
High-Throughput Legume Seed Phenotyping Using a Handheld 3D Laser Scanner



Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Acquisition and Processing Environment
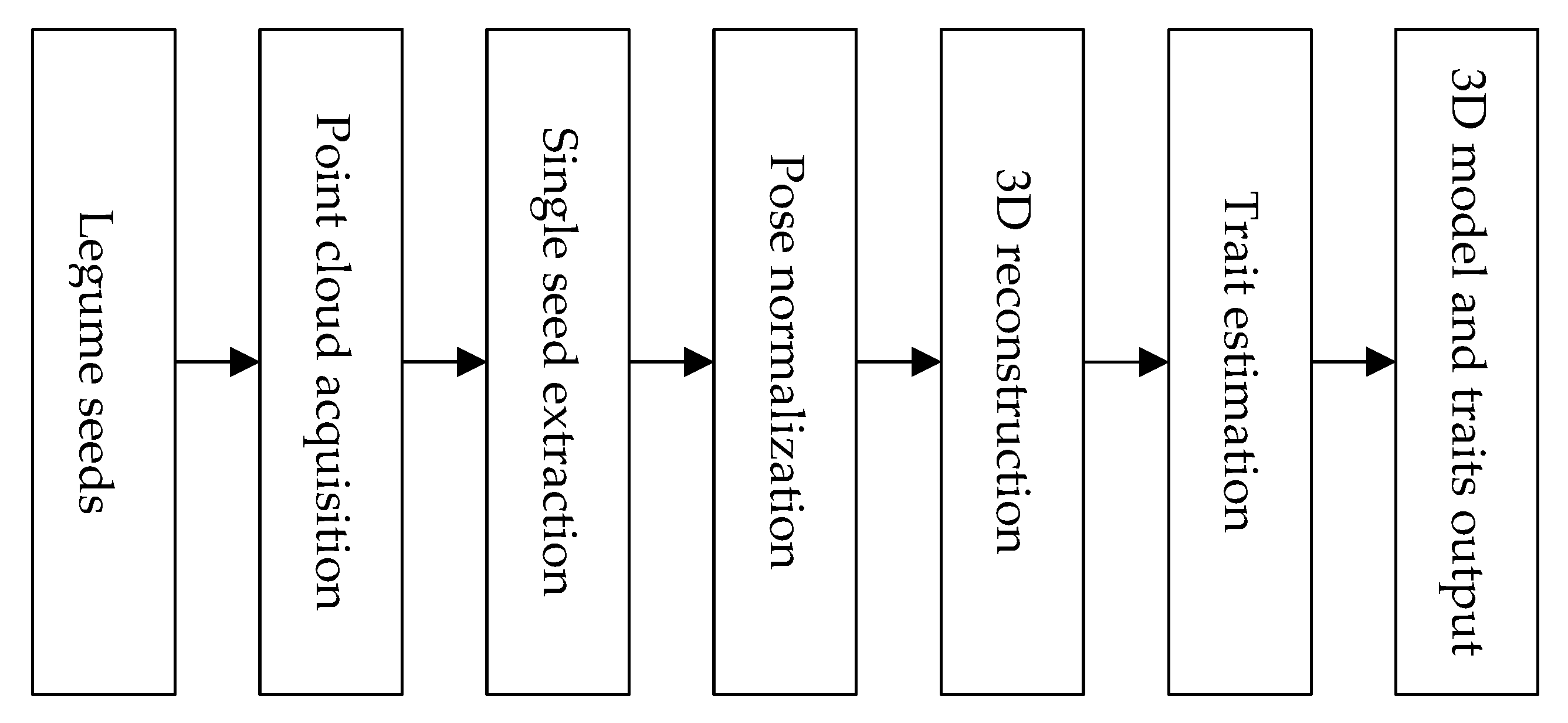
2.2. Automatic Measurement of Legume Seed Traits
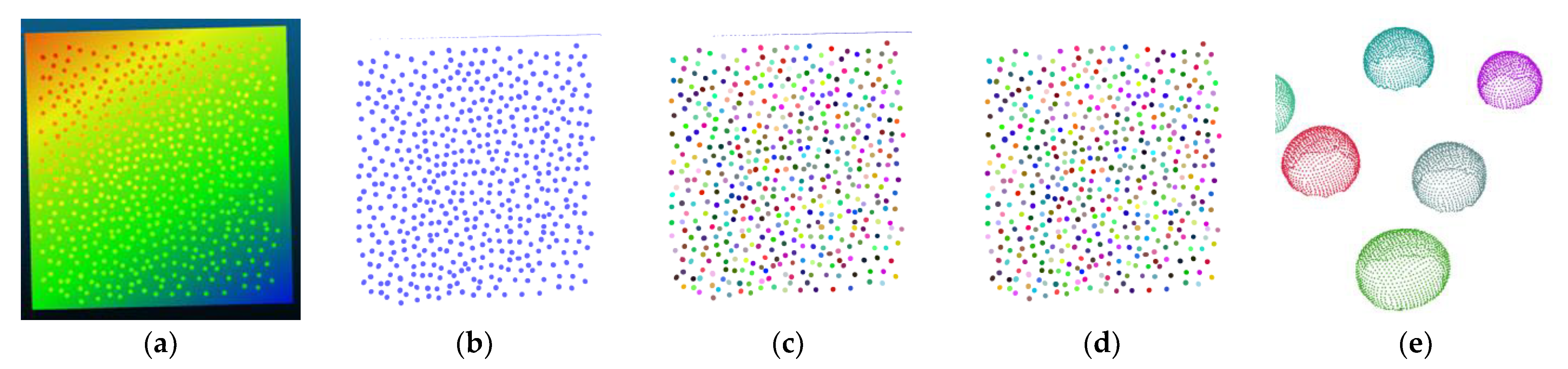
2.2.1. Single-Seed Extraction
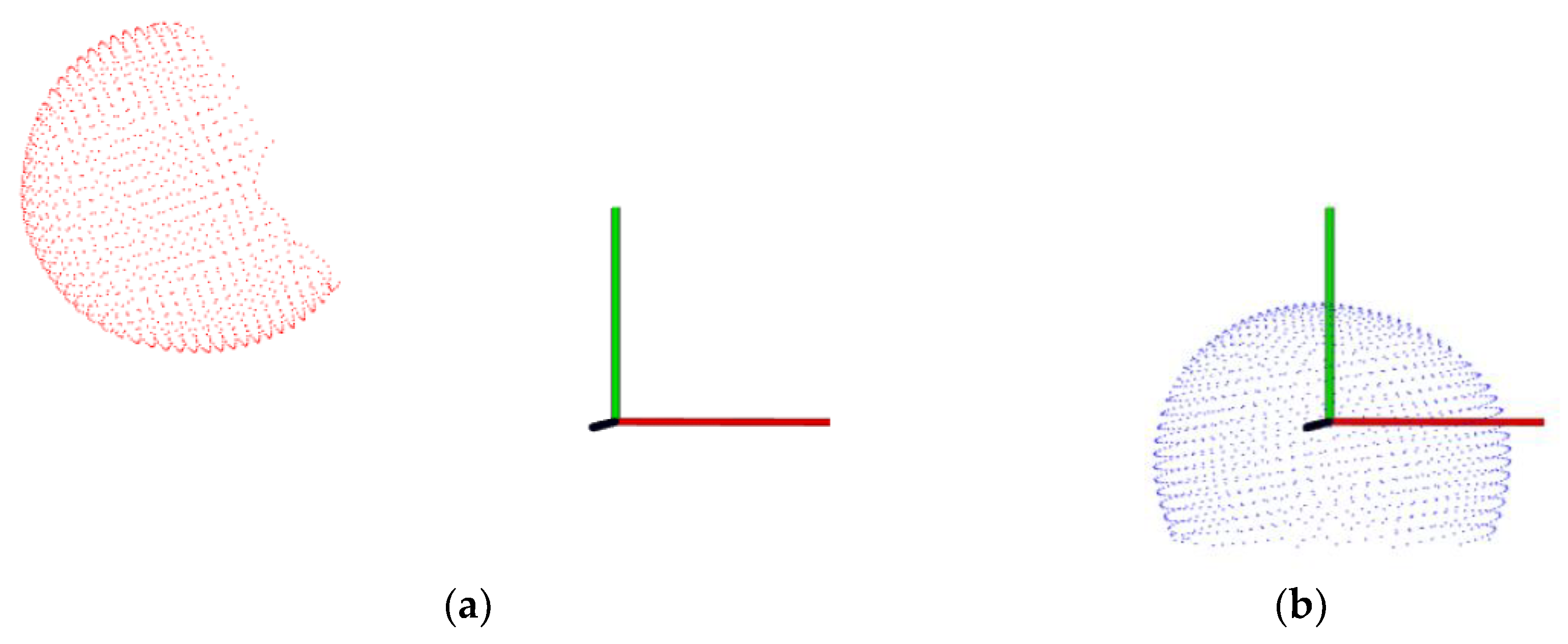
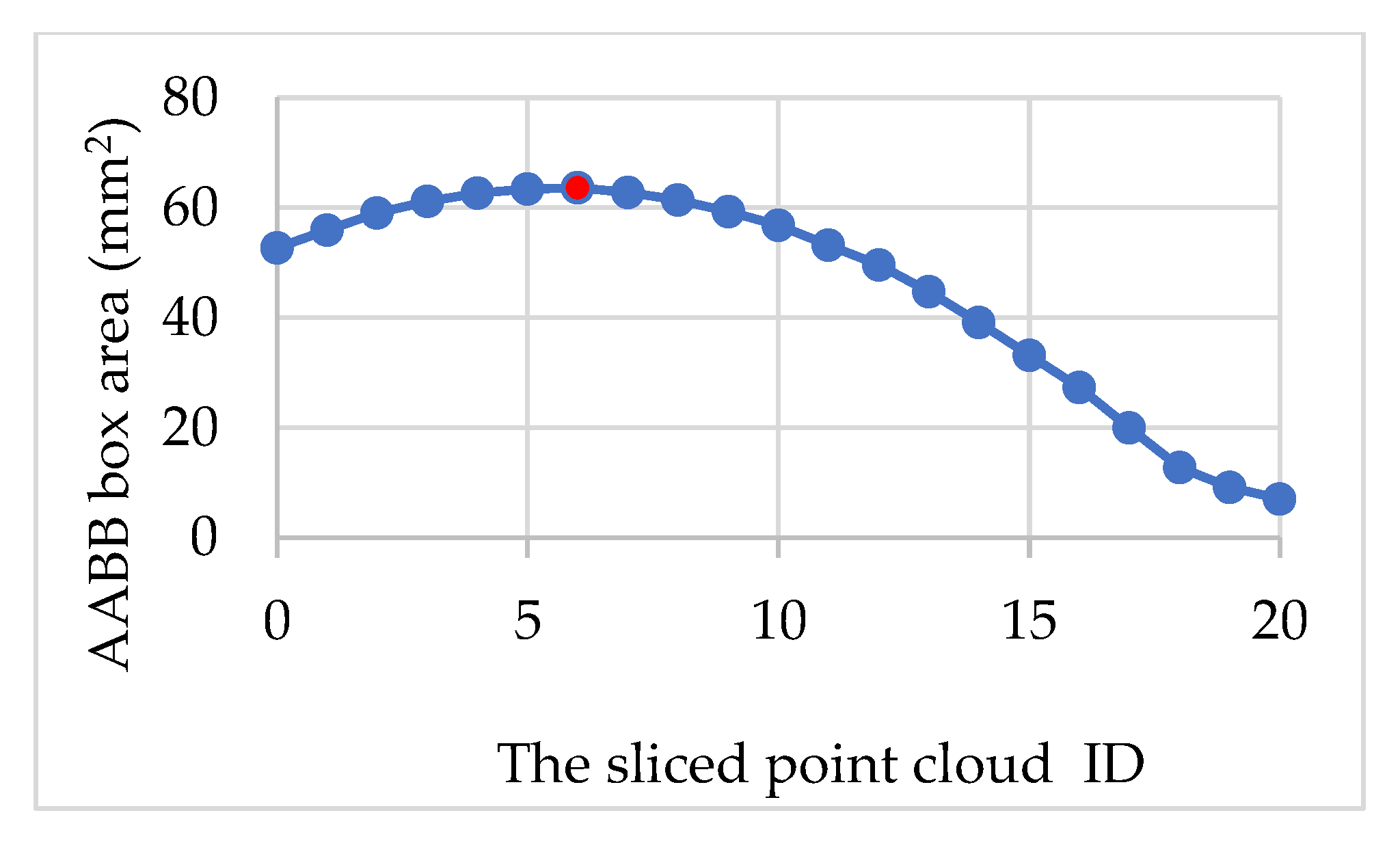
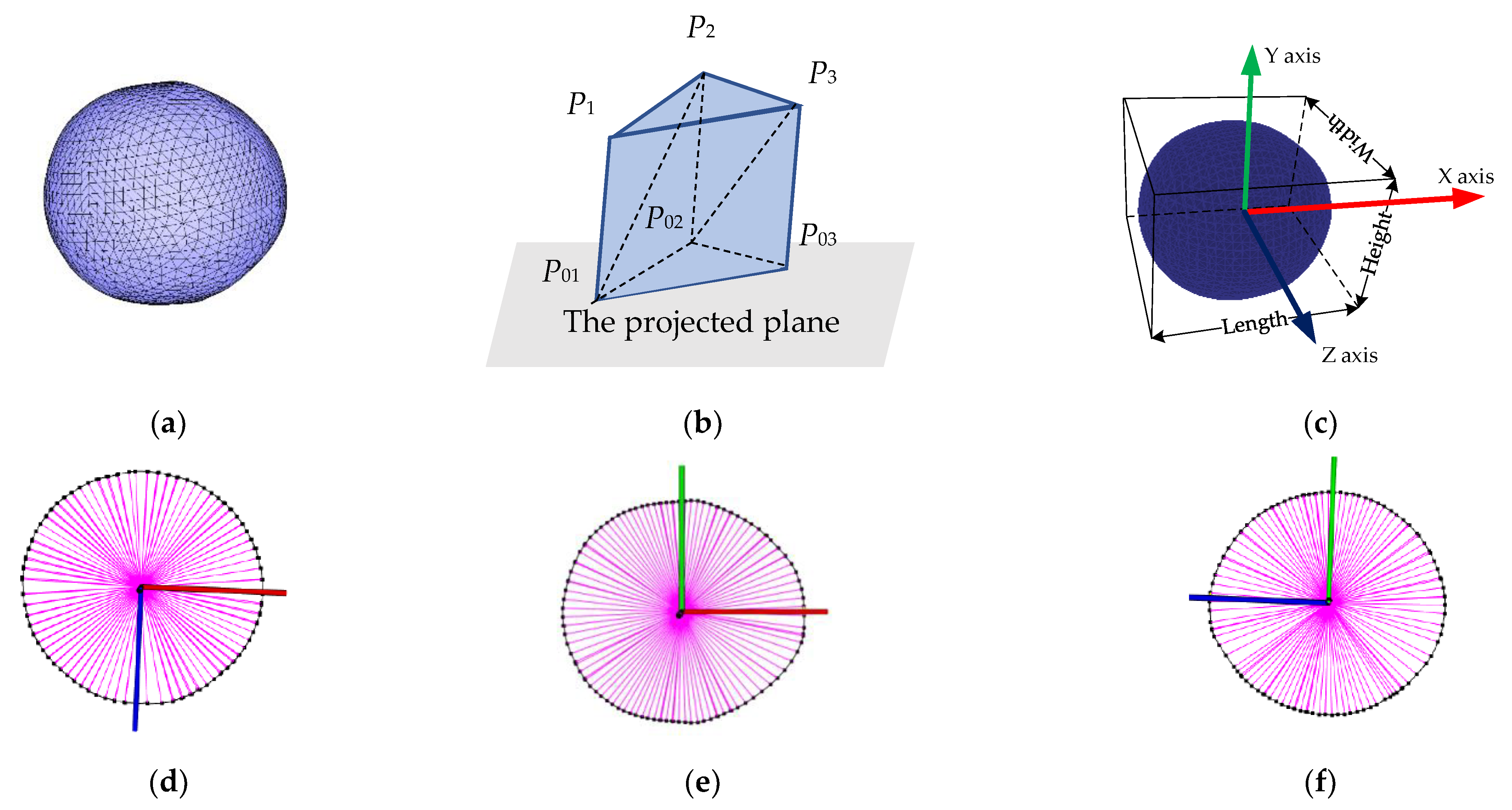
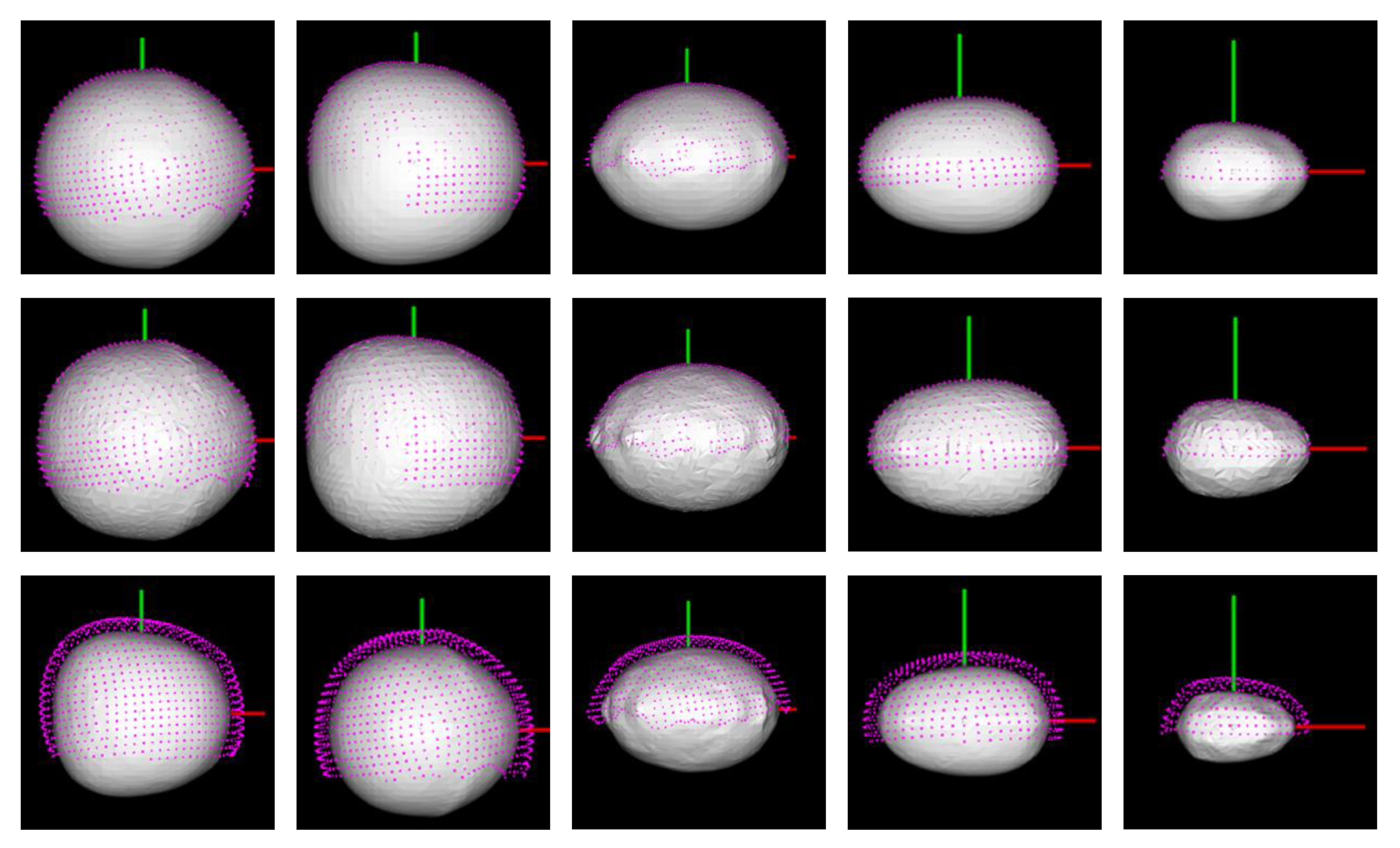
2.2.2. Pose Normalization
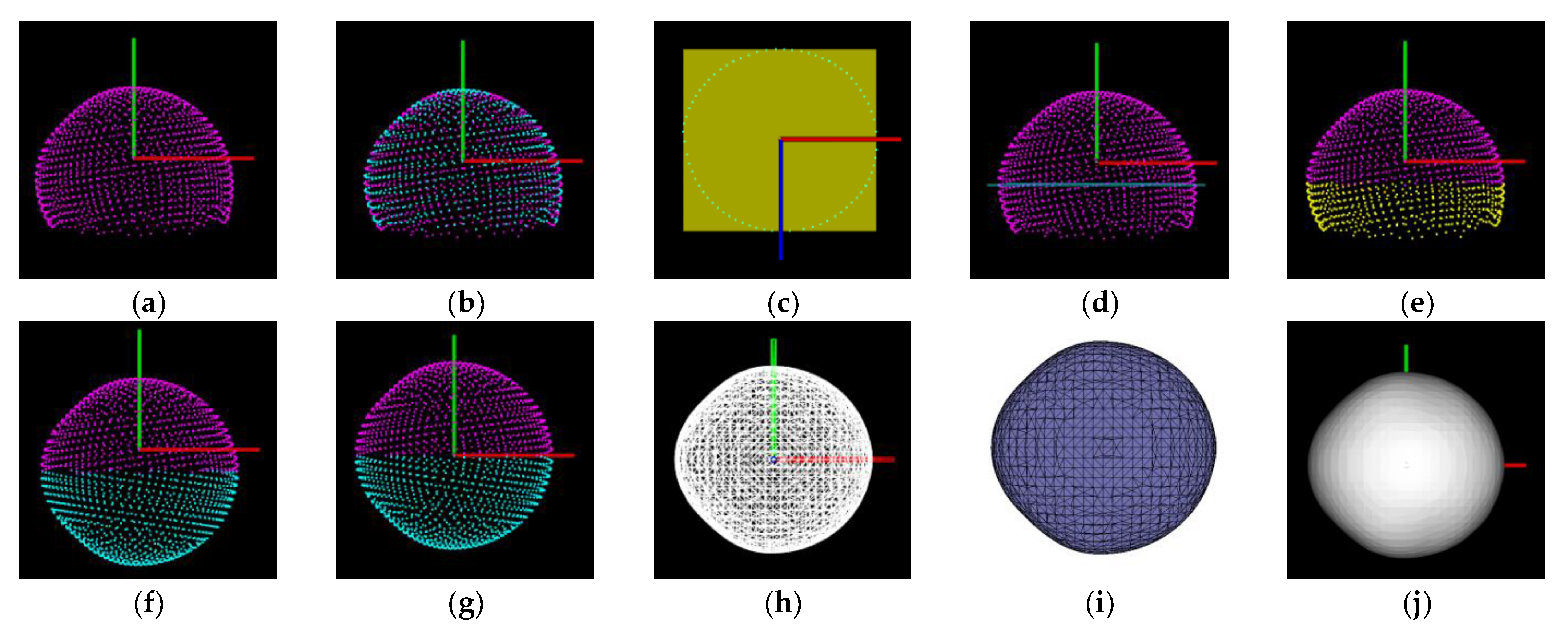
2.2.3. 3D Reconstruction
2.2.4. Trait Estimation
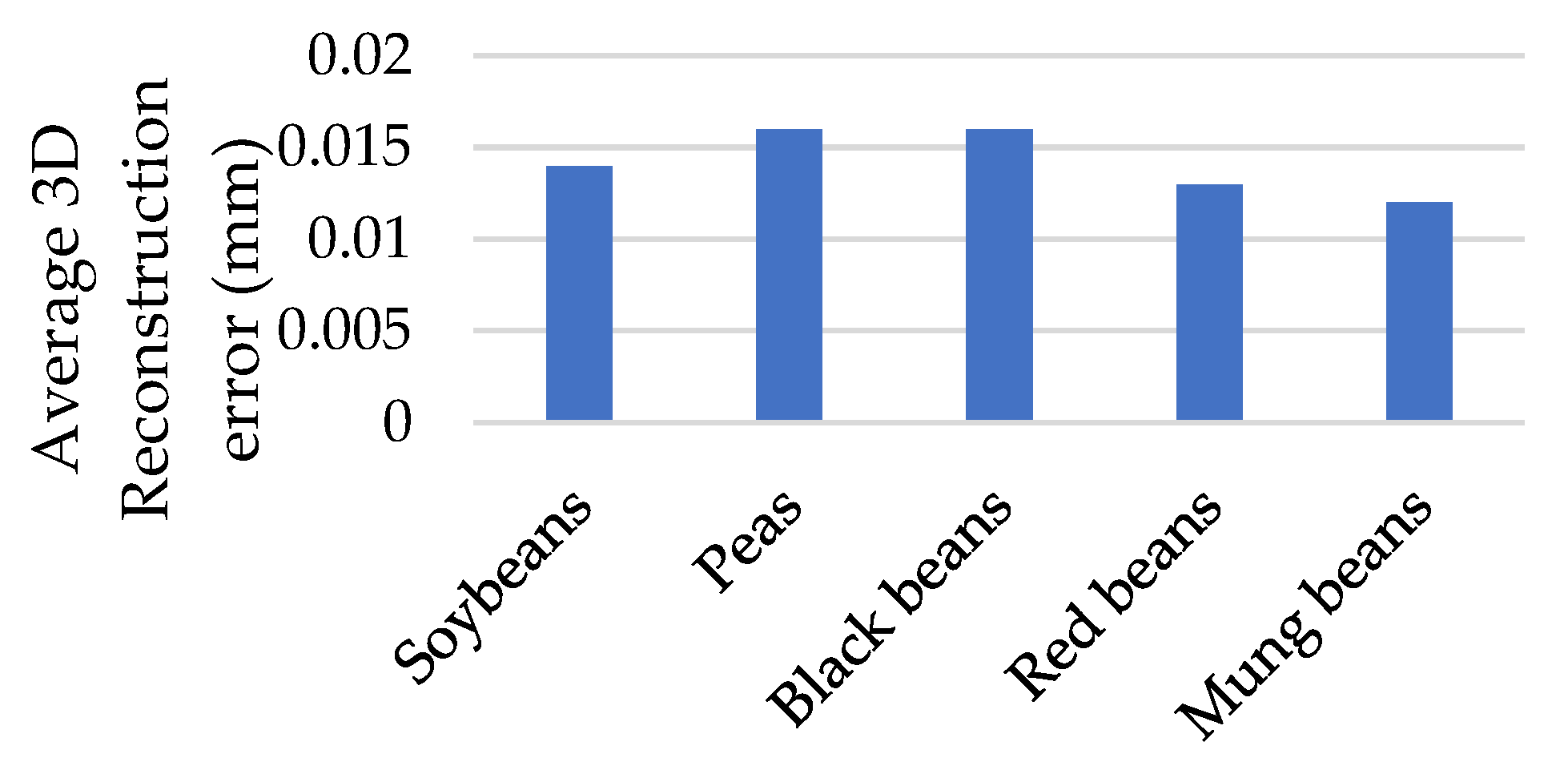
2.3. Accuracy Analysis
3. Results
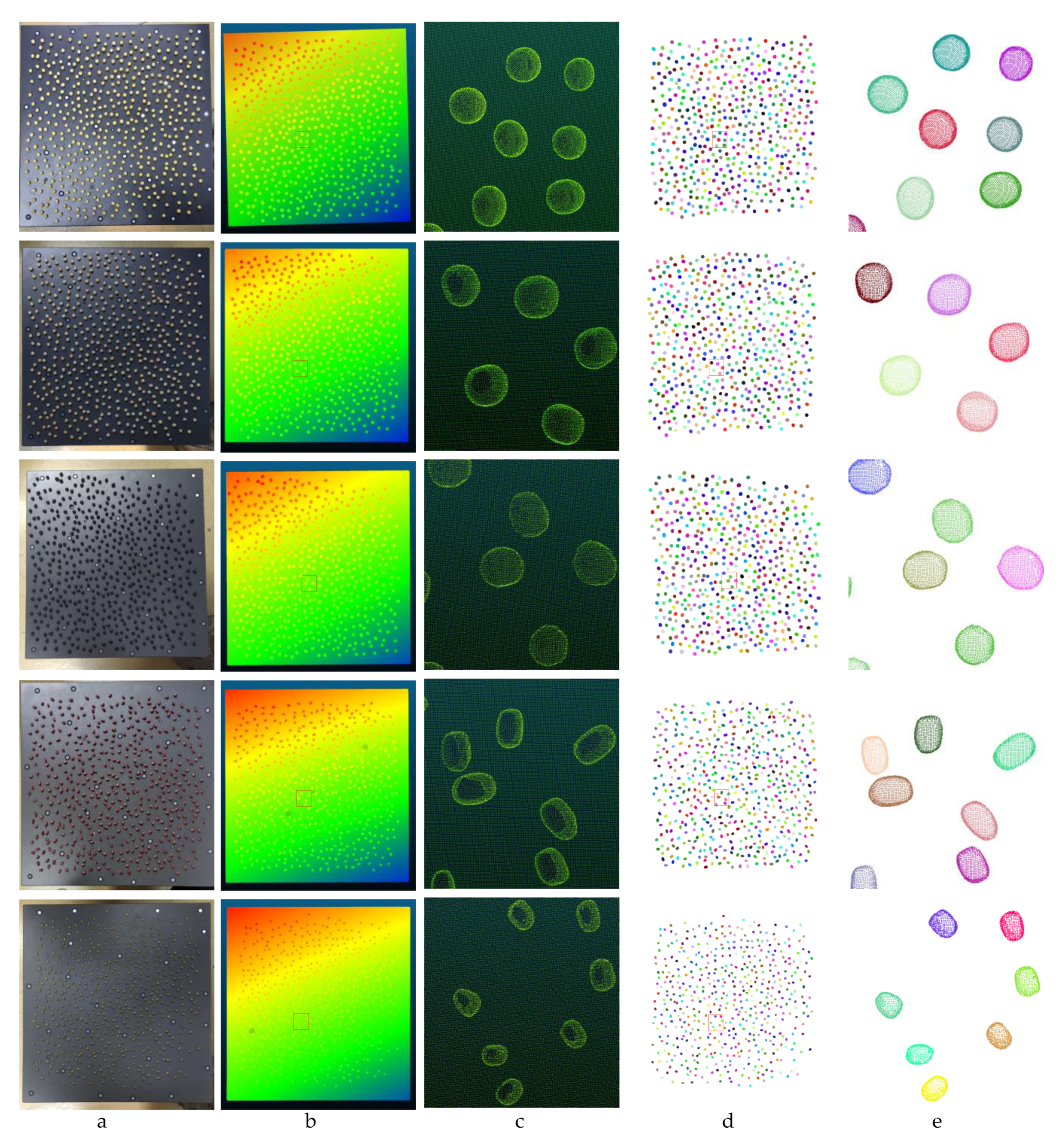
3.1. Visualization of Scanning and Segmentation Results
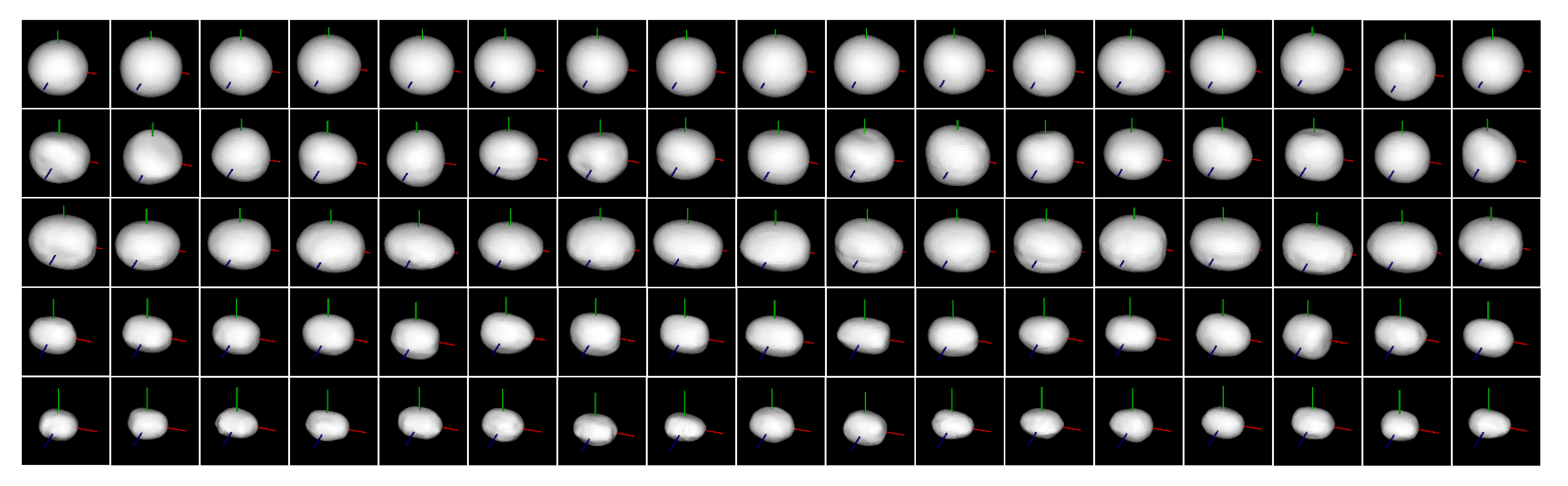
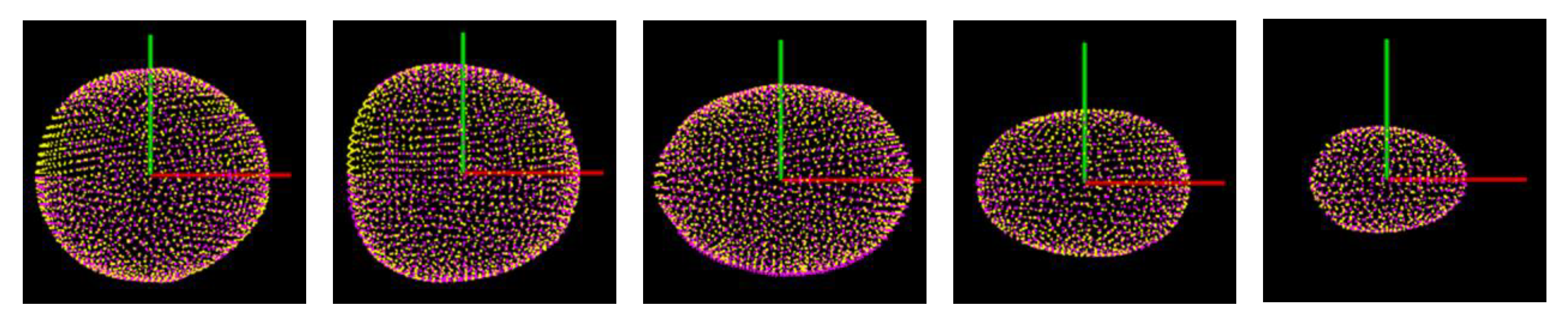
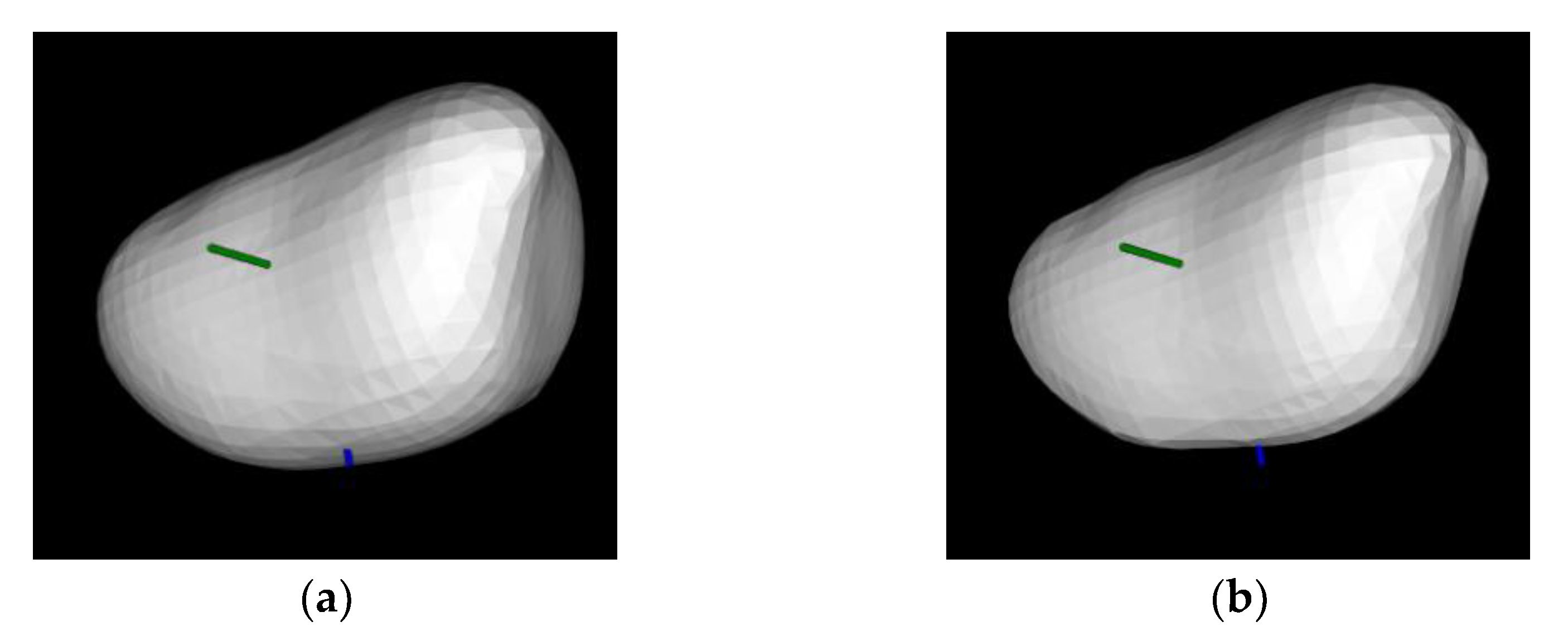
3.2. Visualization of 3D Reconstruction
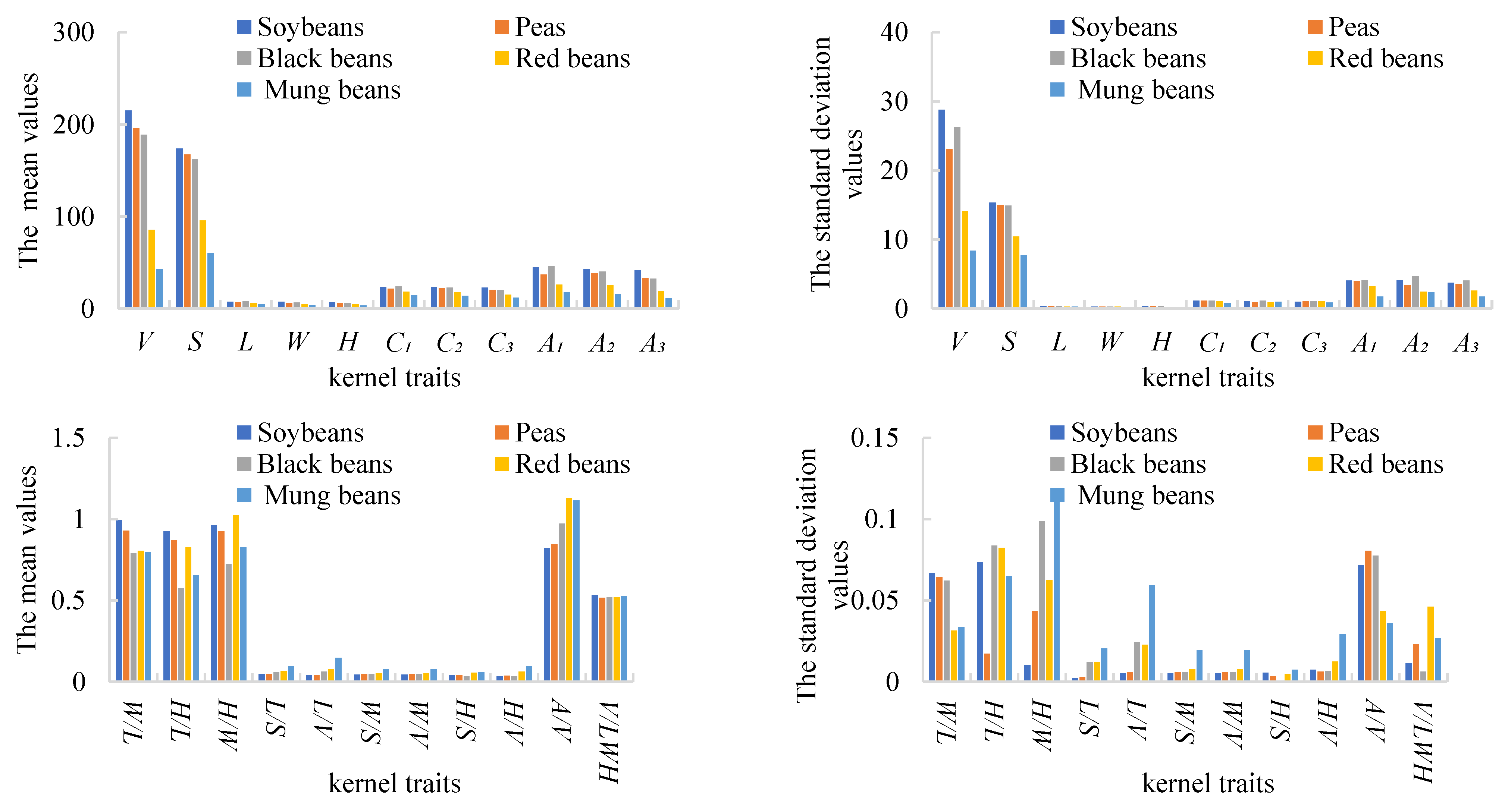
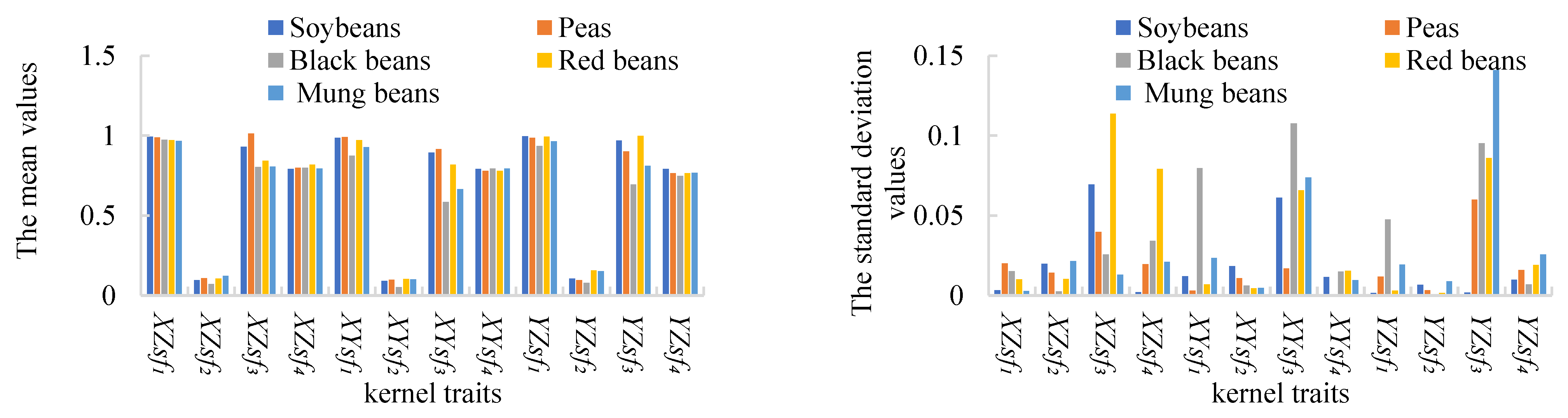
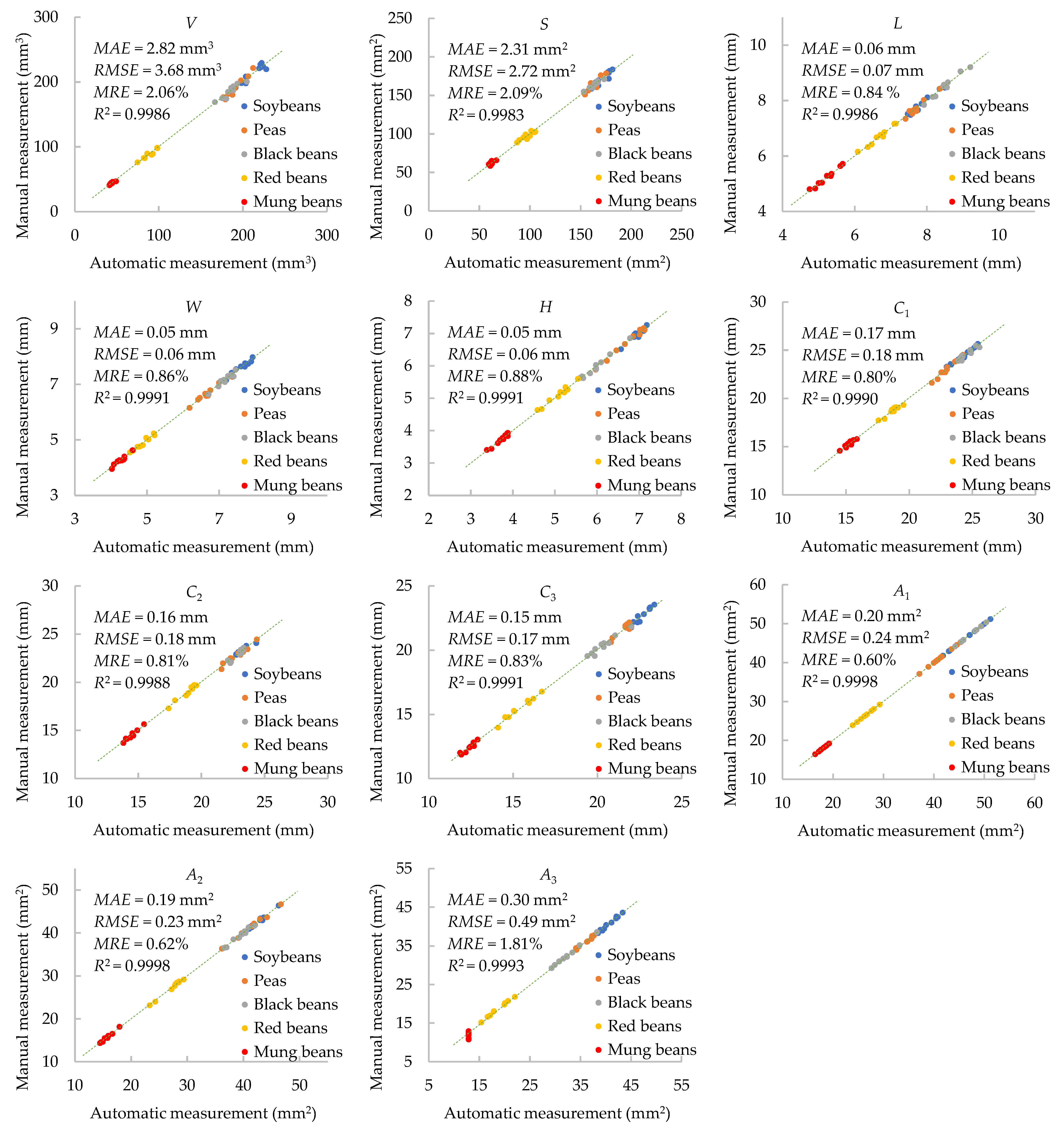
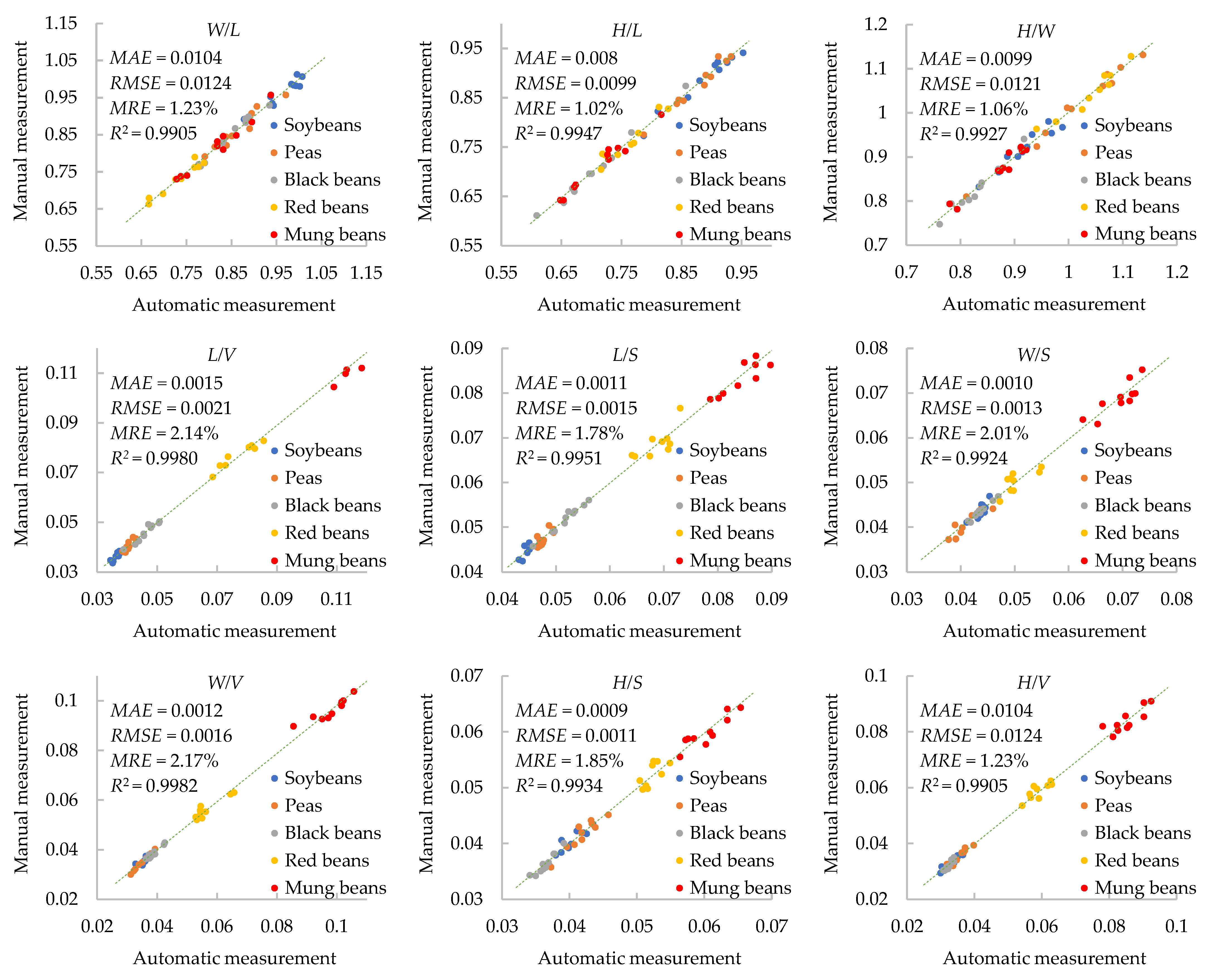
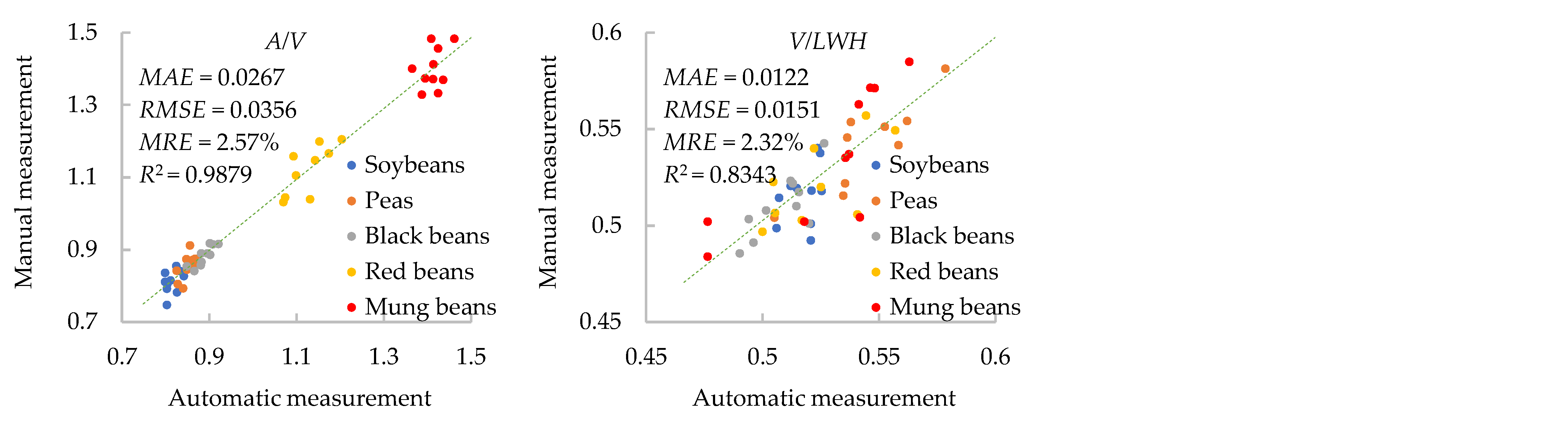
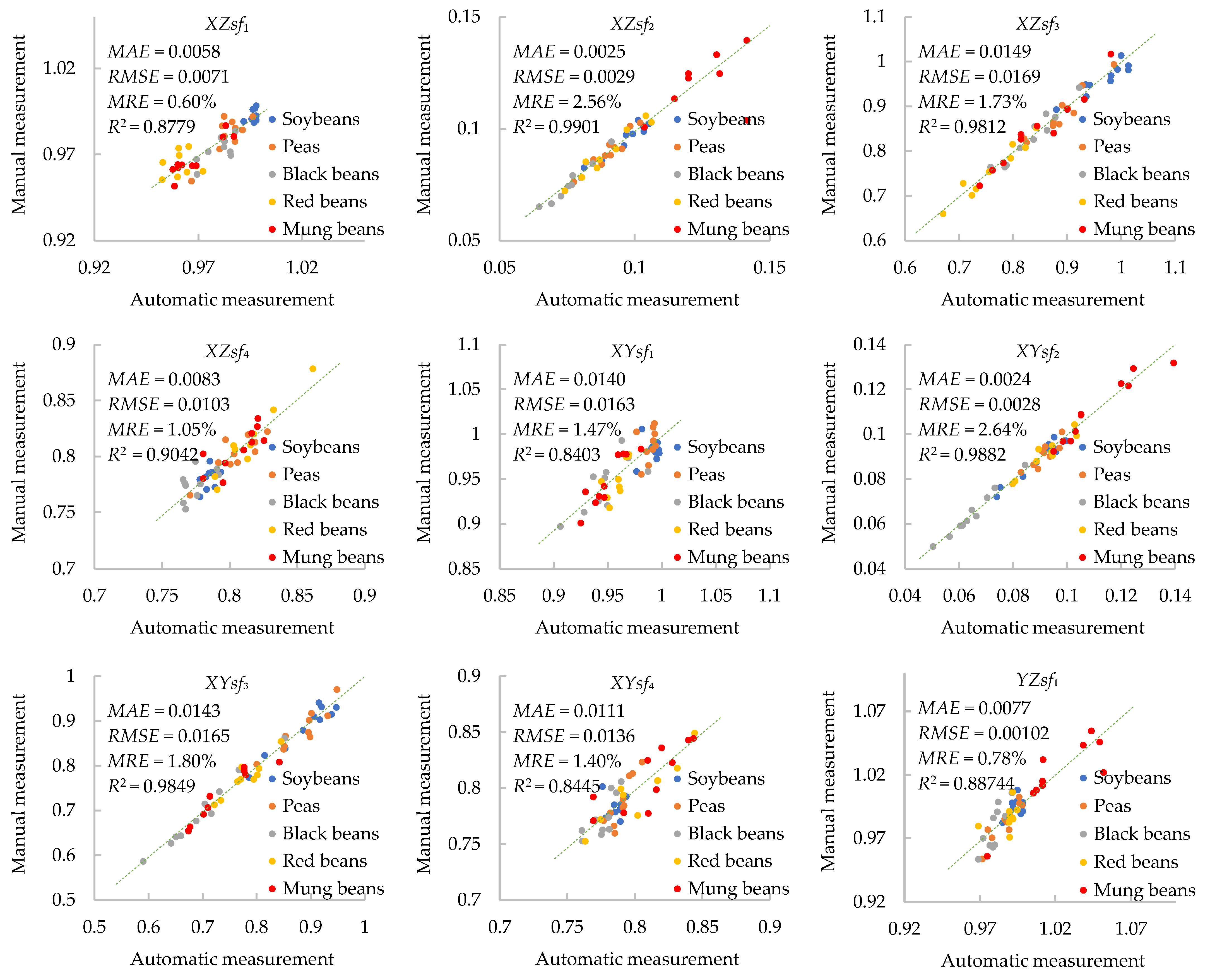
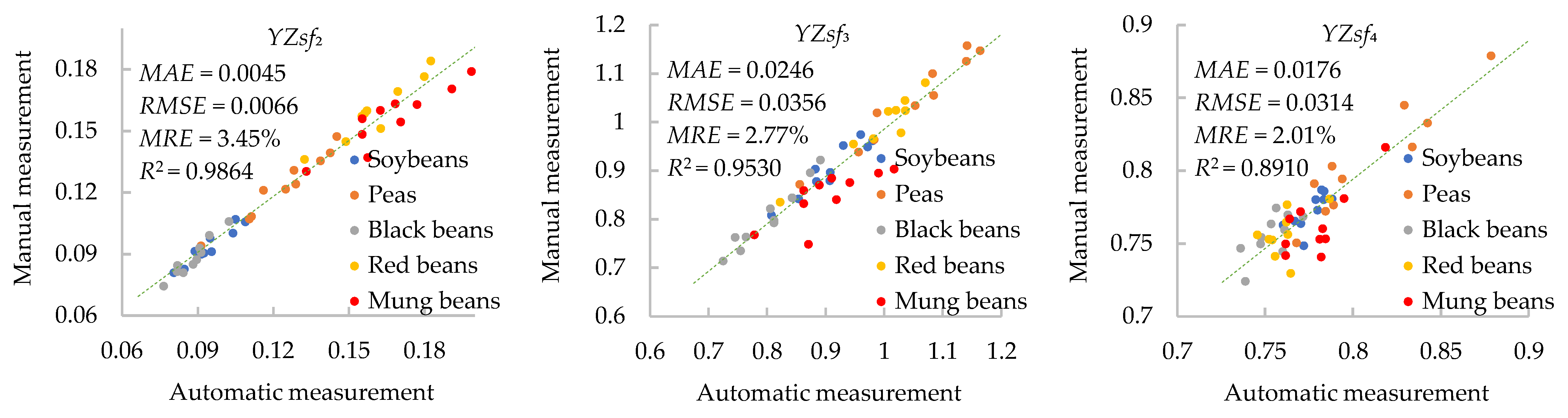
3.3. Results of Trait Estimation
3.4. Time Cost
4. Discussion
4.1. Accuracy of Data Scanning and Segmentation
4.2. Accuracy of 3D Reconstruction
4.3. Comparison of Surface Reconstruction Methods
4.4. Accuracy of Trait Estimation
4.5. Advantages, Limitations, Improvements, and Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


Appendix B


References
- Zhu, X.; Zhao, Z. Measurement and analysis of fluorescent whitening agent content in soybean milk based on image techniques. Measurement 2016, 94, 213–220. [Google Scholar] [CrossRef]
- Sosa, E.F.; Thompson, C.; Chaves, M.G.; Acevedo, B.A.; Avanza, M. V Legume seeds treated by high hydrostatic pressure: Effect on functional properties of flours. Food Bioprocess Technol. 2020, 13, 323–340. [Google Scholar] [CrossRef]
- Mahajan, S.; Das, A.; Sardana, H.K. Image acquisition techniques for assessment of legume quality. Trends Food Sci. Technol. 2015, 42, 116–133. [Google Scholar] [CrossRef]
- Mittal, S.; Dutta, M.K.; Issac, A. Non-destructive image processing based system for assessment of rice quality and defects for classification according to inferred commercial value. Measurement 2019, 148, 106969–106977. [Google Scholar] [CrossRef]
- Afzal, M.; Alghamdi, S.S.; Migdadi, H.H.; Khan, M.A.; Mirza, S.B.; El-Harty, E. Legume genomics and transcriptomics: From classic breeding to modern technologies. Saudi J. Biol. Sci. 2020, 27, 543–555. [Google Scholar] [CrossRef]
- Warman, C.; Sullivan, C.M.; Preece, J.; Buchanan, M.E.; Vejlupkova, Z.; Jaiswal, P.; Fowler, J.E. A cost-effective maize ear phenotyping platform enables rapid categorization and quantification of kernels. Plant J. 2021, 106, 566–579. [Google Scholar] [CrossRef] [PubMed]
- Cao, X.; Yan, H.; Huang, Z.; Ai, S.; Xu, Y.; Fu, R.; Zou, X. A multi-objective particle swarm optimization for trajectory planning of fruit picking manipulator. Agronomy 2021, 11, 2286. [Google Scholar] [CrossRef]
- Wu, F.; Duan, J.; Chen, S.; Ye, Y.; Ai, P.; Yang, Z. Multi-target recognition of bananas and automatic positioning for the inflorescence axis cutting point. Front. Plant Sci. 2021, 12, 1–15. [Google Scholar] [CrossRef]
- Chen, M.; Tang, Y.; Zou, X.; Huang, Z.; Zhou, H.; Chen, S. 3D global mapping of large-scale unstructured orchard integrating eye-in-hand stereo vision and SLAM. Comput. Electron. Agric. 2021, 187, 106237. [Google Scholar] [CrossRef]
- Gu, S.; Liao, Q.; Gao, S.; Kang, S.; Du, T.; Ding, R. Crop water stress index as a proxy of phenotyping maize performance under combined water and salt stress. Remote Sens. 2021, 13, 4710. [Google Scholar] [CrossRef]
- Margapuri, V.; Courtney, C.; Neilsen, M. Image processing for high-throughput phenotyping of seeds. Epic Ser. Comput. 2021, 75, 69–79. [Google Scholar] [CrossRef]
- Herzig, P.; Borrmann, P.; Knauer, U.; Klück, H.-C.; Kilias, D.; Seiffert, U.; Pillen, K.; Maurer, A. Evaluation of RGB and multispectral unmanned aerial vehicle (UAV) imagery for high-throughput phenotyping and yield prediction in barley breeding. Remote Sens. 2021, 13, 2670. [Google Scholar] [CrossRef]
- Mussadiq, Z.; Laszlo, B.; Helyes, L.; Gyuricza, C. Evaluation and comparison of open source program solutions for automatic seed counting on digital images. Comput. Electron. Agric. 2015, 117, 194–199. [Google Scholar] [CrossRef]
- Fıratlıgil-Durmuş, E.; Šárka, E.; Bubník, Z.; Schejbal, M.; Kadlec, P. Size properties of legume seeds of different varieties using image analysis. J. Food Eng. 2010, 99, 445–451. [Google Scholar] [CrossRef]
- Singh, S.K.; Vidyarthi, S.K.; Tiwari, R. Machine learnt image processing to predict weight and size of rice kernels. J. Food Eng. 2020, 274, 109828–109838. [Google Scholar] [CrossRef]
- Igathinathane, C.; Pordesimo, L.O.; Columbus, E.P.; Batchelor, W.D.; Methuku, S.R. Shape identification and particles size distribution from basic shape parameters using ImageJ. Comput. Electron. Agric. 2008, 63, 168–182. [Google Scholar] [CrossRef]
- Carpenter, A.E.; Jones, T.R.; Lamprecht, M.R.; Clarke, C.; Kang, I.H.; Friman, O.; Guertin, D.A.; Chang, J.H.; Lindquist, R.A.; Moffat, J. CellProfiler: Image analysis software for identifying and quantifying cell phenotypes. Genome Biol. 2006, 7, 1–11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dong, R.; Jahufer, M.Z.Z.; Dong, D.K.; Wang, Y.R.; Liu, Z.P. Characterisation of the morphological variation for seed traits among 537 germplasm accessions of common vetch (Vicia sativa L.) using digital image analysis. N. Z. J. Agric. Res. 2016, 59, 422–435. [Google Scholar] [CrossRef]
- Tanabata, T.; Shibaya, T.; Hori, K.; Ebana, K.; Yano, M. SmartGrain: High-throughput phenotyping software for measuring seed shape through image analysis. Plant Physiol. 2012, 160, 1871–1880. [Google Scholar] [CrossRef] [Green Version]
- Faroq, A.-T.; Adam, H.; Dos Anjos, A.; Lorieux, M.; Larmande, P.; Ghesquière, A.; Jouannic, S.; Shahbazkia, H.R. P-TRAP: A panicle trait phenotyping tool. BMC Plant Biol. 2013, 13, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Tang, Y.; Zou, X.; Huang, K.; Huang, Z.; Zhou, H.; Wang, C.; Lian, G. Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 2020, 174, 105508. [Google Scholar] [CrossRef]
- Lin, G.; Tang, Y.; Zou, X.; Xiong, J.; Fang, Y. Color-, depth- and shape-based 3D fruit detection. Precis. Agric. 2020, 21, 1–17. [Google Scholar] [CrossRef]
- Yang, S.; Zheng, L.; Gao, W.; Wang, B.; Hao, X.; Mi, J.; Wang, M. An efficient processing approach for colored point cloud-based high-throughput seedling phenotyping. Remote Sens. 2020, 12, 1540. [Google Scholar] [CrossRef]
- Miao, T.; Zhu, C.; Xu, T.; Yang, T.; Li, N.; Zhou, Y.; Deng, H. Automatic stem-leaf segmentation of maize shoots using three-dimensional point cloud. Comput. Electron. Agric. 2021, 187, 106310. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, X.; Guan, H.; Zhu, K.; Feng, J.; Yu, S. A method for calculating the leaf inclination of soybean canopy based on 3D point clouds. Int. J. Remote Sens. 2021, 42, 5721–5742. [Google Scholar] [CrossRef]
- De Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Height estimation of sugarcane using an unmanned aerial system (UAS) based on structure from motion (SfM) point clouds. Int. J. Remote Sens. 2017, 38, 2218–2230. [Google Scholar] [CrossRef]
- Li, M.; Shamshiri, R.R.; Schirrmann, M.; Weltzien, C. Impact of camera viewing angle for estimating leaf parameters of wheat plants from 3D point clouds. Agriculture 2021, 11, 563. [Google Scholar] [CrossRef]
- Harwin, S.; Lucieer, A.; Osborn, J. The impact of the calibration method on the accuracy of point clouds derived using unmanned aerial vehicle multi-view stereopsis. Remote Sens. 2015, 7, 1933. [Google Scholar] [CrossRef] [Green Version]
- Wen, W.; Guo, X.; Lu, X.; Wang, Y.; Yu, Z. Multi-scale 3D data acquisition of maize. In International Conference on Computer and Computing Technologies in Agriculture; Springer: Berlin/Heidelberg, Germany, 2017; pp. 108–115. [Google Scholar]
- Roussel, J.; Geiger, F.; Fischbach, A.; Jahnke, S.; Scharr, H. 3D surface reconstruction of plant seeds by volume carving: Performance and accuracies. Front. Plant Sci. 2016, 7, 745–758. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Qian, Y.; Cao, P.; Yin, W.; Dai, F.; Hu, F.; Yan, Z. Calculation method of surface shape feature of rice seed based on point cloud. Comput. Electron. Agric. 2017, 142, 416–423. [Google Scholar] [CrossRef]
- Su, Y.; Xiao, L.-T. 3D visualization and volume-based quantification of rice chalkiness in Vivo by using high resolution Micro-CT. Rice 2020, 13, 1–12. [Google Scholar] [CrossRef]
- Cervantes, E.; Martín Gómez, J.J. Seed shape description and quantification by comparison with geometric models. Horticulturae 2019, 5, 60. [Google Scholar] [CrossRef] [Green Version]
- Xu, T.; Yu, J.; Yu, Y.; Wang, Y. A modelling and verification approach for soybean seed particles using the discrete element method. Adv. Powder Technol. 2018, 29, 3274–3290. [Google Scholar] [CrossRef]
- Yang, S.; Zheng, L.; He, P.; Wu, T.; Sun, S.; Wang, M. High-throughput soybean seeds phenotyping with convolutional neural networks and transfer learning. Plant Methods 2021, 17, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Zheng, S.; Gui, L.; Zhao, L.; Ma, H. Automatic extraction of high-throughput phenotypic information of grain based on point cloud. Trans. Chin. Soc. Agric. Mach 2018, 49, 257–264. [Google Scholar]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2007; Volume 26, pp. 214–226. [Google Scholar]
- Nüchter, A.; Rusu, R.B.; Holz, D.; Munoz, D. Semantic perception, mapping and exploration. Robot. Auton. Syst. 2014, 62, 617–618. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2001, 5, 3–55. [Google Scholar] [CrossRef]
- Vranic, D.V.; Saupe, D.; Richter, J. Tools for 3D-object retrieval: Karhunen-Loeve transform and spherical harmonics. In Proceedings of the 2001 IEEE Fourth Workshop on Multimedia Signal Processing, Cannes, France, 3–5 October 2001; pp. 293–298. [Google Scholar]
- JeongHo, B.; Lee, E.; Kim, N.; Kim, S.L.; Choi, I.; Ji, H.; Chung, Y.S.; Choi, M.-S.; Moon, J.-K.; Kim, K.-H. High throughput phenotyping for various traits on soybean seeds using image analysis. Sensors 2020, 20, 248. [Google Scholar] [CrossRef] [Green Version]
- Van den Bergen, G. Efficient collision detection of complex deformable models using AABB trees. J. Graph. Tools 1997, 2, 1–13. [Google Scholar] [CrossRef]
- Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. 2013, 32, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Wang, K.; Huang, C.; Zhang, X.; Yan, J.; Yang, W. A high-throughput maize kernel traits scorer based on line-scan imaging. Measurement 2016, 90, 453–460. [Google Scholar] [CrossRef]
- Hu, W.; Zhang, C.; Jiang, Y.; Huang, C.; Liu, Q.; Xiong, L.; Yang, W.; Chen, F. Nondestructive 3D image analysis pipeline to extract rice grain traits using X-ray computed tomography. Plant Phenomics 2020, 3, 1–12. [Google Scholar] [CrossRef]
- Kumar, M.; Bora, G.; Lin, D. Image processing technique to estimate geometric parameters and volume of selected dry beans. J. Food Meas. Charact. 2013, 7, 81–89. [Google Scholar] [CrossRef]
- Yalçın, İ.; Özarslan, C.; Akbaş, T. Physical properties of pea (Pisum sativum) seed. J. Food Eng. 2007, 79, 731–735. [Google Scholar] [CrossRef]
- Dickerson, M.T.; Drysdale, R.L.S.; McElfresh, S.A.; Welzl, E. Fast greedy triangulation algorithms. Comput. Geom. 1997, 8, 67–86. [Google Scholar] [CrossRef] [Green Version]
- Funkhouser, T.; Min, P.; Kazhdan, M.; Chen, J.; Halderman, A.; Dobkin, D.; Jacobs, D. Marching cubes: A high resolution 3D surface construction algorithm. ACM Trans. Graph. 2003, 22, 83–105. [Google Scholar] [CrossRef]
- Hughes, N.; Askew, K.; Scotson, C.P.; Williams, K.; Sauze, C.; Corke, F.; Doonan, J.H.; Nibau, C. Non-destructive, high-content analysis of wheat grain traits using X-ray micro computed tomography. Plant Methods 2017, 13, 1–16. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Parameters | Types | Parameters |
|---|---|---|---|
| Weight | 1.0 kg | Accuracy | 0.010 mm |
| Volume | 310 × 147 × 80 mm | Field depth | 550 mm |
| Scanning area | 600 × 550 mm | Transfer method | USB 3.0 |
| Speed | 1,050,000 times/s | Work temperatures | −20–40 °C |
| Light | 11 laser crosses (+1 + 5) | Work humidity | 10–90% |
| Light security | ΙΙ | Outputs | Point clouds/3D mesh |
| NO. | Traits | Sym. |
|---|---|---|
| 1 | Volume | V |
| 2 | Surface area | S |
| 3 | Length | L |
| 4 | Width | W |
| 5 | Thickness | H |
| 6 | Horizontal profile perimeter | C1 |
| 7 | Transverse profile perimeter | C2 |
| 8 | Longitudinal profile perimeter | C3 |
| 9 | Horizontal profile cross-section area | A1 |
| 10 | Transverse profile cross-section area | A2 |
| 11 | Longitudinal profile cross-section area | A3 |
| NO. | Scale Factors | NO. | Shape Factors |
|---|---|---|---|
| 1 | W/L | 1 | XZsf1 = 4πA1/C12 |
| 2 | H/L | 2 | XZsf2 = A1/L3 |
| 3 | H/W | 3 | XZsf3 = 4A1/πL2 |
| 4 | L/S | 4 | XZsf4 = A1/LW |
| 5 | L/V | 5 | XYsf1 = 4πA2/C22 |
| 6 | W/S | 6 | XYsf2 = A2/L3 |
| 7 | W/V | 7 | XYsf3 = 4A2/πL2 |
| 8 | H/S | 8 | XYsf4 = A2/LW |
| 9 | H/V | 9 | YZsf1 = 4πA3/C32 |
| 10 | A/V | 10 | YZsf2 = A3/L3 |
| 11 | V/LWH | 11 | YZsf3 = 4A3/πW2 |
| W/L | 12 | YZsf4 = A3/WH |
| Seeds | Points | T_scan | T_p |
|---|---|---|---|
| Soybeans | 2,390,308 | 220 | 20.43 |
| Peas | 2,461,206 | 228 | 20.13 |
| Black beans | 2,307,619 | 234 | 19.98 |
| Red beans | 2,229,617 | 250 | 16.93 |
| Mung beans | 2,150,969 | 265 | 16.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Zheng, S.; Zhu, N. High-Throughput Legume Seed Phenotyping Using a Handheld 3D Laser Scanner. Remote Sens. 2022, 14, 431. https://doi.org/10.3390/rs14020431
Huang X, Zheng S, Zhu N. High-Throughput Legume Seed Phenotyping Using a Handheld 3D Laser Scanner. Remote Sensing. 2022; 14(2):431. https://doi.org/10.3390/rs14020431
Chicago/Turabian StyleHuang, Xia, Shunyi Zheng, and Ningning Zhu. 2022. "High-Throughput Legume Seed Phenotyping Using a Handheld 3D Laser Scanner" Remote Sensing 14, no. 2: 431. https://doi.org/10.3390/rs14020431