
Retrieval of Farmland Surface Soil Moisture Based on Feature Optimization and Machine Learning

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Materials
2.1.1. Study Area and In Situ SSM
2.1.2. Remote Sensing Data and Preprocessing
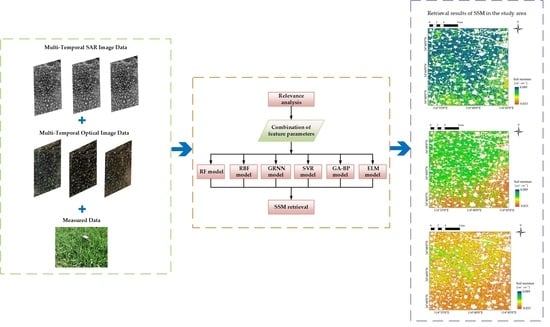
2.2. Methods
- Step 1. Feature parameter extraction
- Step 2. Feature optimization
- Step 3. Construction of the machine learning model
- Step 4. SSM prediction and precision evaluation
2.2.1. Polarization Feature Parameter Extraction
- Polarization feature parameter extraction from the Sentinel-1 dual-polarization data
- Polarization feature parameter extraction from the Radarsat-2 quad-polarization data
- Vegetation index and surface roughness
2.2.2. Feature Optimization
2.2.3. Construction of the Machine Learning Model
- RF model
- RBF model
- GRNN model
- SVR model
- GA-BP model
- ELM model
2.2.4. SSM Prediction and Precision Evaluation
3. Results
3.1. Accuracy of the Experimental Results
3.2. Spatial Distribution of SSM
4. Discussion
4.1. Accuracy Evaluation of the Experimental Results
4.2. Spatial Distribution Analysis of SSM
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, S.L.; Liu, Y.B.; Wen, Z.M. Review on soil moisture retrieval by satellite remote sensing. Prog. Geosci. 2012, 27, 1192–1203. [Google Scholar]
- Wang, H.Q.; Magagi, R.; Goita, K. Potential of a two-component polarimetric decomposition at C-band for soil moisture retrieval over agricultural fields. Remote Sens. Environ. 2018, 217, 38–51. [Google Scholar] [CrossRef]
- Anagnostopoulos, V.; Petropoulos, G.P.; Ireland, G.; Carlson, T.N. A modernized version of a 1D soil vegetation atmosphere transfer model for improving its future use in land surface interactions studies. Environ. Model. Softw. 2017, 90, 147–156. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Yuan, X.; Liu, H.; Gao, H.; Wang, X. Soil Moisture Estimation for Winter-Wheat Waterlogging Monitoring by Assimilating Remote Sensing Inversion Data into the Distributed Hydrology Soil Vegetation Model. Remote Sens. 2022, 14, 792. [Google Scholar] [CrossRef]
- Chen, S.; Yan, Q.; Jin, S.; Huang, W.; Chen, T.; Jia, Y.; Liu, S.; Cao, Q. Soil Moisture Retrieval from the CyGNSS Data Based on a Bilinear Regression. Remote Sens. 2022, 14, 1961. [Google Scholar] [CrossRef]
- Wang, S.N.; Li, R.P.; Wu, Y.J.; Zhao, S.X.; Wang, X.Q. Soil moisture inversion based on environmental variables and machine learning. J. Agric. Mach. 2022, 53, 332–341. [Google Scholar]
- Ma, H.Z.; Liu, S.M.; Peng, A.H.; Sun, L.; Sun, G.Y. Active and passive cooperative algorithm at L-Band for bare soil moisture inversion. Trans. Chin. Soc. Agric. Eng. 2016, 32, 133–138. [Google Scholar]
- Wang, S.G.; Ma, C.F.; Zhao, Z.B.; Wei, L. Estimation of Soil Moisture of Agriculture Field in the Middle Reaches of the Heihe River Basin based on Sentinel-1 and Landsat 8 Imagery. Remote Sens. Technol. Appl. 2020, 35, 13–22. [Google Scholar]
- Wang, Y.T. Remote Sensing Retrieval of Soil Moisture in Ordos Blown-Sand Region Based on SVR. Master’s Thesis, Chang’an University, Xi’an, China, 2019. [Google Scholar]
- Lin, L.B. Soil Moisture Retrieval under Vegetation Cover Using Multi-Source Remote Sensing Data. Master’s Thesis, Nanjing University of Information Science and Technology, Nanjing, China, 2018. [Google Scholar]
- Zhang, W.F.; Chen, E.X.; Li, Z.Y.; Yang, H.; Zhao, L. Review of applications of radar remote sensing in agriculture. J. Radars 2020, 9, 444–461. [Google Scholar]
- Xu, J.X.; Li, X.; Zhu, Y.C.; Fang, S.B.; Wu, D.; Wu, Y.J. Progress of the Methods of Remote Sensing Monitoring the Soil Moisture. Adv. Meteorol. Sci. Technol. 2019, 9, 17–23. [Google Scholar]
- Gong, R. Overview of “Sentinel” satellite family. Space Int. 2014, 7, 23–28. [Google Scholar]
- Attema, E.; Davidson, M.; Floury, N.; Levrini, G.; Snoeij, P. Sentinel-1 ESA’s New European Radar Observatory. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Yang, K.; Yang, J.B.; Jiang, B.R. Sentinel-1 Satellite Overview. Urban Geotech. Investig. Surv. 2015, 2, 24–27. [Google Scholar]
- Yang, B.; Li, D.; Gao, G.S.; Chen, C.; Wang, L. Processing analysis of Sentinel-2A data and application to arid valleys extraction. Remote Sens. Land Resour. 2018, 30, 128–135. [Google Scholar]
- Huang, S.; Ding, J.L.; Zhang, J.Y.; Chen, W.Q. Backscattering Coefficient Research Based on Microwave Remote Sensing of Radarsat-2 Satellite. Acta Opt. Sin. 2017, 37, 317–327. [Google Scholar]
- Zhu, L.; Si, R.; Shen, X.; Walker, J.P. An advanced change detection method for time-series soil moisture retrieval from Sentinel-1. Remote Sens. Environ. 2022, 279, 113137. [Google Scholar] [CrossRef]
- Sun, J.X.; Zhang, D.Y.; Hou, Y.C. Multi-source Remote Sensing Data Cooperates to Retrieve Forest Surface Soil Moisture. Remote Sens. Technol. Appl. 2021, 36, 564–570. [Google Scholar]
- Rains, D.; Lievens, H.; Lannoy, G.J.M.D.; Mccabe, M.F.; Miralles, D.G. Sentinel-1 Backscatter Assimilation Using Support Vector Regression or the Water Cloud Model at European Soil Moisture Sites. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Abbes, A.B.; Magagi, R.; Goita, K. Soil Moisture Estimation from Smap Observations Using Long Short- Term Memory (LSTM). In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 1590–1593. [Google Scholar]
- Tsagkatakis, G.; Moghaddam, M.; Tsakalides, P. Multi-Temporal convolutional neural networks for satellite-derived soil moisture observation enhancement. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4602–4605. [Google Scholar]
- Greifeneder, F.; Notarnicola, C.; Wagner, W. AMachine Learning-Based Approach for Surface Soil Moisture Estimations with Google Earth Engine. Remote Sens. 2021, 13, 2099. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic Use of Sentinel-1 and Sentinel-2 Images for Operational Soil Moisture Mapping at High Spatial Resolution over Agricultural Areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.Y.; Li, C.C.; Ma, X.X.; Wang, B.S.; Fang, X. Atmospheric Correction Method of Sentinel-2A Satellite and Result Analysis. Remote Sens. Inf. 2018, 33, 41–48. [Google Scholar]
- Christiansen, M.P.; Teimouri, N.; Laursen, M.S.; Mikkelsen, B.F.; Jorgensen, R.N. Preprocessed Sentinel-1 data via a web service focused on agricultural field monitoring. IEEE Access 2019, 7, 65139–65149. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Chen, X. Quad Polarization Synthetic Aperture Radar Image Processing; Science Press: Beijing, China, 2008. [Google Scholar]
- Guan, Y.T.; Li, J.P. Soil moisture inversion based on genetic optimization neural network and multi-source remote sensing data. J. Water Resour. Water Eng. 2019, 30, 255–259. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Li, Z.; Liao, J.J. Inversion Model and Method of Surface Parameters of Synthetic Aperture Radar; Science Press: Beijing, China, 2011. [Google Scholar]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Zhou, Z.F.; Liao, J. Study on Soil Moisture Retrieval of Tobacco Field in Karst Plateau Mountainous Area Based on Freeman Decomposition. Geogr. Geo-Inf. Sci. 2016, 32, 72–76. [Google Scholar]
- Gherboudj, I.; Magagi, R.; Berg, A.A.; Toth, B. Characterization of the Spatial Variability of In-Situ Soil Moisture Measurements for Upscaling at the Spatial Resolution of RADARSAT-2. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1813–1823. [Google Scholar] [CrossRef]
- Mei, X.; Nie, W.; Liu, J.Y. Difference Analysis of Multiply Radar Vegetation Indices Base on Radarsat-2 Full-polarization Data. Chin. J. Agric. Resour. Reg. Plan. 2019, 3, 21–28. [Google Scholar]
- Van, Z.J.J.; Zebker, H.A.; Elachi, C. Imaging radar polarization signatures: Theory and observation. Ratio Sci. 1987, 22, 529–543. [Google Scholar]
- Fu, Y.Z. Study on Vegetation Index of Remote Sensing and Its Applications. Master’s Thesis, Fuzhou University, Fuzhou, China, 2010. [Google Scholar]
- Zhao, X.; Wang, J.D.; Liu, S.H. Modified monitoring method of vegetation water content based on coupled radiative transfer model. J. Infrared Millim. Wave 2010, 29, 185–189. [Google Scholar] [CrossRef]
- Wang, D.C.; Wang, J.H.; Jin, N.; Wang, Q.; Li, C.J.; Huang, J.F.; Wang, Y.; Huang, F. ANN-based wheat biomass estimation using canopy hyperspectral vegetation indices. Trans. Chin. Soc. Agric. Eng. 2008, 24 (Suppl. 2), 196–201. [Google Scholar]
- Zhao, J.H.; Zhang, B.; Li, N.; Guo, Z.W. Cooperative Inversion of Winter Wheat Covered Surface Soil Moisture Based on Sentinel-1/2 Remote Sensing Data. J. Electron. Inf. 2021, 43, 692–699. [Google Scholar]
- Wang, Z.X.; Liu, C.; Huete, A. From AVHRR-NDVI to MODIS-EVI: Advances in Vegetation Index Research. Acta Ecol. Sin. 2003, 5, 979–987. [Google Scholar]
- Tong, L.; Chen, Y.; Jia, M.Q. Mechanism of Radar Remote Sensing; Science Press: Beijing, China, 2014. [Google Scholar]
- Fang, K.N.; Wu, J.B.; Zhu, J.P.; Xie, B.C. A Review of Technologies on Random Forests. J. Stat. Inf. 2011, 26, 32–38. [Google Scholar]
- Chu, Q.L.; Ping, Z.D.; Yu, M.J. Prediction model of octane loss based on RBF neural network. Internet Things Technol. 2010, 135, 230–267. [Google Scholar]
- Guo, J.; Liu, J.; Ning, J.F.; Han, W. Construction and validation of farmland surface soil moisture retrieval model based on sentinel multi-source data. Trans. Chin. Soc. Agric. Eng. 2019, 35, 71–78. [Google Scholar]
- Brereton, R.G.; Lloyd, G.R. Support Vector Machines for classification and regression. Analyst 2010, 135, 230–267. [Google Scholar] [CrossRef]
- Ma, Y.J.; Yun, W.X. Research progress of genetic algorithm. Appl. Res. Comput. 2012, 29, 1201–1206, 1210. [Google Scholar]
- Li, X.L.; Zhao, H.L.; Zhao, H.L.; Wang, R.; Hao, Z. Soil Water content inversion based on extreme learning machine model. Sci. Surv. Mapp. 2021, 46, 91–97. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Acquisition Date | Phenological Period | Product Type | Polarization Mode |
|---|---|---|---|---|
| Sentinel-1 (SAR Image Data) | 22 March 2020 | Standing Stage | IW SLC | Dual-Polarization |
| 4 April 2020 | Jointing Stage | |||
| 21 May 2020 | Filling Stage | |||
| Radarsat-2 (SAR Image Data) | 15 March 2020 | Standing Stage | Standard Quad-Polarization | Quad-Polarization |
| 8 April 2020 | Jointing Stage | |||
| 26 May 2020 | Filling Stage | |||
| Sentinel-2 (Optical Image Data) | 23 March 2020 | Standing Stage | L2A | |
| 12 April 2020 | Jointing Stage | |||
| 22 May 2020 | Filling Stage |
| No. | Parameter | CC | No. | Parameter | CC |
|---|---|---|---|---|---|
| 1 | NDWI | 0.5834 ** | 12 | / | −0.236 |
| 2 | (Scattering Angle) | 0.4143 * | 13 | λ1 | −0.219 |
| 3 | 0.3992 * | 14 | H (Scattering Entropy) | 0.1424 | |
| 4 | θ | −0.3971 * | 15 | Zs | −0.1401 |
| 5 | A (Anisotropy) | −0.3723 * | 16 | EVI | 0.1331 |
| 6 | FVI | −0.3321 * | 17 | × | −0.0751 |
| 7 | −0.3281 * | 18 | λ2 (Eigenvalue) | −0.0685 | |
| 8 | NDVI | −0.3134 * | 19 | RVI | 0.0642 |
| 9 | MSI | −0.2987 | 20 | - | −0.0604 |
| 10 | cos(θ) | 0.2700 | 21 | + | 0.0511 |
| 11 | sin(θ) | −0.2699 | 22 | WBI | −0.0501 |
| No. | Parameter | CC | No. | Parameter | CC |
|---|---|---|---|---|---|
| 1 | (Scattering Angle) | 0.4961 ** | 20 | Zs | −0.1231 |
| 2 | NDWI | 0.4102 * | 21 | sin(θ) | −0.1197 |
| 3 | Van_RVI | −0.3843 * | 22 | / | 0.1076 |
| 4 | 0.3821 * | 23 | cos(θ) | −0.1031 | |
| 5 | Freeman_Dbl | −0.3694 * | 24 | × | −0.0767 |
| 6 | λ1 (Eigenvalue) | −0.3691 * | 25 | + | 0.0720 |
| 7 | A (Anisotropy) | 0.3639 * | 26 | Kim_RVI | −0.0643 |
| 8 | λ3 (Eigenvalue) | −0.3513 * | 27 | 0.0638 | |
| 9 | θ | −0.3387 * | 28 | RVI | 0.0576 |
| 10 | λ2 (Eigenvalue) | −0.3141 * | 29 | + | 0.0553 |
| 11 | MSI | −0.3140 * | 30 | × | −0.0537 |
| 12 | / | 0.2986 | 31 | WBI | −0.0486 |
| 13 | FVI | 0.2548 | 32 | Freeman_RVI | −0.0324 |
| 14 | NDVI | 0.1736 | 33 | / | −0.0230 |
| 15 | −0.2565 | 34 | − | 0.0112 | |
| 16 | H (Scattering Entropy) | −0.1534 | 35 | 0.0070 | |
| 17 | − | 0.1483 | 36 | Freeman_Vol | 0.0012 |
| 18 | Freeman_Odd | 0.1442 | 37 | span | 0.0011 |
| 19 | EVI | 0.1253 |
| No. | Method | Parameter | Bias | RMSE | ubRMSE | R² |
|---|---|---|---|---|---|---|
| Sentinel-1 + Sentinel-2 | RF | 22 | 0.0138 | 0.0371 | 0.0365 | 0.5912 |
| 10 | 0.0086 | 0.0311 | 0.0306 | 0.6282 | ||
| RBF | 22 | 0.0211 | 0.0463 | 0.0451 | 0.5007 | |
| 10 | 0.0171 | 0.0358 | 0.0346 | 0.5697 | ||
| GRNN | 22 | 0.0183 | 0.0422 | 0.0418 | 0.5525 | |
| 10 | 0.0134 | 0.0350 | 0.0338 | 0.6087 | ||
| SVR | 22 | 0.0165 | 0.0416 | 0.0408 | 0.5414 | |
| 10 | 0.0146 | 0.0367 | 0.0353 | 0.5931 | ||
| GA-BP | 22 | 0.0118 | 0.0391 | 0.0376 | 0.5893 | |
| 10 | 0.0086 | 0.0337 | 0.0329 | 0.6167 | ||
| ELM | 22 | 0.0203 | 0.0387 | 0.0372 | 0.5516 | |
| 10 | 0.0173 | 0.0327 | 0.0304 | 0.6012 | ||
| Radarsat-2 + Sentinel-2 | RF | 37 | 0.0132 | 0.0332 | 0.0294 | 0.5954 |
| 10 | 0.0091 | 0.0271 | 0.0264 | 0.6395 | ||
| RBF | 37 | 0.0199 | 0.0403 | 0.0394 | 0.4976 | |
| 10 | 0.0167 | 0.0546 | 0.0490 | 0.6113 | ||
| GRNN | 37 | 0.0139 | 0.0371 | 0.0369 | 0.5675 | |
| 10 | 0.0113 | 0.0399 | 0.0373 | 0.6536 | ||
| SVR | 37 | 0.0155 | 0.0433 | 0.0424 | 0.5674 | |
| 10 | 0.0126 | 0.0376 | 0.0361 | 0.6076 | ||
| GA-BP | 37 | 0.0147 | 0.0341 | 0.0326 | 0.6039 | |
| 10 | 0.0114 | 0.0324 | 0.0289 | 0.6343 | ||
| ELM | 37 | 0.0197 | 0.0389 | 0.0366 | 0.5709 | |
| 10 | 0.0148 | 0.0317 | 0.0308 | 0.6186 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhang, C.; Min, L.; Guo, Z.; Li, N. Retrieval of Farmland Surface Soil Moisture Based on Feature Optimization and Machine Learning. Remote Sens. 2022, 14, 5102. https://doi.org/10.3390/rs14205102
Zhao J, Zhang C, Min L, Guo Z, Li N. Retrieval of Farmland Surface Soil Moisture Based on Feature Optimization and Machine Learning. Remote Sensing. 2022; 14(20):5102. https://doi.org/10.3390/rs14205102
Chicago/Turabian StyleZhao, Jianhui, Chenyang Zhang, Lin Min, Zhengwei Guo, and Ning Li. 2022. "Retrieval of Farmland Surface Soil Moisture Based on Feature Optimization and Machine Learning" Remote Sensing 14, no. 20: 5102. https://doi.org/10.3390/rs14205102