
Applicability Assessment of Coherent Doppler Wind LiDAR for Monitoring during Dusty Weather at the Northern Edge of the Tibetan Plateau
 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data and Information
2.2. Research Methods
2.2.1. DBS Wind Field Inversion Method for CDWL
2.2.2. PBLH Inversion Method for CDWL and GTS Soundings
2.2.3. The k-Means Clustering Analysis
3. Comparison of Wind Field Observations
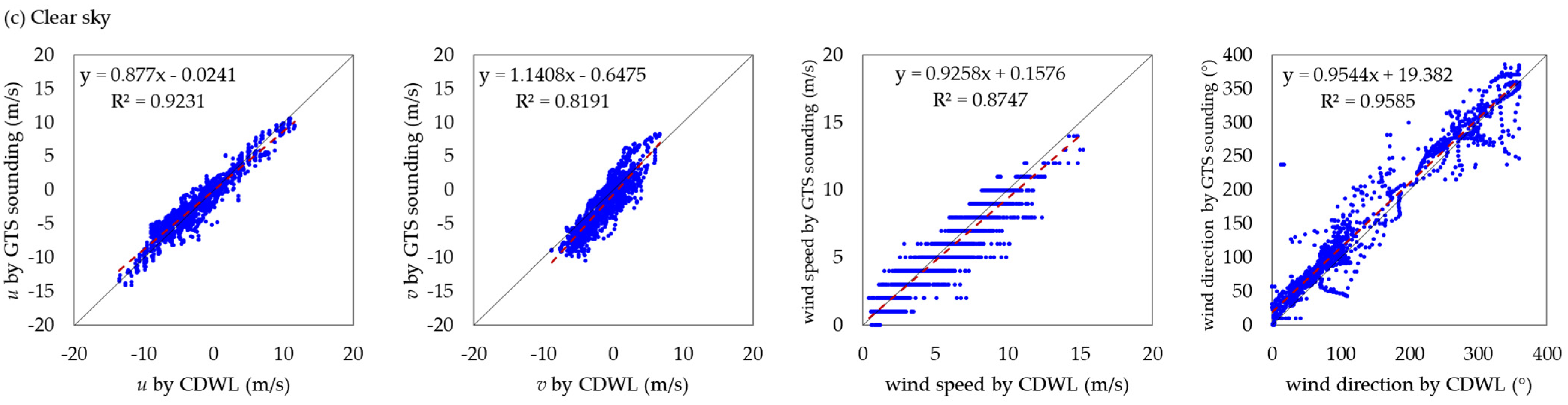
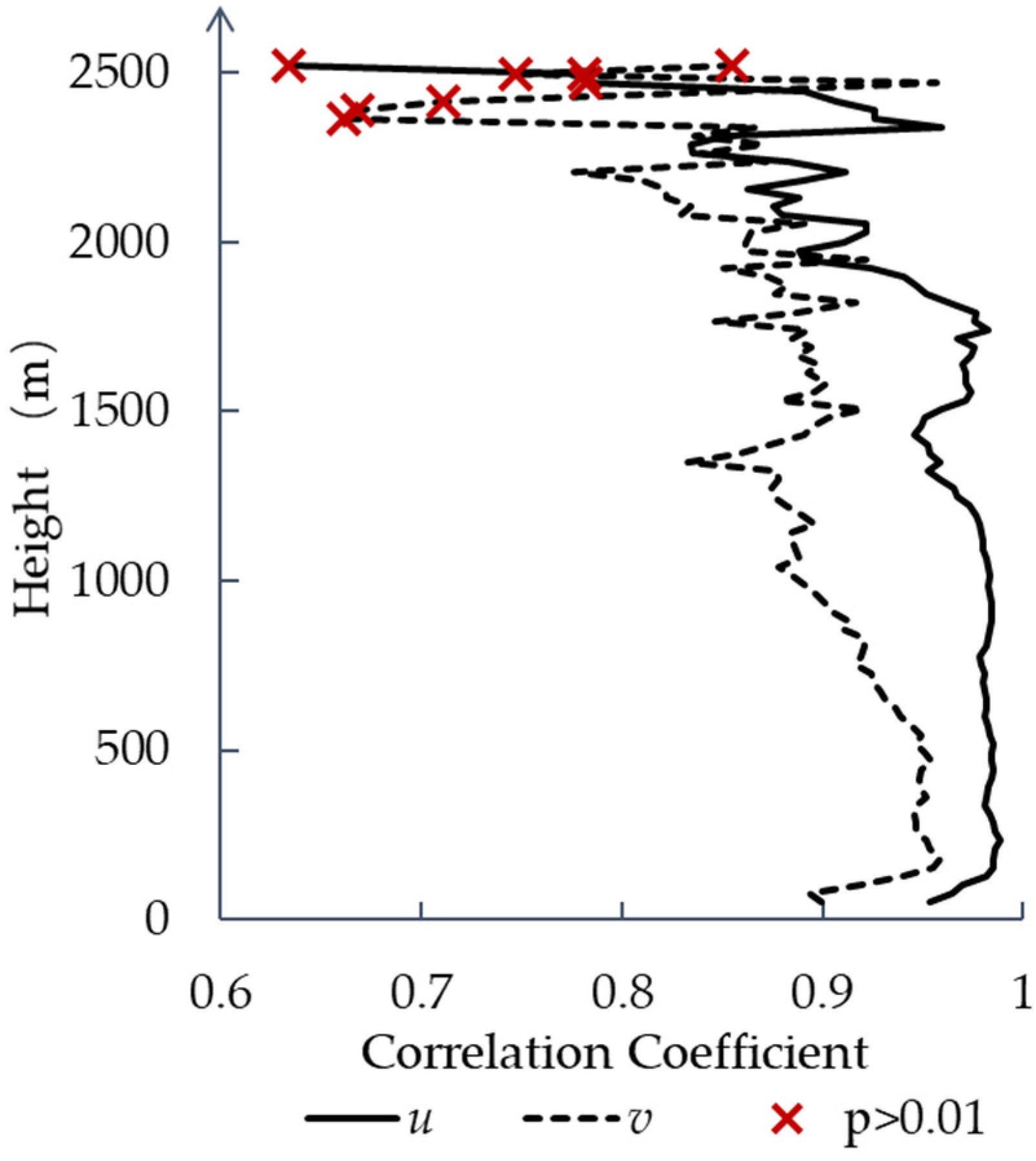
3.1. CDWL and GTS Soundings’ Observation Wind Field Assessment
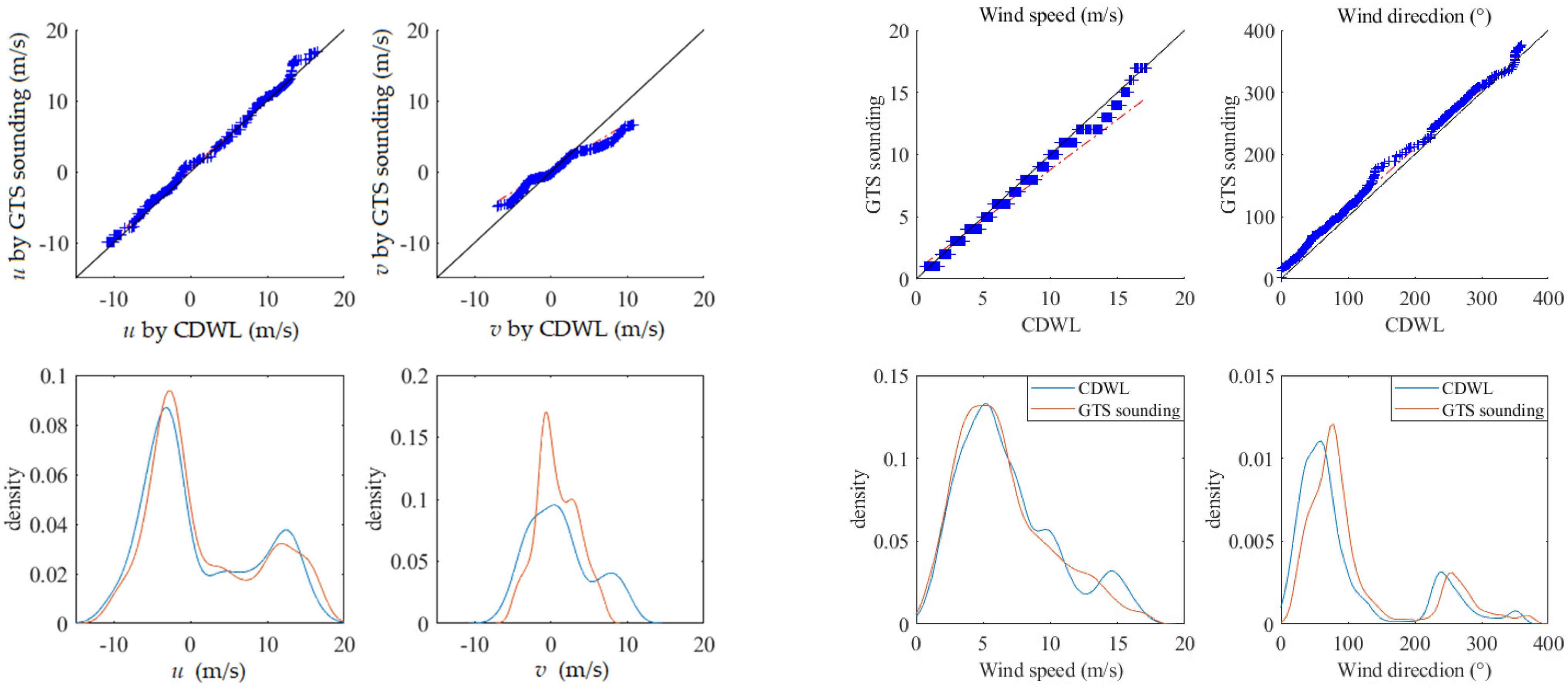
3.2. Quantile Distribution and Probability Density Analysis of Horizontal Wind Fields from CDWL and GTS Sounding Observations
4. Evaluation of PBLH Inversion Results
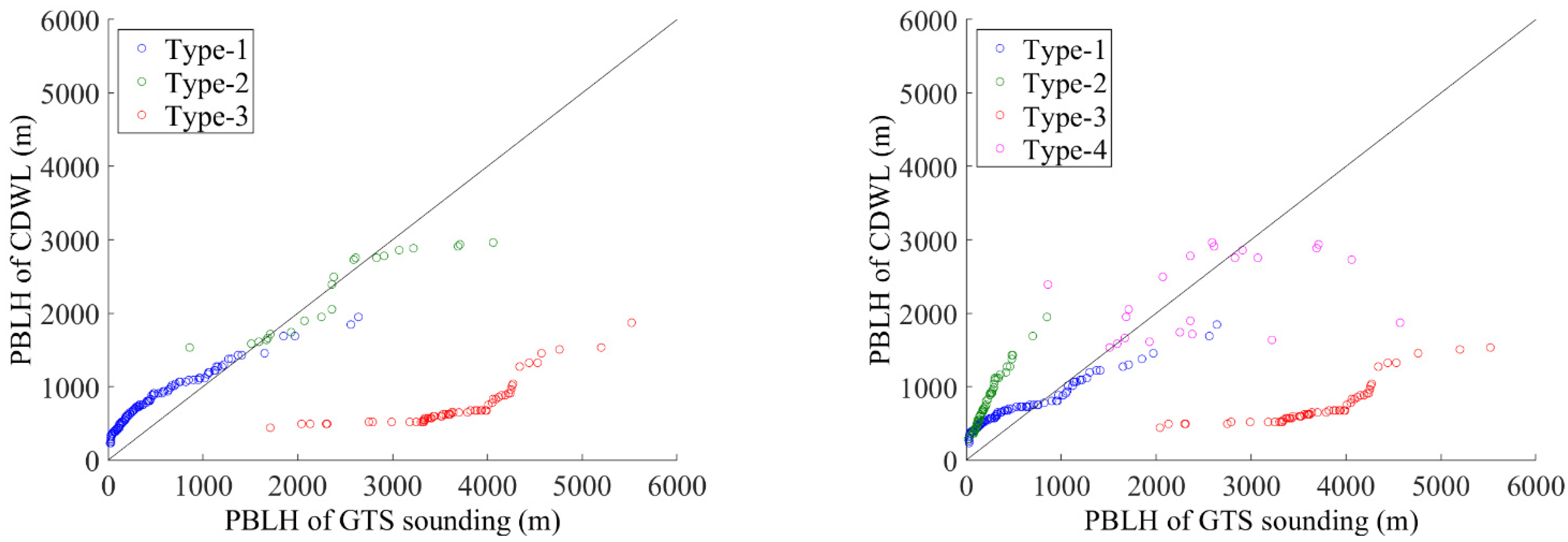
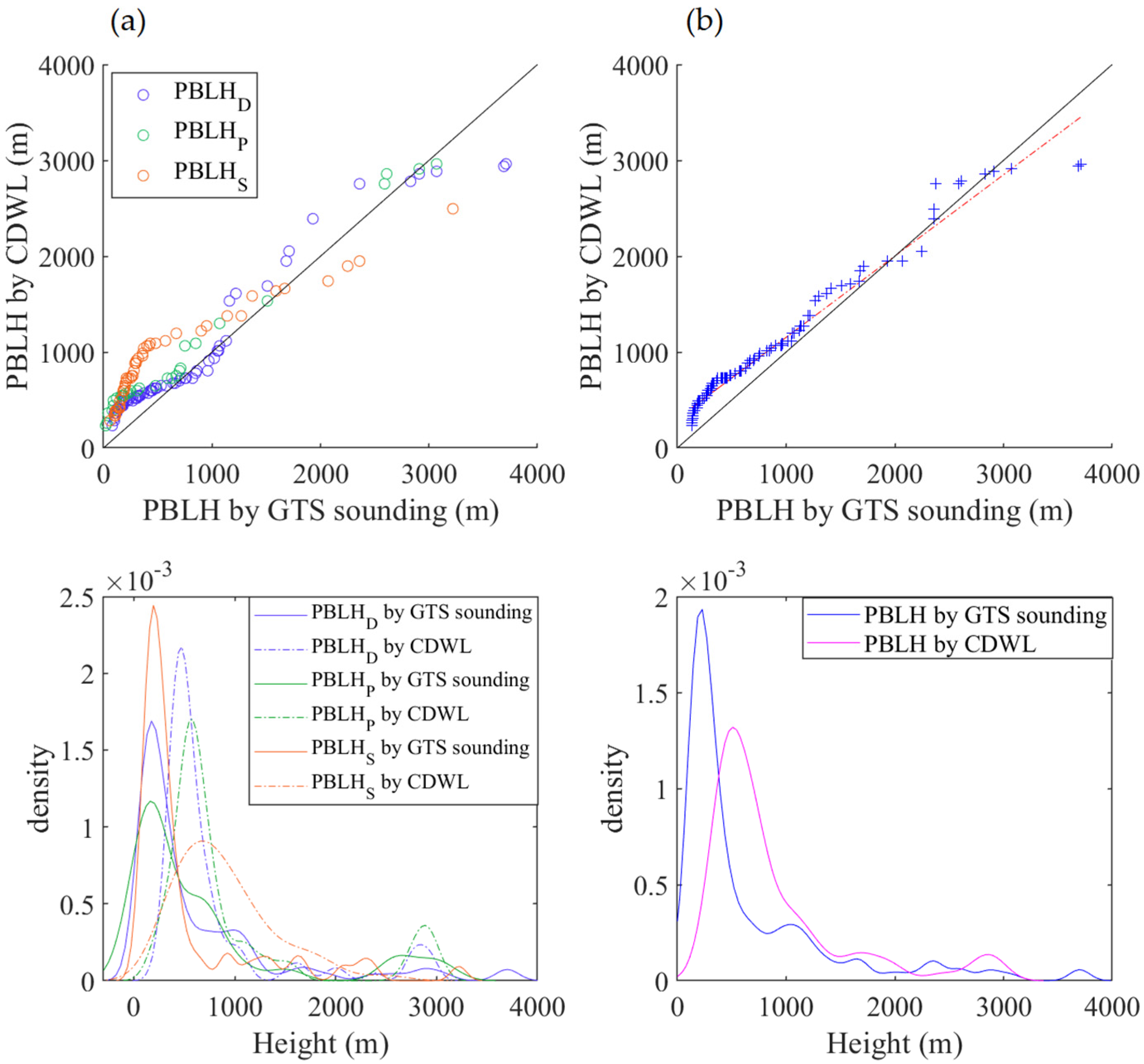
4.1. Analysis of PBLH Clustering Results
4.2. Evaluation of PBLH Inversion Results
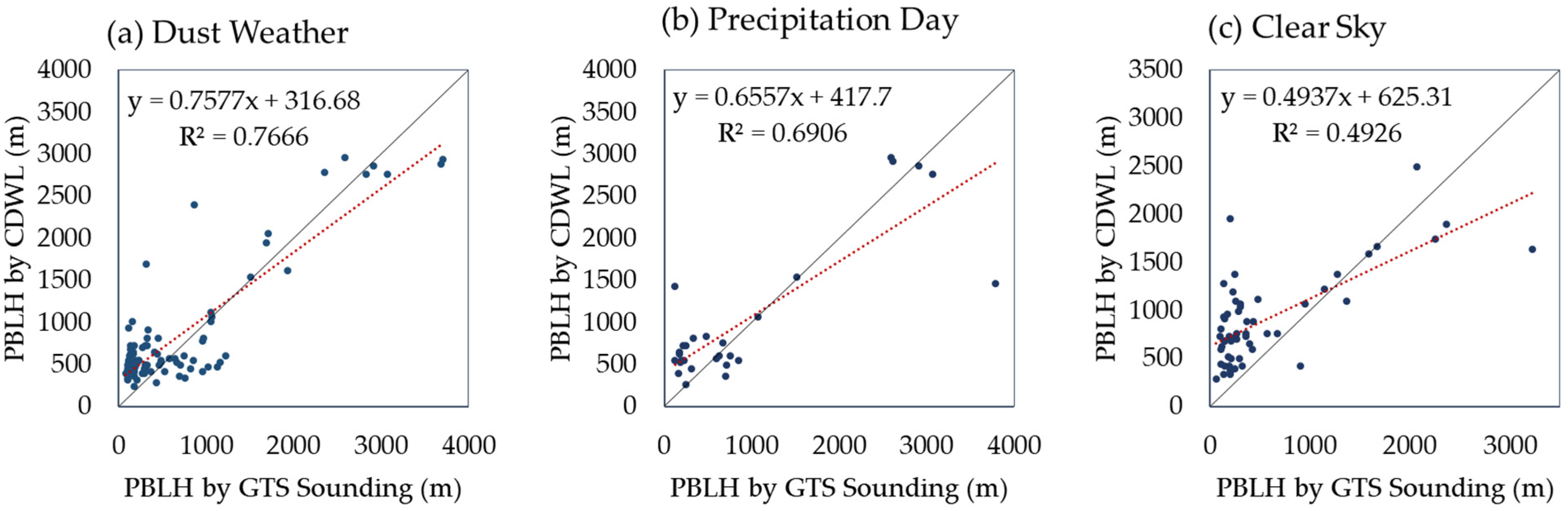
4.2.1. Evaluation of PBLH Inversion Results for Different Weather Types
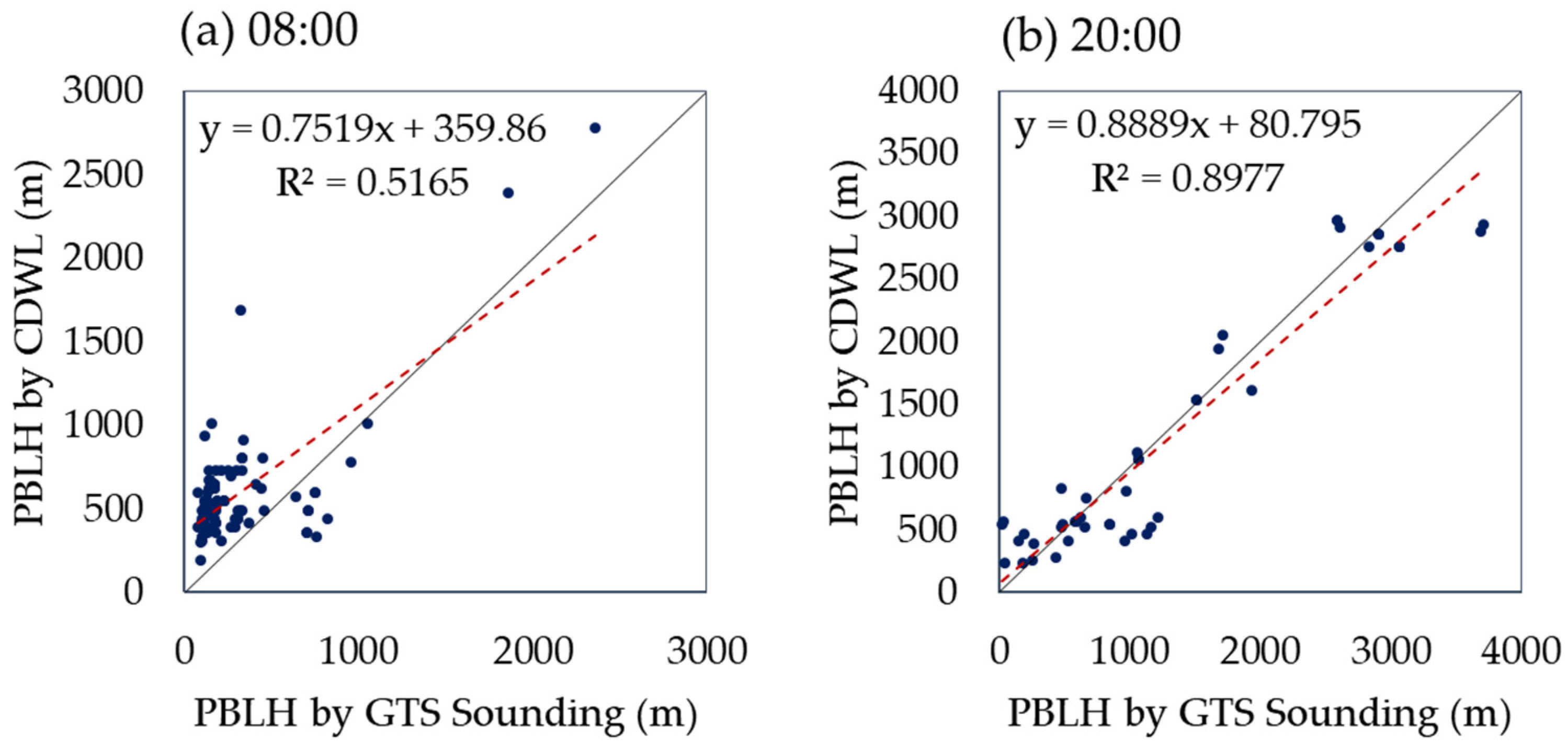
4.2.2. Evaluation of PBLH Inversion Results for Different Observation Times during Dusty and Precipitation Days
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qian, W.; Quan, L.; Shi, S. Variations of the Dust Storm in China and its Climatic Control. J. Clim. 2002, 10, 1216–1229. [Google Scholar] [CrossRef]
- Adams, J.W.; Rodriguez, D.; Cox, R.A. The uptake of SO2 on Saharan dust: A flow tube study. Atmos. Chem. Phys. Discuss. 2005, 5, 2679–2689. [Google Scholar] [CrossRef] [Green Version]
- Brunekreef, B.; Forsberg, B. Epidemiological evidence of effects of coarse airborne particles on health. Eur. Respir. J. 2005, 26, 309–318. [Google Scholar] [CrossRef]
- Zakey, A.S.; Solmon, F.; Giorgi, F. Development and testing of a desert dust module in a regional climate model. Atmos. Chem. Phys. 2006, 6, 4687–4704. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhuang, G.; Tang, A.; Zhang, W.; Sun, Y.; Wang, Z.; An, Z. The evolution of chemical components of aerosols at five monitoring sites of China during dust storms. Atmos. Environ. 2007, 41, 1091–1106. [Google Scholar] [CrossRef]
- Du, W.; Xin, J.; Wang, M.; Gao, Q.; Wang, Y. Photometric measurements of spring aerosol optical properties in dust and non-dust periods in China. Atmos. Environ. 2011, 42, 7981–7987. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Jiao, M.Y.; Bi, B.G.; Zhao, L.N.; Gao, Q.X.; Guo, J.H.; Ren, Z.H. Analysis of the Heavy Polluting Effects of Sand Dust Weather in Beijing. Res. Environ. Sci. 2009, 22, 309–314. [Google Scholar] [CrossRef]
- Dai, L.; Xin, J.; Zuo, H.; Ma, Y.; Zhang, L.; Wu, X.; Ma, Y.; Jia, D.; Wu, F. Multilevel Validation of Doppler Wind Lidar by the 325 m Meteorological Tower in the Planetary Boundary Layer of Beijing. Atmosphere 2020, 11, 1051. [Google Scholar] [CrossRef]
- Zhai, X.; Wu, S.; Liu, B. Doppler lidar investigation of wind turbine wake characteristics and atmospheric turbulence under different surface roughness. Opt. Express 2017, 25, A515–A529. [Google Scholar] [CrossRef] [PubMed]
- Jiang, P.; Yuan, J.; Wu, K.; Wang, L.; Xia, H. Turbulence Detection in the Atmospheric Boundary Layer Using Coherent Doppler Wind Lidar and Microwave Radiometer. Remote Sens. 2022, 14, 2951. [Google Scholar] [CrossRef]
- Dai, G.; Wu, S.; Song, X.; Liu, L. Optical and Geometrical Properties of Cirrus Clouds over the Tibetan Plateau Measured by LiDAR and Radiosonde Soundings during the Summertime in 2014. Remote Sens. 2019, 11, 302. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zheng, Y.; Tan, W.; Guo, P.; Xu, Q.; Chen, S.; Lin, R.; Chen, S.; Chen, H. Two Practical Methods to Retrieve Aerosol Optical Properties from Coherent Doppler Lidar. Remote Sens. 2022, 14, 2700. [Google Scholar] [CrossRef]
- Chen, W.; Kuze, H.; Uchiyama, A.; Suzuki, Y.; Takeuchi, N. One-year observation of urban mixed layer characteristics at Tsukuba, Japan using a micro pulse lidar. Atmos. Environ. 2001, 35, 4273–4280. [Google Scholar] [CrossRef]
- Wang, C.; Jia, M.; Xia, H.; Wu, Y.; Wei, T.; Shang, X.; Yang, C.; Xue, X.; Dou, X. Relationship analysis of PM2.5 and boundary layer height using an aerosol and turbulence detection lidar. Atmos. Meas. Tech. 2019, 12, 3303–3315. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.W.; Yoon, S.C.; Kim, J.; Kang, J.Y.; Sugimoto, N. Asian dust event observed in seoul, korea, during 29-31 may 2008: Analysis of transport and vertical distribution of dust particles from lidar and surface measurements. Sci. Total Environ. 2010, 408, 1707–1718. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Qi, F.D.; Jin, C.J.; Yue, G.M.; Zhou, J. Polarization Lidar Observations of Cirrus Clouds and Asian Dust Aerosols over Hefei. Chin. J. Atmos. Sci. 2003, 6, 1093–1100. [Google Scholar] [CrossRef]
- Xie, C.; Nishizawa, T.; Sugimoto, N.; Matsui, I.; Wang, Z. Characteristics of aerosol optical properties in pollution and Asian dust episodes over Beijing, China. Appl. Opt. 2008, 47, 4945–4951. [Google Scholar] [CrossRef]
- Dong, X.H.; Qi, H.; Ren, L.J.; Wang, Y.P.; Di, Y.A.; Sugimoto, N.; Sakmoto, K.; Wang, Q.Y. Application and Data Demonstration of Lidar in Sandstorm Observation. Res. Environ. Sci. 2007, 2, 106–111. [Google Scholar] [CrossRef]
- Guo, B.J.; Liu, L.; Huang, D.P.; Wang, L.L.; Li, X.L. Analysis of Lidar Measurements from a Dust Event. Meteorol. Mon. 2008, 5, 52–57. [Google Scholar] [CrossRef]
- Wang, Y.P.; Chen, Y.; Dong, X.H.; Yin, H.M. Observation of Sand-Dust Weather by Lidar in the Spring of 2005 at Beijing. Chin. J. Spectrosc. Lab. 2008, 25, 33–35. [Google Scholar] [CrossRef]
- Yang, T.; Wang, Z.F.; Zhang, B.; Wang, X.Q.; Wang, W.; Gbaguidi, A.; Gong, Y.B. Evaluation of the effect of air pollution control during the Beijing 2008 Olympic Games using Lidar data. Chin. Sci. Bull. 2010, 55, 1311–1316. [Google Scholar] [CrossRef]
- Huang, T.; Song, Y.; Hu, W.D.; Guo, B.J. Lidar Detection of a Sand-Dust Process in Dalian, Liaoning, China. J. Desert Res. 2010, 30, 983–988. [Google Scholar]
- Fujiwara, C.; Yamashita, K.; Nakanishi, M.; Fujiyoshi, Y. Dust Devil–Like Vortices in an Urban Area Detected by a 3D Scanning Doppler Lidar. J. Appl. Meteorol. Climatol. 2011, 3, 534–547. [Google Scholar] [CrossRef]
- Ma, J.H.; Gu, S.Q.; Chen, M.; Shi, H.; Zhang, G.L. Analysis of a dust case using lidar in Shanghai. Acta Ecol. Sin. 2012, 32, 1085–1096. [Google Scholar] [CrossRef] [Green Version]
- Chouza, F.; Reitebuch, O.; Groß, S.; Rahm, S.; Freudenthaler, V.; Toledano, C.; Weinzierl, B. Retrieval of aerosol backscatter and extinction from airborne coherent Doppler wind lidar measurements. Atmos. Meas. Tech. 2015, 8, 2909–2926. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Preißler, J.; Wiegner, M.; von Löwis, S.; Petersen, G.N.; Parks, M.M.; Finger, D.C. Monitoring Dust Events Using Doppler Lidar and Ceilometer in Iceland. Atmosphere 2020, 11, 1294. [Google Scholar] [CrossRef]
- Yuan, J.; Wu, Y.; Shu, Z.; Su, L.; Tang, D.; Yang, Y.; Dong, J.; Yu, S.; Zhang, Z.; Xia, H. Real-Time Synchronous 3-D Detection of Air Pollution and Wind Using a Solo Coherent Doppler Wind Lidar. Remote Sens. 2022, 14, 2809. [Google Scholar] [CrossRef]
- Wang, X.; Dai, G.; Wu, S.; Sun, K.; Song, X.; Chen, W.; Li, R.; Yin, J.; Wang, X. Retrieval and Calculation of Vertical Aerosol Mass Fluxes by a Coherent Doppler Lidar and a Sun Photometer. Remote Sens. 2021, 13, 3259. [Google Scholar] [CrossRef]
- Song, X.; Wang, F.; Yin, J.; Wang, X.; Liu, X.; Ren, H.; Wu, S. Three-Beam Methodology and Observations of Wind Profiling with Doppler Lidar. Period. Ocean Univ. China 2020, 50, 136–144. [Google Scholar] [CrossRef]
- Wang, L.; Wei, Q.; Xia, H.; Wei, T.; Yuan, J.; Jiang, P. Robust Solution for Boundary Layer Height Detections with Coherent Doppler Wind Lidar. Adv. Atmos. Sci. 2021, 38, 1920–1928. [Google Scholar] [CrossRef]
- Liu, S.; Liang, X. Observed diurnal cycle climatology of planetary boundary layer height. J. Clim. 2010, 23, 5790–5809. [Google Scholar] [CrossRef]
- Tang, S.; Guo, Y.; Wang, X.; Tang, J.; Li, T.; Zhao, B.; Zhang, S.; Li, Y. Validation of Doppler Wind Lidar during Super Typhoon Lekima (2019). Front. Earth Sci. 2022, 16, 75–89. [Google Scholar] [CrossRef]
- Lin, X.; Wei, Y.; Chen, H.; Wang, Y. The effect assessment of wind field inversion based on WPR in precipitation. J. Appl. Meteor. Sci. 2020, 31, 361–372. [Google Scholar] [CrossRef]
- Ren, Y.; Chen, S.; Yu, A.; Fan, M. Reliability Analysis of Wind Field and Boundary Layer Height in Xiamen Retrieved by Coherent Doppler Wind Lidar. J. Arid Meteorol. 2021, 39, 514–523. [Google Scholar] [CrossRef]
- Wildmann, N.; Päschke, E.; Roiger, A.; Mallaun, C. Towards improved turbulence estimation with Doppler wind lidar velocity-azimuth display (VAD) scans. Atmos. Meas. Tech. 2020, 13, 4141–4158. [Google Scholar] [CrossRef]
- Liu, Z.; Barlow, J.F.; Chan, P.-W.; Fung, J.C.H.; Li, Y.; Ren, C.; Mak, H.W.L.; Ng, E. A Review of Progress and Applications of Pulsed Doppler Wind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Jin, X.; Weng, N.; Zhu, W.; Liu, Q.; Chen, J. Simultaneous Extraction of Planetary Boundary-Layer Height and Aerosol Optical Properties from Coherent Doppler Wind Lidar. Sensors 2022, 22, 3412. [Google Scholar] [CrossRef]
- Wang, Y.; Sayit, H.; Ali, M.; Zhu, J.; Zhou, C.; Huo, W.; Yang, F.; Yang, X.; Gao, J.; Zhao, X. Evaluation of five planetary boundary layer schemes in WRF over China’s largest semi-fixed desert. Atmos. Res. 2021, 256, 105567. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| u (m/s) | v (m/s) | Wind Speed (m/s) | Wind Direction (°) | |
|---|---|---|---|---|
| Dusty weather | 1.18 | 1.79 | 1.00 | 15.04 |
| Precipitation | 1.53 | 1.90 | 1.05 | 13.85 |
| Clear sky | 1.34 | 1.97 | 1.46 | 21.09 |
| Type | 1 | 2 | 3 |
|---|---|---|---|
| Sample Size | 199 | 21 | 61 |
| Dust | 109 (54.77%) | 10 (47.62%) | 12 (19.67%) |
| Precipitation | 29 (14.57%) | 5 (23.81%) | 6 (9.84%) |
| Clear Sky | 61 (30.65%) | 6 (28.57%) | 43 (70.49%) |
| Sample Size | 154 | 18 | 54 |
| 8:00 | 199 (77.27%) | 2 (11.11%) | 1 (1.85%) |
| 20:00 | 35 (22.73%) | 16 (88.89%) | 53 (98.15%) |
| Type | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Sample Size | 130 | 70 | 59 | 22 |
| Dust | 89 (68.46%) | 21 (30.00%) | 10 (16.95%) | 13 (59.09%) |
| Precipitation | 18 (13.85%) | 11 (15.71%) | 6 (10.17%) | 5 (22.73%) |
| Clear Sky | 23 (17.69%) | 38 (54.29%) | 43 (72.88%) | 4 (18.18%) |
| Sample Size | 101 | 54 | 52 | 19 |
| 8:00 | 70 (69.31%) | 49 (90.74%) | 0 (0.00%) | 3 (15.79%) |
| 20:00 | 31 (30.69%) | 5 (9.26%) | 52 (100.00%) | 16 (84.21%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, M.; Wang, Y.; Mamtimin, A.; Gao, J.; Aihaiti, A.; Zhou, C.; Yang, F.; Huo, W.; Wen, C.; Wang, B. Applicability Assessment of Coherent Doppler Wind LiDAR for Monitoring during Dusty Weather at the Northern Edge of the Tibetan Plateau. Remote Sens. 2022, 14, 5264. https://doi.org/10.3390/rs14205264
Song M, Wang Y, Mamtimin A, Gao J, Aihaiti A, Zhou C, Yang F, Huo W, Wen C, Wang B. Applicability Assessment of Coherent Doppler Wind LiDAR for Monitoring during Dusty Weather at the Northern Edge of the Tibetan Plateau. Remote Sensing. 2022; 14(20):5264. https://doi.org/10.3390/rs14205264
Chicago/Turabian StyleSong, Meiqi, Yu Wang, Ali Mamtimin, Jiacheng Gao, Ailiyaer Aihaiti, Chenglong Zhou, Fan Yang, Wen Huo, Cong Wen, and Bo Wang. 2022. "Applicability Assessment of Coherent Doppler Wind LiDAR for Monitoring during Dusty Weather at the Northern Edge of the Tibetan Plateau" Remote Sensing 14, no. 20: 5264. https://doi.org/10.3390/rs14205264