
DBSCAN and TD Integrated Wi-Fi Positioning Algorithm

 , ,
, ,
Abstract
:1. Introduction
2. Related Work
3. Basic Algorithm Description
3.1. Research Motivation
3.2. Offline Fingerprint Database Construction
3.3. Position-Domain and Signal-Domain Distances
3.4. Three Signal-Domain Distances
3.5. WKNN Algorithm
3.6. DBSCAN Algorithm
4. The Proposed Algorithm
4.1. Overview
4.2. Fused Distance
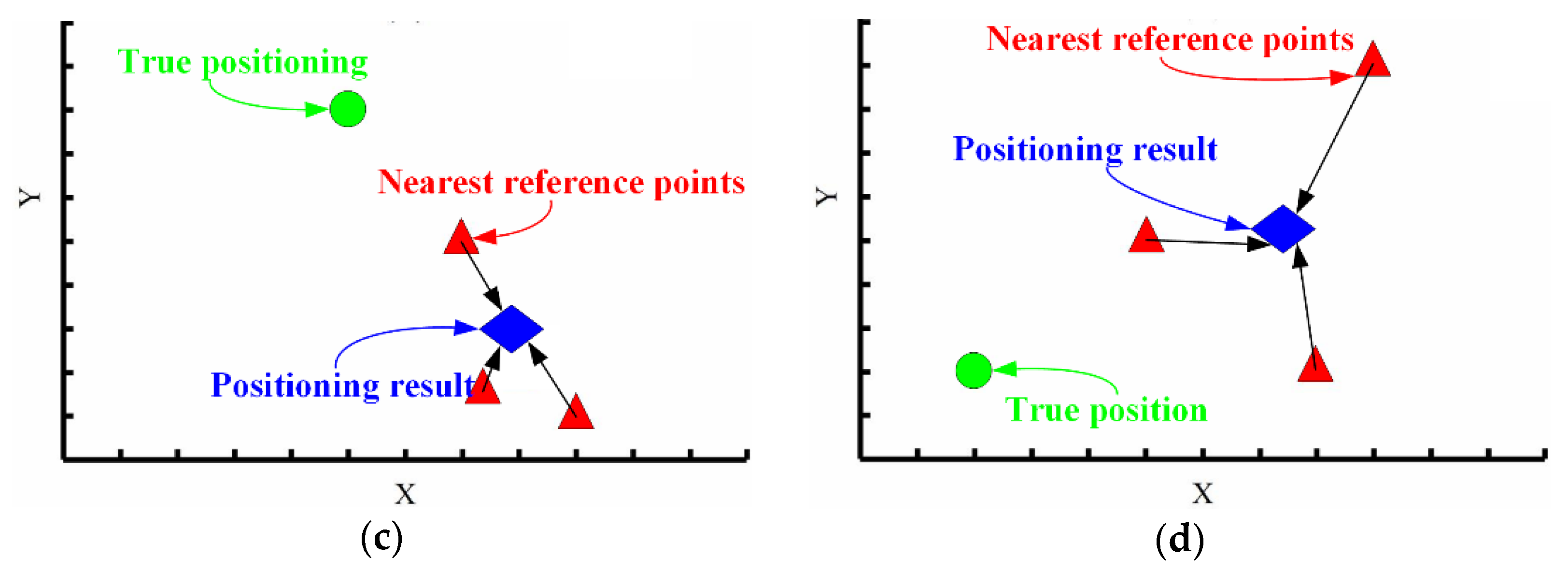
4.3. Description of TD
4.4. DBSCAN and TD Integrated WKNN Algorithm
5. Experiment
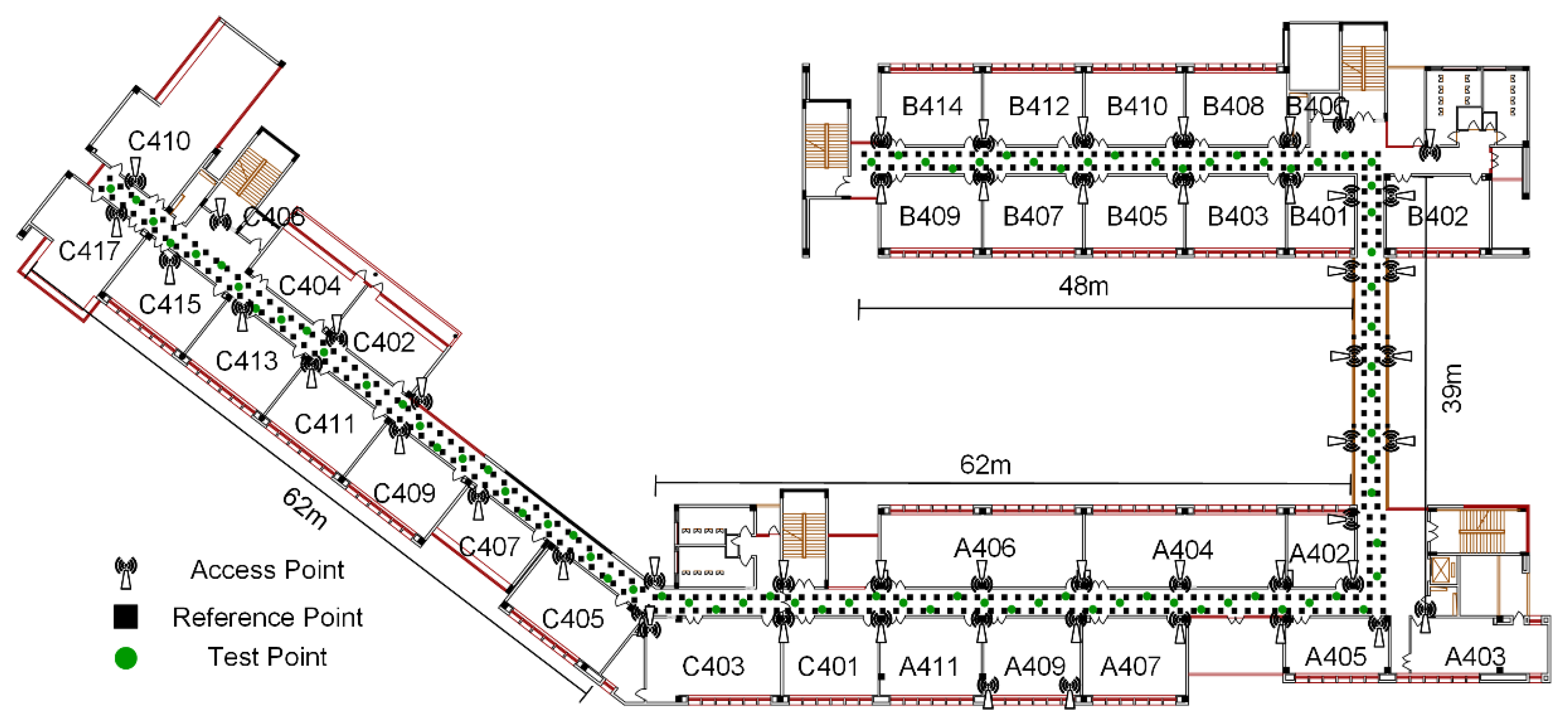
5.1. Experiment Area and Experimental Description
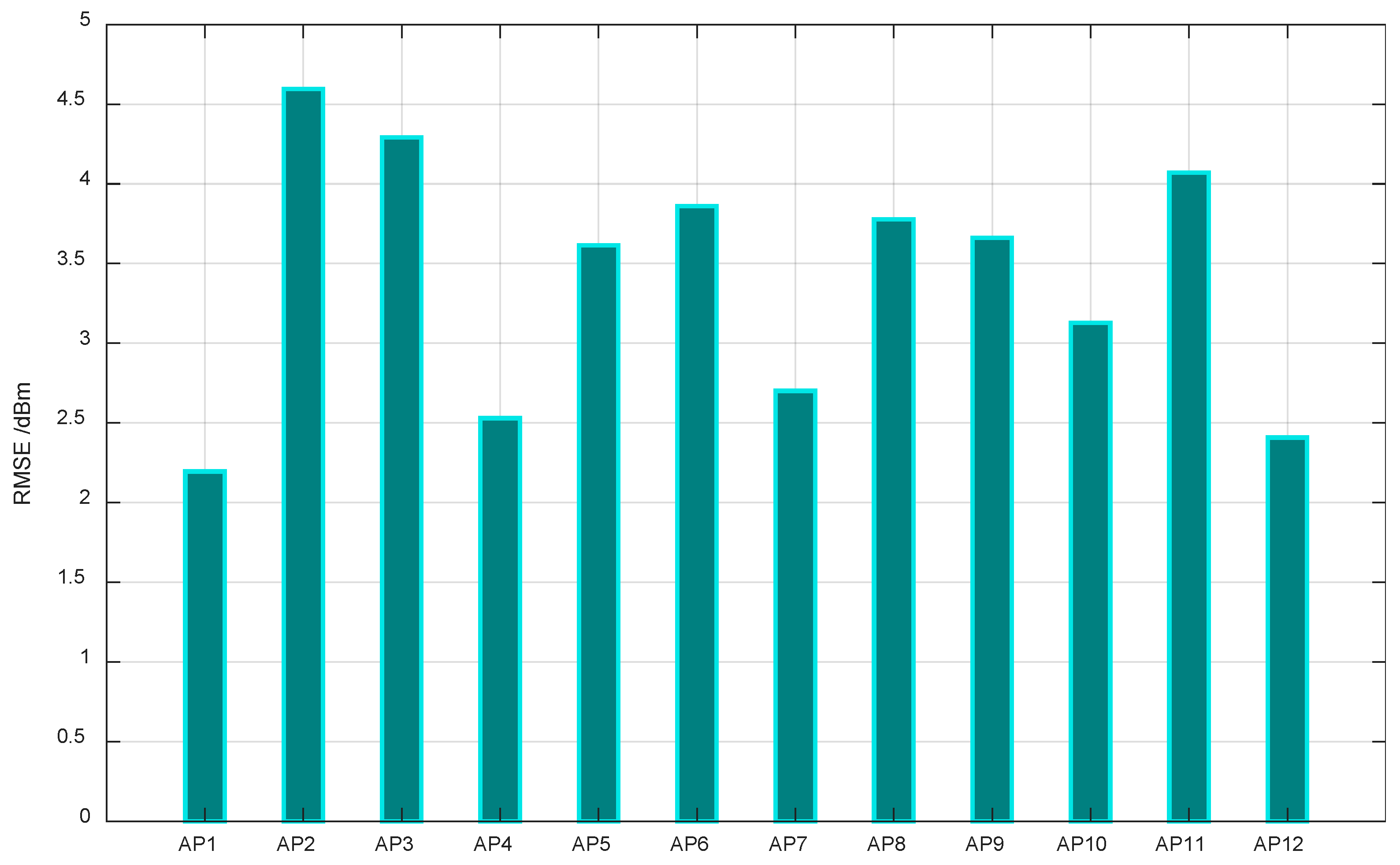
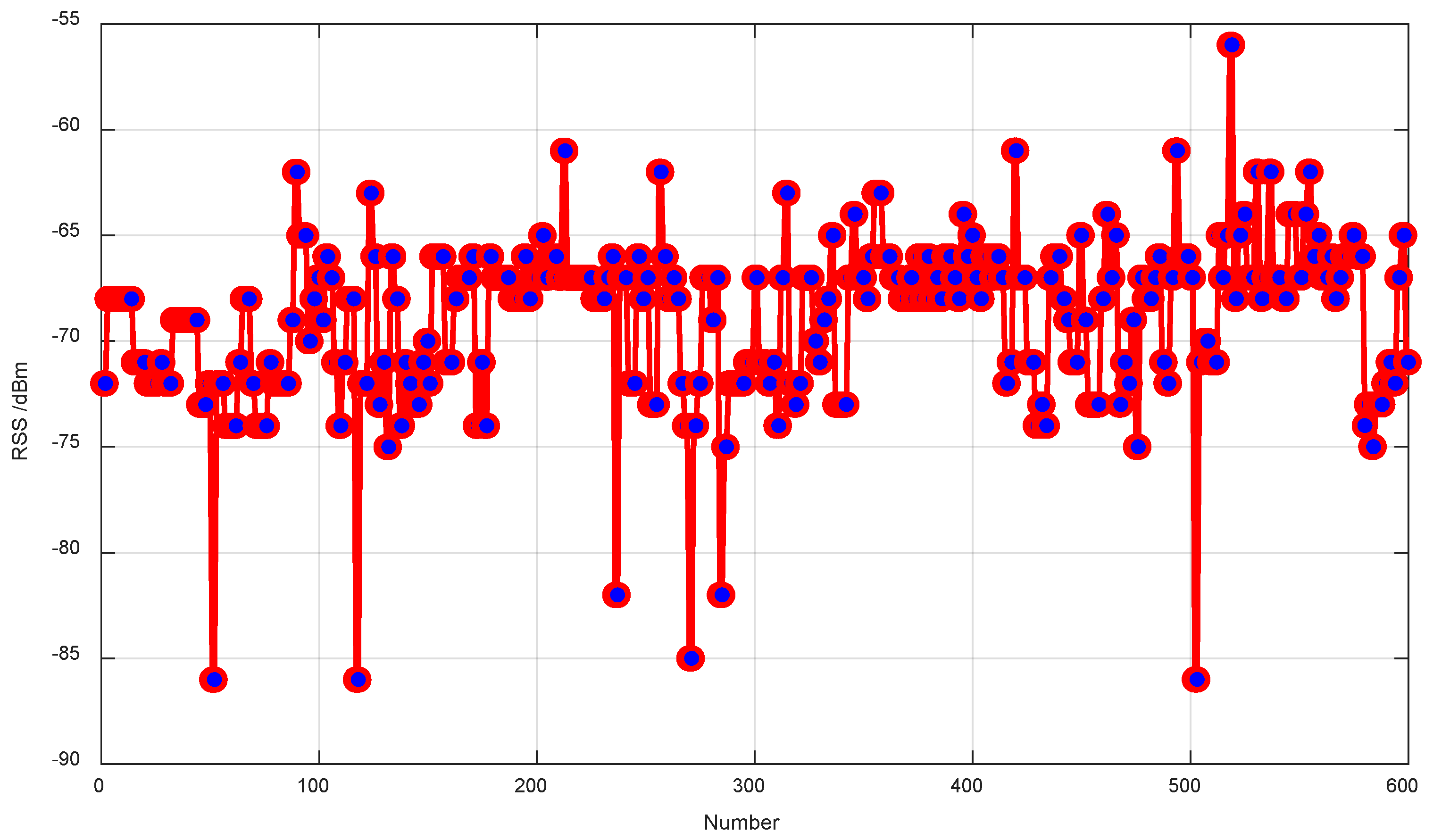
5.2. Stability of RSS Measurement
5.3. Impact of the Number of APs and RPs on Positioning Accuracy
5.4. Differences among ED, MD, and CD
5.5. Positioning Performance by Using TD
5.6. Clustering Effect of DBSCAN
5.7. Performance of the Proposed DBSCAN-TD Integration WKNN Algorithm in Scenario A
5.8. Performance of the Proposed DBSCAN-TD Integration WKNN Algorithm in Scenario B
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- He, Z.; Petovello, M.G.; Pei, L.; Olesen, D.H. Evaluation of GPS/BDS indoor positioning performance and enhancement. Adv. Space Res. 2017, 59, 870–876. [Google Scholar] [CrossRef] [Green Version]
- Ardiansyah, A.; Nugraha, G.D.; Han, H.; Deokjai, C.; Kim, J. A decision tree-based NLOS detection method for the UWB indoor location tracking accuracy improvement. Int. J. Commun. Syst. 2019, 32, e3997. [Google Scholar]
- Poulose, A.; Han, D.S. UWB indoor localization using deep learning LSTM networks. Appl. Sci. 2020, 10, 6290. [Google Scholar] [CrossRef]
- Li, B.; Zhao, K.; Sandoval, E.B. A UWB-Based Indoor Positioning System Employing Neural Networks. J. Geovis. Spat. Anal. 2020, 4, 18. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kroger, T.; Chen, R. Bayesian Fusion for Indoor Positioning Using Bluetooth Fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Poulose, A.; Kim, J.; Han, D.S. A sensor fusion framework for indoor localization using smartphone sensors and Wi-Fi RSSI measurements. Appl. Sci. 2019, 9, 4379. [Google Scholar] [CrossRef] [Green Version]
- Beomju, S.; Jung Ho, L.; Taikjin, L.; Hyung Seok, K. Enhanced Weighted K-Nearest Neighbor Algorithm for Indoor WI-FI Positioning Systems. In Proceedings of the 8th International Conference on Computing Technology and Information Management (NCM and ICNIT), Seoul, Korea, 24–26 April 2012; Volume 2, pp. 574–577. [Google Scholar]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An Improved K-Nearest-Neighbor Indoor Localization Method Based on Spearman Distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Yang, L.T.; Min, C.; Zhao, S.; Guo, M.; Yin, Z. Real-Time Locating Systems Using Active RFID for Internet of Things. IEEE Syst. J. 2017, 10, 1226–1235. [Google Scholar] [CrossRef]
- Yao, C.; Hsia, W. An Indoor Positioning System Based on the Dual-Channel Passive RFID Technology. IEEE Sens. J. 2018, 18, 4654–4663. [Google Scholar] [CrossRef]
- Zhuang, X.; Yu, X.; Zhou, D.; Zhao, Z.; Zhang, W.; Li, L.; Liu, Z. A novel 3D position measurement and structure prediction method for RFID tag group based on deep belief network. Measurement 2019, 136, 25–35. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, R.; Ye, F.; Guo, G.; Li, Z.; Qian, L. Improved TOA Estimation Method for Acoustic Ranging in a Reverberant Environment. IEEE Sens. J. 2020, 1–8. [Google Scholar] [CrossRef]
- Khyam, M.O.; Rahim, M.N.A.; Li, X.; Jayasuriyaet, A.; Mahmud, M.A.; Oo, A.M.T. Simultaneous excitation systems for ultrasonic indoor positioning. IEEE Sens. J. 2020, 20, 13716–13725. [Google Scholar] [CrossRef]
- Ma, Y.; Dou, Z.; Jiang, Q.; Hou, Z. Basmag: An Optimized HMM-Based Localization System Using Backward Sequences Matching Algorithm Exploiting Geomagnetic Information. IEEE Sens. J. 2016, 16, 7472–7482. [Google Scholar] [CrossRef]
- Gao, Y. An Improved Particle Filter Algorithm for Geomagnetic Indoor Positioning. J. Sens. 2018, 2018, 5989678. [Google Scholar]
- Fujii, K.; Yonezawa, R.; Sakamoto, Y.; Schmitz, A.; Sugano, S. A Combined Approach of Doppler and Carrier-Based Hyperbolic Positioning with a Multi-Channel GPS-Pseudolite for Indoor Localization of Robots. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Madrid, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar]
- Li, X.; Zhang, P.; Huang, G.; Zhang, Q.; Zhao, Q. Performance analysis of indoor pseudolite positioning based on the unscented Kalman filter. GPS Solut. 2019, 23, 79. [Google Scholar] [CrossRef]
- Xiao, A.; Ruizhi, C.; Deren, L.; Yujin, C.; Dewen, W. An Indoor Positioning System Based on Static Objects in Large Indoor Scenes by Using Smartphone Cameras. Sensors 2018, 18, 2229. [Google Scholar] [CrossRef] [Green Version]
- Yao, G.; Yilmaz, A.; Zhang, L.; Meng, F.; Ai, H.; Jin, F. Matching Large Baseline Oblique Stereo Images Using an End-To-End Convolutional Neural Network. Remote Sens. 2021, 13, 274. [Google Scholar] [CrossRef]
- Zhang, Y.; Tan, X.; Zhao, C. UWB/INS integrated pedestrian positioning for robust indoor environments. IEEE Sens. J. 2020, 20, 14401–14409. [Google Scholar] [CrossRef]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An indoor position-estimation algorithm using smartphone IMU sensor data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera. Sensors 2019, 19, 5084. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Wang, Y.; Xu, S.; Qi, H.; Hu, X. Indoor positioning tightly coupled Wi-Fi FTM ranging and PDR based on the extended Kalman filter for smartphones. IEEE Access 2020, 8, 49671–49684. [Google Scholar] [CrossRef]
- Li, C.; Zhen, J.; Chang, K.; Xu, A.; Zhu, H.; Wu, J. An Indoor Positioning and Tracking Algorithm Based on Angle-of-Arrival Using a Dual-Channel Array Antenna. Remote Sens. 2021, 13, 4301. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Performance Analysis of Fingerprint Matching Algorithms for Indoor Localization. In Proceedings of the International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Fukuoka, Japan, 19–21 February 2020; pp. 661–665. [Google Scholar]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Feng, X.; Nguyen, K.A.; Luo, Z. A survey of deep learning approaches for WiFi-based indoor positioning. J. Inf. Telecommun. 2021, 1–54. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Torres-Sospedra, J.; Huerta, J. A meta-review of indoor positioning systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the IEEE INFOCOM, Tel Aviv, Israel, 6 August 2000; Volume 2, pp. 775–784. [Google Scholar]
- Oh, J.; Kim, J. Adaptive K-nearest neighbour algorithm for WiFi fingerprint positioning. ICT Express 2018, 4, 91–94. [Google Scholar] [CrossRef]
- Xie, H.; Gu, T.; Tao, X.; Ye, H.; Lv, J. MaLoc: A Practical Magnetic Fingerprinting Approach to Indoor Localization Using Smartphones. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing, Seattle, WA, USA, 13–17 September 2014; pp. 243–253. [Google Scholar]
- Tian, Z.; Tang, X.; Zhou, M.; Tan, Z. Fingerprint indoor positioning algorithm based on affinity propagation clustering. Eurasip J. Wirel. Commun. Netw. 2013, 2013, 272. [Google Scholar] [CrossRef] [Green Version]
- Sharp, I.; Yu, K. Enhanced Least-Squares Positioning Algorithm for Indoor Positioning. IEEE Trans. Mob. Comput. 2013, 12, 1640–1650. [Google Scholar] [CrossRef]
- Wu, G.; Tseng, P. A Deep Neural Network-Based Indoor Positioning Method using Channel State Information. In Proceedings of the International Conference on Computing, Networking and Communications (ICNC), Maui, HI, USA, 5–8 March 2018; pp. 290–294. [Google Scholar]
- Chu, C.; Yang, S. A Particle Filter Based Reference Fingerprinting Map Recalibration Method. IEEE Access 2019, 7, 111813–111827. [Google Scholar] [CrossRef]
- Minaev, G.; Visa, A.; Piche, R. Comprehensive survey of similarity measures for ranked based location fingerprinting algorithm. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–4. [Google Scholar]
- Torres-Sospedra, J.; Montoliu, R.; Trilles, S.; Belmonte, S.; Huerta, J. Comprehensive Analysis of Distance and Similarity Measures for Wi-Fi Fingerprinting Indoor Positioning Systems. Expert Syst. Appl. 2015, 42, 9263–9278. [Google Scholar] [CrossRef]
- Lohan, E.S.; Torres-Sospedra, J.; Leppäkoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi Crowdsourced Fingerprinting Dataset for Indoor Positioning. Data 2017, 2, 32. [Google Scholar] [CrossRef] [Green Version]
- Seong, J.-H.; Seo, D.-H. Wi-Fi fingerprint using radio map model based on MDLP and euclidean distance based on the Chi squared test. Wirel. Netw. 2019, 25, 3019–3027. [Google Scholar] [CrossRef]
- Jung, H.Y.; Yong, S.H. Fingerprint Liveness Map Construction Using Convolutional Neural Network. Electron. Lett. 2018, 54, 564–566. [Google Scholar] [CrossRef]
- Yiu, S.; Yang, K. Gaussian Process Assisted Fingerprinting Localization. IEEE Internet Things J. 2016, 3, 683–690. [Google Scholar] [CrossRef]
- Cao, H.; Wang, Y.; Bi, J.; Xu, S.; Qi, H.; Si, M.; Yao, G. WiFi RTT Indoor Positioning Method Based on Gaussian Process Regression for Harsh Environments. IEEE Access 2020, 8, 215777–215786. [Google Scholar] [CrossRef]
- Song, X.; Fan, X.; Xiang, C.; Ye, Q.; Liu, L.; Wang, Z.; He, X.; Yang, N.; Fang, G. A novel convolutional neural network based indoor localization framework with WiFi fingerprinting. IEEE Access 2019, 7, 110698–110709. [Google Scholar] [CrossRef]
- Zhang, J.; Lyu, Y.; Patton, J.; Periaswamy, S.C.G.; Roppel, T. BFVP: A Probabilistic UHF RFID Tag Localization Algorithm Using Bayesian Filter and a Variable Power RFID Model. IEEE Trans. Ind. Electron. 2018, 65, 8250–8825. [Google Scholar] [CrossRef]
- Li, B.; Dempster, A.G.; Barnes, J.; Rizos, C.; Li, D. Probabilistic Algorithm to Support the Fingerprinting Method for CDMA Location. In Proceedings of the International Symposium on GPS/GNSS, Hong Kong, China, 8–10 December 2005; pp. 8–10. [Google Scholar]
- Sangeetha, S.; Radha, N. A New Framework for IRIS and Fingerprint Recognition Using SVM Classification and Extreme Learning Machine Based on Score Level Fusion. In Proceedings of the 7th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 4–5 January 2013; pp. 183–188. [Google Scholar]
- Torres-Sospedra, J.; Moreira, A.; Knauth, S.; Berkvens, R.; Montoliu, R.; Belmonte Fernández, O.; Trilles Oliver, S.; Nicolau, M.; Meneses, F.; Costa, A.; et al. A realistic evaluation of indoor positioning systems based on Wi-Fi fingerprinting: The 2015 EvAAL–ETRI competition. J. Ambient Intell. Smart Environ. 2017, 9, 263–279. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.U.; Hur, S.; Park, S.; Park, Y. Harvesting Indoor Positioning Accuracy by Exploring Multiple Features from Received Signal Strength Vector. IEEE Access 2019, 7, 52110–52121. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of fingerprints for indoor WiFi localization based on Gaussian process regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Gowda, K.C.; Krishna, G. Agglomerative clustering using the concept of mutual nearest neighbourhood. Pattern Recognit. 1978, 10, 105–112. [Google Scholar] [CrossRef]
- Chen, G.; Liu, Q.; Wei, Y.; Yu, Q. An Efficient Indoor Location System in WLAN Based on Database Partition and Euclidean Distance-Weighted Pearson Correlation Coefficient. In Proceedings of the 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 1736–1741. [Google Scholar]
- Retscher, G.; Joksch, J. Comparison of Different Vector Distance Measure Calculation Variants for Indoor Location Fingerprinting. In Proceedings of the 13th International Conference on Location-Based Services, Vienna, Austria, 14–16 November 2016; pp. 53–76. [Google Scholar]
- Pu, Y.-C.; You, P.-C. Indoor positioning system based on BLE location fingerprinting with classification approach. Appl. Math. Model. 2018, 62, 654–663. [Google Scholar] [CrossRef]
- Li, C.; Qiu, Z.; Liu, C. An Improved Weighted K-Nearest Neighbor Algorithm for Indoor Positioning. Wirel. Pers. Commun. 2017, 96, 2239–2251. [Google Scholar] [CrossRef]
- Marques, N.; Meneses, F.; Moreira, A. Combining Similarity Functions and Majority Rules for Multi-Building, Multi-Floor, WiFi Positioning. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Farshad, A.; Jiwei, L.; Marina, M.K.; Garcia, F.J. A Microscopic Look at WiFi Fingerprinting for Indoor Mobile Phone Localization in Diverse Environments. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Bi, J.; Wang, Y.; Li, X.; Cao, H.; Qi, H.; Wang, Y. A novel method of adaptive weighted K-nearest neighbor fingerprint indoor positioning considering user’s orientation. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718785885. [Google Scholar] [CrossRef]
- Zhou, H.; Van, N.N. Indoor Fingerprint Localization Based on Fuzzy C-Means Clustering. In Proceedings of the Sixth International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 10–11 January 2014; pp. 337–340. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the International Conference on Knowledge Discovery and Data Mining (KDD-96), Portland, OR, USA, 2–4 August 1996; Volume 14, pp. 226–231. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Id | Location | ||||||
|---|---|---|---|---|---|---|---|
| 1 | |||||||
| 2 | |||||||
| M |
| Number of RPs | MAE (m) |
|---|---|
| 352 | 3.011 |
| 126 | 4.017 |
| 62 | 3.636 |
| 36 | 5.096 |
| Algorithm | Maximum Error | MAE | RMSE |
|---|---|---|---|
| SVM | 9.562 | 5.077 | 5.734 |
| GPR | 8.729 | 4.313 | 4.835 |
| Rank | 9.737 | 4.979 | 5.607 |
| Proposed algorithm | 8.256 | 3.721 | 4.227 |
| Algorithm | 50% Error | 70% Error | 90% Error | MAE | RMSE |
|---|---|---|---|---|---|
| SVM | 3.215 | 4.238 | 7.414 | 3.820 | 4.735 |
| GPR | 3.127 | 4.095 | 6.328 | 3.630 | 4.583 |
| Rank | 4.515 | 6.208 | 11.407 | 5.293 | 6.753 |
| Proposed algorithm | 1.754 | 2.636 | 3.970 | 2.094 | 2.638 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bi, J.; Cao, H.; Wang, Y.; Zheng, G.; Liu, K.; Cheng, N.; Zhao, M. DBSCAN and TD Integrated Wi-Fi Positioning Algorithm. Remote Sens. 2022, 14, 297. https://doi.org/10.3390/rs14020297
Bi J, Cao H, Wang Y, Zheng G, Liu K, Cheng N, Zhao M. DBSCAN and TD Integrated Wi-Fi Positioning Algorithm. Remote Sensing. 2022; 14(2):297. https://doi.org/10.3390/rs14020297
Chicago/Turabian StyleBi, Jingxue, Hongji Cao, Yunjia Wang, Guoqiang Zheng, Keqiang Liu, Na Cheng, and Meiqi Zhao. 2022. "DBSCAN and TD Integrated Wi-Fi Positioning Algorithm" Remote Sensing 14, no. 2: 297. https://doi.org/10.3390/rs14020297