1. Introduction
Around the 2000s, three major technological breakthroughs were decisive in the creation of new low-cost mobile acquisition platforms [
1,
2,
3,
4]. One of these breakthroughs was the arrival of brushless motors [
5]. Their piloting by digital commands make it possible to control very finely, and in real time, the generated thrust. Moreover, the absence of brushes makes them very efficient and durable. On the other hand, the advances in smartphones have allowed for the emergence of two other breakthroughs, namely lithium polymer batteries [
6] and the miniaturization of inertial units, thanks to
microelectromechanical systems (MEMS) [
7]. These new technical possibilities have enabled the emergence of new agile and small platforms operating at low altitudes, such as quadricopters [
8,
9]. At the same time, smartphones have also made it possible to develop increasingly small and high-performance imaging sensors, particularly thanks to
complementary metal oxide semiconductor (CMOS) technology [
10]. The combination of these new agile platforms with these new miniaturized and high-performance sensors has enabled the spectacular explosion of drones that we have known about for over ten years.
From the point of view of remote sensing, the data provided by these new acquisition platforms are very interesting [
11,
12], as they effectively complement the classic data acquired by airplanes and satellites [
13]. Indeed, whereas the reduced swath and low endurance limit them to local sites (small spatial extent), they offer access to very high resolutions and on-demand acquisitions. In addition, the low cost of equipment, and the rapidity of training to become a remote pilot, make this type of acquisition very accessible. This context therefore explains the formidable and rapid development of close-range remote sensing and can represent great professional opportunities for young engineers, from acquisition to image processing. However, to take advantage of it, it is important to prepare the new generation of students for the specificities of close-range remote sensing before they graduate.
1.1. Teaching Close-Range Remote Sensing
Compared to classic remote sensing [
14,
15,
16,
17], these specificities further broaden the already vast interdisciplinarity in the field (geographic information systems, spatial analysis, photogrammetry, etc.). Among others, to design and build an acquisition platform or sensor, or simply to ensure their maintenance, it is necessary to have solid foundations in mechanics, electronics, command and control, embedded real-time programming, constrained algorithms, and autonomous behaviour [
18]. Another key point is the data acquisition itself. In fact, operating these platforms in the field require up-to-date knowledge of the legislation as well as piloting. It also requires mastering in situ practices adapted to the study environments, especially as close-range remote sensing has now extended to underwater environments. Moreover, managing the shootings to ensure the data completion of the study area requires in-depth signal processing and computer science skills. Moreover advanced computer vision skills are needed to adapt to the new paradigm brought about by close-range remote sensing.
Thus, although close-range remote sensing is a particularly applied field, it nevertheless involves the acquisition by students of a great deal of specific theoretical knowledge before it can be put into practice on real systems. Moreover, this represents “a huge mountain to climb”, particularly for digital native students [
19].
Indeed, with the democratization of digital technology (computer, internet, smartphone, electronic toys, etc.) in their daily lives [
20,
21], undergraduate students have faced an “over-demand” of their attention from a very young age [
22,
23]. As a result, these digital natives have developed strategies to filter the many solicitations of their surroundings and to effectively share their attention [
24,
25]. Among the consequences of these new behaviours, they need to “perceive” quick progress and concrete achievements to stay motivated and focused. Thus, these students are comfortable and skilled in the practical acquisitions of technical skills because they are directly in the action. However, unlike previous generations, they encounter more difficulties in acquiring theoretical knowledge because they are placed in more passive positions.
To take this new paradigm into account, many e-learning platforms have been created, which bring together courses and learning materials dedicated to remote sensing, intended for students and teachers alike [
26,
27,
28,
29,
30,
31,
32].
In addition to these technological tools, many methods allow reverting from passive to active learning [
33,
34,
35], such as problem-based [
36,
37] or project-based approaches. The latter has particularly contributed to changing and enriching the teaching of remote sensing [
38]. In particular, the emergence of close-range remote sensing platforms, such as drones, offers the possibility of setting-up concrete projects covering the entire chain (from acquisition to data processing) [
39,
40,
41,
42]. They complement projects based on image processing and the use of traditional remote sensing tools, such as GIS [
43,
44,
45,
46] These active methods are particularly effective in engaging and motivating students. They encourage a better understanding of the concepts covered. Design thinking tools [
47,
48,
49,
50] are also good resources to use for active learning. The fact that they are based on collaborative mechanisms makes them very effective for learning [
51,
52].
Other active learning techniques include educational games [
53], such as simulation games [
54,
55,
56], which have already been introduced in remote sensing courses [
57], and serious games [
58,
59]. Their vocation is to facilitate the practice of skills, the transfer of knowledge, and the resolution of cognitive or social problems or the contribution of knowledge through exploration [
60,
61]. They are very immersive because they leave a possibility for participants to experience scenarios [
62,
63,
64,
65,
66]. They offer rich and diverse multimodal interactions and generate strong motivation and player involvement [
67]. What differentiates serious games from simulation games is the skill level required of the players [
68]. Serious games offer a simplified version of reality and are therefore more accessible with no prior basic knowledge of the domain. Whereas simulation games are intended to stick as closely and accurately as possible to reality and are therefore more suitable for experimented players.
1.2. A New Serious Game to Boost the Acquisition of Knowledge
Facing the same learning difficulties with this generation of digital natives during the construction of our remote sensing courses, we first apply a problem-based approach. We build them starting from the applications of the domain and we then go up to the tools necessary to process them. By emphasizing meaning in this way, we can better capture the attention of students. We use science and remote sensing history to contextualize knowledge, and the narrative, which is mainly based on historical anecdotes, allows students to better memorize information. Moreover, we use real datasets from our own acquisition campaigns in different environments (aerial, underwater, etc.) to concretely illustrate applications of the theory and feed the practical exercises given to students. Working on real datasets used in our current research activities gives our students a professional context and encourages them to be more involved.
We end each course with a project-based approach to concretize all of the knowledge and know-how covered. For this, we designed dedicated platforms adapted to educational use, which are inspired by our own research prototypes to put into concrete application all of the knowledge and know-how covered in the course [
69]. For example, students must build a wheel vector capable of following a trajectory that they have extracted from an aerial image or following a prior unknown trajectory, thanks to an on-board camera. Other projects focus on extracting information from satellite images, such as tracking and calculating the trajectory of recent cyclones, estimating sea recession or the size of eddies during a tsunami, or even the detection of recent volcanic eruptions or forest fires. This allows building applicative scenarios for the students. They are passionate about the realization of these complex projects. It enhances their critical thinking and problem-solving skills and leads them to develop creative and innovative solutions.
However, the problem-based approach is not enough to sufficiently involve digital native students until we get to the real practice with the project-based approach. Therefore, finding active and fun educational methods to shorten this initial theoretical time and allow students without prior knowledge to arrive more quickly to the first practical results was obvious.
We already use design thinking tools in our courses in the form of cooperative intelligence workshops to punctually revert from passive to active learning (for example, to address the legislation part). Although they are adapted so that the students easily appropriate a good global vision of the field and its challenges, it is difficult to make them grasp in one session (three hours) the complexity of the architecture of the acquisition system involved, as well as the complexity and the skills necessary to deploy them in the field in order to acquire and process quality remote sensing data. The result remains too superficial and lacks concrete. Thus, educational games seemed to be very promising and interesting tools to get through what we were lacking and to achieve our goal within the desired time constraints. Serious games seem more appropriate than simulation games to start the course.
We specifically developed a serious game since no existing serious game meets our constraints or thematic objectives. The underlying pedagogy of our serious game is based on collaborative active learning where players have to build their own virtual close-range remote sensing robot by helping each other and perform mock field tests to successfully complete the final acquisition mission and obtained the processed data. All of the necessary knowledge is included in the game. In this way, students of all educational levels and without prior knowledge in the field can participate without inconvenience and discover this new universe at their own pace.
This game, used as a starting point, allows them to understand and memorize the outlines of the concepts that we intend to cover in detail later in the course. This structured and organized vision acquired through playing the serious game is an important educational lever for learning in a complex and interdisciplinary field [
70,
71,
72].
The design process we follow is described in
Section 2 and
Section 3. We explain our starting point, what we want to incorporate into the experience, and how we did it.
Section 4 summarizes the balancing and the sequencing of a game session.
We then present the results and discuss them in
Section 5, based on our feedback from four years of experiments with hundreds of students divided in sessions of ten to fifty players. Finally, we conclude this article in
Section 6.
2. The Interest of Using a Haggle Game as a Teaching Tool
Our serious game is based on the mechanics of the Haggle game.In this section, we present the principle of the original game, the key points of close-range remote sensing that we seek to convey to the students, and why a Haggle-like game is appropriate for this use.
2.1. Principle of a Haggle Game
The original Haggle game, created in 1963 by [
73], is a bargaining game that brings players to negotiate with each other. This is a material game, not a digital game. Game elements are made up of cards. Some of them, the items, are colored and have different shapes. The other cards explain the rules of the game and how to earn points (“each red card is worth 5 points”, “a green card is worth three times the value of a blue card”, “if a player presents a yellow card, the green cards are worth nothing”, etc.). All of these cards are distributed randomly in equal quantities between the players at the start of the game.
The players then have to exchange information and game elements with each other to improve their understanding of the rules as well as to improve their hand. Thus, they seek to compose the best collection of items for the end of the game. The game master then calculates the final score of all the collections: the one that earns the most points wins.
This is a game intended for a large group of people, whose duration can greatly vary depending on the use: a game can last an hour or several days as a common thread during an event. The Haggle game, now being in the public domain, many variations have been created. They enriched the initial game by opening up to new themes (magic spells [
74], cooking recipes [
75], etc.) or to new possibilities by introducing various physical elements (pearls, tokens, etc.) or a currency to diversify exchanges.
The Haggle game in its initial form can be directly used as a serious game in studies related to trade, for example, thanks to the mechanics of bargaining, which stands at the heart of the game. However, for a technical field, such as remote sensing, it is necessary to make consequent adjustments to its mechanism to take into account the key points of the theme in order to be of use as an educational tool.
Through the use of the serious game, we want students to grasp the following key points of close-range remote sensing:
The great diversity of close-range remote sensing applications (environmental, archaeological, agricultural, military, etc.) as well as the great diversity of products (traditional or thematic maps, 3D data, etc.).
The great diversity of operating environments (air, land, sea, submarine).
The great diversity of both close-range remote sensing platforms (aerial fixed or rotary wing, aerial glider, kites, rovers, motorized or sailing boats, autonomous or remotely operated underwater robots, etc.) and payloads (LiDAR, radar, RGB camera, multi-/hyper-spectral sensors, etc.), as well as their particularities.
Moreover, we want to provide them with sufficient knowledge of the system architecture of drones so that they are able to build a relevant solution to a given realistic situation. This mastery is also essential to deal with technical problems encountered while operating an acquisition platform. Indeed, the blend of electronics, computer programs, and mechanics gives rise to many complex problems to be solved, such as random or difficult to reproduce problems.
Finally, we also seek to awaken important soft skills for implementation in the field:
Adaptation: field tests or missions are planned in advance and dates cannot be easily changed due to the logistics involved. It is therefore necessary to constantly adapt to real conditions, whether it is unforeseen events concerning the terrain or weather conditions (rain, wind, storm, mud, rough terrain, swell, current, poor visibility, etc.).
Anticipation: because it is important to bring the right equipment to the field in order to be able to find the source of a problem (debug) and possibly carry out a repair in any situation.
Innovation and creativity: because there is not always the optimal equipment to repair in the field but alternatives can be found. What is important is to make the field time profitable.
Mutual aid: to be able to cope with the many difficulties encountered. This is something that we have observed many times, whether during field workshops with researchers or during participation in international competitions in a real environment [
76,
77] such as the European Robotics League [
78] Emergency Tournament (formerly SAUC-E contest at La Spezia for the underwater part). Participants benefit from discussions and support within a community to improve their own results.
2.2. Why the Haggle Game Is a Good Starting Point
In regard to the context posed in the previous section, three points of the mechanics of the original Haggle game are interesting to offer an active discovery of close-range remote sensing both from an engineering and scientific point of view: the ambivalence of “individual competition and mutual aid”, the discovery of the rules by the participants during the game (and not before the game), and the flexibility of the game on the choice of items and rules.
The first two points correspond very well to the previously exposed constraints. As for the last point; that is to say, the possibility to easily change the game elements (rules as well as items), it facilitates the creation of thematic variations. In addition, this faculty also offers the flexibility to create very rich and varied scenarios for each game session at a negligible cost in time. The mechanics of the Haggle game are therefore a good starting point for creating our educational serious game for close-range remote sensing.
3. Adaptation of a Haggle Game to the Field of Close-Range Remote Sensing
We use our own design and field experience to adapt the Haggle game to the essential notions of close-range remote sensing that we want to convey to the students. The game we created makes students build their own remote sensing robots adapted to a given acquisition mission while respecting the rules of robotic system architecture, and go through testing phases until carrying out the final field mission.
In this section, we review the changes made to thematize the Haggle game on close-range remote sensing. Through this information, we hope to be able to inspire the creation of other thematic versions for other areas.
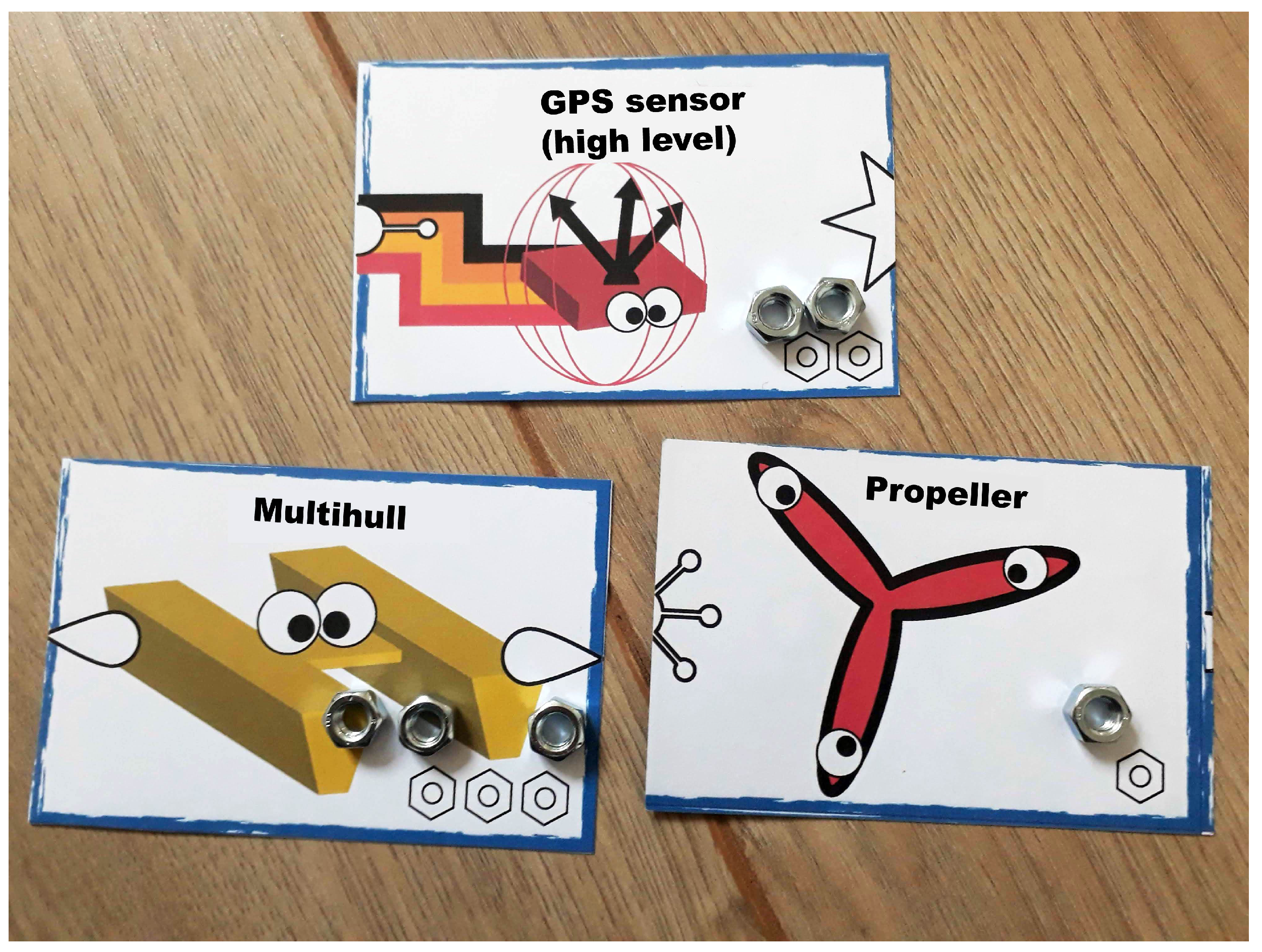
3.1. Adaptation of Game Elements: Items
Regarding the items (see
Figure 1a), we opted for cards representing the essential components of mobile acquisition systems both from a material point of view (wheels, propellers, motors, ESCs, motherboards, batteries, altitude sensor, heading sensor, etc.), as well as from an algorithm point of view (attitude control loop, target detection, target tracking, area mapping, navigation, etc.).
We deliberately did not choose physical item elements that actually fit together, to not make the game and its logistics too complex. Indeed, it would have required a much longer playing time without significant benefits. To simulate physical constraints, such as specific communications links, the elements drawn on the cards have connectors that make it possible to know with which other elements they are potentially compatible (see
Figure 1b).
3.2. Adaptation of Game Elements: Rules
Regarding the rules, we created two distinct kinds: mission rules and system rules. The mission rules describe the final mission that the acquisition system must achieve: the more the final built acquisition system is suited to this mission, the more points it earns. Each mission rule is dedicated to a main criterion of the mission and is chosen from a set of possibilities. There are eight criteria: the final goal (a mapping, monitoring, exploration or study mission for example), the type (indoor or outdoor mission), the environment (air, land, surface or underwater), the lighting conditions (natural or artificial), the required endurance (duration of the mission or size of the surveyed area), the distance from the ground operating station, the in situ level of difficulty (presence of obstacles, cramped spaces, open area, etc.), and the required waterproofing level. With this organization that offers a wide variety of scenarios, it is obviously very easy to create a different final mission for each new game session. An example of a mission thus composed would be: “a deep underwater outdoor mission without natural light, on a large open area far from the ground station where we are trying to map coral species”.
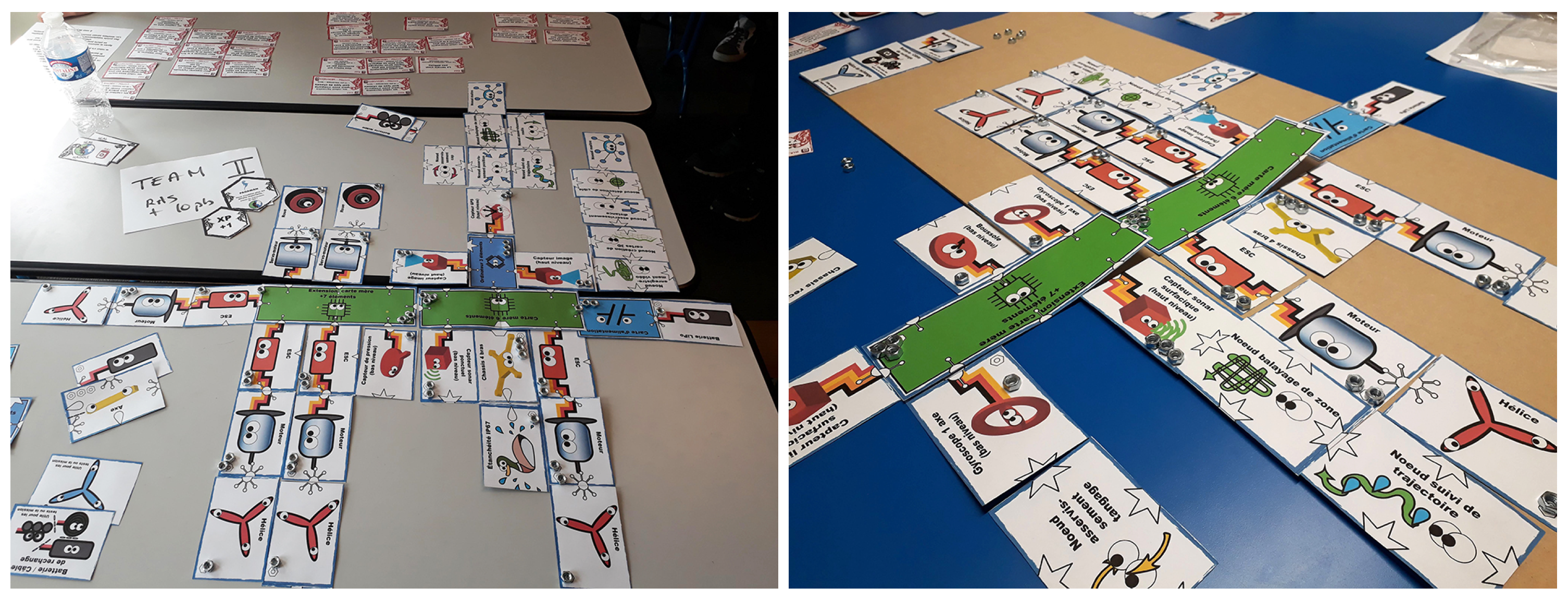
As for system rules (see
Figure 2), they are numerous enough (124 rules) to cover the basics of the system architecture of a mobile platform and to deal with all scenarios. They are organized in five categories: energy (14 rules), mechanics (21 rules), propulsion (43 rules), control (31 rules) and command (15 rules). Here are some examples of rules: “a flying robot moves with propellers”, “a propeller is driven by a motor”, “a motor is controlled by an ESC”, “an ESC plugs into the motherboard”, etc. With these simple rules, players without prior knowledge in this field can build a cohesive acquisition platform suitable for the mission, as shown in
Figure 1b.
3.3. Addition of a Trading Currency
To facilitate trade, we have introduced a currency. It is in the form of bolts, which we call “botcoins”. These are not only used in negotiations: they are also needed to validate the cards used to build the acquisition platform as we can see in
Figure 3. Each hardware element has a cost: some perform better than others, but they cost more. It is up to the players to see what will bring them the most at the end in terms of score, and according to the choices available to them.
We also leave the possibility of opening a store during the game to boost exchanges. Participants can trade their items with those of the merchant (a role that can be played by the game master or a third person). When the store opens, it only has botcoins. The merchant sets the prices to continuously adjust the tension on the game elements.
3.4. Addition of Field Test Simulations
The previous elements allow the students to integrate the technical knowledge on the design and operation of acquisition platforms. To tackle the skills that must be deployed to succeed in a close-range remote sensing mission, we introduce the notion of field tests and final mission.
Thus, several field test simulations take place at set times and a final mission ends the game. Fixed schedules make students feel the importance of being ready on time because the logistics of tests in real conditions must be planned in advance (preparation of equipment, travel authorizations, weather windows, time slots, etc.).
Simulations use a deck of event cards (see
Figure 4a) that are based on what we experienced in real situations. These events are organized into different categories: those linked to oversights or lack of preparation (mistakes of beginner), those linked to minor problems encountered in the field (foreseeable events such as the breakage of some elements), those over which we have little control (events that cannot be predictable to some extent such as weather or environmental conditions), and those that correspond to major incidents (such as crash or collision).
Drawn at random from the deck, they have direct positive or negative consequences for the players: withdrawal of one of their item cards from the acquisition system, time penalty (ban on playing for a certain number of minutes), gain in botcoins or gain in points if it is the final mission.
All actions (exchanges, modification of the platforms, etc.) are frozen when a test starts and the players are gathered. Observation of what happens to other participants in the tests also allows students to gain experience. Concretely, players cards of level of experience (see
Figure 4b). The more experienced the players are, the less vulnerable they will be to the events of the first categories. These cards are the only non-tradable components of the game during negotiations, as experience can only be acquired on your own.
4. Game Mechanics
To conclude the description of our serious game, in this section, we review the elements that are necessary for its operational deployment.
4.1. Game Sizing
Once the game mechanics have been defined, the final design phase is to adjust the different quantities involved in the serious game to the total number of players to ensure an efficient game-play. We focus on the fourth main important points.
The first point concerns the size of the play area and the number of participants in a game. Our serious game requires space to lay out the cards of each platform being built and the other materials. In practice, we have observed that the most dynamic sessions are obtained when the number of competing acquisition platforms is between 10 and 15. Thus, the students play individually when their number is of this order. Moreover when we work at the classroom level; that is to say, with around 50 students, we form teams. In this case, it naturally further strengthens the team spirit of the group.
The second point is to adjust the amount of cards and botcoins to put into the game with regard to the number of participants. Indeed, it is necessary to create some tension on the elements of the game to promote bargaining. This prevents all players from converging on a single solution that uses the most appropriate material and allows the emergence of original solutions to overcome the shortcomings. It also introduces them to the reality of the means available in research.
The third point is to verify that the probability of occurrence of each type of events during tests is well calibrated to maintain a realistic gameplay. For example, some events, such as the crash card, should not come out often. However if they can come out at least once in the game, which is better for the experience of players. It is also necessary to verify that the highest levels of experience are attainable in the game while ensuring that all players do not necessarily reach them at the end of the game.
Finally, the last point concerns the importance of correctly adjusting the duration of each sequence of the serious game. In practice, in a game where there are 10–15 acquisition platforms competing, we ended up adjusting the construction/negotiation phases around 20 min and the test/final mission phases to around 10–15 min for a total duration of less than 3 h.
4.2. Course of a Game
During the preparation phase, the game master chooses the cards that define the final mission. Then, the quantities of rule cards, mission cards, and item cards can be adapted to the number of players. All of these cards are distributed randomly in the sets which are intended to be given to the players. All sets contain at least one motherboard, an essential element to start building an acquisition platform, and the same number of starting botcoins. The play area is then set up. It is made up of several stands, one for each acquisition platform. Moreover there must be enough room between them to allow smooth movement.
The game begins with the briefing. Concretely, the game master explains that the objective of each player is to build one acquisition platform to achieve the final mission set by the rules while respecting constraints, which are also set by other rules. With all of the rules divided between the players, the game master explains that players have to haggle the exchanges and that there are three tests preceding the final mission. The game master then starts a stopwatch and the game begins.
A typical timeline for a game session is shown in
Figure 5. Each construction phase (game) must give the players time to exchange ideas, rules, elements and botcoins as well as to build their acquisition platform at their own pace. The first phase is more consistent to take into account the time needed at the start to discover the game elements and elaborate a starting strategy while the last phase is shorter because the platforms are almost complete at this stage. This shorter time is also used to raise the tension before the final mission (we even used to do a countdown to amplify the dramatic tension).
At each test slot, the game master freezes the game, brings the players together and then everyone goes from stand to stand. The player (or a representative of the team) of the current stand draws a card from the event deck and follows as indicated. Penalties or rewards are given before moving on to the next stand. When All of the stands have been visited, the game resumes (except for the players penalized in time).
A new round of negotiation/construction begins. All of the players have a little more experience because they have seen the other acquisition platforms and the different types of events that occurred. They can therefore better prepare for the next test.
Figure 6 shows pictures taken over several years of players participating in different sessions of our serious game.
The field mission is carried out the same way as the tests and ends the game. The profiles of the acquisition platforms built (see
Figure 7 are established using a spreadsheet. These profiles (see some examples at
Figure 8) are then compared to the minimalist standard profile (created by the game master) that can carry out the chosen mission to obtain the final scores.
The game master debriefs within 5 min by summarizing the technical and practical knowledge seen and harmonizing the experience of each participant.
If there is enough time, briefing using collaborative design thinking techniques is more effective to keep the students in an active process. The group of participants can be separated into three groups that deal with one of the following topics:
The different system elements of an acquisition platform—what are they used for and how do they depend on each other?
The constraints related to performing field tests and the important skills involved.
How a mission impacts the design of an acquisition platform and how to define these constraints.
Each group then presents their results to the others. In this more active format, the duration of the debriefing must be extended, but it should not exceed 20 min in total.
5. Results and Feedback
We created our serious game four years ago and have run over 10 sessions so far. This represents a total of hundreds of students divided into sessions of ten to fifty players who played either individually or in groups. The experience feedback that we present in this section is therefore based on these four years of experimentation.
It was assessed through quality surveys of participating students and success metrics derived from multiple choice quizzes. Both surveys and quizzes are conducted individually by the students just after a game session.
Our quality survey is mainly based on the assessment grid designed for serious games by [
79]. We used a total of 14 criteria: 13 detailed and the last one corresponding to the overall feeling about the experience (overall rating). The results of these quality surveys are summarized in
Table 1.
Regarding the quizzes, their results are synthesized in
Table 2 and are compared to the results obtained at the end of the previous traditional course. To have an overview of the impact of the serious game on the rest of the learning process, the synthesis of the quizzes carried out on the other course sessions on remote sensing is also provided (see
Table 3).
5.1. About the Feedback of the Participants
As we can see from
Table 1, the serious game was quite well received by students in general. All criteria ratings are in the highest quartile ([
3,
4]). Gameplay, usage satisfaction, and attention capture are at the top of the criteria and show that the captivating side of the serious game is successful (see
Table 4).
Still, from
Table 1 we can notice that the general impression is very unanimous (standard deviation
at 0.3), and noted higher than the score obtained when we average all of the criteria (
vs.
). It is a good thing because it is this overall positive impression that will remain throughout the rest of the courses, more than the details. The boosting role of the game is therefore also successful.
By analyzing
Table 5, we find the greatest disparities in responses on the evaluation of complexity and cognitive load. This corresponds to the difference felt when the game is played individually or as a team.
Finally, by comparing
Table 1 and the results of the quizzes, we notice a gap between the perception of the progression of learning by the students (experience richness and appropriateness) and their actual progression, which is higher than they think. This means that students learn without realizing it, which is a good thing (no much effort done), but this gap remains problematic because it is important that students actively perceive their gain in order to maximize the return on the experience. To remedy this point, we are thinking of having them take the assessment quiz the first time before starting the serious game. In this way, they will be able to easily measure the progress made in one session by taking the same quiz again at the end of the game.
5.2. About Choosing a Physical Game over a Digital Game
We made the conscious choice to create a serious game entirely on a physical media, and not on digital media, as is the case with many serious games in education. Indeed, we work with a population of students specializing in digital sciences and programming. They are familiar with dematerialized tools and data. Being literally with All of the cards in hand changes them from their usual working environment, which is one of the major levers for the effective application of a serious game [
80].
The players must discover the cards, sort them, and organize them in their playing areas. This first physical manipulation allows them to have a good overall vision of their game very quickly. Moreover the fact of spatially organizing the cards on the table helps them to better structure all of this information. We observed that the execution time of these first tasks is done at a rather slow pace and that players spontaneously keep this tempo for the next step where they define their first strategy.
The fact that they are approaching this phase of reflection by taking their time seems to us to be an excellent result with this digital native generation, which often tends to go (too) quickly in design and conception. On a computer, alone in front of the screen, they would tend to rush to the next steps by quickly skimming through the content and compulsively clicking on buttons. In the physical game, of course, they do not read all of the rule cards carefully enough, but this is compensated by the cooperative aspect during the game. Moreover the debriefing makes it possible to fix the last gaps at the end of the game.
Among the other positive aspects of a physical play, we can note that the exchanges are facilitated, because the human occupies a central place in the game. This is important for the game master who can suddenly choose to influence the course of the game depending on the behaviors observed. However this is also important for the other participants, because they can thus learn by mimicry. Moreover, it becomes easier for the students to draw the parallel with the physical commitment required when performing field tests.
5.3. About the Dynamics and Behaviors Encountered during the Game
Behavioral analysis of how a game unfolds is interesting, both individually and collectively. The game begins with a phase of individual work (i.e., no exchanges with other stands) and then continues with an increase in exchanges with others. Initially, the students try to figure out what they are supposed to do and find out what they have in their set. We observe that some organize the elements in a rigorous way, others much less. Some are quick in action while others stay longer in a phase of dubious waiting. This individual phase is done exclusively in their stand. Then one participant, or team of participants, ends up going to another stand: this removes the general inhibition and pushes everyone extremely quickly into the negotiation phase. Here again, different personalities emerge.
The phase necessary to appropriate the mechanics of the game as well as the various tests are also revealing of individual and collective capacities for analysis and adaptation. Our game takes the opposite of the classic mental scheme of traditional courses (where theoretical knowledge is delivered upstream before moving on to practice). Indeed, there is no a priori knowledge and therefore the players have to find the rules by themselves (mission or system ones), part of which is in their own hand and the rest is in the sets of All of the other players. Then they have to succeed in extracting from this mass of information only the ones that are essential for them to successfully complete the final mission. This feature is very suitable for the functioning of digital natives, but each individual approaches it in their own way.
Moreover, the game is not unbalanced by students who already have a previous experience in the field. Their knowledge allowes them to go a little faster than their classmates to build an acquisition platform, but without giving them a decisive advantage. Indeed, success in this game relies on many other skills than just the technical ones: exchange, negotiation, adaptation, improvisation, etc.
The testing phases, where students discover All of the other competing acquisition platforms, are also a source of review analysis of their own solution and create new exchanges. Thus, we see the strategies evolve. For example, after the first test, the students question their understanding of the mission if they see that All of the other platforms are submarines while they are building a aerial platform. They also seek to protect themselves from the events which could happen to them by acquiring spare parts especially if All of the participants encountered a lot of problems during this test. After the second or third test, and with the discovery of experience cards that make them immune to certain hazards, these spare parts become a new possibility of exchange to acquire new features for their acquisition platform.
Up until now, all of the games we have supervised have spontaneously been played in an open way: the students left their element card stocks visible, especially their rule cards. To date, the latter have not been used as bargaining chips. The players do not seek to impede the advance of their competitors: if they can help them without harming themselves, they are happy to do them a favor. We find that the spirit of players in our serious game is comparable to the spirit we encounter in field robotics competitions.
It has also been observed that other behaviors, more marginal and that do not happen in every game, can be propagated throughout the game when they are engaged. For example, some participants may simply copy competing solutions to reduce the reflection phase of their own solution (local version of industrial espionage). It was also observed in one game played in teams that theft was used to complete an acquisition platform. Since theft is not forbidden by the rules of the game, other groups have resorted to it which has resulted in a global adaptation of establishing sentries around the stands. During the debriefing phase, students spontaneously realized that, even if in the short term this strategy paid off although it was immoral, this was no longer the case in the medium term because of the mobilization of resources that could have been more useful elsewhere.
In general, we were positively surprised by the similarity between the methodology of real research in close-range remote sensing (importance of exchanges, reflection, feedback, the limitation of means and resources that can constrain to frugal innovation, etc.) and the methodology that is spontaneously developed by the students during these serious game sessions.
5.4. About the Efficiency on Domain Discovery and Learning Compared to Traditional Methods
To estimate the impact of the serious game on the expected skills, we compared the percentages of success obtained in the quizzes completed by the students at the end of the game sessions with those of the quizzes completed by the students of previous years, who followed the traditional version of the course.
In
Table 2, we grouped the answers into general themes to facilitate the interpretation of the results. The overall average percentage of success is better with the serious game than with the traditional course (gain of about 17%). Participants in the serious game obtain more than 88% of correct answers (71% for the traditional version). Moreover if we remove the worst results, then on average, more than 95% of participants obtain more than 90% of correct answers. This shows that the students come out of this session with a good overall vision of close-range remote sensing.
More in detail, the gain is spectacular on the themes “Close-range remote sensing acquisition platforms” (+23%) and “Field issues” (+32%). For the “Close-range remote sensing acquisition platforms” theme, as the students were led to strategically manipulate and associate the various system elements, this allows them to better understand and structure their technical knowledge. Concretely, after participating they have no idea how each element technically works, but they have a good understanding of what it does and how it interacts with others. For example, they are able to know that an inertial unit makes it possible to measure attitude (without knowing technically how). Moreover they understand that an inertial unit is an essential element if the acquisition platform uses dead reckoning navigation but that it becomes optional although still useful if the acquisition platform uses an alternative vision-based solution to estimate its relative position.
As for the “Field issues” theme, the culture acquired during the game on the types of mission and the types of environment allows the students to better understand the real constraints of field experimentations and their limits. This approach seems to be more concrete for them than if it had been approached from top down in classical lessons: they feel like they have lived it.
The results obtained on the other two themes (“Basics of close-range remote sensing” and “Basics of algorithm families”), which are less complex and therefore easier to acquire in a classic course, have nevertheless benefited from an improvement (+6% and +8%).
The Haggle mechanism, which invites participants to discover the rules of the game by themselves, has therefore been shown to be effective in understanding this new domain for the majority of our students. Moreover, since all of the rules are in play regardless of the chosen mission, students learn the constraints related to all environments and all associated acquisition platforms.
Thus, what used to take about three traditional class sessions now only needs one session, in the form of the serious game, reducing the overall time to get to real practice. This structured knowledge base makes it easier to stack skills throughout the rest of the learning process as students know how the concepts being addressed fit into the overall scheme. And the courses that follow in the meantime take advantage of the dynamism and enthusiasm generated by this experience to pass more easily.
Indeed, the results of the quizzes carried out on the following course sessions on remote sensing (see
Table 3) show that the serious game has a positive impact on the success in the following courses (average overall gain of around 5%) and particularly on themes such as “Basics of space and aerial remote sensing” (+9%) and “Close-range remote sensing legislation” (+5%). The result on this last theme is easily explained, because the serious game simulates an operational situation: the legislation is then introduced as the imperative rules to be followed in the real world.
For the other theme “Basics of space and aerial remote sensing”, the causal link is more subtle. The difficulties encountered by the students in this theme relates mainly to space trajectography, which seems very theoretical to them: they find that notions such as polar, geostationary or heliosynchronous orbits are too close to pure physics lessons. However, the serious game allows us to facilitate their introduction. For example, during the haggle, students discover the need to know the attitude of an acquisition platform. In the following courses, we can detail the technologies used by inertial sensors in the aerial and spatial fields with the inertial wheel. After a physical experiment with a real bicycle wheel to make them feel the conservation of the angular moment, the generalization to the orbits of satellites is easy, concrete and better understood by students. This example can be generalized to other parts of the course.
To summarize, the first experience offered by the serious game can serve as a common thread to build bridges towards more theoretical notions throughout the learning process.
5.5. About the Other Interests and Applications of Our Serious Game
We had the opportunity to test the game by mixing engineering students with middle school students. The final result that the latter obtained is quite comparable to those of their elders, despite the great difference in scientific background. The only adjustment made was to give them a little more information on the mechanics of the game in the form of a very light roadmap: step 1, find all of the rules describing the mission; step 2, find the system rules that explain what the acquisition platform you need to build for the mission should be made of; step 3 find the elements to build the acquisition platform. With these hints, they quickly gained confidence.
In the end, we found that once reassured, the difference in scientific knowledge was not a real handicap, as their motivation to succeed was greater than the other students, who were also very benevolent towards them. The number of games played in this way does not provide a sufficient statistical sample to draw a general conclusion, but this is a result that we believe very interesting to indicate, in particular for building bridges between generations and creating vocations.
In addition to its teaching value, we use the serious game as a situation test for recruitments. These recruitments concern students who wish to join our team to participate in undergraduate research activities. This time, the group size being smaller, each participant can play individually. We are therefore particularly attentive to the individual as well as the collective behavioral qualities of the candidates, including the most timid ones who are then forced to exchange with the others.
This test being the last stage of our recruitment, it also acts as a team building event, whether it is between students of the same year or with students of the team from the upper years who have been invited to play in the same session. Moreover indeed, it quickly “fluidifies” the working relations between the candidates retained thereafter.
6. Conclusions
The issues that are the starting point of this work can be summarized by these two questions:
How to increase the mastery of fundamental skills in close-range remote sensing by our digital native students?
How to shorten the time required to obtain these results in order to allow them to move on to concrete practice on real systems?
In this article, we detailed the original solution based on a serious game that we implemented. We were inspired by the game of Haggle, which we modified and adapted to create a serious game specific to the teaching of close-range remote sensing. We explained in detail how we designed it and for which educational purposes, its original and specific game mechanics, as well as how a session unfolds.
We have been using this serious game for four years as a booster for our remote sensing courses as well as a tool for recruiting promising students for undergraduate research activities. Each game session brings together 10 to 50 students, without any prior knowledge of the field, participating individually or as a team.
Systematic surveys carried out at the end of each session have shown that the students were generally very satisfied with the serious game (overall rating of 3.9/4 and average rating of the evaluation criteria of 3.5/4).
They also confirmed the interest of the game to offer students a good global vision of the field. Indeed, more than 95% of the students demonstrated a good overall understanding of the system architectures of acquisition platforms and of field constraints and issues.
The surveys also show that the serious game has a positive impact on the rest of the learning process, during following courses on remote sensing, because it made it possible to better structure knowledge in the overall scheme.
This active introduction to remote sensing thus shortens the teaching time of theoretical notions that will be necessary to grasp before moving on to real practice by replacing three sessions of traditional lessons by a single one in a form of a serious game with an increase in mastering fundamental skills.
Finally, we can evoke two main perspectives to develop this Haggle game. The first relates to the organization part and concerns the simplification of the calculation of the final scores. This task is, for the time being, quite complex and therefore takes a lot of time. It is currently done in the form of a spreadsheet that we fill in with the help of photos taken from the platforms built. It would be interesting to explore the use of a vision-based tool (direct or with QR codes) for an automatic analysis via the image or more simply by a form allowing each participant to fill in the characteristics of their final robot.
The second perspective concerns the strengthening of the link with the other fields of remote sensing (spatial and aerial). We plan to add cards (systems and rules) on planes and satellites allowing access to data from these vectors to complement the data collected by the close-range remote sensing platform built.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 Most Popular Criteria
Most Popular Criteria