
Research of Deformation and Soil Moisture in Loess Landslide Simultaneous Retrieved with Ground-Based GNSS
 , ,
, ,
Abstract
:
1. Introduction
2. Basic Method
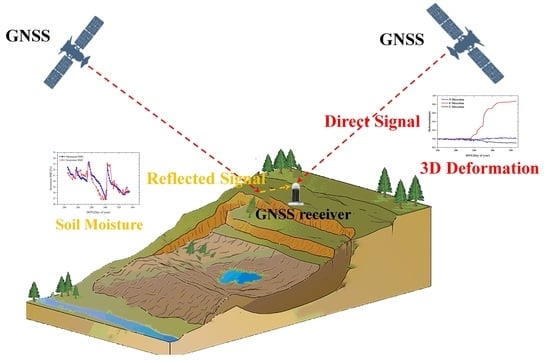
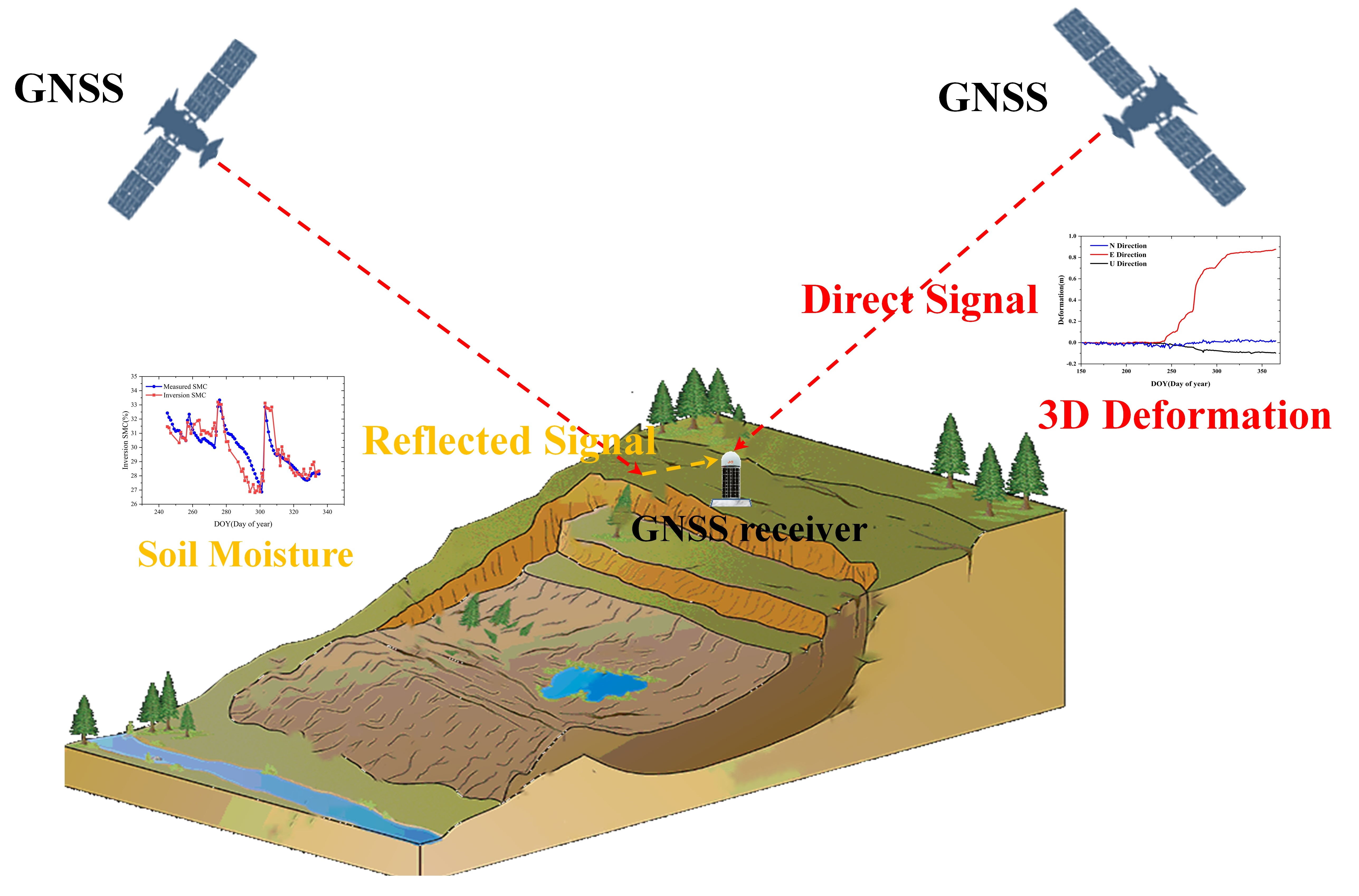
2.1. General Research Rdeas
2.2. Basic Principles of GNSS Interpretation of Landslide 3D Deformation
2.3. Basic Principles of GNSS Interpretation of Soil Moisture Content
3. Linxia Loess Landslide Case Analysis
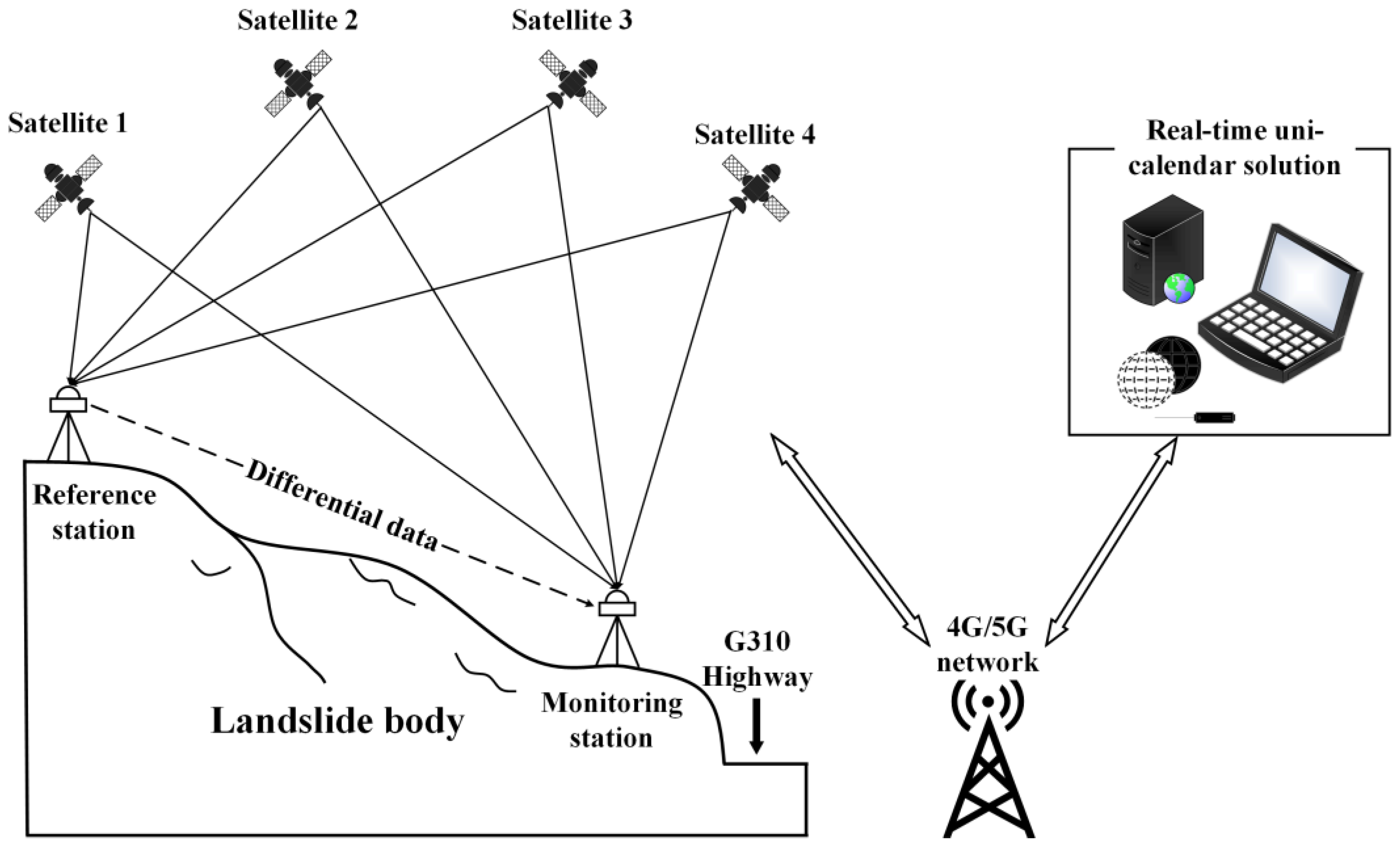
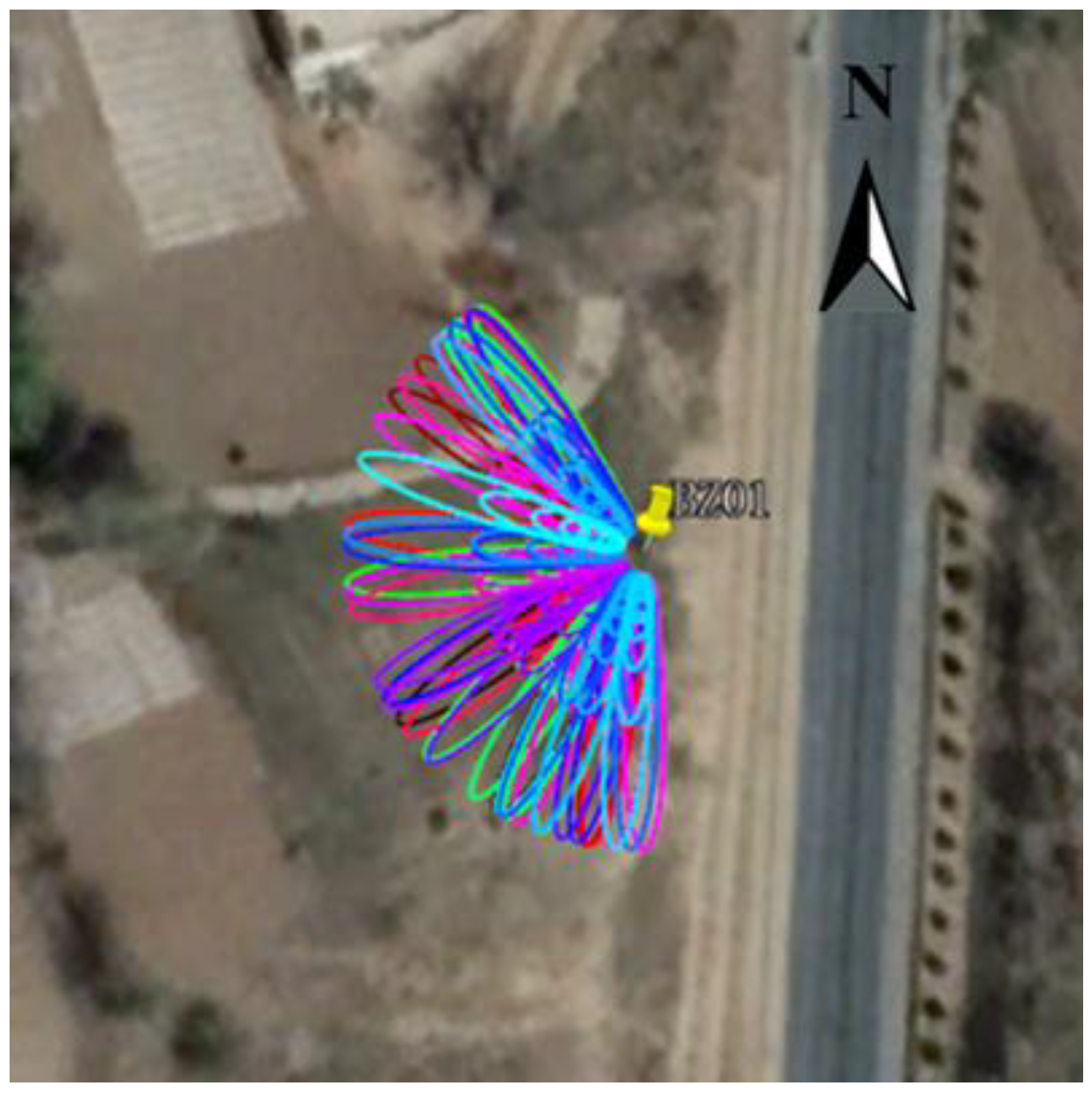
3.1. Experimental Area and Data Source
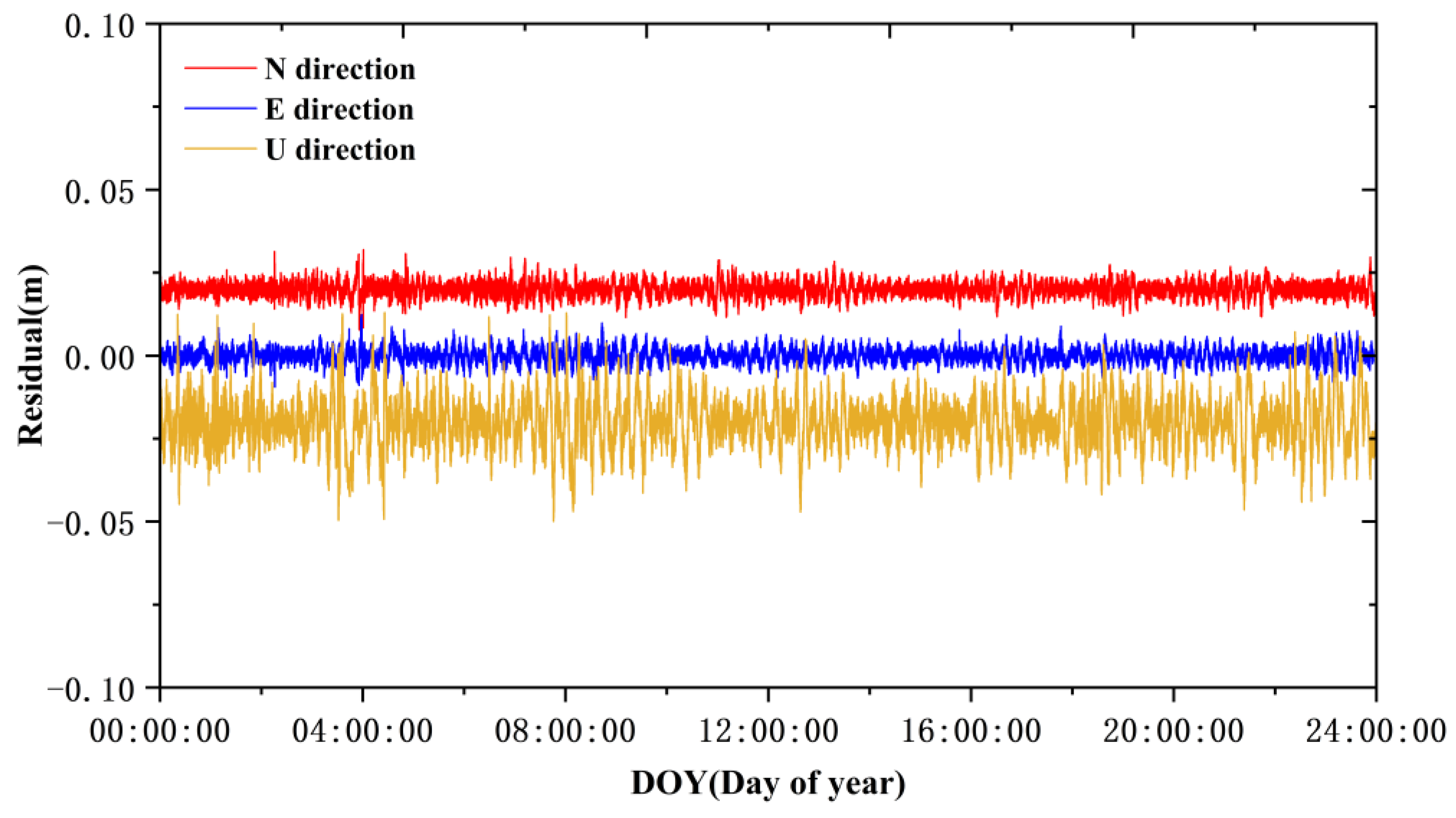
3.2. GNSS Interpretation of Loess Landslide Deformation
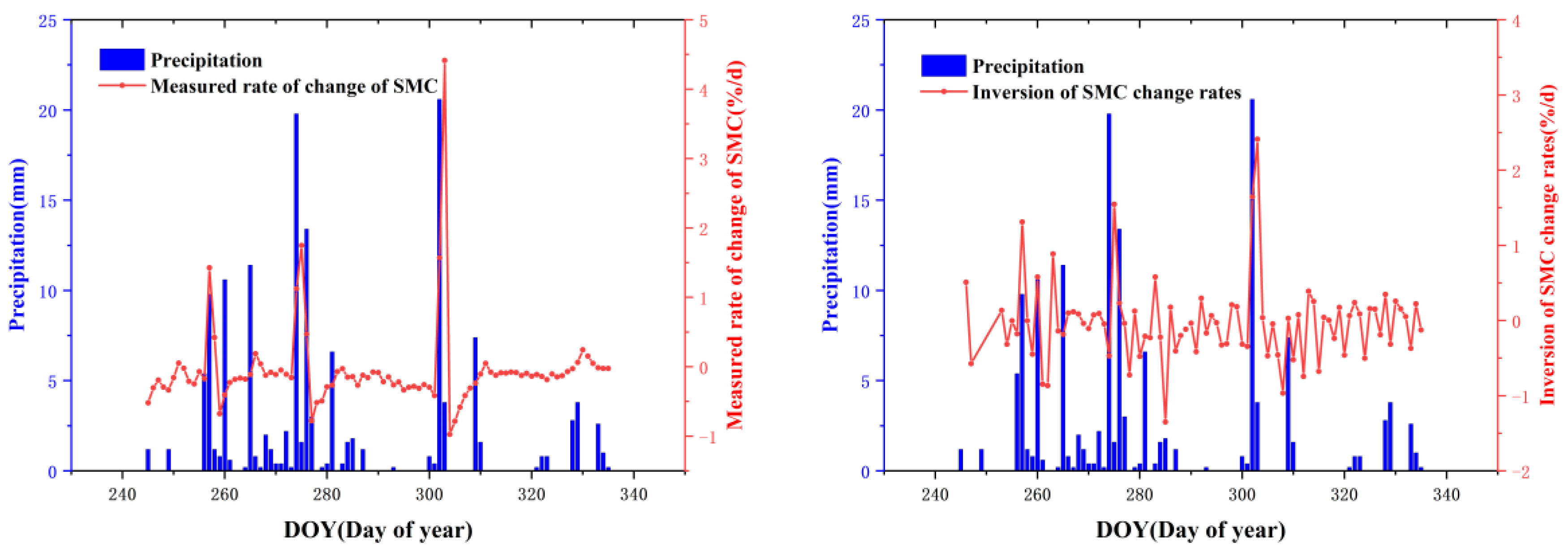
3.3. GNSS Interpretation of Soil Moisture on Loess Landslides
3.4. Interpretation of Loess Landslide Soil Moisture Response Analysis to Deformation
4. Discussion
5. Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Highland, L. Landslide Types and Processes; U.S. Geological Survey: Reston, VA, USA, 2004. [Google Scholar]
- Zhang, Q.; Hang, G.; Yang, C. Precision space observation technique for geological hazard monitoring and early warning. Acta Geodaet. Cartogr. Sin. 2017, 46, 1300. [Google Scholar]
- Bogaard, T.A.; Greco, R. Landslide hydrology: From hydrology to pore pressure: Wiley Interdisciplinary Reviews. Water 2016, 3, 439–459. [Google Scholar]
- Zhang, F.; Chen, W.; Liu, G.; Liang, S.; Kang, C.; He, F. Relationships between landslide types and topographic attributes in a loess catchment, China. J. Mount. Sci. 2012, 9, 742–751. [Google Scholar] [CrossRef]
- Bai, X.; Sang, L.; Bai, G.; Kang, H.; Liu, Z. Research Progress in Loess Landslides Forecast and Prediction Based on Assimilating Multi-Source Information. IOP Conf. Ser. Earth Environ. Sci. 2019, 310, 052045. [Google Scholar] [CrossRef]
- Wang, J.J.; Liang, Y.; Zhang, H.P.; Wu, Y.; Lin, X. A loess landslide induced by excavation and rainfall. Landslides 2014, 11, 141–152. [Google Scholar] [CrossRef]
- Zhuang, J.; Peng, J.; Wang, G.; Javed, I.; Wang, Y.; Li, W. Distribution and characteristics of landslide in Loess Plateau: A case study in Shaanxi province. Eng. Geol. 2018, 236, 89–96. [Google Scholar] [CrossRef]
- Calcaterra, S.; Cesi, C.; Di Maio, C.; Gambino, P.; Merli, K.; Vallario, M.; Vassallo, R. Surface displacements of two landslides evaluated by GPS and inclinometer systems: A case study in Southern Apennines, Italy. Nat. Hazards 2012, 61, 257–266. [Google Scholar] [CrossRef]
- Wang, L. A study on key technology of high precision gps monitoring for geological hazard. Acta Geodaet. Cartogr. Sin. 2015, 44, 826. [Google Scholar]
- Bai, Z.; Zhang, Q.; Huang, G.; Jing, C.; Wang, J. Real-time BeiDou landslide monitoring technology of “light terminal plus industry cloud”. Acta Geodaet. Cartogr. Sin. 2019, 48, 1424. [Google Scholar]
- Lumb, P. Slope failures in Hong Kong. Q. J. Eng. Geol. 1975, 8, 31–65. [Google Scholar] [CrossRef]
- Lehmann, P.; Gambazzi, F.; Suski, B.; Baron, L.; Askarinejad, A.; Springman, S.M.; Holliger, K.; Or, D. Evolution of soil wetting patterns preceding a hydrologically induced landslide inferred from electrical resistivity survey and point measurements of volumetric water content and pore water pressure. Water Resour. Res. 2013, 49, 7992–8004. [Google Scholar] [CrossRef]
- Zhang, M.; Jie, L. Controlling factors of loess landslides in western China. Environ. Earth Sci. 2010, 59, 1671–1680. [Google Scholar] [CrossRef]
- Qiu, C.; Su, L.; Zou, Q.; Geng, X. A hybrid machine-learning model to map glacier-related debris flow susceptibility along Gyirong Zangbo watershed under the changing climate. Sci. Total Environ. 2022, 818, 151752. [Google Scholar] [CrossRef]
- Brand, E.W. Some thoughts on rain-induced slope failures. In Proceedings of the 10th International Conference on Soil Mechanics and Foundation Engineering, Stocholm, Sweden, 15–19 June 1981; A.A. Balkema: Roterdam, The Netherlands, 1981; Volume 3, pp. 373–376. [Google Scholar]
- Anderson, S.A.; Sitar, N. Analysis of rainfall-induced debris flows. J. Geotech. Eng. 1995, 121, 544–552. [Google Scholar] [CrossRef]
- Gens, A. Soil–environment interactions in geotechnical engineering. Géotechnique 2010, 60, 3–74. [Google Scholar] [CrossRef]
- Xu, L.; Dai, F.C.; Tu, X.B.; Javed, I.; Woodard, M.J.; Jin, Y.L.; Tham, L.G. Occurrence of landsliding on slopes where flowsliding had previously occurred: An investigation in a loess platform, North-west China. Catena 2013, 104, 195–209. [Google Scholar] [CrossRef]
- Sorbino, G.; Nicotera, M.V. Unsaturated soil mechanics in rainfall-induced flow landslides. Eng. Geol. 2013, 165, 105–132. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of GPS receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35, L24405. [Google Scholar] [CrossRef] [Green Version]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Effects of near-surface soil moisture on GPS SNR data: Development of a retrieval algorithm for soil moisture. IEEE Trans. Geosci. Remote Sens. 2013, 52, 537–543. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M. An Algorithm for Soil Moisture Estimation Using GPS-Interferometric Reflectometry for Bare and Vegetated Soil. GPS Solut. 2016, 20, 525–537. [Google Scholar] [CrossRef]
- Vey, S.; Güntner, A.; Wickert, J.; Blumek, T.; Ramatschi, M. Long-term soil moisture dynamics derived from GNSS interferometric reflectometry: A case study for Sutherland, South Africa. GPS Solut. 2016, 20, 641–654. [Google Scholar] [CrossRef]
- Yang, T.; Wan, W.; Chen, X.; Chu, T.; Hong, Y. Using BDS SNR observations to measure near-surface soil moisture fluctuations: Results from low vegetated surface. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1308–1312. [Google Scholar] [CrossRef]
- Shi, Y.; Ren, C.; Yan, Z.; Lai, J. High Spatial-Temporal Resolution Estimation of Ground-Based Global Navigation Satellite System Interferometric Reflectometry (GNSS-IR) Soil Moisture Using the Genetic Algorithm Back Propagation (GA-BP) Neural Network. ISPRS Int. J. Geo-Inform. 2021, 10, 623. [Google Scholar] [CrossRef]
- Larson, K.M.; Nievinski, F.G. GPS snow sensing: Results from the EarthScope Plate Boundary Observatory. GPS Solut. 2013, 17, 41–52. [Google Scholar] [CrossRef]
- Ran, Q.; Zhang, B.; Yao, Y.; Yan, X.; Li, J. Editing arcs to improve the capacity of GNSS-IR for soil moisture retrieval in undulating terrains. GPS Solut. 2022, 26, 1–11. [Google Scholar] [CrossRef]
- Nie, S.; Wang, Y.; Tu, J.; Li, P.; Xu, J.; Li, N.; Wang, M.; Huang, D.; Song, J. Retrieval of Soil Moisture Content Based on Multisatellite Dual-Frequency Combination Multipath Errors. Remote Sens. 2022, 14, 3193. [Google Scholar] [CrossRef]
- Chen, R.; Wang, L.; Li, D.; Chen, L.; Wenju, F. A survey on the fusion of the navigation and the remote sensing techniques. Acta Geodaet. Cartogr. Sin. 2019, 48, 1507. [Google Scholar]
- Yu, K.; Han, S.; Bu, J.; An, Y.; Zhoud, Z.; Wang, C.; Tabibi, S.; Wayn Cheong, J. Spaceborne GNSS Reflectometry. Remote Sens. 2022, 14, 1605. [Google Scholar] [CrossRef]
- Jin, S.; Feng, G.P.; Gleason, S. Remote sensing using GNSS signals: Current status and future directions. Adv. Space Res. 2011, 47, 1645–1653. [Google Scholar] [CrossRef]
- Jiang, W.; Jiao, Q.; Luo, Y.; Li, Y.; Li, Q.; Li, B. Risk investigation of landslide hazard and disaster emergency based on multi-platforms remote sensing techniques. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Virtual Symposium, 26 September–2 October 2020; pp. 5211–5214. [Google Scholar]
- Lissak, C.; Bartsch, A.; De Michele, M.; Gomez, C.; Maquaire, O.; Raucoules, D.; Roulland, T. Remote sensing for assessing landslides and associated hazards. Surv. Geophys. 2020, 41, 1391–1435. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Qiang, X.; Xing, Z.; Weile, L.; Xiujun, D.; Karen, D.; Yanan, J.; Huiyan, L.; Chen, G. Technical progress of space-air-ground collaborative monitoring of landslide. Acta Geodaet. Cartogr. Sin. 2022, 51, 1416–1436. [Google Scholar]
- Xu, X.; Shang, M.; Deng, Y.H. Analysis about the classification of Landslide Monitoring Method. Appl. Mech. Mater. 2014, 638, 360–364. [Google Scholar] [CrossRef]
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Carlà, T.; Tofani, V.; Lombardi, L.; Raspini, F.; Bianchini, S.; Bertolo, D.; Thuegaz, P.; Casagli, N. Combination of GNSS, satellite InSAR, and GBInSAR remote sensing monitoring to improve the understanding of a large landslide in high alpine environment. Geomorphology 2019, 335, 62–75. [Google Scholar] [CrossRef]
- Yongqi, C.; Lutes, J. Development of the Methodology for Single Epoch GPS Deformation Monitoring. Geomat. Inform. Sci. Wuhan Univ. 1998, 23, 324–328,363. [Google Scholar]
- Soto, J.; Galve, J.P.; Palenzuela, J.A.; Azañón, J.M.; Tamay, J.; Irigaray, C. A multi-method approach for the characterization of landslides in an intramontane basin in the Andes (Loja, Ecuador). Landslides 2017, 14, 1929–1947. [Google Scholar] [CrossRef]
- Uhlemann, S.; Chambers, J.; Wilkinson, P.; Maurer, H.; Merritt, A.; Meldrum, P.; Kuras, O.; Gunn, D.; Smith, S.; Dijkstra, R. Four-dimensional imaging of moisture dynamics during landslide reactivation. J. Geophys. Res. Earth Surf. 2017, 122, 398–418. [Google Scholar] [CrossRef] [Green Version]
- Bourdeau, C.; Lenti, L.; Martino, S.; Oguz, O.; Yalcinkaya, E.; Bigarrè, P.; Coccia, S. Comprehensive analysis of the local seismic response in the complex Büyükçekmece landslide area (Turkey) by engineering-geological and numerical modelling. Eng. Geol. 2017, 218, 90–106. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G.; Giorgi, G.; Buist, P.J. Testing of a new single-frequency GNSS carrier phase attitude determination method: Land, ship and aircraft experiments. GPS Solut. 2010, 15, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Bilich, A.; Larson, K.M. Mapping the GPS multipath environment using the signal-to-noise ratio (SNR). Radio Sci. 2007, 42, 1–16. [Google Scholar] [CrossRef]
- Zhang, S.; Roussel, N.; Boniface, K.; Ha, M.C.; Frappart, F.; Darrozes, J.; Baup, F.; Calvet, J.-C. Use of reflected GNSS SNR data to retrieve either soil moisture or vegetation height from a wheat crop. Hydrol. Earth Syst. Sci. 2017, 21, 4767–4784. [Google Scholar] [CrossRef]
- Kaplan, E.; Hegarty, C.J. Understanding GPS/GNSS: Principles and Applications; Artech House: New York, NY, USA, 2017. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | E | U | |
|---|---|---|---|
| GAMIT | 1.6 | 1.7 | 4.8 |
| TrackRT | 2.2 | 2.1 | 7.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Zhang, S.; Zhang, Q.; Liu, Q.; Ma, Z.; Wang, T.; Tian, J.; Li, X. Research of Deformation and Soil Moisture in Loess Landslide Simultaneous Retrieved with Ground-Based GNSS. Remote Sens. 2022, 14, 5687. https://doi.org/10.3390/rs14225687
Zhou X, Zhang S, Zhang Q, Liu Q, Ma Z, Wang T, Tian J, Li X. Research of Deformation and Soil Moisture in Loess Landslide Simultaneous Retrieved with Ground-Based GNSS. Remote Sensing. 2022; 14(22):5687. https://doi.org/10.3390/rs14225687
Chicago/Turabian StyleZhou, Xin, Shuangcheng Zhang, Qin Zhang, Qi Liu, Zhongmin Ma, Tao Wang, Jing Tian, and Xinrui Li. 2022. "Research of Deformation and Soil Moisture in Loess Landslide Simultaneous Retrieved with Ground-Based GNSS" Remote Sensing 14, no. 22: 5687. https://doi.org/10.3390/rs14225687