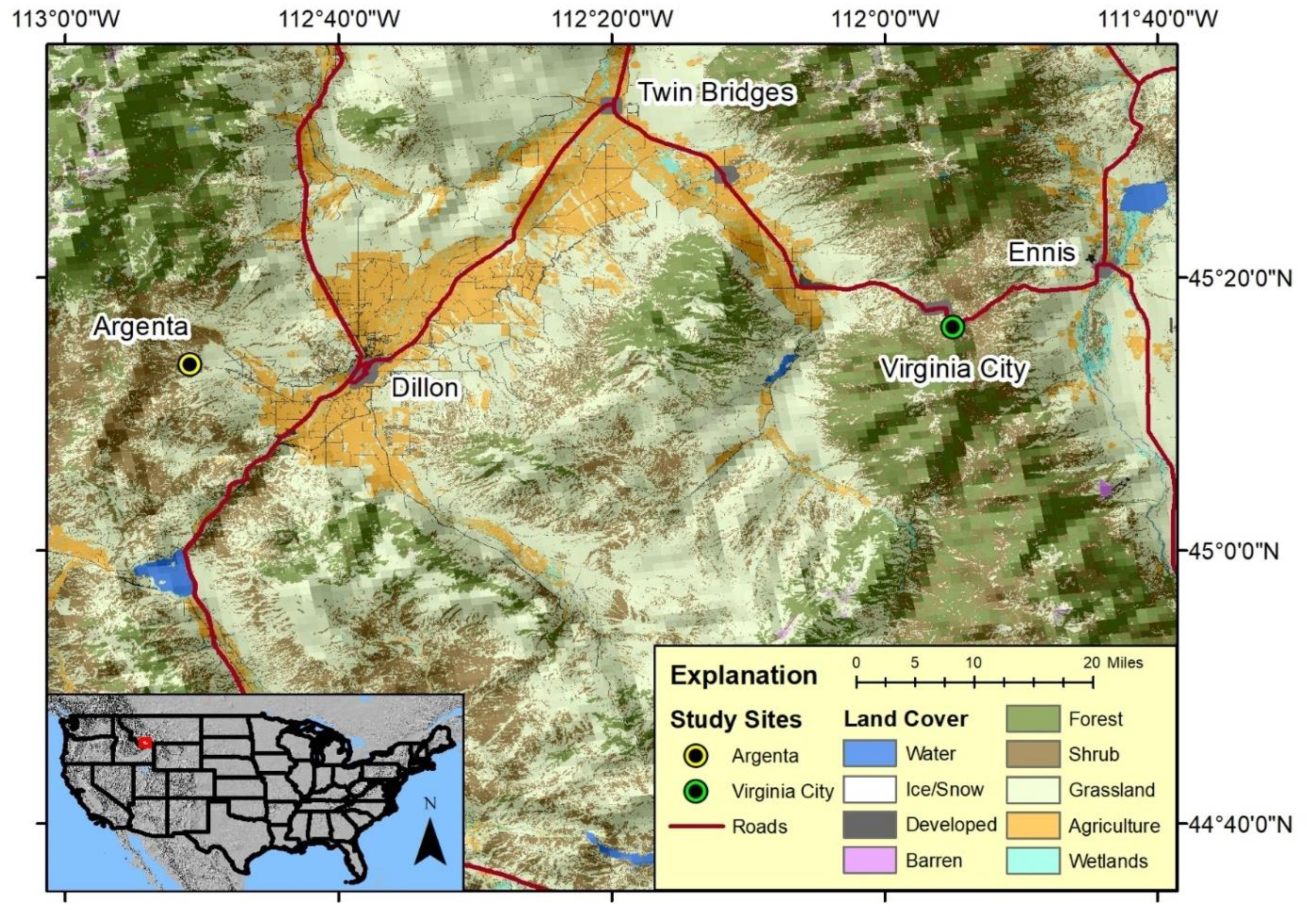
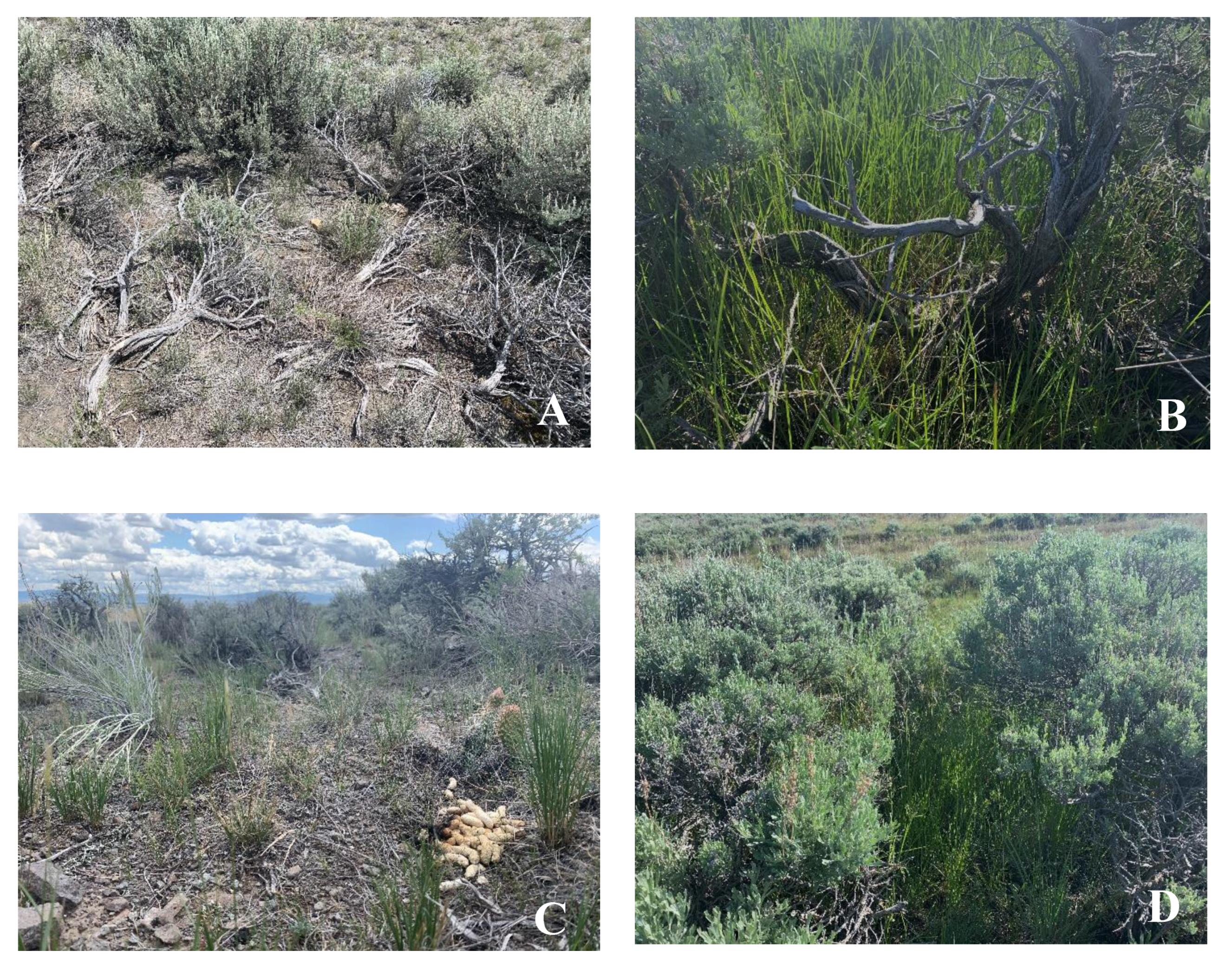
2.1. Study Areas
2.2. Data Collection and Processing
2.3. Image Classification
2.4. Accuracy Assessment
3. Results
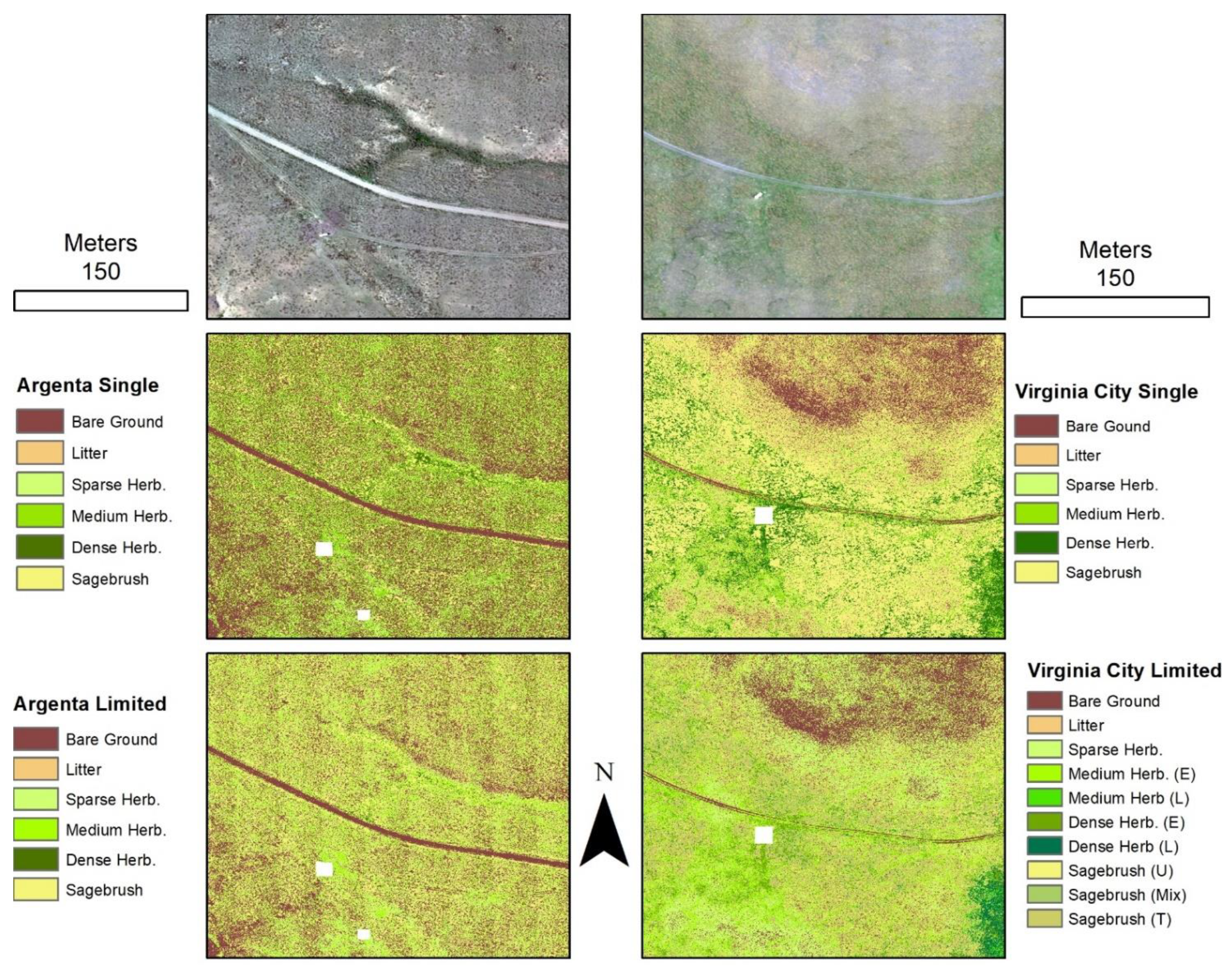
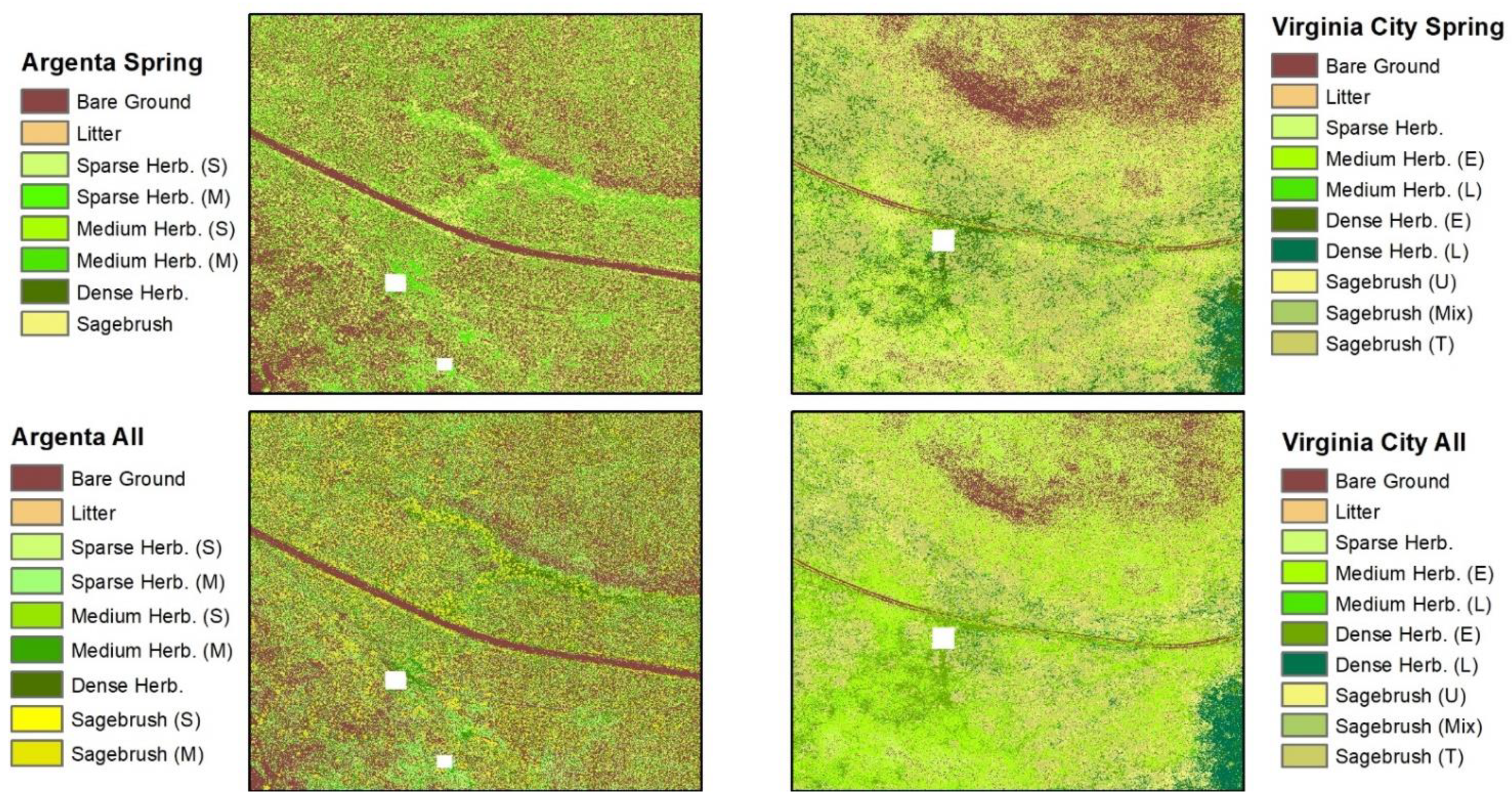
3.1. Flight Classifications
3.2. Accuracy, Class Differentiations, and Comparisons between Scenarios
4. Discussion
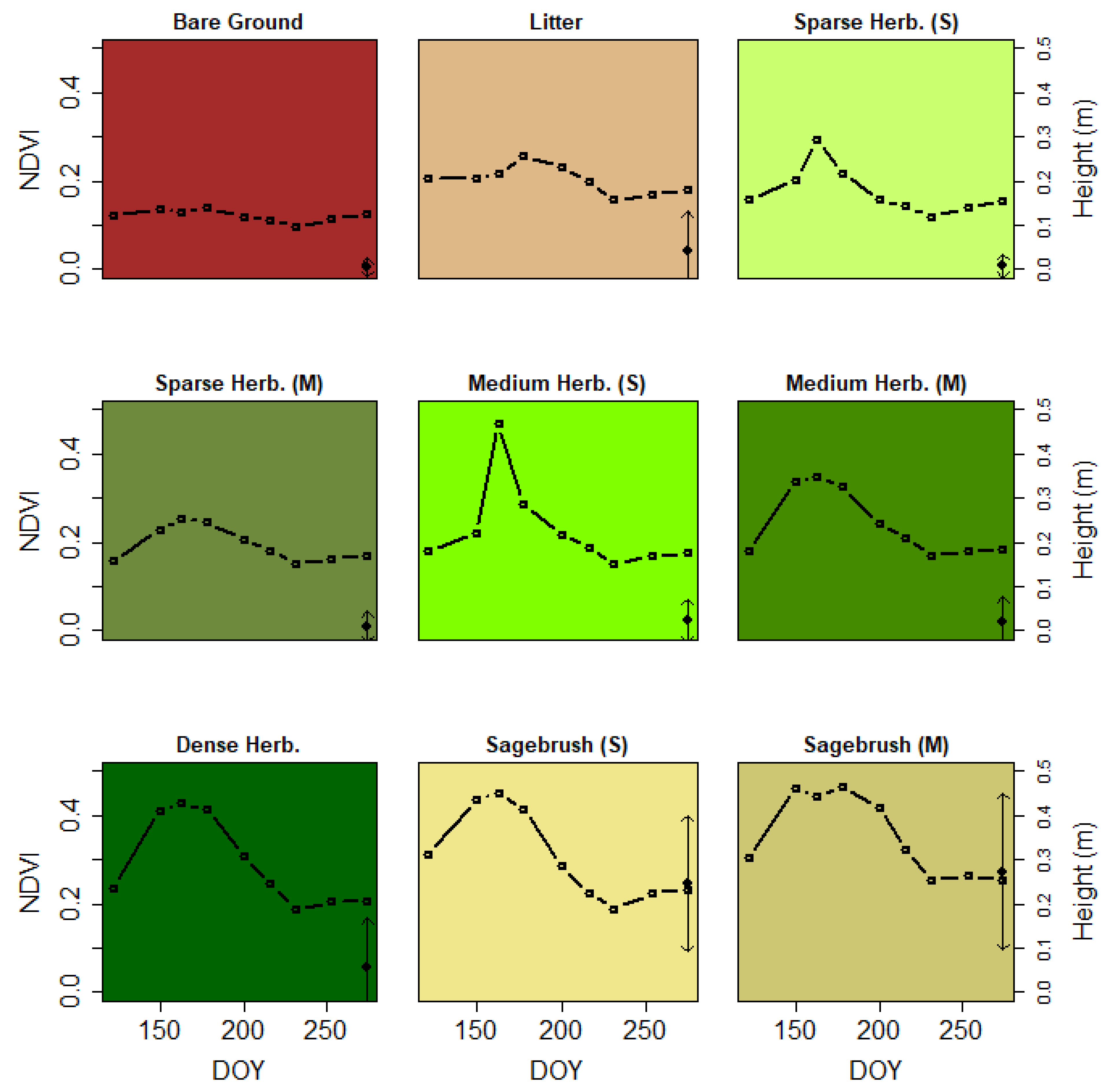
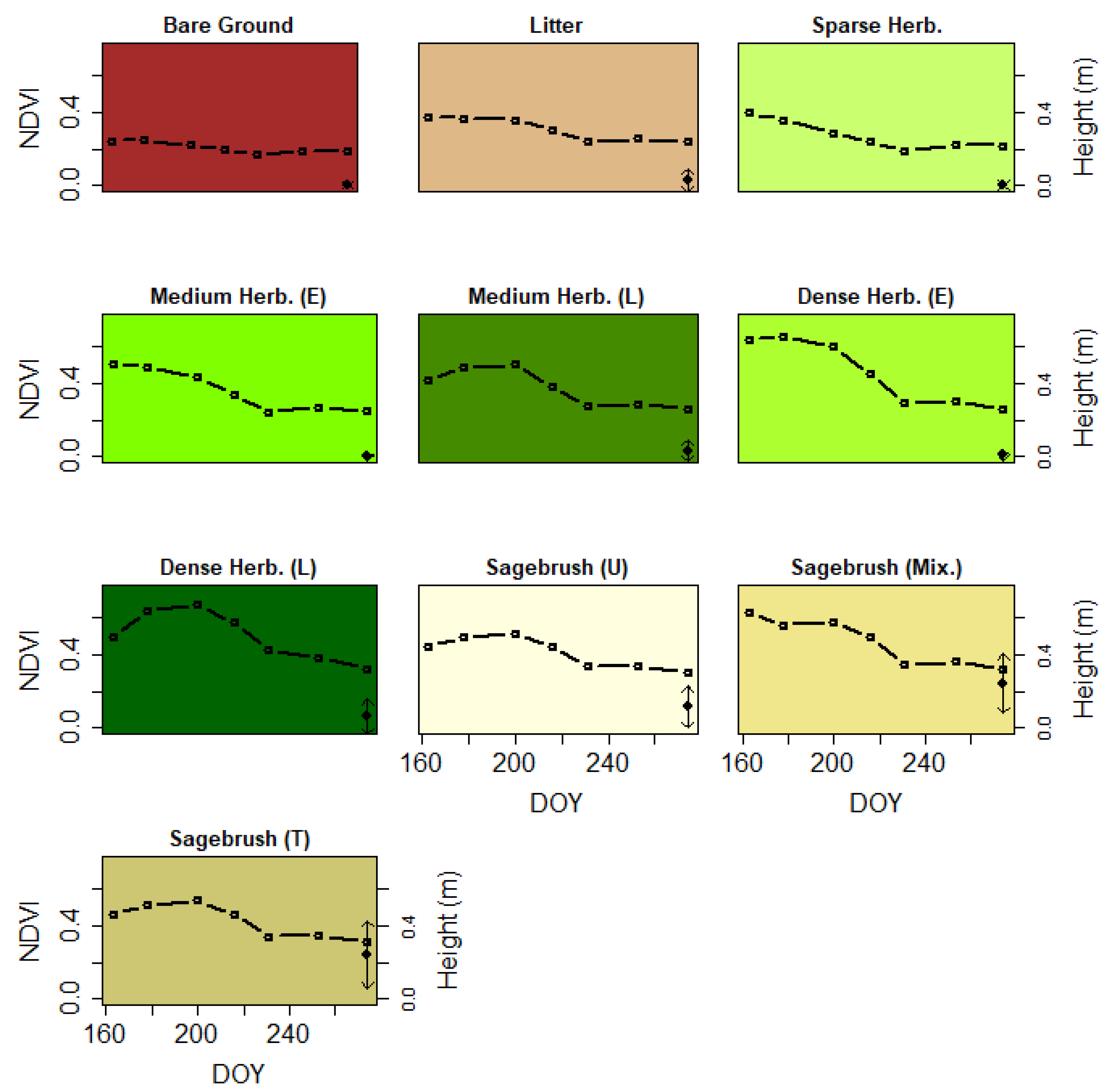
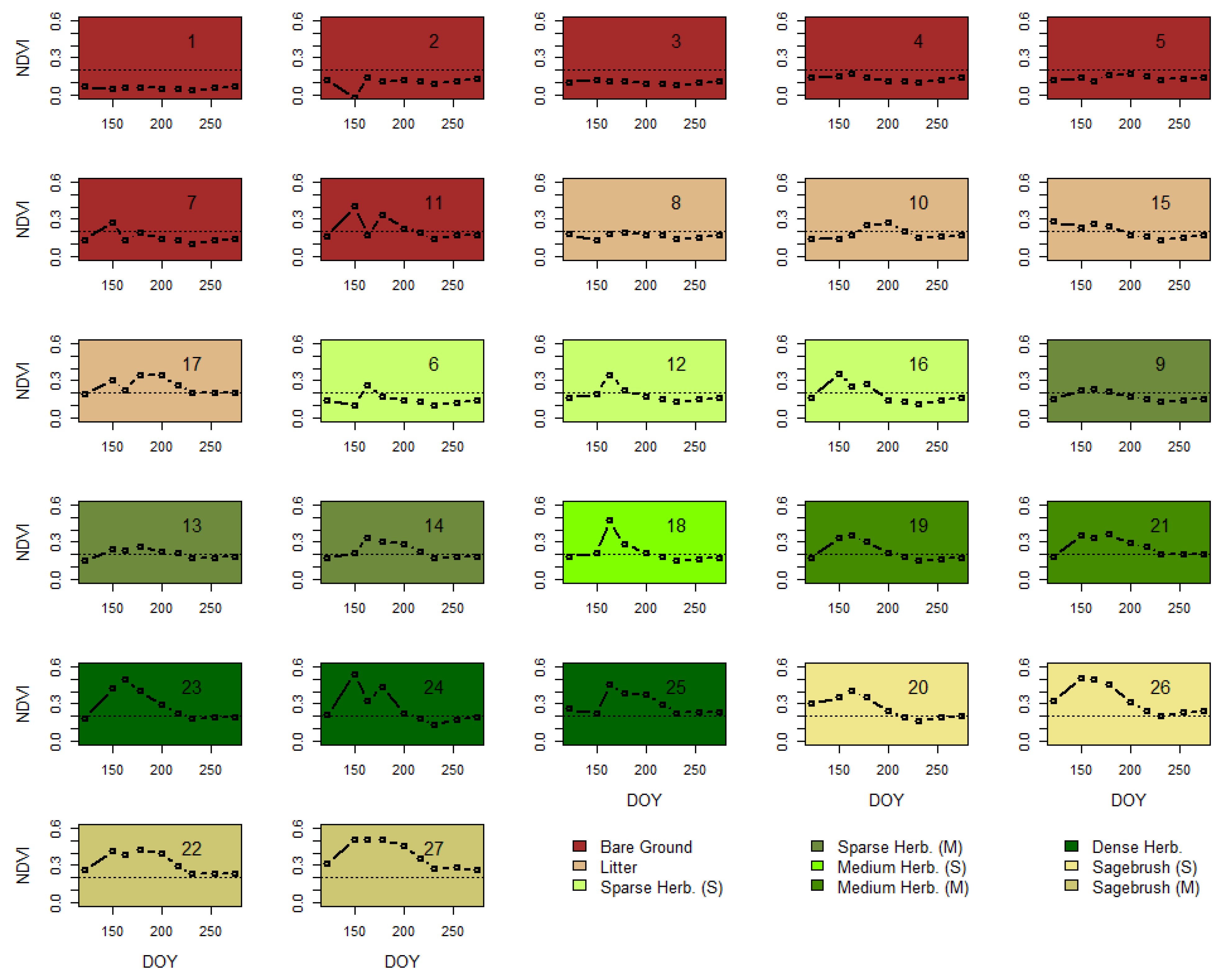
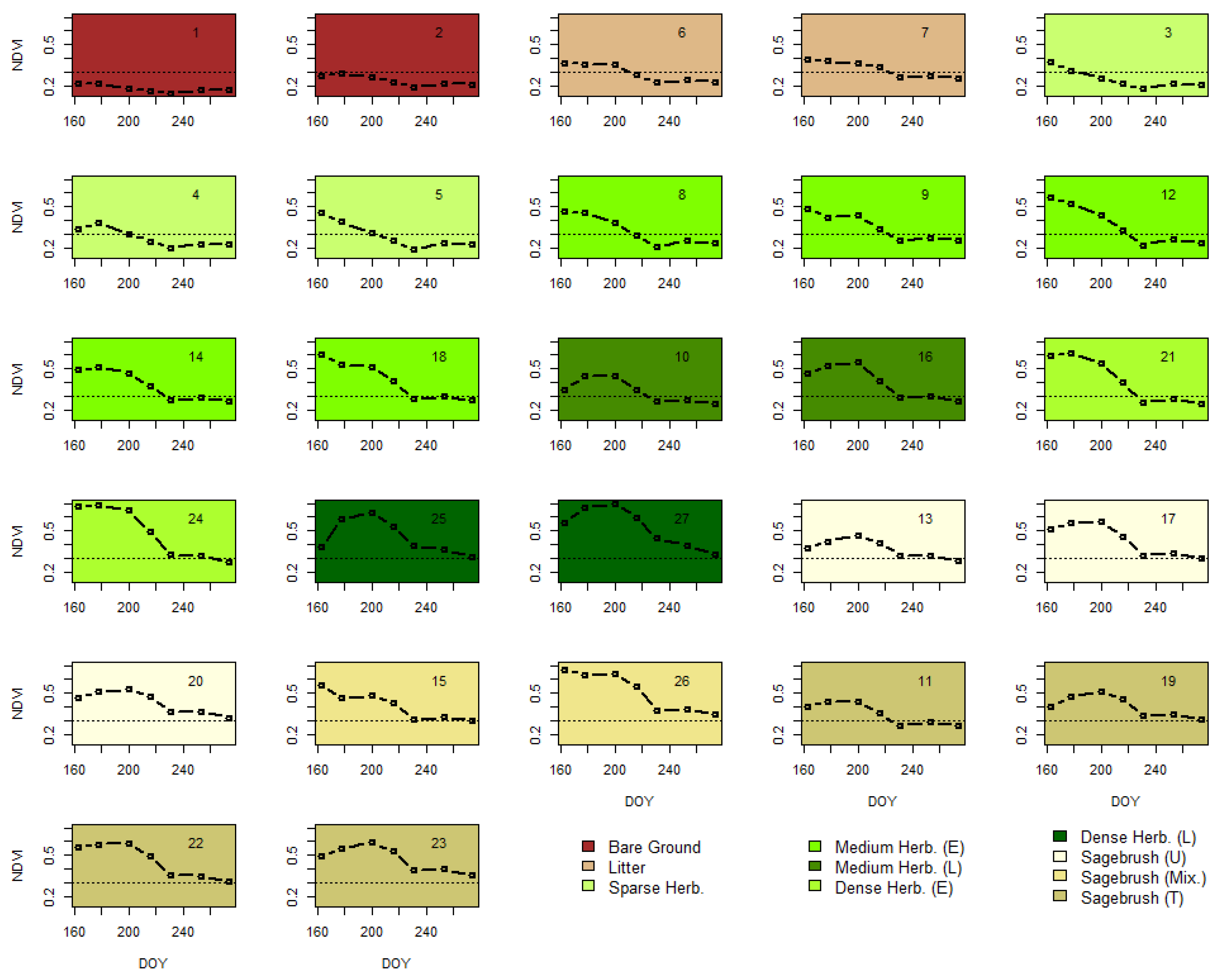
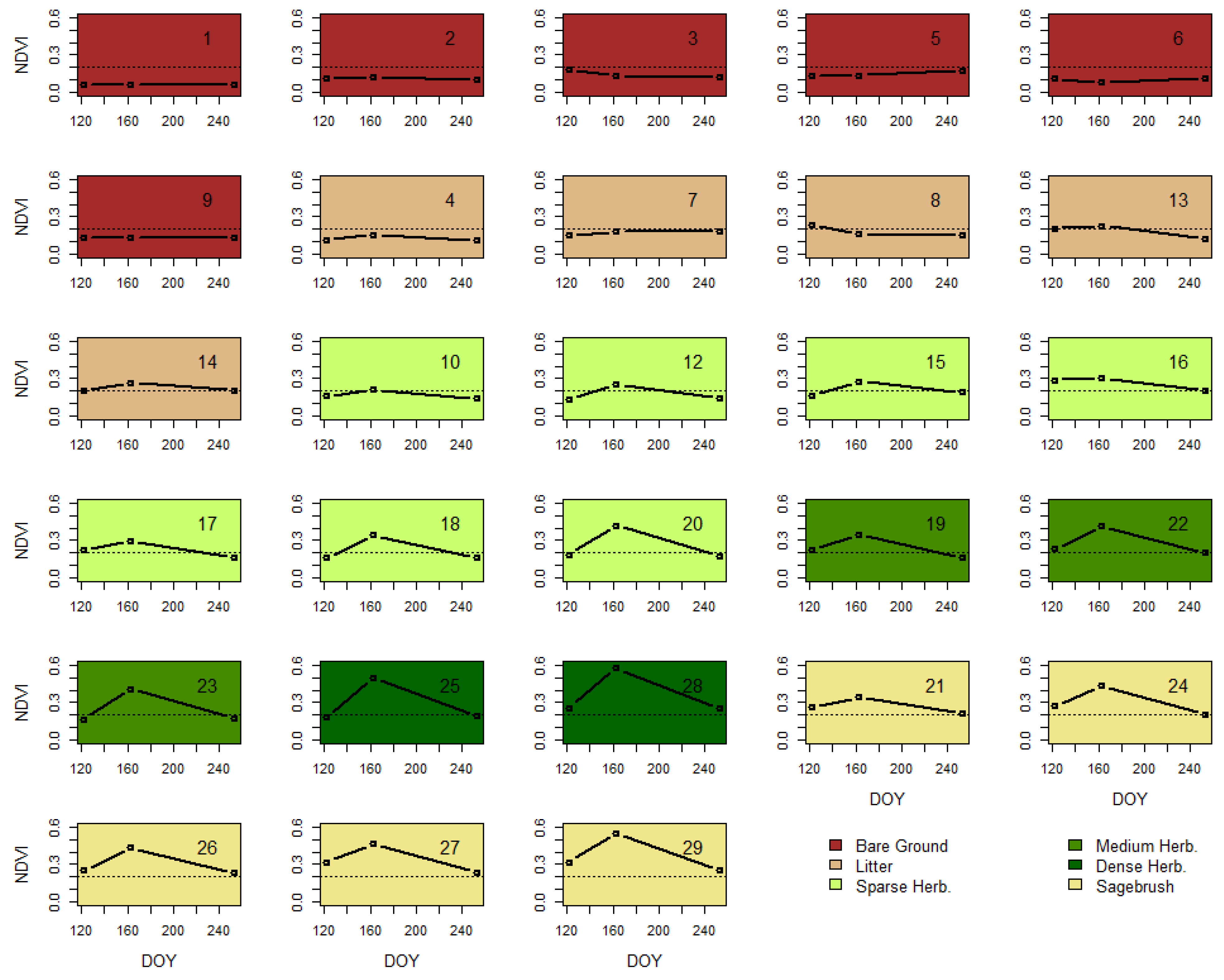
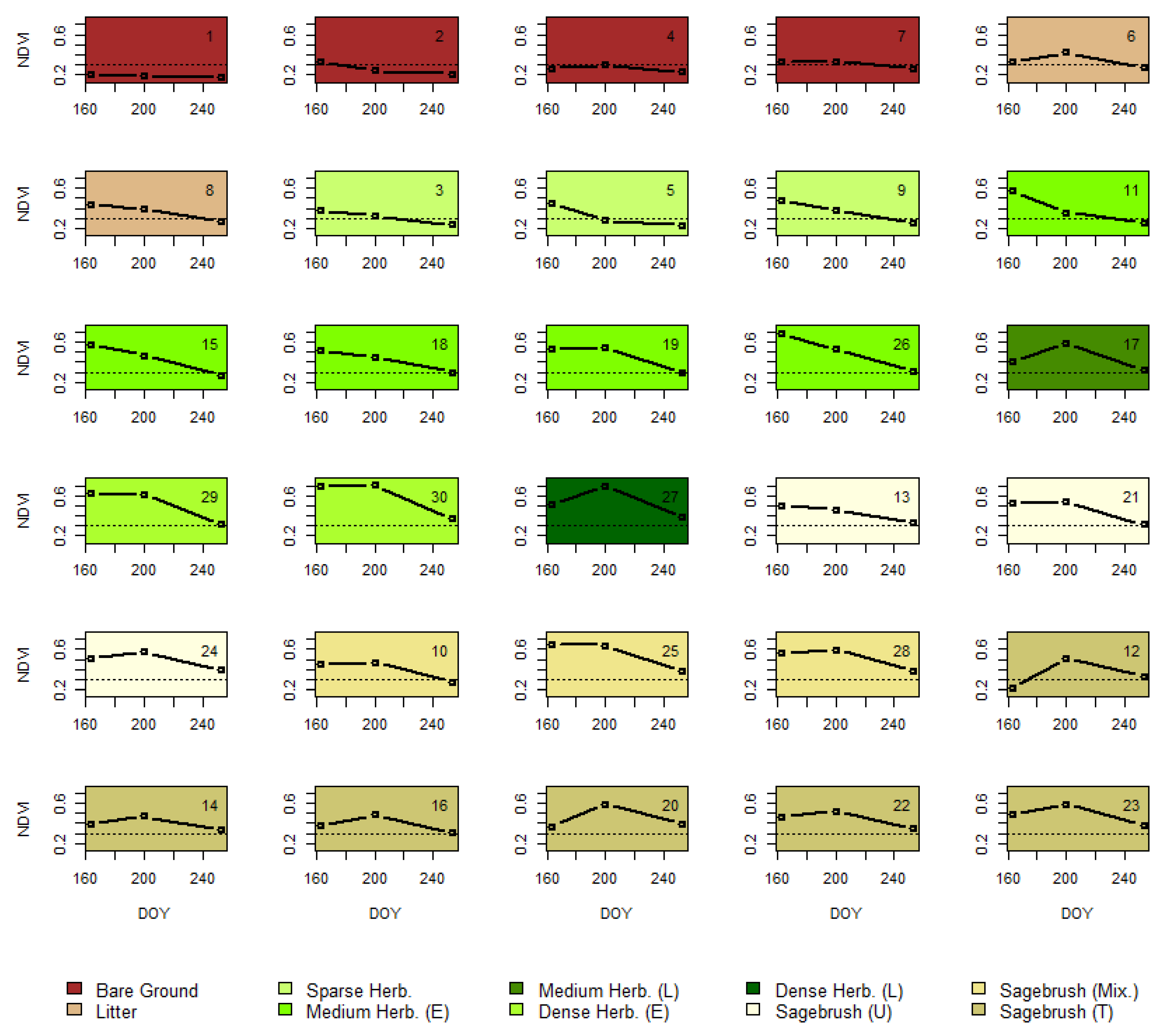
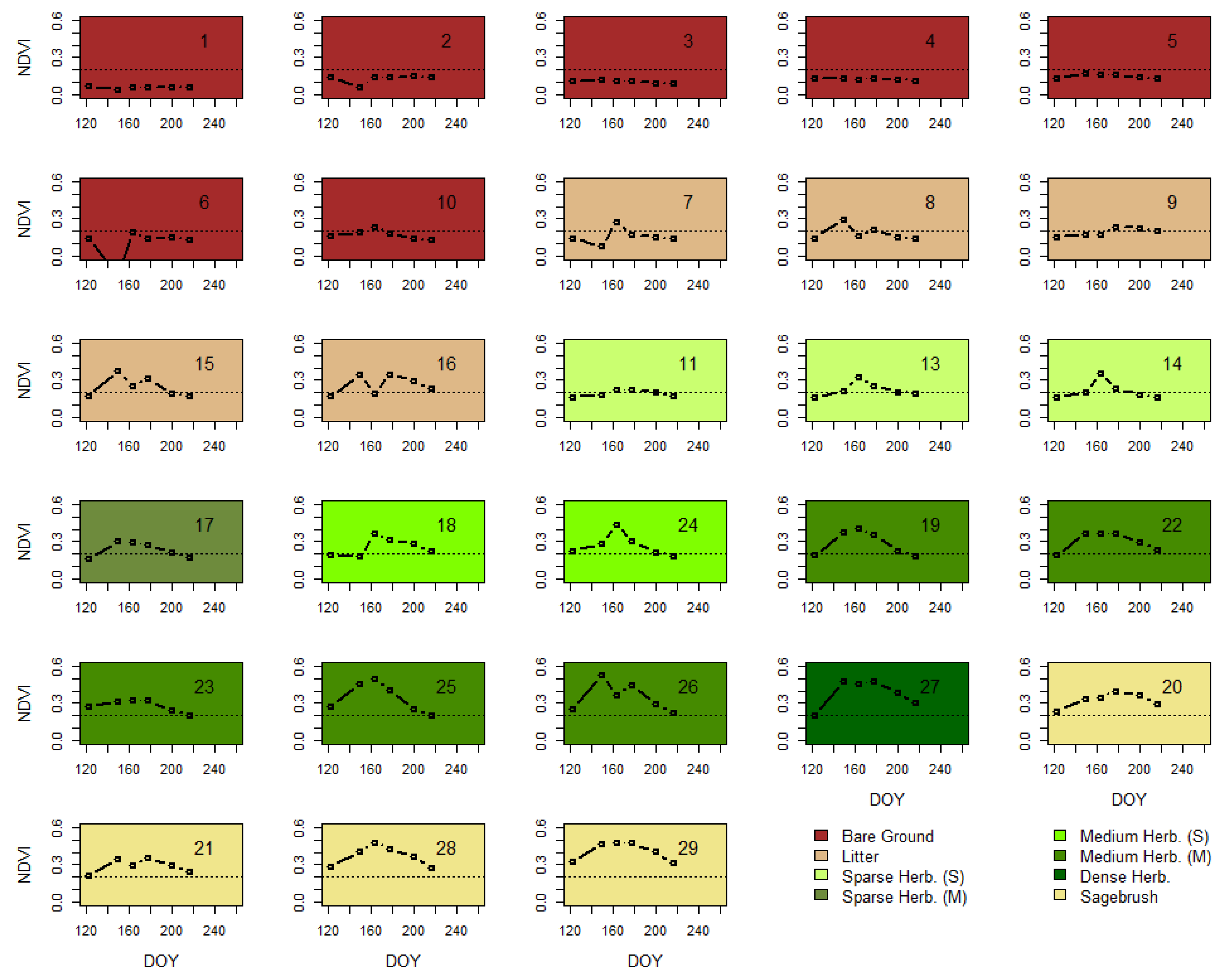
4.1. Phenological Heterogeneity within Functional Groups
4.2. Accuracy and Tradeoffs of Single versus Multi-Flight Approaches
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 105 | 39 | 10 | 5 | 1 | 2 | 162 | 64.8% |
| Litter | 3 | 14 | 3 | 0 | 0 | 7 | 27 | 51.9% | |
| Sparse Herb | 29 | 51 | 92 | 14 | 4 | 12 | 202 | 45.5% | |
| Medium Herb | 1 | 2 | 52 | 100 | 20 | 50 | 225 | 44.4% | |
| Dense Herb | 0 | 2 | 10 | 62 | 18 | 76 | 168 | 10.7% | |
| Sagebrush | 0 | 1 | 9 | 26 | 3 | 176 | 215 | 81.9% | |
| Total | 138 | 109 | 176 | 207 | 46 | 323 | 999 | ||
| Producers Accuracy | 76.1% | 12.8% | 52.3% | 48.3% | 39.1% | 54.5% | 50.6% | ||
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 71 | 21 | 7 | 3 | 0 | 1 | 103 | 68.9% |
| Litter | 29 | 37 | 30 | 12 | 2 | 8 | 118 | 31.4% | |
| Sparse Herb | 36 | 46 | 97 | 44 | 8 | 45 | 276 | 35.1% | |
| Medium Herb | 1 | 1 | 32 | 99 | 24 | 43 | 200 | 49.5% | |
| Dense Herb | 0 | 1 | 1 | 24 | 8 | 19 | 53 | 15.1% | |
| Sagebrush | 1 | 3 | 9 | 25 | 4 | 207 | 249 | 83.3% | |
| Total | 138 | 109 | 176 | 207 | 46 | 323 | 999 | ||
| Producers Accuracy | 51.5% | 33.9% | 55.1% | 47.8% | 17.4% | 64.1% | 51.9% | ||
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 106 | 28 | 33 | 6 | 1 | 2 | 176 | 60.2% |
| Litter | 19 | 38 | 25 | 13 | 0 | 6 | 101 | 37.6% | |
| Sparse Herb | 10 | 33 | 90 | 65 | 2 | 9 | 209 | 43.1% | |
| Medium Herb | 2 | 8 | 25 | 113 | 27 | 132 | 307 | 36.8% | |
| Dense Herb | 0 | 0 | 0 | 0 | 6 | 6 | 12 | 50.0% | |
| Sagebrush | 1 | 2 | 3 | 10 | 10 | 168 | 194 | 86.6% | |
| Total | 138 | 109 | 176 | 207 | 46 | 323 | 999 | ||
| Producers Accuracy | 76.8% | 34.9% | 51.1% | 54.6% | 13.0% | 52.0% | 52.2% | ||
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 83 | 15 | 8 | 3 | 0 | 2 | 111 | 74.8% |
| Litter | 24 | 41 | 21 | 10 | 1 | 14 | 111 | 36.9% | |
| Sparse Herb | 29 | 47 | 110 | 28 | 1 | 7 | 222 | 49.6% | |
| Medium Herb | 0 | 4 | 34 | 135 | 11 | 38 | 222 | 60.8% | |
| Dense Herb | 1 | 1 | 2 | 29 | 30 | 48 | 111 | 27.0% | |
| Sagebrush | 1 | 1 | 1 | 2 | 3 | 214 | 222 | 96.4% | |
| Total | 138 | 109 | 176 | 207 | 46 | 323 | 999 | ||
| Producers Accuracy | 60.1% | 37.6% | 62.5% | 65.2% | 65.2% | 66.3% | 61.4% | ||
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 66 | 22 | 37 | 2 | 0 | 0 | 127 | 51.9% |
| Litter | 21 | 45 | 51 | 25 | 0 | 24 | 166 | 27.1% | |
| Sparse Herb | 0 | 2 | 14 | 25 | 5 | 15 | 61 | 22.9% | |
| Medium Herb | 0 | 0 | 0 | 43 | 36 | 6 | 85 | 50.6% | |
| Dense Herb | 1 | 0 | 0 | 3 | 141 | 38 | 183 | 77.1% | |
| Sagebrush | 2 | 16 | 6 | 52 | 21 | 281 | 378 | 74.3% | |
| Total | 90 | 85 | 108 | 150 | 203 | 364 | 1000 | ||
| Producers Accuracy | 73.3% | 52.9% | 12.9% | 28.7% | 69.5% | 77.2% | 59.0% | ||
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 78 | 45 | 25 | 2 | 0 | 7 | 157 | 49.7% |
| Litter | 4 | 9 | 7 | 11 | 0 | 26 | 57 | 15.8% | |
| Sparse Herb | 5 | 19 | 74 | 26 | 0 | 9 | 133 | 55.6% | |
| Medium Herb | 0 | 3 | 1 | 65 | 58 | 37 | 164 | 39.6% | |
| Dense Herb | 0 | 0 | 0 | 2 | 104 | 13 | 119 | 87.4% | |
| Sagebrush | 3 | 9 | 1 | 44 | 41 | 272 | 370 | 73.5% | |
| Total | 90 | 85 | 108 | 150 | 203 | 364 | 1000 | ||
| Producers Accuracy | 86.7% | 10.6% | 68.5% | 43.3% | 51.2% | 74.7% | 60.2% | ||
| Ground Truth | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 78 | 34 | 33 | 2 | 0 | 2 | 149 | 52.4% |
| Litter | 7 | 25 | 23 | 8 | 0 | 19 | 82 | 30.5% | |
| Sparse Herb | 1 | 9 | 45 | 21 | 0 | 11 | 87 | 51.7% | |
| Medium Herb | 0 | 2 | 0 | 54 | 26 | 43 | 125 | 43.2% | |
| Dense Herb | 0 | 0 | 0 | 7 | 139 | 14 | 160 | 86.9% | |
| Sagebrush | 4 | 15 | 7 | 58 | 38 | 275 | 397 | 69.3% | |
| Total | 90 | 85 | 108 | 150 | 203 | 364 | 1000 | ||
| Producers Accuracy | 86.7% | 29.4% | 41.7% | 36.0% | 68.5% | 75.6% | 61.6% | ||
| Reference | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Class Names | Bare Ground | Litter | Sparse Herb | Medium Herb | Dense Herb | Sagebrush | Total | User’s Accuracy | |
| Classification | Bare Ground | 73 | 19 | 6 | 1 | 0 | 1 | 100 | 73.0% |
| Litter | 7 | 38 | 33 | 6 | 0 | 16 | 100 | 38.0% | |
| Sparse Herb | 6 | 16 | 57 | 18 | 0 | 3 | 100 | 57.0% | |
| Medium Herb | 2 | 5 | 12 | 93 | 17 | 71 | 200 | 46.5% | |
| Dense Herb | 0 | 0 | 0 | 16 | 147 | 37 | 200 | 73.5% | |
| Sagebrush | 2 | 7 | 0 | 16 | 39 | 236 | 300 | 78.7% | |
| Total | 90 | 85 | 108 | 150 | 203 | 364 | 1000 | ||
| Producers Accuracy | 81.1% | 44.7% | 52.8% | 62.0% | 72.4% | 64.8% | 64.40% | ||
| Reference | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Class Value | Bare Ground | Litter | Sparse Herb (S) | Sparse Herb (M) | Medium Herb (S) | Medium Herb (M) | Dense Herb | Sagebrush (S) | Sagebrush (M) | Total | User’s Accuracy | |
| Classification | Bare Ground | 83 | 15 | 3 | 5 | 0 | 3 | 0 | 2 | 0 | 111 | 74.8% |
| Litter | 24 | 41 | 8 | 13 | 2 | 8 | 1 | 7 | 7 | 111 | 36.9% | |
| Sparse Herb (S) | 11 | 15 | 50 | 14 | 12 | 6 | 0 | 3 | 0 | 111 | 45.0% | |
| Sparse Herb (M) | 18 | 32 | 18 | 28 | 3 | 7 | 1 | 1 | 3 | 111 | 25.2% | |
| Medium Herb (S) | 0 | 2 | 7 | 3 | 72 | 7 | 4 | 13 | 3 | 111 | 64.9% | |
| Medium Herb (M) | 0 | 2 | 7 | 17 | 9 | 47 | 7 | 9 | 13 | 111 | 42.3% | |
| Dense Herb | 1 | 1 | 1 | 1 | 11 | 18 | 30 | 26 | 22 | 111 | 27.0% | |
| Sagebrush (S) | 0 | 1 | 0 | 0 | 1 | 1 | 2 | 85 | 21 | 111 | 76.6% | |
| Sagebrush (M) | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 27 | 81 | 111 | 73.0% | |
| Total | 138 | 109 | 94 | 82 | 110 | 97 | 46 | 173 | 150 | 999 | ||
| Producers Accuracy | 60.1% | 37.6% | 53.2% | 34.1% | 65.5% | 48.5% | 65.2% | 49.1% | 54.0% | 51.8% | ||
| Reference | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Class Value | Bare Ground | Litter | Sparse Herb (E) | Medium Herb (S) | Medium Herb (L) | Dense Herb (S) | Dense Herb (L) | Sagebrush (U) | Sagebrush (Mix) | Sagebrush (T) | Total | User’s Accuracy (%) | |
| Classification | Bare Ground | 73 | 19 | 6 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 100 | 73.0 |
| Litter | 7 | 38 | 33 | 4 | 2 | 0 | 0 | 12 | 3 | 1 | 100 | 38.0 | |
| Sparse Herb | 6 | 16 | 57 | 16 | 2 | 0 | 0 | 1 | 2 | 0 | 100 | 57.0 | |
| Medium Herb (E) | 1 | 1 | 9 | 43 | 11 | 8 | 1 | 13 | 10 | 3 | 100 | 43.0 | |
| Medium Herb (L) | 1 | 4 | 3 | 6 | 33 | 3 | 5 | 34 | 0 | 11 | 100 | 33.0 | |
| Dense Herb (E) | 0 | 0 | 0 | 7 | 0 | 75 | 16 | 1 | 0 | 1 | 100 | 75.0 | |
| Dense Herb (L) | 0 | 0 | 0 | 0 | 9 | 4 | 52 | 9 | 2 | 24 | 100 | 52.0 | |
| Sagebrush (U) | 0 | 1 | 0 | 1 | 10 | 4 | 2 | 42 | 4 | 36 | 100 | 42.0 | |
| Sagebrush (Mix) | 0 | 1 | 0 | 0 | 1 | 11 | 8 | 3 | 57 | 19 | 100 | 57.0 | |
| Sagebrush (T) | 2 | 5 | 0 | 0 | 4 | 5 | 9 | 9 | 4 | 62 | 100 | 62.0 | |
| Total | 90 | 85 | 108 | 77 | 73 | 110 | 93 | 125 | 82 | 157 | 1000 | ||
| Producers Accuracy (%) | 81.1 | 45.7 | 52.8 | 55.8 | 45.2 | 68.2 | 55.9 | 33.6 | 69.5 | 39.5 | 53.2 | ||
References
- Lund, H.G. Accounting for the World’s Rangelands. Rangelands 2007, 29, 3–10. [Google Scholar] [CrossRef]
- United States Department of Agriculture. Land resource regions and major land resource areas of the United States, the Caribbean, and the Pacific Basin. U. S. Dep. Agric. Handb. 2006, 296, 669. [Google Scholar]
- Briske, D.D.; Fuhlendorf, S.D.; Smeins, F. State-and-transition models, thresholds, and rangeland health: A synthesis of ecological concepts and perspectives. Rangel. Ecol. Manag. 2005, 58, 1–10. [Google Scholar] [CrossRef]
- Hendrickson, J.R.; Sedivec, K.K.; Toledo, D.; Printz, J. Challenges Facing Grasslands inthe Northern Great Plains and North Central Region. Rangelands 2019, 41, 23–29. [Google Scholar] [CrossRef]
- Gherardi, L.A.; Sala, O.E.; Penuelas, J. Enhanced interannual precipitation variability increases plant functional diversity that in turn ameliorates negative impact on productivity. Ecol. Lett. 2015, 18, 1293–1300. [Google Scholar] [CrossRef]
- Passey, H.B.; Hugie, V.K.; Williams, E.; Ball, D. Relationships between Soil, Plant Community, and Climate on Rangelands of the Intermountain West; United States Department of Agriculture, Economic Research Service: Washington, DC, USA, 1982. [Google Scholar]
- Zhang, L.; Wylie, B.K.; Ji, L.; Gilmanov, T.G.; Tieszen, L.L. Climate-driven interannual variability in net ecosystem exchange in the northern Great Plains grasslands. Rangel. Ecol. Manag. 2010, 63, 40–50. [Google Scholar] [CrossRef]
- Chen, M.; Parton, W.J.; Hartman, M.D.; Del Grosso, S.J.; Smith, W.K.; Knapp, A.K.; Lutz, S.; Derner, J.D.; Tucker, C.J.; Ojima, D.S.; et al. Assessing precipitation, evapotranspiration, and NDVI as controls of U.S. Great Plains plant production. Ecosphere 2019, 10, e02889. [Google Scholar] [CrossRef]
- Lausch, A.; Bastian, O.; Klotz, S.; Leitão, P.J.; Jung, A.; Rocchini, D.; Schaepman, M.E.; Skidmore, A.K.; Tischendorf, L.; Knapp, S.; et al. Understanding and assessing vegetation health by in situ species and remote-sensing approaches. Methods Ecol. Evol. 2018, 9, 1799–1809. [Google Scholar] [CrossRef]
- Carter, S.K.; Fleishman, E.; Leinwand, I.I.F.; Flather, C.H.; Carr, N.B.; Fogarty, F.A.; Leu, M.; Noon, B.R.; Wohlfeil, M.E.; Wood, D.J.A. Quantifying Ecological Integrity of Terrestrial Systems to Inform Management of Multiple-Use Public Lands in the United States. Environ. Manag. 2019, 64, 1–19. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rango, A.; Laliberte, A.; Herrick, J.E.; Winters, C.; Havstad, K.; Steele, C.; Browning, D. Unmanned aerial vehicle-based remote sensing for rangeland assessment, monitoring, and management. J. Appl. Remote Sens. 2009, 3, 033542. [Google Scholar] [CrossRef]
- Maynard, C.L.; Lawrence, R.L.; Nielsen, G.A.; Decker, G. Ecological site descriptions and remotely sensed imagery as a tool for rangeland evaluation. Can. J. Remote Sens. 2007, 33, 109–115. [Google Scholar] [CrossRef]
- Marvin, D.C.; Koh, L.P.; Lynam, A.J.; Wich, S.; Davies, A.B.; Krishnamurthy, R.; Stokes, E.; Starkey, R.; Asner, G.P. Integrating technologies for scalable ecology and conservation. Glob. Ecol. Conserv. 2016, 7, 262–275. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, R.E.; Andréfouët, S.; Cohen, W.B.; Gómez, C.; Griffiths, P.; Hais, M.; Healey, S.P.; Helmer, E.H.; Hostert, P.; Lyons, M.B.; et al. Bringing an ecological view of change to Landsat-based remote sensing. Front. Ecol. Environ. 2014, 12, 339–346. [Google Scholar] [CrossRef]
- Turner, M.G. Disturbance and landscape dynamics in a changing world. Ecology 2010, 91, 2833–2849. [Google Scholar] [CrossRef] [Green Version]
- Geerken, R.; Batikha, N.; Celis, D.; DePauw, E. Differentiation of rangeland vegetation and assessment of its status: Field investigations and MODIS and SPOT VEGETATION data analyses. Int. J. Remote Sens. 2005, 26, 4499–4526. [Google Scholar] [CrossRef]
- Hunter, F.D.L.; Mitchard, E.T.A.; Tyrrell, P.; Russell, S. Inter-Seasonal Time Series Imagery Enhances Classification Accuracy of Grazing Resource and Land Degradation Maps in a Savanna Ecosystem. Remote Sens. 2020, 12, 198. [Google Scholar] [CrossRef] [Green Version]
- Schuster, C.; Schmidt, T.; Conrad, C.; Kleinschmit, B.; Förster, M. Grassland habitat mapping by intra-annual time series analysis–Comparison of RapidEye and TerraSAR-X satellite data. Int. J. Appl. Earth Obs. Geoinf. 2015, 34, 25–34. [Google Scholar] [CrossRef]
- Geerken, R.; Zaitchik, B.; Evans, J. Classifying rangeland vegetation type and coverage from NDVI time series using Fourier Filtered Cycle Similarity. Int. J. Remote Sens. 2005, 26, 5535–5554. [Google Scholar] [CrossRef]
- Tomppo, E.; Antropov, O.; Praks, J. Cropland Classification Using Sentinel-1 Time Series: Methodological Performance and Prediction Uncertainty Assessment. Remote Sens. 2019, 11, 2480. [Google Scholar] [CrossRef] [Green Version]
- Skakun, S.; Vermote, E.; Franch, B.; Roger, J.-C.; Kussul, N.; Ju, J.; Masek, J. Winter Wheat Yield Assessment from Landsat 8 and Sentinel-2 Data: Incorporating Surface Reflectance, Through Phenological Fitting, into Regression Yield Models. Remote Sens. 2019, 11, 1768. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Individual Grapevine Analysis in a Multi-Temporal Context Using UAV-Based Multi-Sensor Imagery. Remote Sens. 2020, 12, 139. [Google Scholar] [CrossRef] [Green Version]
- Pu, R.; Landry, S.; Yu, Q. Assessing the potential of multi-seasonal high resolution Pleiades satellite imagery for mapping urban tree species. Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 144–158. [Google Scholar] [CrossRef]
- Goodin, D.G.; Henebry, G.M. A technique for monitoring ecological disturbance in tallgrass prairie using seasonal NDVI trajectories and a discriminant function mixture model. Remote Sens. Environ. 1997, 61, 270–278. [Google Scholar] [CrossRef]
- Weisberg, P.J.; Dilts, T.E.; Greenberg, J.A.; Johnson, K.N.; Pai, H.; Sladek, C.; Kratt, C.; Tyler, S.W.; Ready, A. Phenology-based classification of invasive annual grasses to the species level. Remote Sens. Environ. 2021, 263, 112568. [Google Scholar] [CrossRef]
- Recuero, L.; Litago, J.; Pinzón, J.E.; Huesca, M.; Moyano, M.C.; Palacios-Orueta, A. Mapping Periodic Patterns of Global Vegetation Based on Spectral Analysis of NDVI Time Series. Remote Sens. 2019, 11, 2497. [Google Scholar] [CrossRef] [Green Version]
- Browning, D.M.; Maynard, J.J.; Karl, J.W.; Peters, D.C. Breaks in MODIS time series portend vegetation change: Verification using long-term data in an arid grassland ecosystem. Ecol. Appl. 2017, 27, 1677–1693. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Ficklin, D.; Manzoni, S.; Wang, L.; Way, D.; Phillips, R.; Novick, K.A. Response of ecosystem intrinsic water use efficiency and gross primary productivity to rising vapor pressure deficit. Environ. Res. Lett. 2019, 14, 074023. [Google Scholar] [CrossRef]
- Morisette, J.T.; Richardson, A.D.; Knapp, A.K.; Fisher, J.I.; Graham, E.A.; Abatzoglou, J.; Wilson, B.E.; Breshears, D.D.; Henebry, G.M.; Hanes, J.M.; et al. Tracking the rhythm of the seasons in the face of global change: Phenological research in the 21st century. Front. Ecol. Environ. 2009, 7, 253–260. [Google Scholar] [CrossRef] [Green Version]
- Rehnus, M.; Peláez, M.; Bollmann, K. Advancing plant phenology causes an increasing trophic mismatch in an income breeder across a wide elevational range. Ecosphere 2020, 11, e03144. [Google Scholar] [CrossRef]
- Renner, S.S.; Zohner, C.M. Climate Change and Phenological Mismatch in Trophic Interactions Among Plants, Insects, and Vertebrates. Annu. Rev. Ecol. Evol. Syst. 2018, 49, 165–182. [Google Scholar] [CrossRef]
- Carter, S.K.; Rudolf, V.H.W. Shifts in phenological mean and synchrony interact to shape competitive outcomes. Ecology 2019. [Google Scholar] [CrossRef]
- Beard, K.H.; Kelsey, K.C.; Leffler, A.J.; Welker, J.M. The Missing Angle: Ecosystem Consequences of Phenological Mismatch. Trends Ecol. Evol. 2019, 100, e02826. [Google Scholar] [CrossRef]
- Ren, S.; Li, Y.; Peichl, M. Diverse effects of climate at different times on grassland phenology in mid-latitude of the Northern Hemisphere. Ecol. Indic. 2020, 113, 106260. [Google Scholar] [CrossRef]
- Yang, L.; Wylie, B.K.; Tieszen, L.L.; Reed, B.C. An analysis of relationships among climate forcing and time-integrated NDVI of grasslands over the US northern and central Great Plains. Remote Sens. Environ. 1998, 65, 25–37. [Google Scholar] [CrossRef]
- Petrie, M.; Brunsell, N.; Vargas, R.; Collins, S.; Flanagan, L.; Hanan, N.; Litvak, M.; Suyker, A. The sensitivity of carbon exchanges in Great Plains grasslands to precipitation variability. J. Geophys. Res. Biogeosci. 2016, 121, 280–294. [Google Scholar] [CrossRef] [Green Version]
- Matongera, T.N.; Mutanga, O.; Sibanda, M.; Odindi, J. Estimating and Monitoring Land Surface Phenology in Rangelands: A Review of Progress and Challenges. Remote Sens. 2021, 13, 2060. [Google Scholar] [CrossRef]
- Park, D.S.; Newman, E.A.; Breckheimer, I.K. Scale gaps in landscape phenology: Challenges and opportunities. Trends Ecol. Evol. 2021, 36, 709–721. [Google Scholar] [CrossRef] [PubMed]
- Cowles, J.; Boldgiv, B.; Liancourt, P.; Petraitis, P.S.; Casper, B.B. Effects of increased temperature on plant communities depend on landscape location and precipitation. Ecol. Evol. 2018, 8, 5267–5278. [Google Scholar] [CrossRef] [PubMed]
- Richardson, A.D.; Keenan, T.F.; Migliavacca, M.; Ryu, Y.; Sonnentag, O.; Toomey, M. Climate change, phenology, and phenological control of vegetation feedbacks to the climate system. Agric. For. Meteorol. 2013, 169, 156–173. [Google Scholar] [CrossRef]
- Rapinel, S.; Mony, C.; Lecoq, L.; Clément, B.; Thomas, A.; Hubert-Moy, L. Evaluation of Sentinel-2 time-series for mapping floodplain grassland plant communities. Remote Sens. Environ. 2019, 223, 115–129. [Google Scholar] [CrossRef]
- Klosterman, S.; Melaas, E.; Wang, J.A.; Martinez, A.; Frederick, S.; O’Keefe, J.; Orwig, D.A.; Wang, Z.; Sun, Q.; Schaaf, C.; et al. Fine-scale perspectives on landscape phenology from unmanned aerial vehicle (UAV) photography. Agric. For. Meteorol. 2018, 248, 397–407. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Sankey, T.T.; Leonard, J.M.; Moore, M.M. Unmanned Aerial Vehicle—Based Rangeland Monitoring: Examining a Century of Vegetation Changes. Rangel. Ecol. Manag. 2019, 72, 858–863. [Google Scholar] [CrossRef]
- McClelland, M.P.; van Aardt, J.; Hale, D. Manned aircraft versus small unmanned aerial system—forestry remote sensing comparison utilizing lidar and structure-from-motion for forest carbon modeling and disturbance detection. J. Appl. Remote Sens. 2019, 14, 14. [Google Scholar] [CrossRef]
- Karl, J.W.; Yelich, J.V.; Ellison, M.J.; Lauritzen, D. Estimates of Willow (Salix Spp.) Canopy Volume using Unmanned Aerial Systems. Rangel. Ecol. Manag. 2020, 73, 531–537. [Google Scholar] [CrossRef]
- Poley, L.G.; Laskin, D.N.; McDermid, G.J. Quantifying Aboveground Biomass of Shrubs Using Spectral and Structural Metrics Derived from UAS Imagery. Remote Sens. 2020, 12, 2199. [Google Scholar] [CrossRef]
- Poley, L.G.; McDermid, G.J. A Systematic Review of the Factors Influencing the Estimation of Vegetation Aboveground Biomass Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 1052. [Google Scholar] [CrossRef] [Green Version]
- Gillan, J.K.; Karl, J.W.; van Leeuwen, W.J.D. Integrating drone imagery with existing rangeland monitoring programs. Environ. Monit. Assess. 2020, 192, 269. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Yi, S.; Hou, F.; Luo, D.; Hu, J.; Zhou, Z. Quantifying the Dynamics of Livestock Distribution by Unmanned Aerial Vehicles (UAVs): A Case Study of Yak Grazing at the Household Scale. Rangel. Ecol. Manag. 2020, 73, 642–648. [Google Scholar] [CrossRef]
- Gillan, J.K.; McClaran, M.P.; Swetnam, T.L.; Heilman, P. Estimating Forage Utilization with Drone-Based Photogrammetric Point Clouds. Rangel. Ecol. Manag. 2019, 72, 575–585. [Google Scholar] [CrossRef]
- Park, J.Y.; Muller-Landau, H.C.; Lichstein, J.W.; Rifai, S.W.; Dandois, J.P.; Bohlman, S.A. Quantifying Leaf Phenology of Individual Trees and Species in a Tropical Forest Using Unmanned Aerial Vehicle (UAV) Images. Remote Sens. 2019, 11, 1534. [Google Scholar] [CrossRef] [Green Version]
- Neumann, C.; Behling, R.; Schindhelm, A.; Itzerott, S.; Weiss, G.; Wichmann, M.; Müller, J.; Horning, N.; Cord, A. The colors of heath flowering–quantifying spatial patterns of phenology in Calluna life-cycle phases using high-resolution drone imagery. Remote Sens. Ecol. Conserv. 2020, 6, 35–51. [Google Scholar] [CrossRef] [Green Version]
- Vilar, P.; Morais, T.G.; Rodrigues, N.R.; Gama, I.; Monteiro, M.L.; Domingos, T.; Teixeira, R.F.M. Object-Based Classification Approaches for Multitemporal Identification and Monitoring of Pastures in Agroforestry Regions using Multispectral Unmanned Aerial Vehicle Products. Remote Sens. 2020, 12, 814. [Google Scholar] [CrossRef] [Green Version]
- Smith, W.K.; Dannenberg, M.P.; Yan, D.; Herrmann, S.; Barnes, M.L.; Barron-Gafford, G.A.; Biederman, J.A.; Ferrenberg, S.; Fox, A.M.; Hudson, A.; et al. Remote sensing of dryland ecosystem structure and function: Progress, challenges, and opportunities. Remote Sens. Environ. 2019, 233, 111401. [Google Scholar] [CrossRef]
- Pepe, M.; Fregonese, L.; Scaioni, M. Planning airborne photogrammetry and remote-sensing missions with modern platforms and sensors. Eur. J. Remote Sens. 2018, 51, 412–436. [Google Scholar] [CrossRef]
- Akasheh, O.Z.; Neale, C.M.U.; Jayanthi, H. Detailed mapping of riparian vegetation in the middle Rio Grande River using high resolution multi-spectral airborne remote sensing. J. Arid Environ. 2008, 72, 1734–1744. [Google Scholar] [CrossRef]
- Dietrich, J.T. Riverscape mapping with helicopter-based Structure-from-Motion photogrammetry. Geomorphology 2016, 252, 144–157. [Google Scholar] [CrossRef]
- Bongers, F. Methods to assess tropical rain forest canopy structure: An overview. Plant Ecol. 2001, 153, 263–277. [Google Scholar] [CrossRef]
- Granholm, A.-H.; Olsson, H.; Nilsson, M.; Allard, A.; Holmgren, J. The potential of digital surface models based on aerial images for automated vegetation mapping. Int. J. Remote Sens. 2015, 36, 1855–1870. [Google Scholar] [CrossRef]
- St-Onge, B.; Vega, C.; Fournier, R.A.; Hu, Y. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364. [Google Scholar] [CrossRef]
- Franke, U.; Goll, B.; Hohmann, U.; Heurich, M. Aerial ungulate surveys with a combination of infrared and high–resolution natural colour images. Anim. Biodivers. Conserv. 2012, 35, 285–293. [Google Scholar] [CrossRef]
- Zheng, H.; Ma, J.; Zhou, M.; Li, D.; Yao, X.; Cao, W.; Zhu, Y.; Cheng, T. Enhancing the Nitrogen Signals of Rice Canopies across Critical Growth Stages through the Integration of Textural and Spectral Information from Unmanned Aerial Vehicle (UAV) Multispectral Imagery. Remote Sens. 2020, 12, 957. [Google Scholar] [CrossRef] [Green Version]
- Immerzeel, W.W.; Kraaijenbrink, P.D.A.; Shea, J.M.; Shrestha, A.B.; Pellicciotti, F.; Bierkens, M.F.P.; de Jong, S.M. High-resolution monitoring of Himalayan glacier dynamics using unmanned aerial vehicles. Remote Sens. Environ. 2014, 150, 93–103. [Google Scholar] [CrossRef]
- Sherwood, C.R.; Warrick, J.A.; Hill, A.D.; Ritchie, A.C.; Andrews, B.D.; Plant, N.G. Rapid, Remote Assessment of Hurricane Matthew Impacts Using Four-Dimensional Structure-from-Motion Photogrammetry. J. Coast. Res. 2018, 34, 1303–1316. [Google Scholar] [CrossRef] [Green Version]
- Warrick, J.A.; Ritchie, A.C.; Adelman, G.; Adelman, K.; Limber, P.W. New Techniques to Measure Cliff Change from Historical Oblique Aerial Photographs and Structure-from-Motion Photogrammetry. J. Coast. Res. 2017, 33, 39–55. [Google Scholar] [CrossRef] [Green Version]
- Deur, M.; Gašparović, M.; Balenović, I. An Evaluation of Pixel- and Object-Based Tree Species Classification in Mixed Deciduous Forests Using Pansharpened Very High Spatial Resolution Satellite Imagery. Remote Sens. 2021, 13, 1868. [Google Scholar] [CrossRef]
- Prošek, J.; Šímová, P. UAV for mapping shrubland vegetation: Does fusion of spectral and vertical information derived from a single sensor increase the classification accuracy? Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 151–162. [Google Scholar] [CrossRef]
- Foody, G.M. Impacts of ignorance on the accuracy of image classification and thematic mapping. Remote Sens. Environ. 2021, 259, 112367. [Google Scholar] [CrossRef]
- Snyder, K.; Wehan, B.; Filippa, G.; Huntington, J.; Stringham, T.; Snyder, D. Extracting Plant Phenology Metrics in a Great Basin Watershed: Methods and Considerations for Quantifying Phenophases in a Cold Desert. Sensors 2016, 16, 1948. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Evans, R.D.; Black, R.A. Growth, Photosynthesis, and Resource Investment for Vegetative and Reproductive Modules of Artemisia Tridentata. Ecology 1993, 74, 1516–1528. [Google Scholar] [CrossRef]
- Villoslada, M.; Bergamo, T.F.; Ward, R.D.; Burnside, N.G.; Joyce, C.B.; Bunce, R.G.H.; Sepp, K. Fine scale plant community assessment in coastal meadows using UAV based multispectral data. Ecol. Indic. 2020, 111, 105979. [Google Scholar] [CrossRef]
- Jones, H.G.; Vaughan, R.A. Remote Sensing of Vegetation: Principles, Techniques, and Applications; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Soil Survey Staff. Web Soil Survey; USDA: Washington, DC, USA, 2019; Volume 2019. [Google Scholar]
- Daly, C.; Halbleib, M.; Smith, J.I.; Gibson, W.P.; Doggett, M.K.; Taylor, G.H.; Curtis, J.; Pasteris, P.P. Physiographically sensitive mapping of climatological temperature and precipitation across the conterminous United States. Int. J. Climatol. 2008, 28, 2031–2064. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- DiGiacomo, A.E.; Bird, C.N.; Pan, V.G.; Dobroski, K.; Atkins-Davis, C.; Johnston, D.W.; Ridge, J.T. Modeling Salt Marsh Vegetation Height Using Unoccupied Aircraft Systems and Structure from Motion. Remote Sens. 2020, 12, 2333. [Google Scholar] [CrossRef]
- van Iersel, W.; Straatsma, M.; Addink, E.; Middelkoop, H. Monitoring height and greenness of non-woody floodplain vegetation with UAV time series. ISPRS J. Photogramm. Remote Sens. 2018, 141, 112–123. [Google Scholar] [CrossRef]
- Mumby, P.J.; Edwards, A.J. Mapping marine environments with IKONOS imagery: Enhanced spatial resolution can deliver greater thematic accuracy. Remote Sens. Environ. 2002, 82, 248–257. [Google Scholar] [CrossRef]
- Ferro, C.J.S.; Warner, T.A. Scale and texture in digital image classification. Photogramm. Eng. Remote Sens. 2002, 68, 51–63. [Google Scholar]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Stehman, S.V.; Foody, G.M. Key issues in rigorous accuracy assessment of land cover products. Remote Sens. Environ. 2019, 231, 111199. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Gao, F.; Liu, Y.; Schaaf, C.; Friedl, M.; Yu, Y.; Jayavelu, S.; Gray, J.; Liu, L.; et al. Exploration of scaling effects on coarse resolution land surface phenology. Remote Sens. Environ. 2017, 190, 318–330. [Google Scholar] [CrossRef] [Green Version]
- Hanes, J.M.; Liang, L.; Morisette, J.T. Land Surface Phenology. In Biophysical Applications of Satellite Remote Sensing; Remote Sensing/Photogrammetry; Springer: Berlin/Heidelberg, Germany, 2014; pp. 99–125. [Google Scholar]
- Chen, X.; Wang, W.; Chen, J.; Zhu, X.; Shen, M.; Gan, L.; Cao, X. Does any phenological event defined by remote sensing deserve particular attention? An examination of spring phenology of winter wheat in Northern China. Ecol. Indic. 2020, 116, 106456. [Google Scholar] [CrossRef]
- O’Connell, J.L.; Alber, M.; Pennings, S.C. Microspatial Differences in Soil Temperature Cause Phenology Change on Par with Long-Term Climate Warming in Salt Marshes. Ecosystems 2019, 23, 498–510. [Google Scholar] [CrossRef]
- Gérard, M.; Vanderplanck, M.; Wood, T.; Michez, D. Global warming and plant–pollinator mismatches. Emerg. Top. Life Sci. 2020, 4, 77–86. [Google Scholar] [CrossRef] [Green Version]
- Lopatin, J.; Dolos, K.; Kattenborn, T.; Fassnacht, F.E.; Horning, N.; Armenteras, D. How canopy shadow affects invasive plant species classification in high spatial resolution remote sensing. Remote Sens. Ecol. Conserv. 2019, 5, 302–317. [Google Scholar] [CrossRef]
- Verbesselt, J.; Hyndman, R.; Zeileis, A.; Culvenor, D. Phenological change detection while accounting for abrupt and gradual trends in satellite image time series. Remote Sens. Environ. 2010, 114, 2970–2980. [Google Scholar] [CrossRef] [Green Version]
- Elkind, K.; Sankey, T.T.; Munson, S.M.; Aslan, C.E.; Horning, N. Invasive buffelgrass detection using high-resolution satellite and UAV imagery on Google Earth Engine. Remote Sens. Ecol. Conserv. 2019, 5, 318–331. [Google Scholar] [CrossRef]
- Alvarez-Vanhard, E.; Houet, T.; Mony, C.; Lecoq, L.; Corpetti, T. Can UAVs fill the gap between in situ surveys and satellites for habitat mapping? Remote Sens. Environ. 2020, 243, 111780. [Google Scholar] [CrossRef]
- Rigge, M.; Homer, C.; Shi, H.; Meyer, K.D. Validating a Landsat Time-Series of Fractional Component Cover Across Western U.S. Rangelands. Remote Sens. 2019, 11, 3009. [Google Scholar] [CrossRef] [Green Version]
- Wood, D.J.A.; Preston, T.M. UAV Based Vegetation Classification Results and Input NDVI, Vegetation Height, and Texture Datasets for Two Montana Rangeland Sites in 2018; U.S. Geological Survey data release; U.S. Geological Survey: Reston, VA, USA, 2022. [Google Scholar] [CrossRef]






| Flight | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Site/Date | May-2 | May-30 | June-12 | June-27 | July-19 | Aug-4 | Aug-19 | Sep-10 | Oct-1 |
| Argenta |  |  |  |  |  |  |  |  |  |
| Virginia City |  |  |  |  |  |  |  |  |  |
| Scenario | ||||||||
|---|---|---|---|---|---|---|---|---|
| Site | Single | Limited | Spring | All | ||||
| Overall | Kappa | Overall | Kappa | Overall | Kappa | Overall | Kappa | |
| Argenta | ||||||||
| Base Categories | 50.6% | 0.50 | 51.6% | 0.51 | 52.5% | 0.52 | 61.4% | 0.61 |
| Subcategories | --- | --- | --- | --- | 45.6% | 0.46 | 51.8% | 0.52 |
| Virginia City | ||||||||
| Base Categories | 59.0% | 0.59 | 60.2% | 0.60 | 61.6% | 0.62 | 64.4% | 0.64 |
| Subcategories | --- | --- | 44.9% | 0.39 | 46.6% | 0.40 | 53.2% | 0.53 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wood, D.J.A.; Preston, T.M.; Powell, S.; Stoy, P.C. Multiple UAV Flights across the Growing Season Can Characterize Fine Scale Phenological Heterogeneity within and among Vegetation Functional Groups. Remote Sens. 2022, 14, 1290. https://doi.org/10.3390/rs14051290
Wood DJA, Preston TM, Powell S, Stoy PC. Multiple UAV Flights across the Growing Season Can Characterize Fine Scale Phenological Heterogeneity within and among Vegetation Functional Groups. Remote Sensing. 2022; 14(5):1290. https://doi.org/10.3390/rs14051290
Chicago/Turabian StyleWood, David J. A., Todd M. Preston, Scott Powell, and Paul C. Stoy. 2022. "Multiple UAV Flights across the Growing Season Can Characterize Fine Scale Phenological Heterogeneity within and among Vegetation Functional Groups" Remote Sensing 14, no. 5: 1290. https://doi.org/10.3390/rs14051290