

New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea
Abstract
:1. Introduction
2. Raw Radar Data Preprocessing
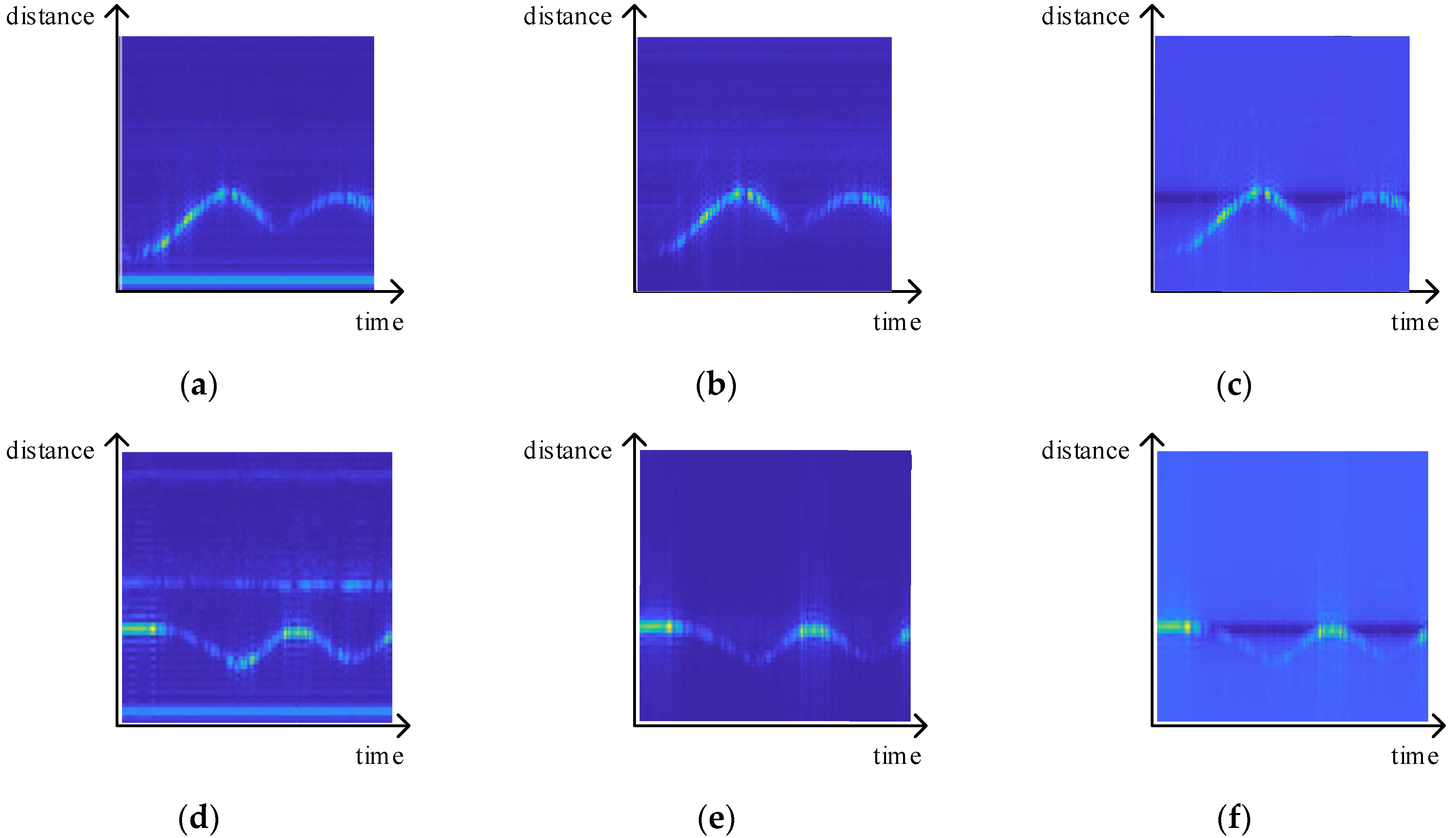
3. Handwriting Trajectory Reconstruction
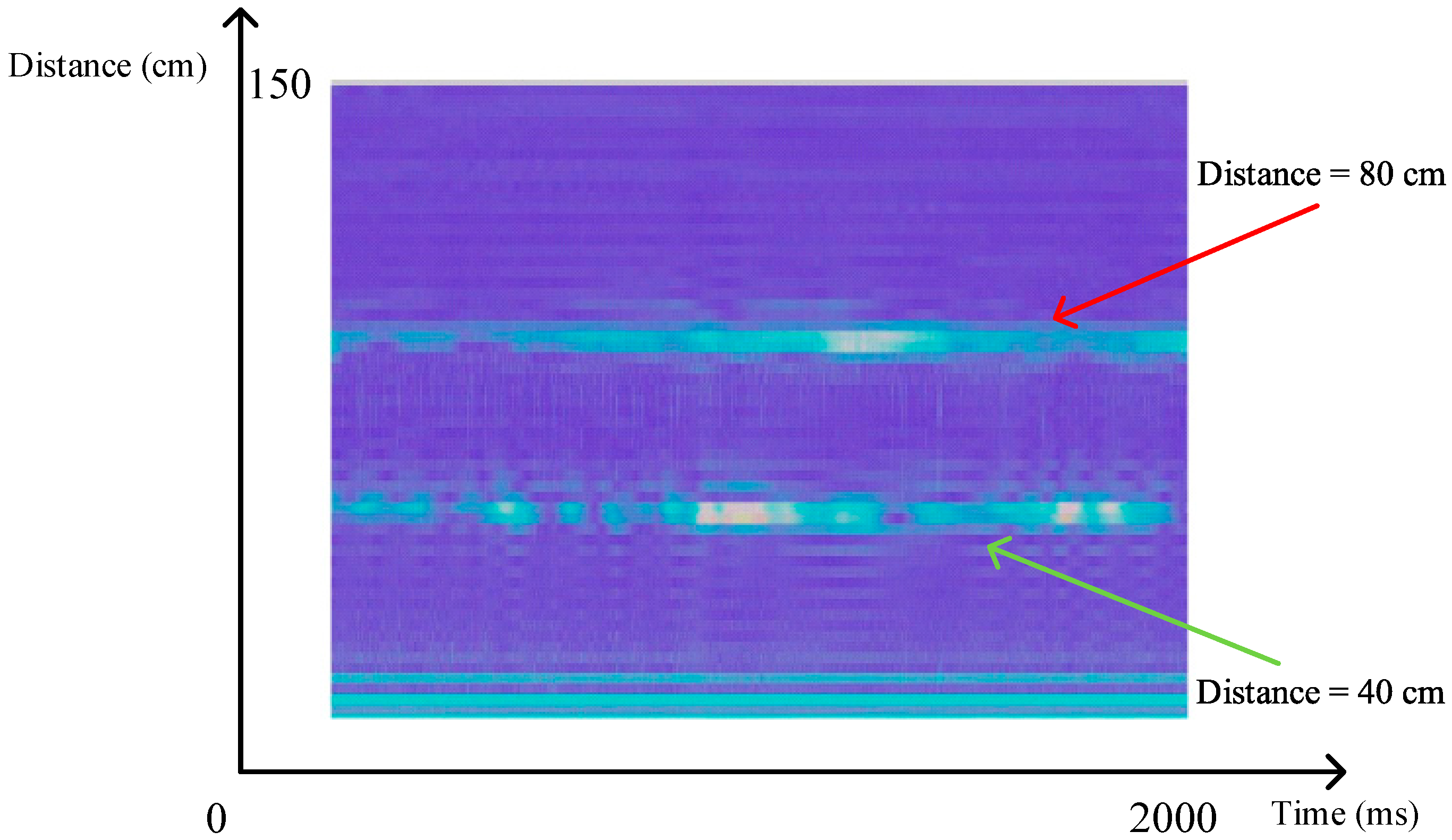
3.1. Distance Approximation Method
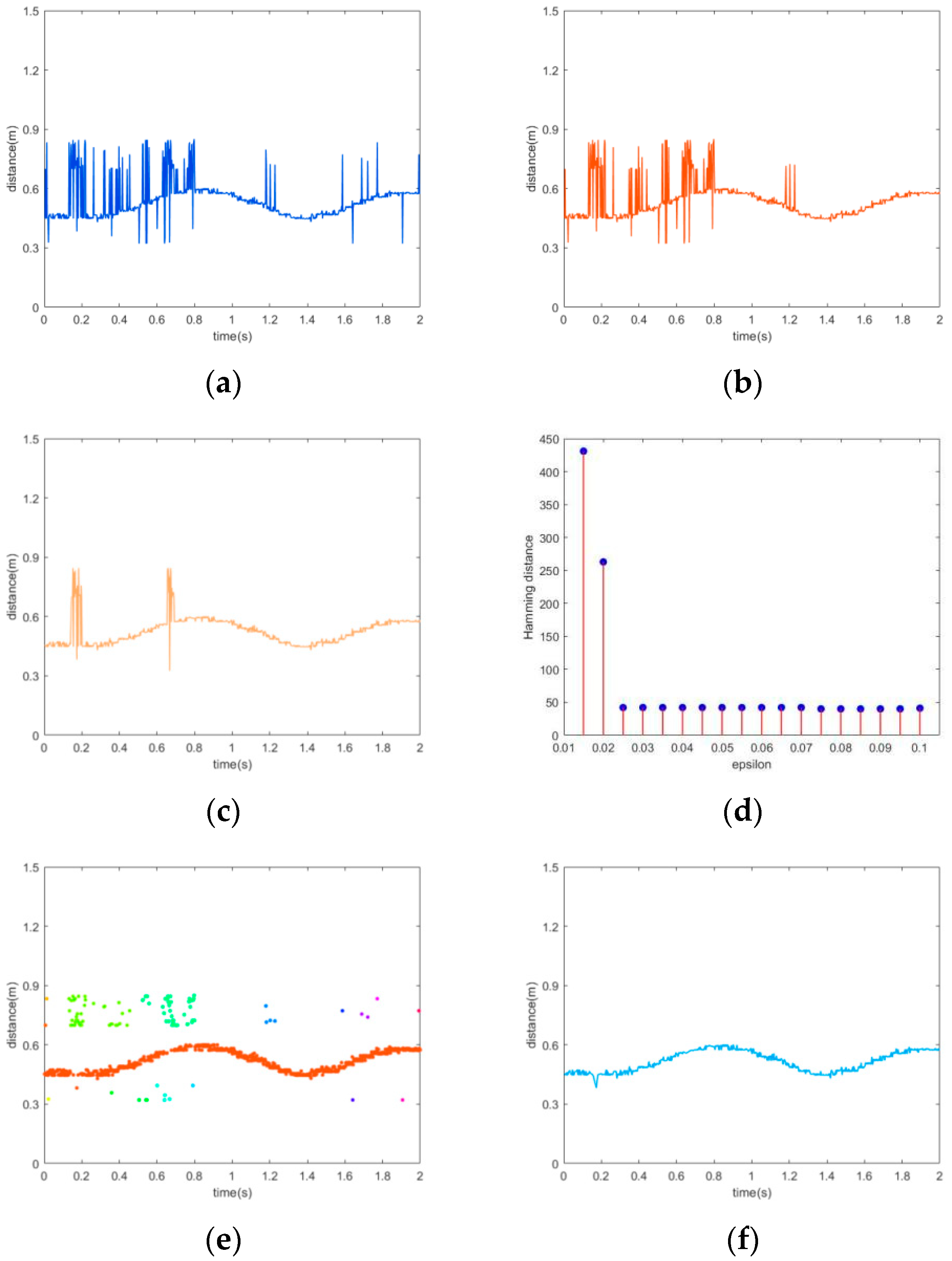
3.2. Trajectory Extraction Method Based on Peak-Value Search
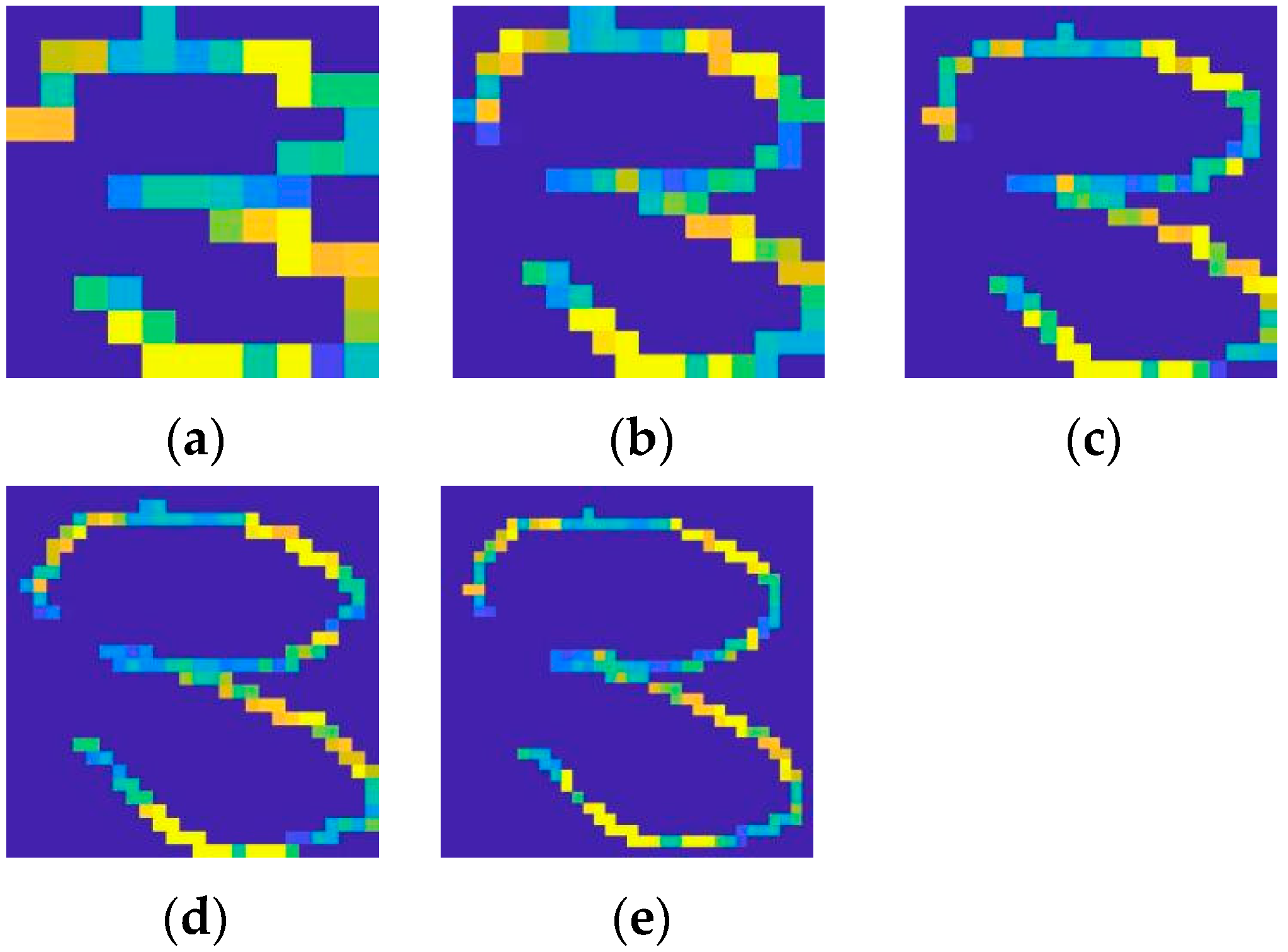
3.3. Trajectory Re-Extraction by CDBSCAN
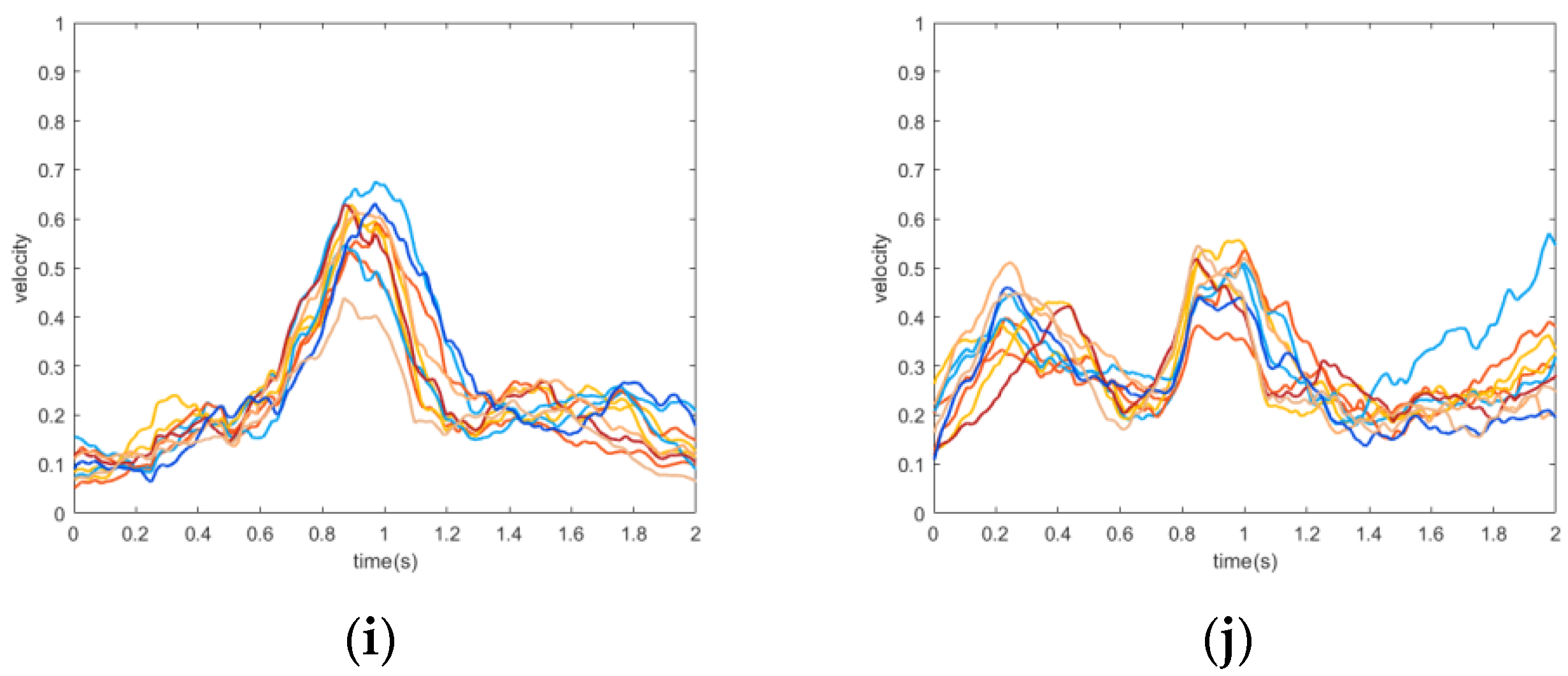
3.4. Trajectory Reconstruction with Velocity Features
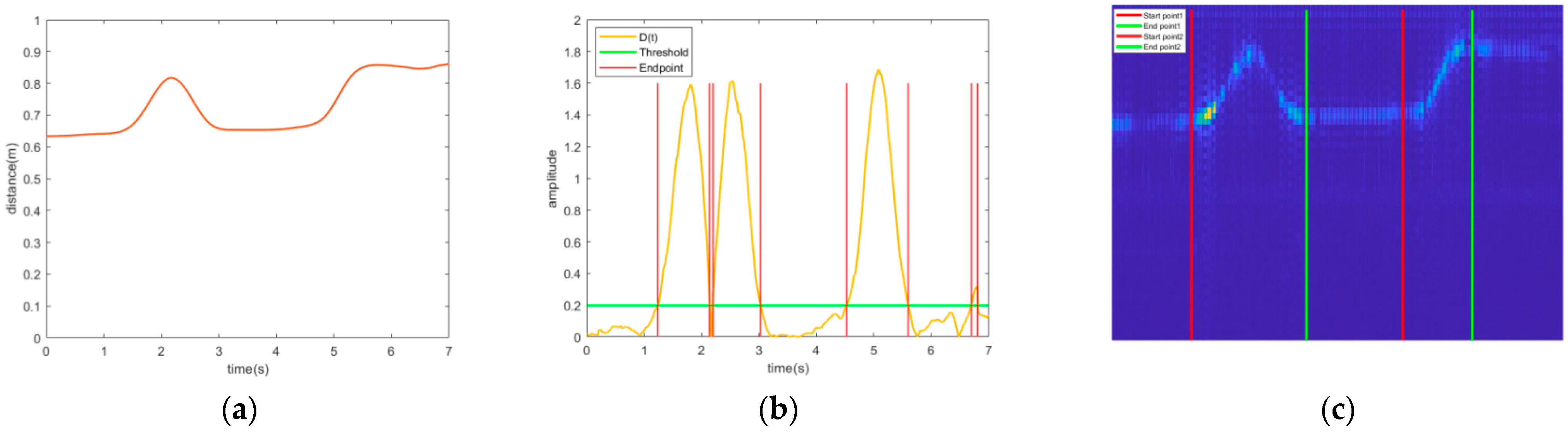
4. Gesture Segmentation Based on Twice-Difference and High–Low Thresholds
5. Air Writing Trajectories Recognition
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, X.; He, Y.; Fioranelli, F.; Jing, X. Semisupervised human activity recognition with radar micro-Doppler signatures. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5103112. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G. Radar data cube processing for human activity recognition using multisubspace learning. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3617–3628. [Google Scholar] [CrossRef]
- Skaria, S.; Al-Hourani, A.; Lech, M.; Evans, R.J. Hand-gesture recognition using two-antenna Doppler radar with deep convolutional neural networks. IEEE Sens. J. 2019, 19, 3041–3048. [Google Scholar] [CrossRef]
- Hazra, S.; Santra, A. Robust gesture recognition using millimetric-wave radar system. IEEE Sens. Lett. 2018, 2, 7001804. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, Z.; Wang, H. Human Detection and Action Classification Based on Millimeter Wave Radar Point Cloud Imaging Technology. In Proceedings of the 2021 Signal Processing Symposium, Lodz, Poland, 20–23 September 2021; pp. 294–299. [Google Scholar]
- Li, Z.; Lei, Z.; Yan, A.; Solovey, E.; Pahlavan, K. ThuMouse: A Micro-gesture Cursor Input through mmWave Radar-based Interaction. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–9. [Google Scholar]
- Xia, Z.; Xu, F. Time-Space Dimension Reduction of Millimeter-Wave Radar Point-Clouds for Smart-Home Hand-Gesture Recognition. IEEE Sens. J. 2022, 22, 4425–4437. [Google Scholar] [CrossRef]
- Kim, Y.; Alnujaim, I.; Oh, D. Human activity classification based on point clouds measured by millimeter wave MIMO radar with deep recurrent neural networks. IEEE Sens. J. 2021, 21, 13522–13529. [Google Scholar] [CrossRef]
- Wang, Y.; Shu, Y.; Jia, X.; Zhou, M.; Xie, L.; Guo, L. Multifeature Fusion-Based Hand Gesture Sensing and Recognition System. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Arsalan, M.; Santra, A.; Issakov, V. RadarSNN: A Resource Efficient Gesture Sensing System Based on mm-Wave Radar. IEEE Trans. Microw. Theory Tech. 2022, 70, 2451–2461. [Google Scholar] [CrossRef]
- Shen, X.; Zheng, H.; Feng, X.; Hu, J. ML-HGR-Net: A Meta-Learning Network for FMCW Radar Based Hand Gesture Recognition. IEEE Sens. J. 2022, 22, 10808–10817. [Google Scholar] [CrossRef]
- Elshenaway, A.R.; Guirguis, S.K. On-Air Hand-Drawn Doodles for IoT Devices Authentication During COVID-19. IEEE Access 2021, 9, 161723–161744. [Google Scholar] [CrossRef]
- Kane, L.; Khanna, P. Vision-Based Mid-Air Unistroke Character Input Using Polar Signatures. IEEE Trans. Hum. Mach. Syst. 2017, 47, 1077–1088. [Google Scholar] [CrossRef]
- Hsieh, C.-H.; Lo, Y.-S.; Chen, J.-Y.; Tang, S.-K. Air-Writing Recognition Based on Deep Convolutional Neural Networks. IEEE Access 2021, 9, 142827–142836. [Google Scholar] [CrossRef]
- Pan, T.; Kuo, C.; Liu, H.; Hu, M. Handwriting Trajectory Reconstruction Using Low-Cost IMU. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 261–270. [Google Scholar] [CrossRef]
- Arsalan, M.; Santra, A. Character Recognition in Air-Writing Based on Network of Radars for Human-Machine Interface. IEEE Sens. J. 2019, 19, 8855–8864. [Google Scholar] [CrossRef]
- MArsalan; Santra, A.; Issakov, V. Radar Trajectory-based Air-Writing Recognition using Temporal Convolutional Network. In Proceedings of the 2020 19th IEEE International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 14–17 December 2020; pp. 1454–1459. [Google Scholar]
- Arsalan, M.; Santra, A.; Bierzynski, K.; Issakov, V. Air-Writing with Sparse Network of Radars using Spatio-Temporal Learning. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 8877–8884. [Google Scholar]
- Lee, H.; Lee, Y.; Choi, H.; Lee, S. Digit Recognition in Air-Writing Using Single Millimeter-Wave Band Radar System. IEEE Sens. J. 2022, 22, 9387–9396. [Google Scholar] [CrossRef]
- Hendy, N.; Fayek, H.M.; Al-Hourani, A. Deep Learning Approaches for Air-Writing Using Single UWB Radar. IEEE Sens. J. 2022, 22, 11989–12001. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Fu, Y.; Yao, D.; Xie, L.; Zhou, M. Multi-Hand Gesture Recognition Using Automotive FMCW Radar Sensor. Remote Sens. 2022, 14, 2374. [Google Scholar] [CrossRef]
- Krishna, K.; Murty, M.N. Genetic K-means algorithm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1999, 29, 433–439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, J.; Hao, X.; Liang, Z.; Liu, Y.; Wang, W.; Shao, L. Real-time superpixel segmentation by DBSCAN clustering algorithm. IEEE Trans. Image Process. 2016, 25, 5933–5942. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Number of transmitting antennas | 1 | Number of frames | 100 |
| Number of receiving antennas | 4 | Number of chirps | 128 |
| Frame period (ms) | 20 | Number of samples per chirp | 64 |
| Frequency slope (MHz/us) | 50 | Frequency band of front radar (GHz) | 77–79 |
| Sample rate (MHz) | 2 | Frequency band of side radar (GHz) | 79–81 |
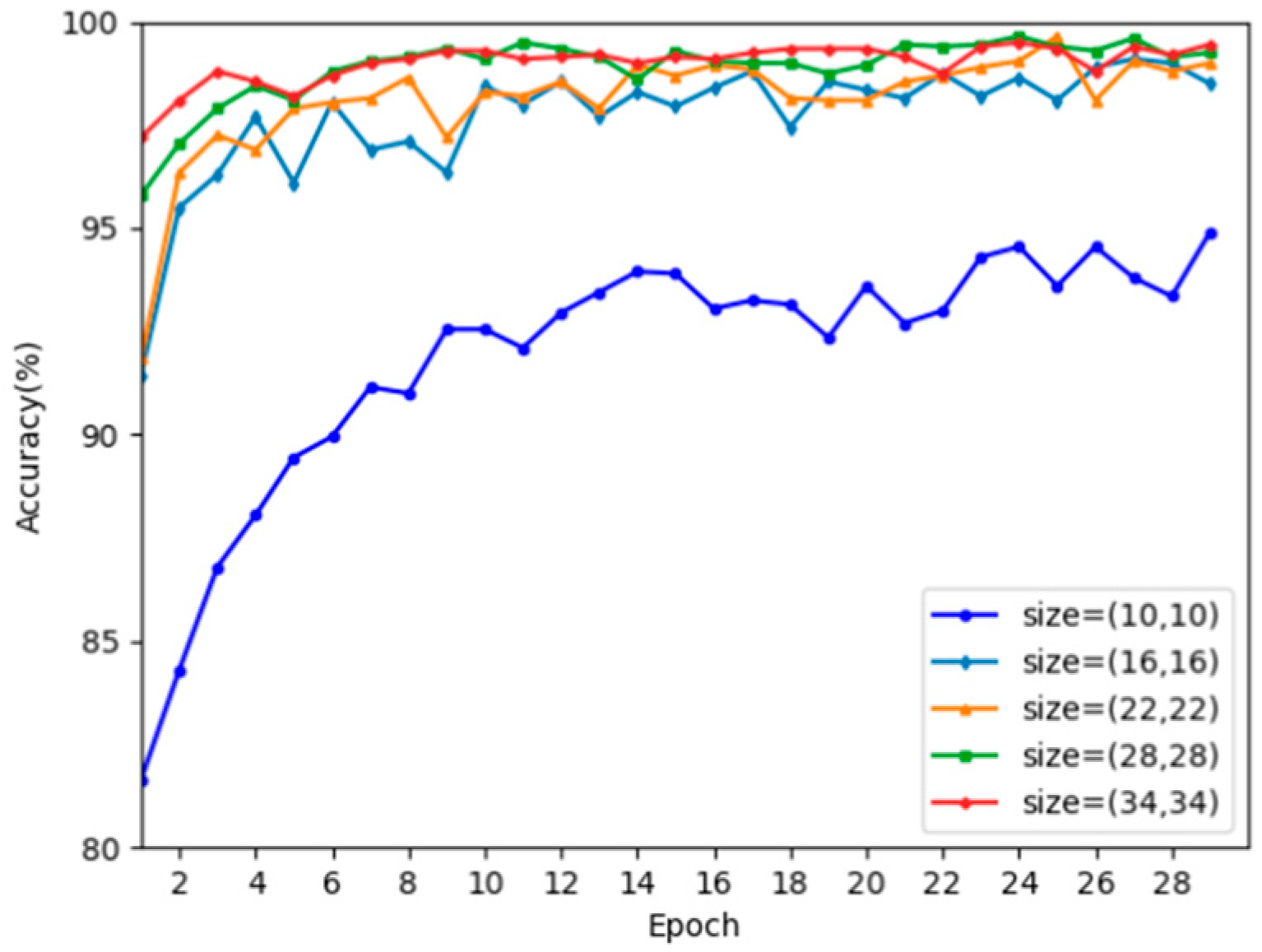
| Input Size | Number of Parameters | Time Cost (ms/step) | Accuracy (%) |
|---|---|---|---|
| 34 × 34 | 33,834 | 19 | 99.23 |
| 28 × 28 | 29,354 | 15 | 99.24 |
| 22 × 22 | 26,154 | 12 | 98.72 |
| 16 × 16 | 26,154 | 10 | 98.45 |
| 10 × 10 | 24,234 | 7 | 93.62 |
| Input Feature Map | Network Type | Average Accuracy (%) |
|---|---|---|
| FRTM | CNN | 76.60 |
| SRTM | CNN | 71.15 |
| FVTM | CNN | 82.15 |
| SVTM | CNN | 77.25 |
| FRTM + SRTM | Two-stream CNN | 89.65 |
| FVTM + SVTM | Two-stream CNN | 92.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Liu, T.; Feng, X.; Zhao, Z.; Cui, W.; Fan, Y. New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea. Remote Sens. 2022, 14, 5177. https://doi.org/10.3390/rs14205177
Zhao Y, Liu T, Feng X, Zhao Z, Cui W, Fan Y. New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea. Remote Sensing. 2022; 14(20):5177. https://doi.org/10.3390/rs14205177
Chicago/Turabian StyleZhao, Yinan, Tao Liu, Xiang Feng, Zhanfeng Zhao, Wenqing Cui, and Yu Fan. 2022. "New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea" Remote Sensing 14, no. 20: 5177. https://doi.org/10.3390/rs14205177