
A Novel Algorithm Modelling for UWB Localization Accuracy in Remote Sensing

Abstract
:
1. Introduction
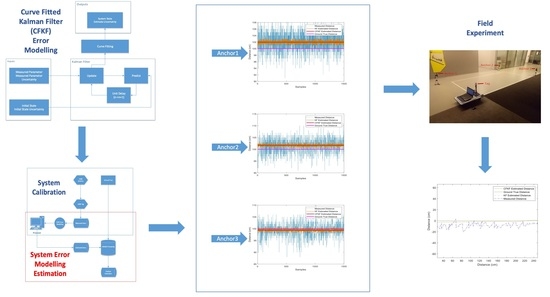
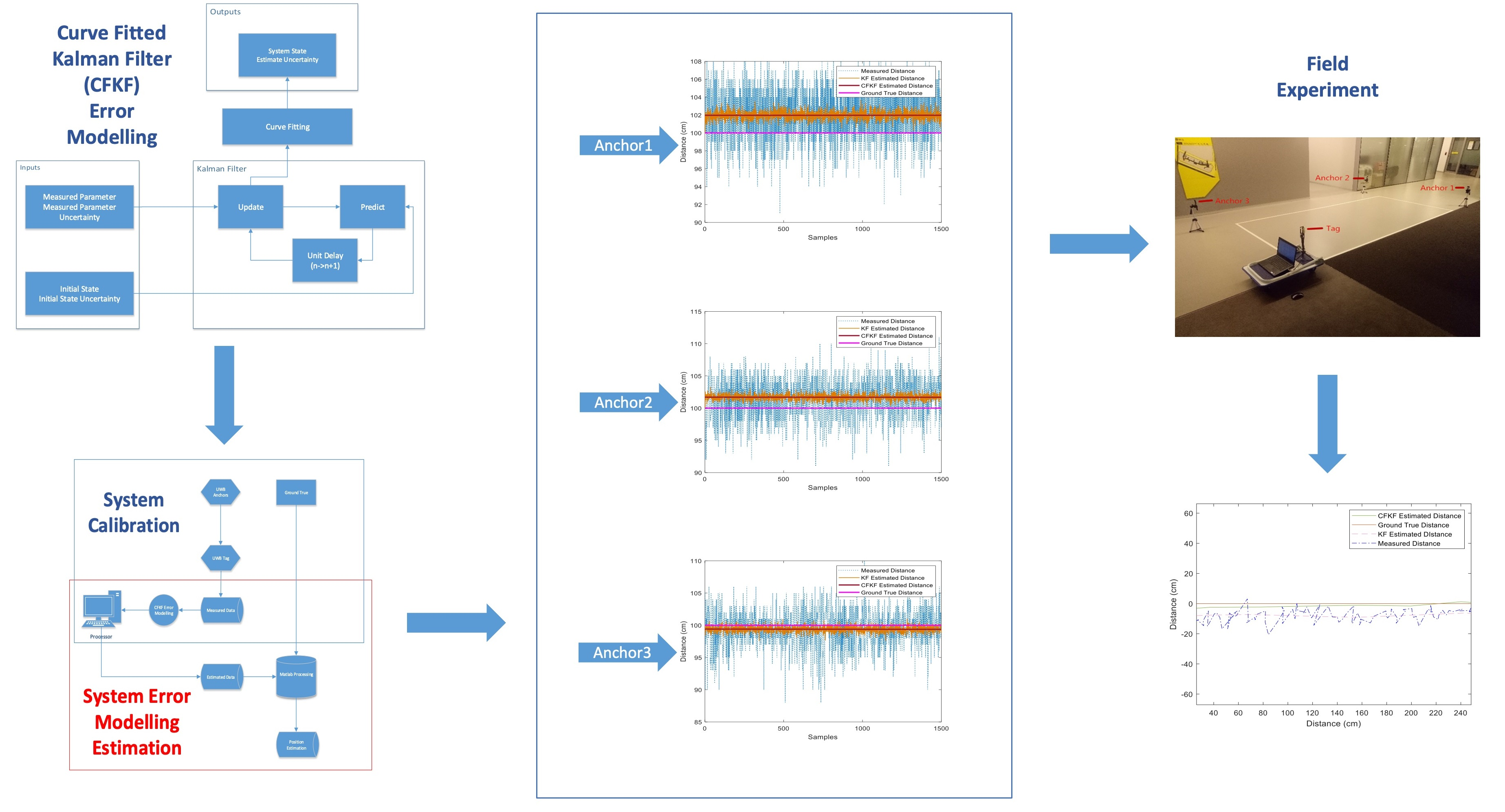
- The calibration and experimental measurements from the ToF method in the UWB system using a curve fitting algorithm.
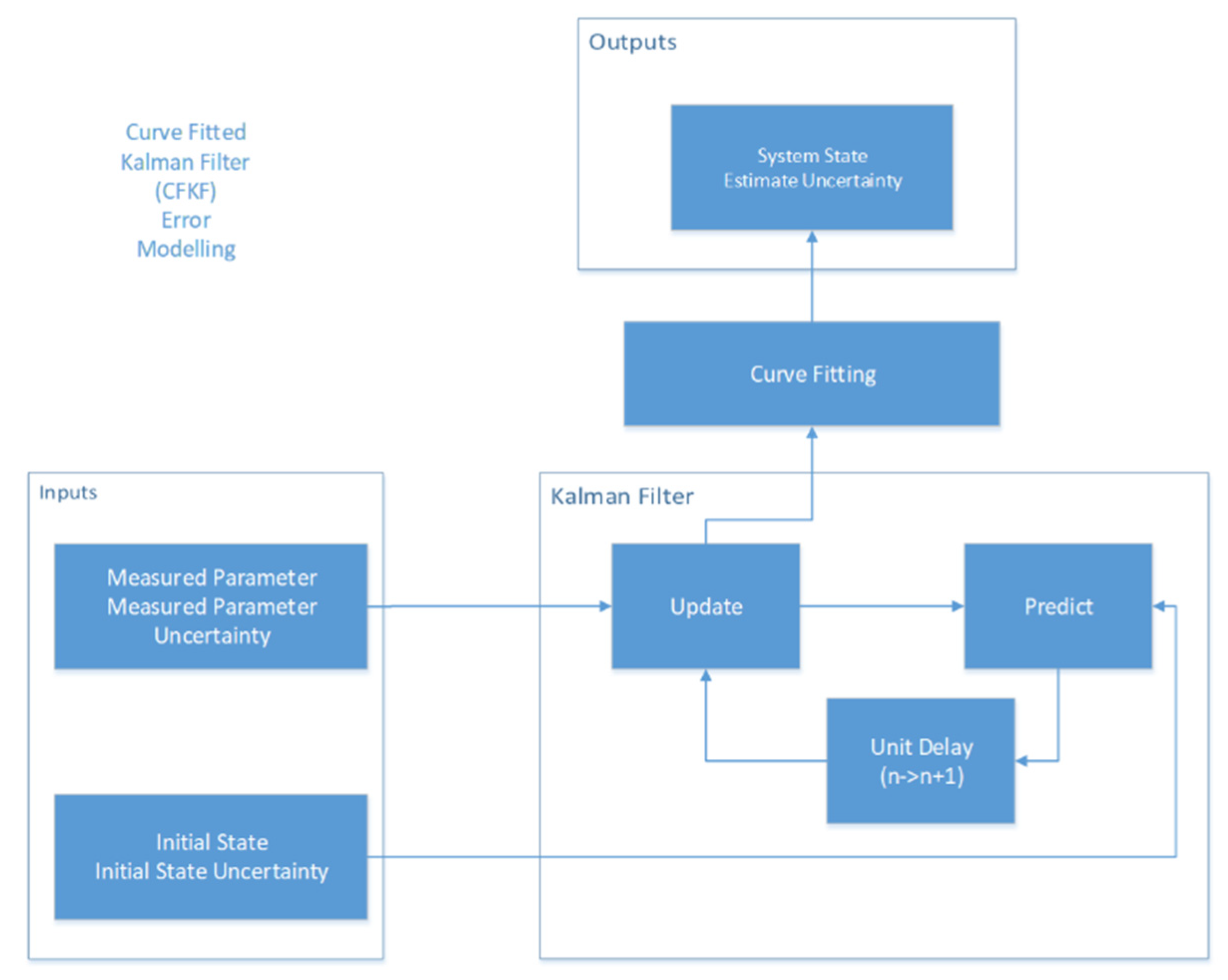
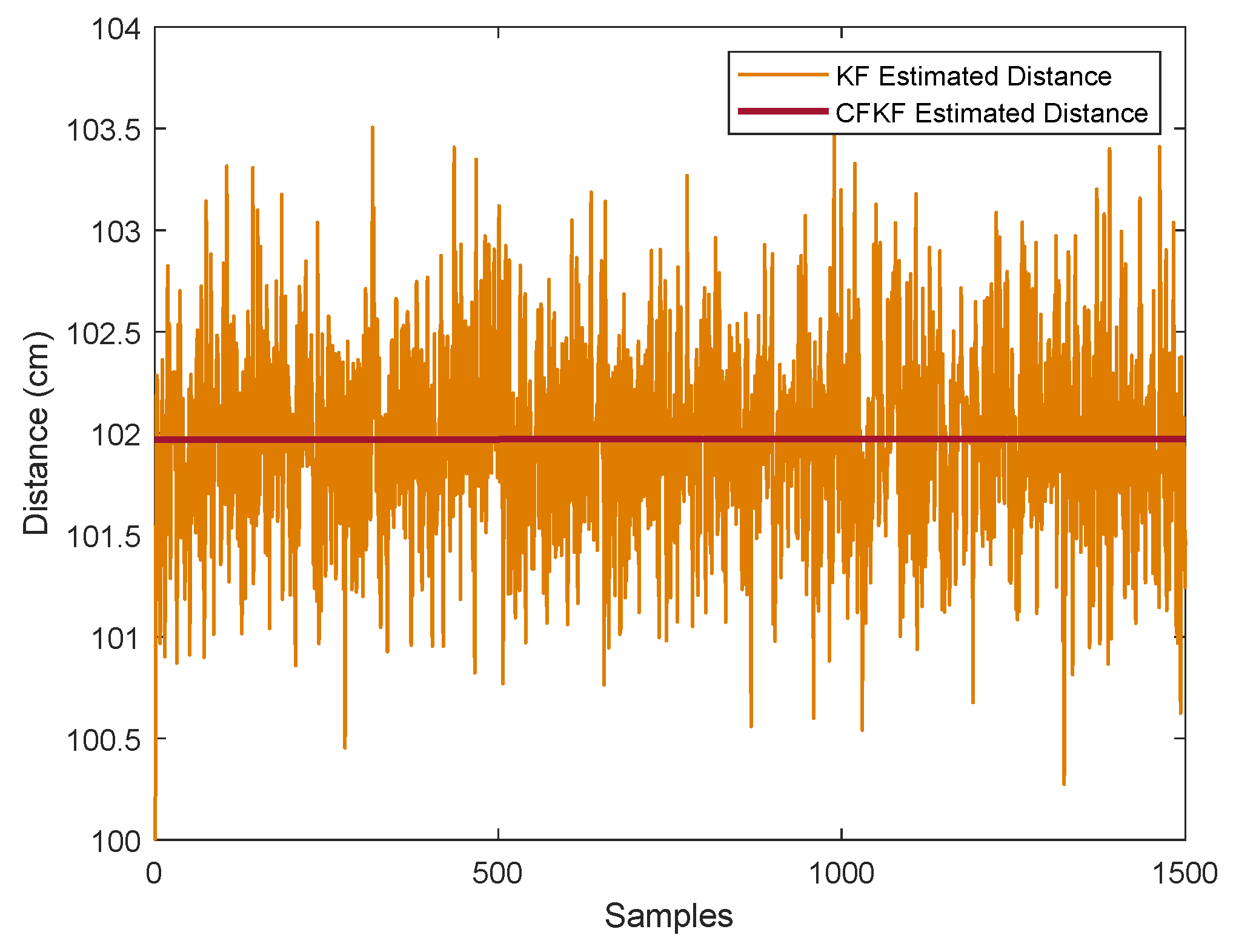
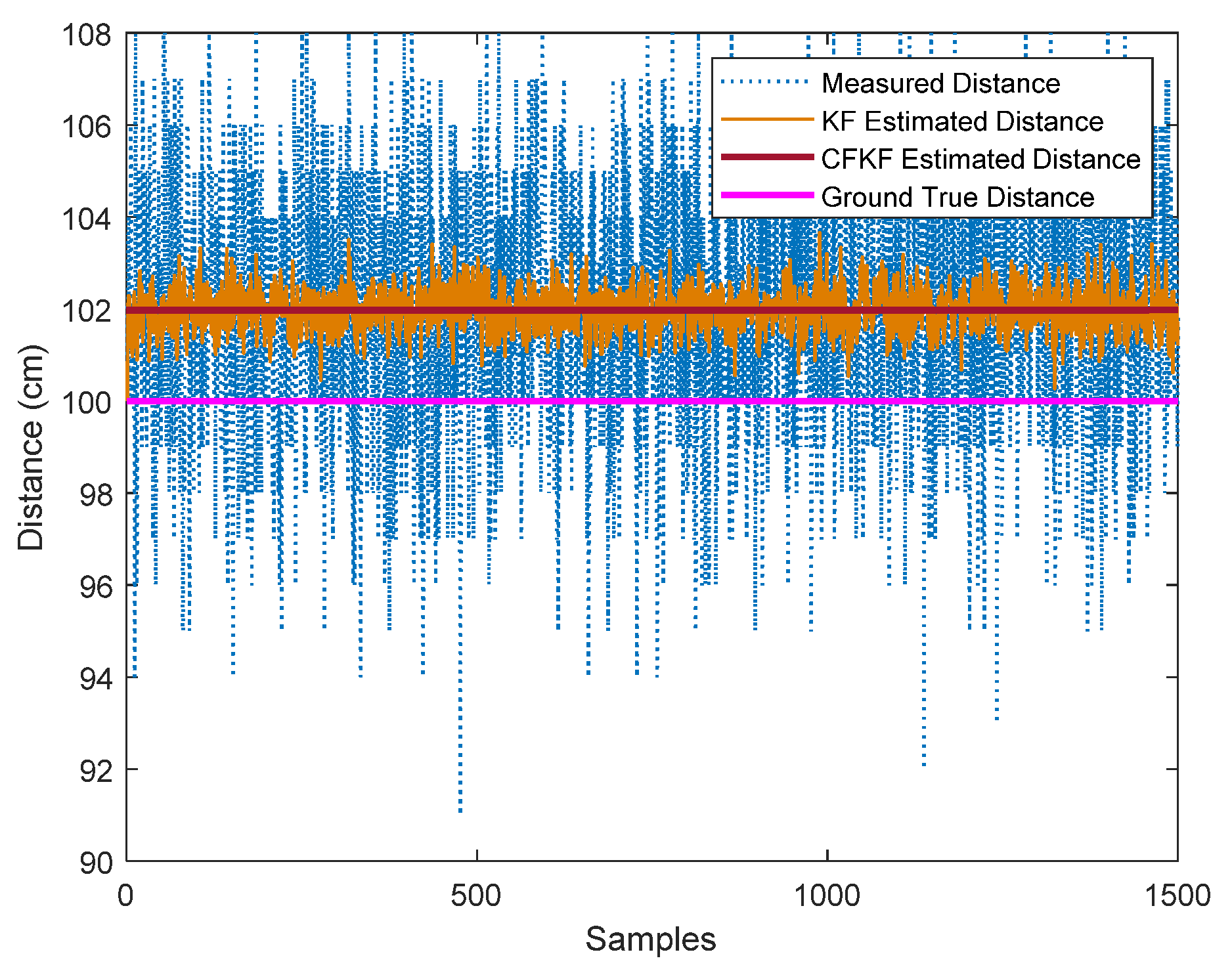
- A novel CFKF error modelling has been developed to optimize the experiment’s estimation accuracy for UWB indoor localization systems.
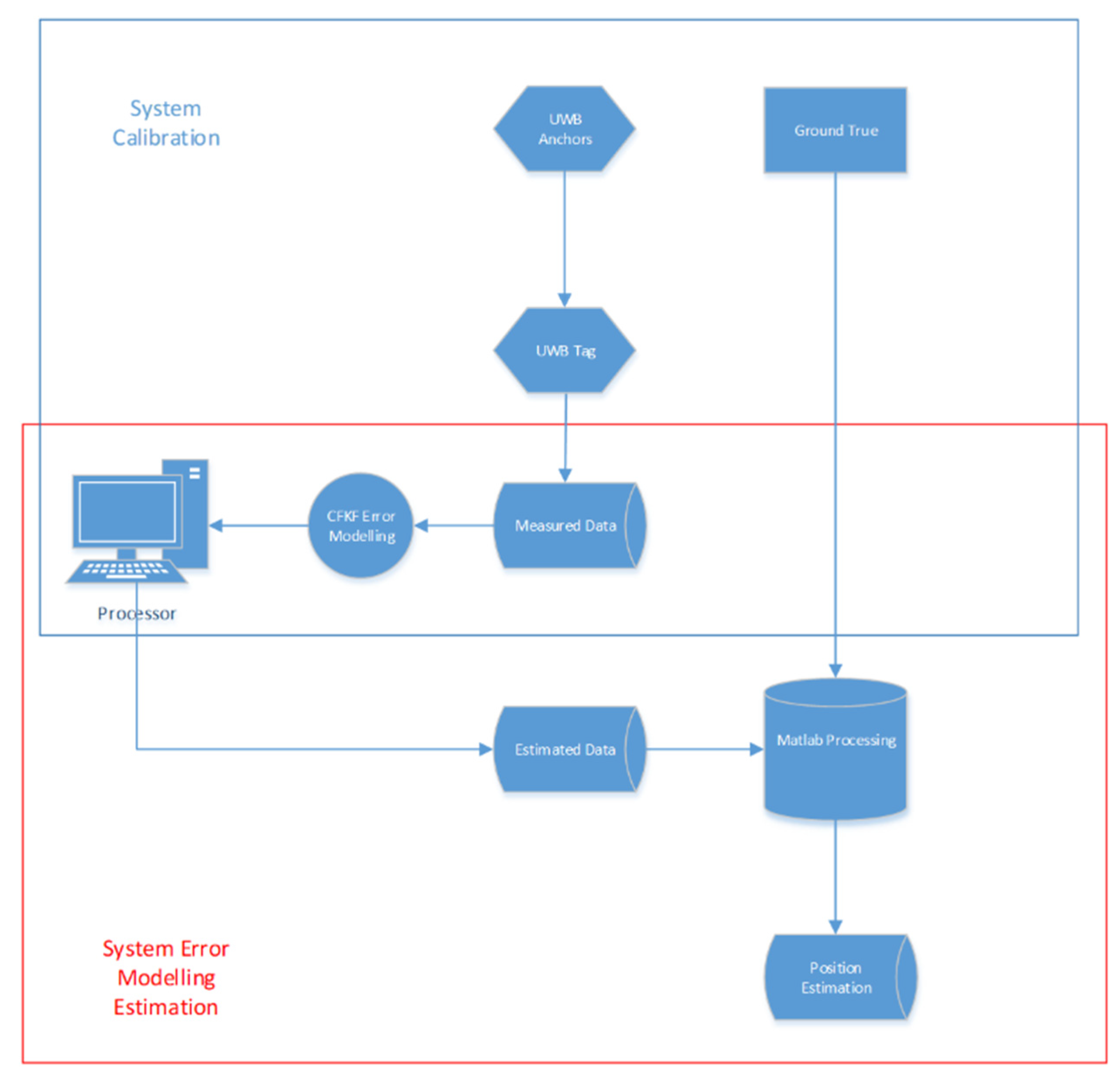
- A developed least squares algorithm (LSA)-based CFKF error modelling is proposed to improve the accuracy of the distance and coordinate for the UWB moving tag in the field experiment.
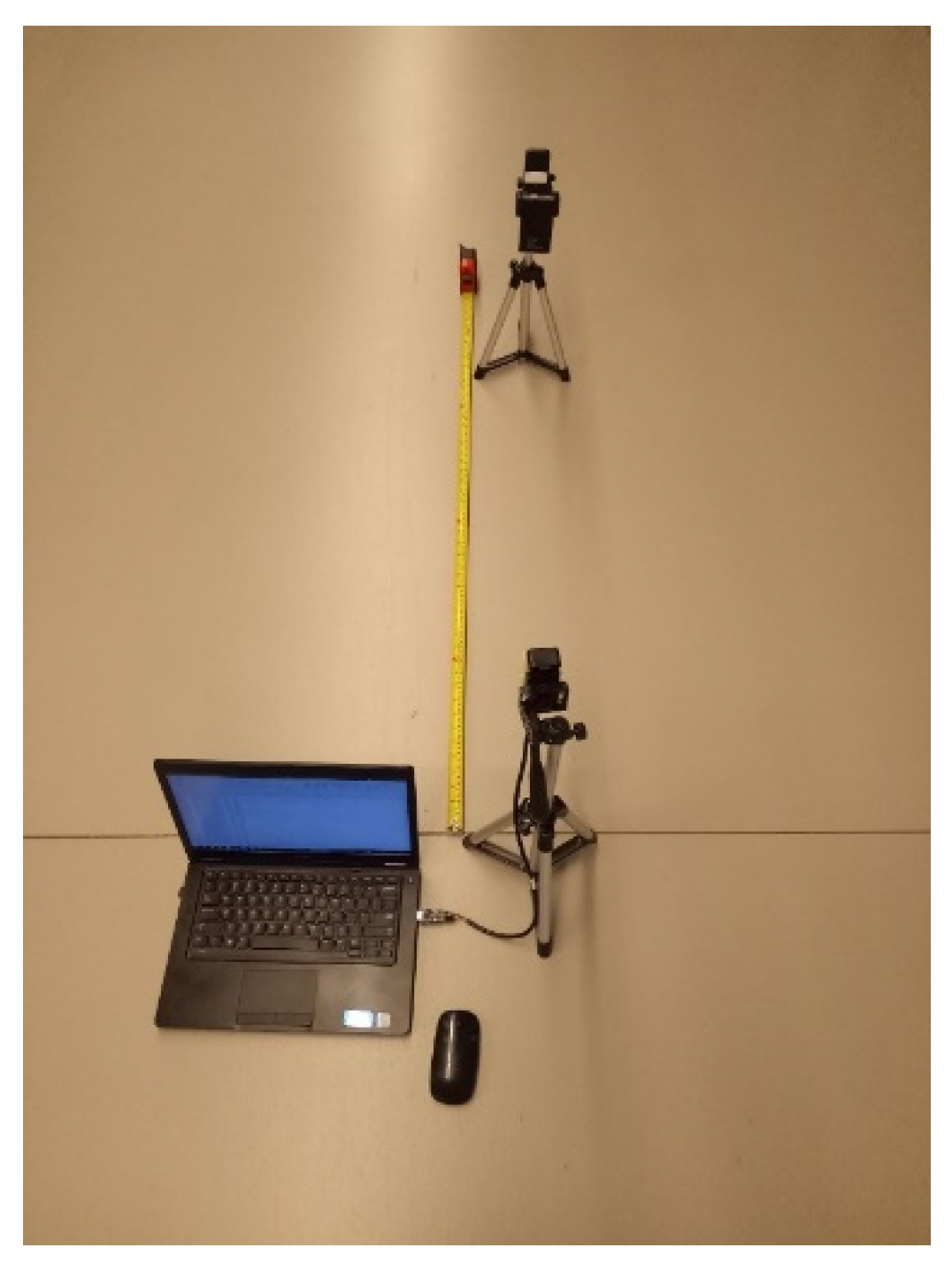
2. Materials and Methods
3. Results and Discussion
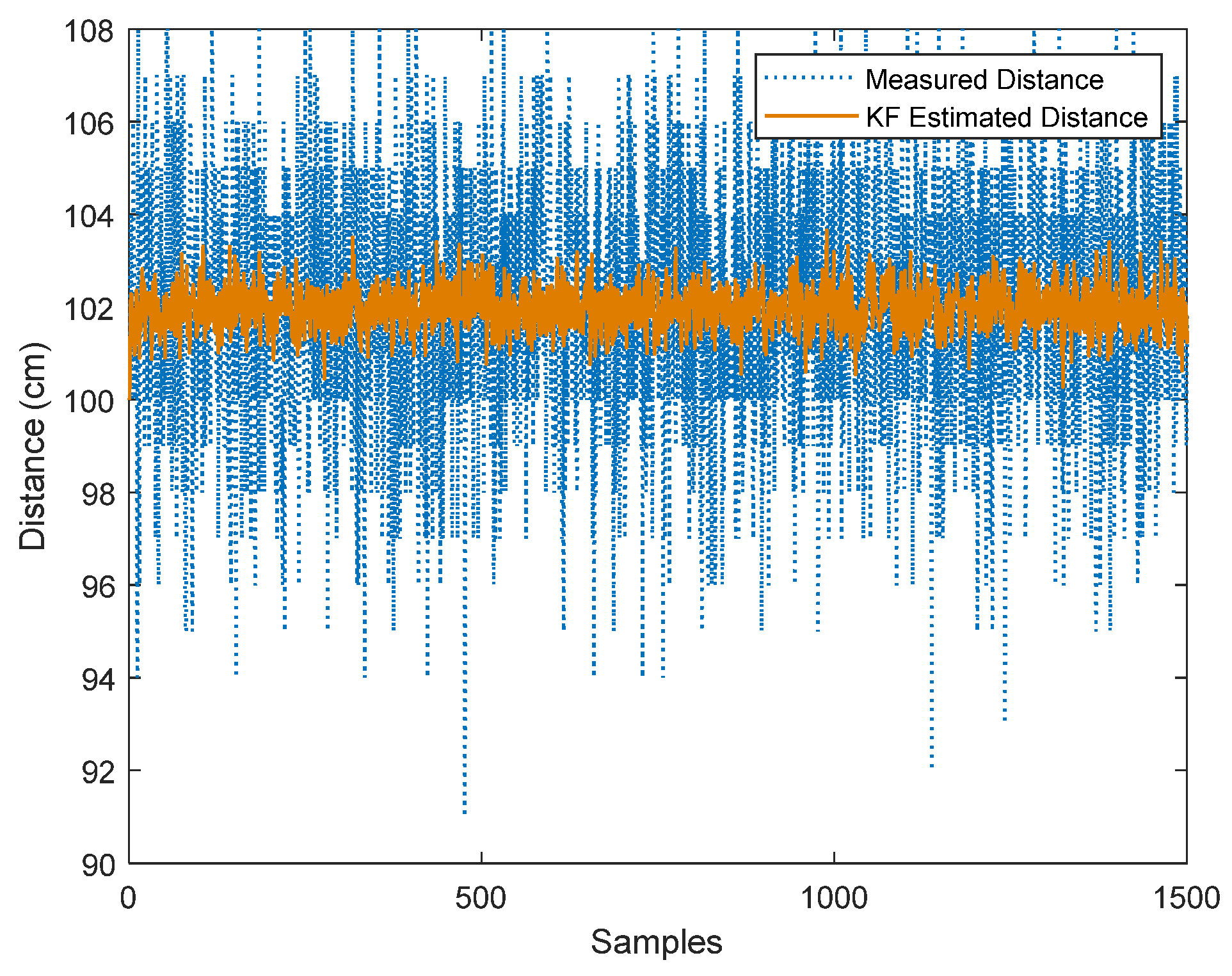
3.1. UWB Calibration Process for Distance
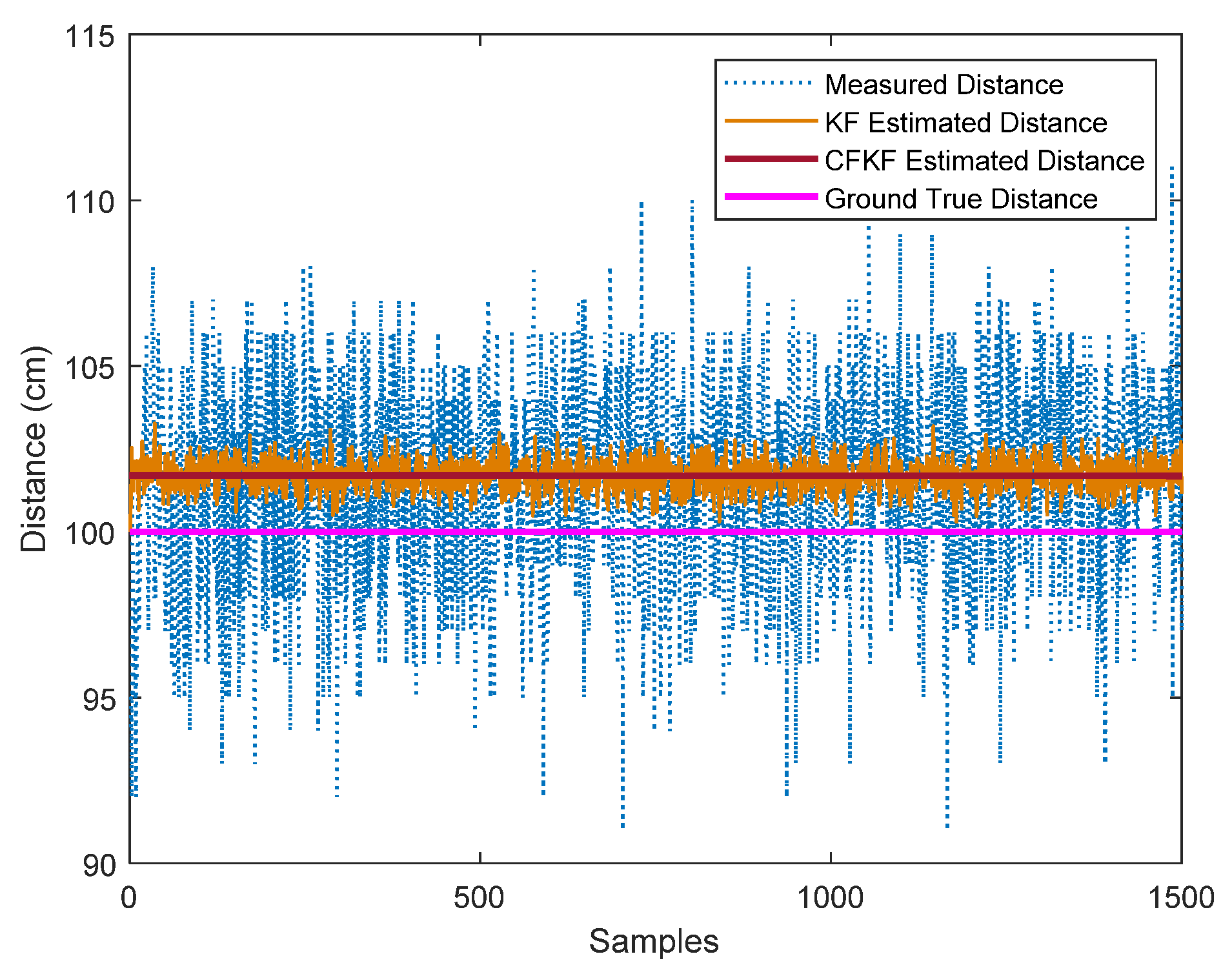
3.2. Error Modelling Calibration for UWB Anchors
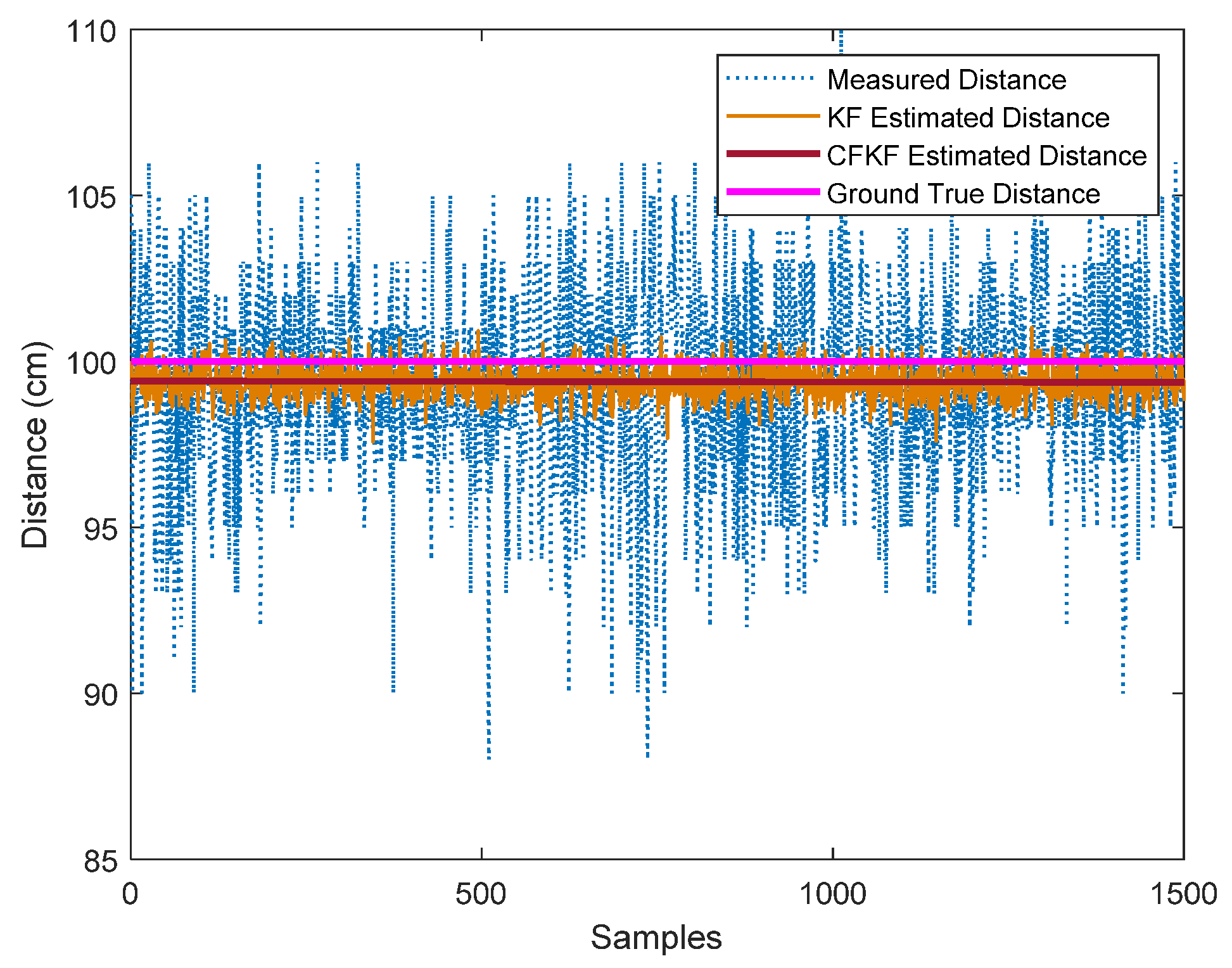
3.3. Error Modelling Optimized Calibration Results
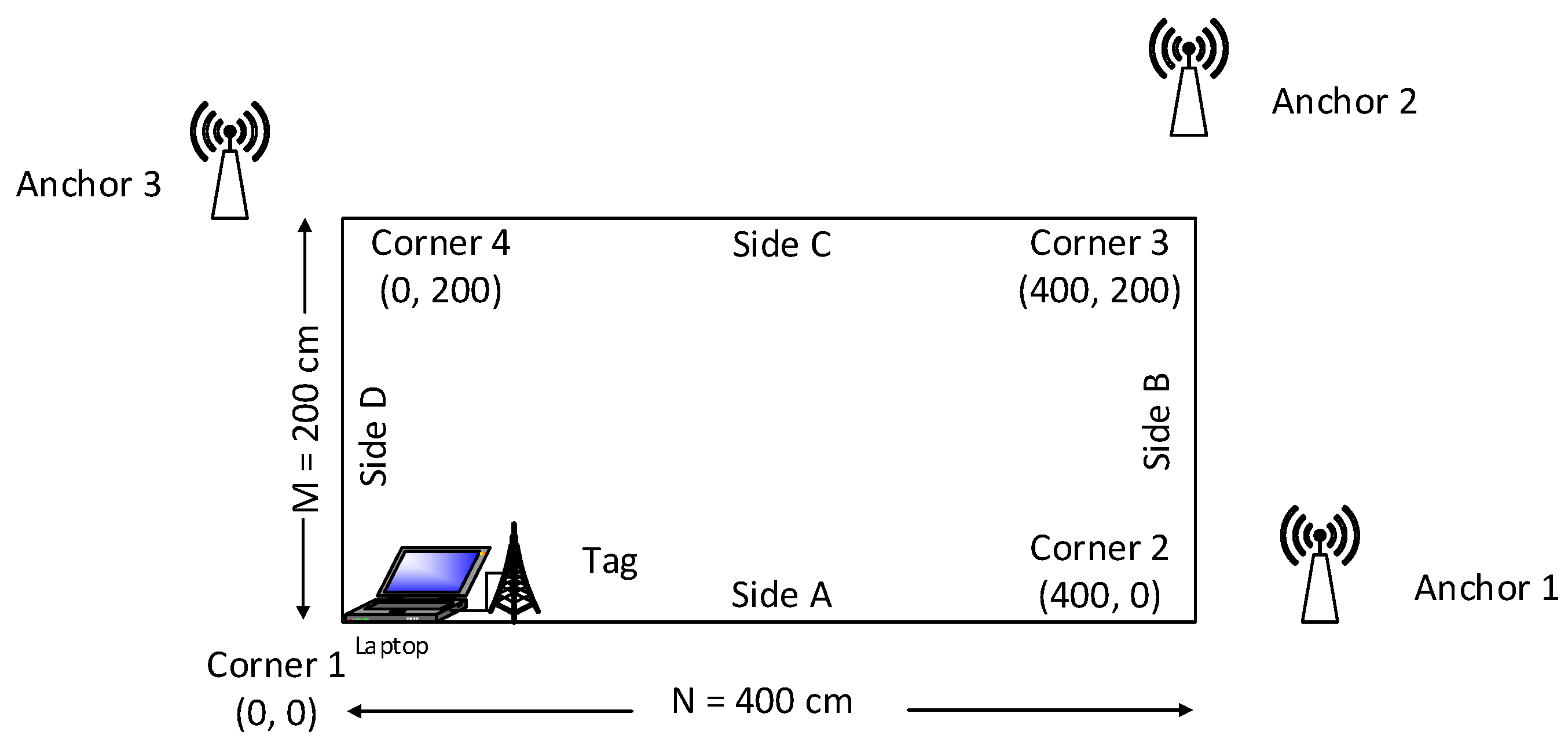
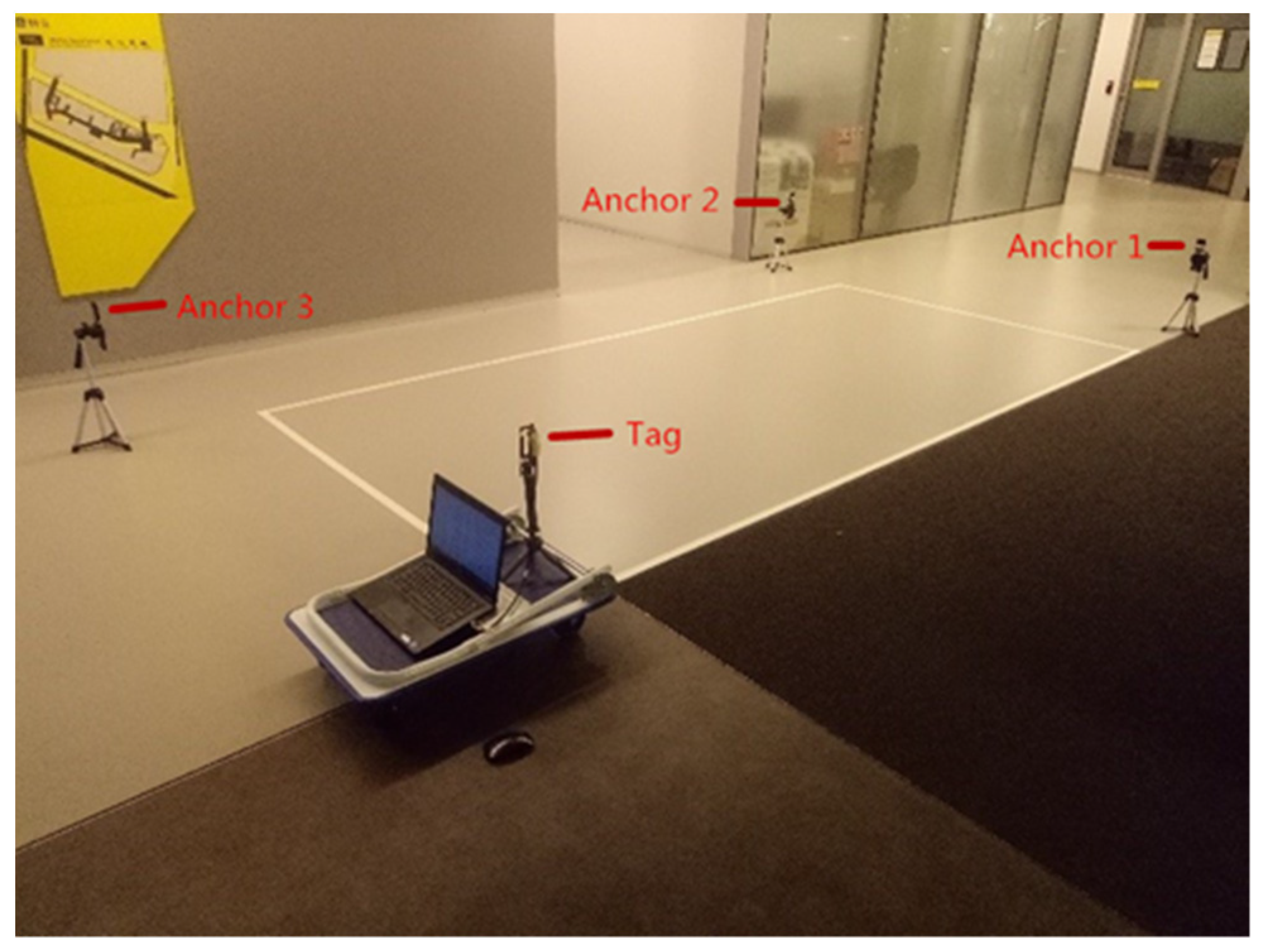
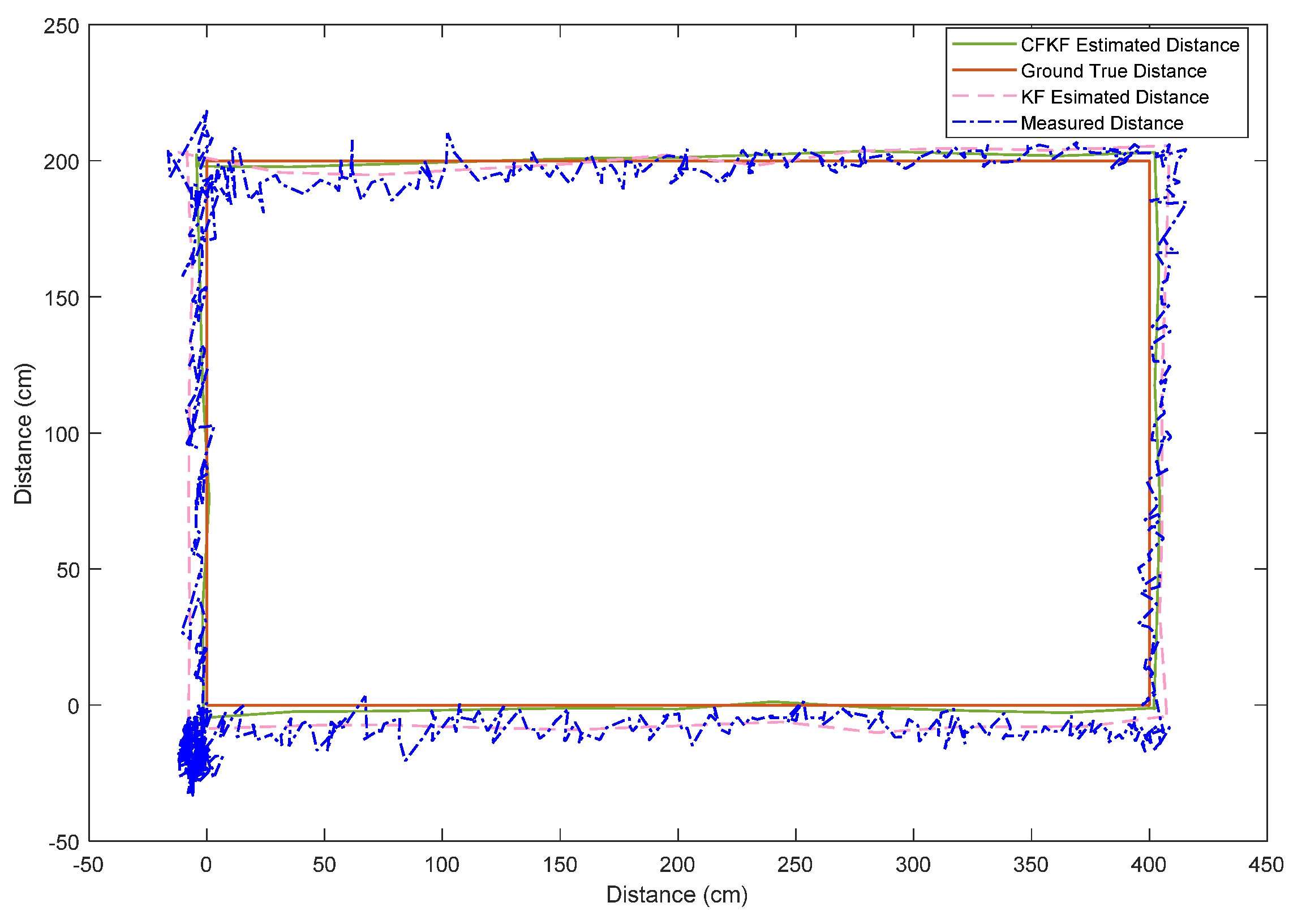
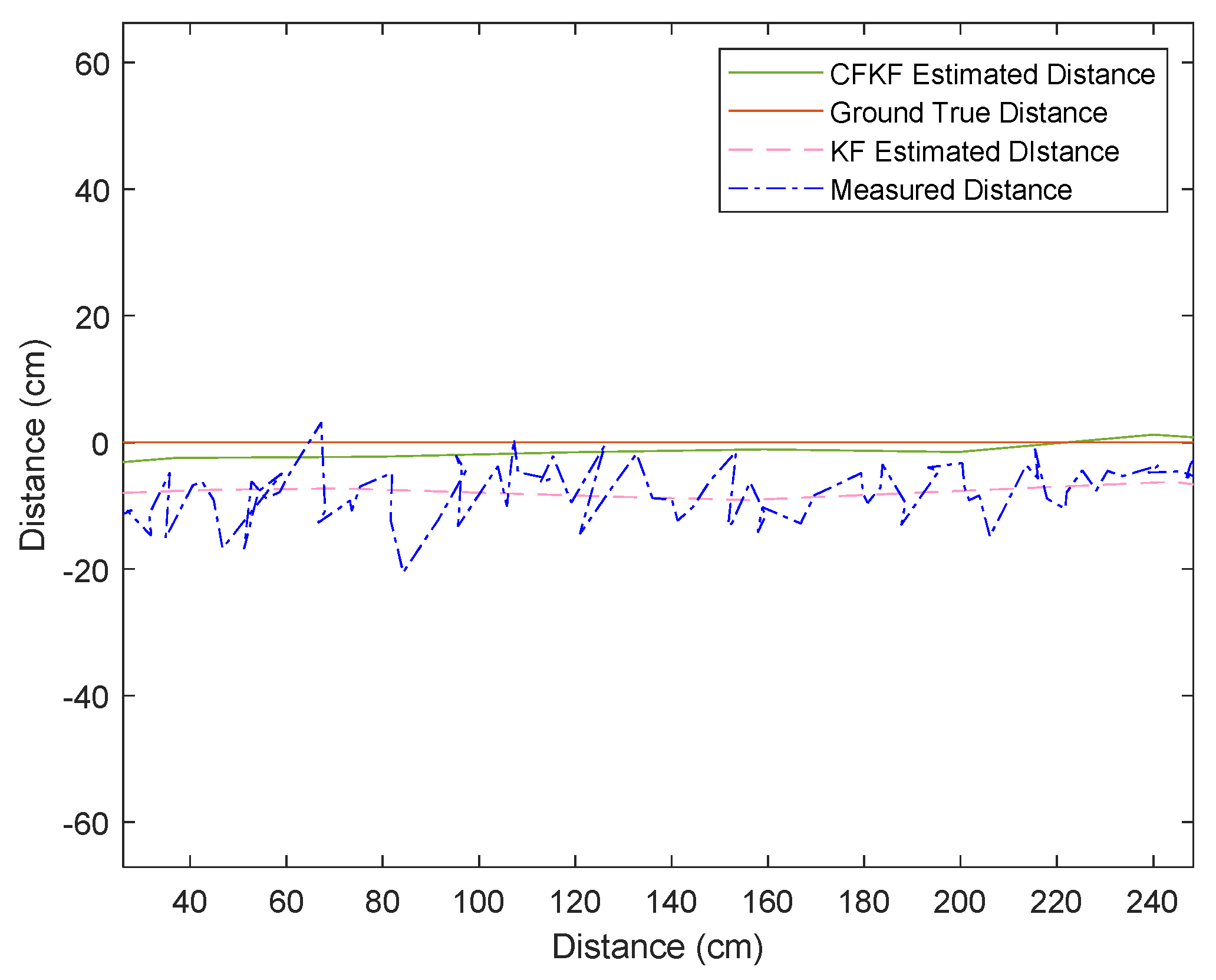
3.4. Field Experiment of UWB Localization
3.5. Experiment Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.-Y.; Qi, G.-Q.; Sheng, A.-D. Performance Metric on the Best Achievable Accuracy for Hybrid TOA/AOA Target Localization. IEEE Commun. Lett. 2018, 22, 1474–1477. [Google Scholar] [CrossRef]
- Mimoune, K.-M.; Ahriz, I.; Guillory, J. Evaluation and Improvement of Localization Algorithms Based on UWB Pozyx System. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019. [Google Scholar] [CrossRef]
- Ni, D.; Postolache, O.A.; Mi, C.; Zhong, M.; Wang, Y. UWB Indoor Positioning Application Based on Kalman Filter and 3-D TOA Localization Algorithm. In Proceedings of the 2019 11th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 28–30 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Peng, W.; Zhao, X.; Jiang, T.; Adachi, F. PRIDE: Path Integration Based Delay Estimation in Multi-Device Multi-Path Environments. IEEE Trans. Veh. Technol. 2018, 67, 11587–11596. [Google Scholar] [CrossRef]
- Piccinni, G.; Torelli, F.; Avitabile, G. Distance Estimation Algorithm for Wireless Localization Systems Based on Lyapunov Sensitivity Theory. IEEE Access 2019, 7, 158338–158348. [Google Scholar] [CrossRef]
- Wang, M.; Xue, B.; Wang, W.; Yang, J. The design of multi-user indoor UWB localization system. In Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies (ICFST), Shenzhen, China, 14–16 April 2017; pp. 322–326. [Google Scholar] [CrossRef]
- Shang, F.; Champagne, B.; Psaromiligkos, I.N. A ML-Based Framework for Joint TOA/AOA Estimation of UWB Pulses in Dense Multipath Environments. IEEE Trans. Wirel. Commun. 2014, 13, 5305–5318. [Google Scholar] [CrossRef]
- Bulten, W. Kalman Filters Explained: Removing Noise from RSSI Signals. 2015. Available online: https://www.wouterbulten.nl/blog/tech/kalman-filtersexplained-removing-noise-from-rssi-signals (accessed on 11 August 2022).
- Ding, G.; Zhang, J.; Zhang, L.; Tan, Z. Overview of received signal strength based fingerprinting localization in indoor wireless LAN environments. In Proceedings of the 2013 5th IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Chengdu, China, 29–31 October 2013; pp. 160–164. [Google Scholar] [CrossRef]
- Iglesias, H.J.P.; Barral, V.; Escudero, C.J. Indoor person localization system through RSSI Bluetooth fingerprinting. In Proceedings of the 2012 19th International Conference on Systems, Signals and Image Processing (IWSSIP), Vienna, Austria, 11–13 April 2012; pp. 40–43. [Google Scholar]
- Papamanthou, C.; Preparata, F.P.; Tamassia, R. Algorithms for location estimation based on RSSI sampling. In International Symposium on Algorithms and Experiments for Sensor Systems, Wireless Networks and Distributed Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 72–86. [Google Scholar]
- Wang, J.-Y.; Chen, C.-P.; Lin, T.-S.; Chuang, C.-L.; Lai, T.-Y.; Jiang, J.-A. High-Precision RSSI-based Indoor Localization Using a Transmission Power Adjustment Strategy for Wireless Sensor Networks. In Proceedings of the 2012 IEEE 14th International Conference on High Performance Computing and Communication & 2012 IEEE 9th International Conference on Embedded Software and Systems, Liverpool, UK, 25–27 June 2012; pp. 1634–1638. [Google Scholar] [CrossRef]
- Huang, S.; Chen, J.; Jiang, H. UWB indoor location based on improved least square support vector machine considering anchor anomaly. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Singapore, 9–11 October 2020; pp. 324–329. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G.; Talarico, C. Real-Time Distance Evaluation System for Wireless Localization. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 3320–3330. [Google Scholar] [CrossRef]
- Cui, X.; Li, J.; Wu, C.; Liu, J.-H. A Timing Estimation Method Based-on Skewness Analysis in Vehicular Wireless Networks. Sensors 2015, 15, 28942–28959. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, H.; Gulliver, T.A. Energy Detector based Time of Arrival Estimation using a Neural Network with Millimeter Wave Signals. KSII Trans. Internet Inf. Syst. 2016, 10, 3050–3065. [Google Scholar]
- Liang, X.; Zhang, H.; Lu, T.; Gulliver, T.A. Energy detector based TOA estimation for MMW systems using machine learning. Telecommun. Syst. 2017, 64, 417–427. [Google Scholar] [CrossRef]
- Guvenc, I.; Şahinoğlu, Z. Threshold selection for UWB TOA estimation based on kurtosis analysis. IEEE Commun. Lett. 2005, 9, 1025–1027. [Google Scholar] [CrossRef]
- Ding, R.; Qian, Z.-H.; Wang, X. UWB Positioning System Based on Joint TOA and DOA Estimation. J. Electron. Inf. Technol. 2010, 32, 313–317. [Google Scholar] [CrossRef]
- Li, X.; Cao, F. Location Based TOA Algorithm for UWB Wireless Body Area Networks. In Proceedings of the 2014 IEEE 12th International Conference on Dependable, Autonomic and Secure Computing, Dalian, China, 24–27 August 2014; pp. 507–511. [Google Scholar] [CrossRef]
- Wang, T.; Chen, X.; Ge, N.; Pei, Y. Error analysis and experimental study on indoor UWB TDoA localization with reference tag. In Proceedings of the 2013 19th Asia-Pacific Conference on Communications (APCC), Denpasar, Bali Island, 29–31 August 2013; pp. 505–508. [Google Scholar] [CrossRef]
- Adams, J.C.; Gregorwich, W.; Capots, L.; Liccardo, D. Ultra-wideband for navigation and communications. In Proceedings of the 2001 IEEE Aerospace Conference Proceedings (Cat. No. 01TH8542), Big Sky, MT, USA, 10–17 March 2001; Volume 2, pp. 785–792. [Google Scholar]
- Beuchat, P.N.; Hesse, H.; Domahidi, A.; Lygeros, J. Enabling Optimization-Based Localization for IoT Devices. IEEE Internet Things J. 2019, 6, 5639–5650. [Google Scholar] [CrossRef]
- Zhang, S.; Han, R.; Huang, W.; Wang, S.; Hao, Q. Linear Bayesian Filter Based Low-Cost UWB Systems for Indoor Mobile Robot Localization. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, S.; Wang, B. Residual based weighted least square algorithm for bluetooth/UWB indoor localization system. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 5959–5963. [Google Scholar] [CrossRef]
- Güvenç, I.; Chong, C.-C.; Watanabe, F.; Inamura, H. NLOS Identification and Weighted Least-Squares Localization for UWB Systems Using Multipath Channel Statistics. EURASIP J. Adv. Signal Process. 2007, 2008, 271984. [Google Scholar] [CrossRef]
- Dardari, D.; Conti, A.; Lien, J.; Win, M.Z. The effect of cooperation on localization systems using UWB experimental data. EURASIP J. Appl. Signal Process. 2008, 2008, 513873. [Google Scholar] [CrossRef]
- Molisch, A.F. Ultrawideband propagation channels-theory, measurement, and modeling. IEEE Trans. Veh. Technol. 2005, 54, 1528–1545. [Google Scholar] [CrossRef]
- Karedal, J.; Wyne, S.; Almers, P.; Tufvesson, F.; Molisch, A.F. A Measurement-Based Statistical Model for Industrial Ultra-Wideband Channels. IEEE Trans. Wirel. Commun. 2007, 6, 3028–3037. [Google Scholar] [CrossRef]
- Wymeersch, H.; Marano, S.; Gifford, W.M.; Win, M.Z. A Machine Learning Approach to Ranging Error Mitigation for UWB Localization. IEEE Trans. Commun. 2012, 60, 1719–1728. [Google Scholar] [CrossRef]
- Dong, F.; Shen, C.; Zhang, J.; Zhou, S. A TOF and Kalman filtering joint algorithm for IEEE802. 15.4 a UWB locating. In Proceedings of the 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 20–22 May 2016; pp. 948–951. [Google Scholar]
- Zhu, D.; Yi, K. EKF localization based on TDOA/RSS in underground mines using UWB ranging. In Proceedings of the 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 14–16 September 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Yan, L.; Lu, Y.; Zhang, Y. An Improved NLOS Identification and Mitigation Approach for Target Tracking in Wireless Sensor Networks. IEEE Access 2017, 5, 2798–2807. [Google Scholar] [CrossRef]
- Lategahn, J.; Muller, M.; Rohrig, C. TDoA and RSS Based Extended Kalman Filter for Indoor Person Localization. In Proceedings of the 2013 IEEE 78th Vehicular Technology Conference (VTC Fall), Las Vegas, NV, USA, 2–5 September 2013; pp. 1–5. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Specification |
|---|---|
| Measurement Method | ToF |
| Factory Error | Line of Sight < 15 cm, No Line of Sight < 30 cm |
| Positioning Accuracy | <20 cm |
| Anchor Setup Range | <100 m (Line of Sight) |
| Transmission Range | <130 m (Line of Sight) |
| Tag Number | Max 7 in the System |
| Data Refresh Rate | Single Tag 15 Hz |
| Power | Average 0.5 W |
| Operating Temperature | −40 °C to 85 °C |
| Operating Frequency | 6.2 GHz to 6.7 GHz |
| Size | Anchor: 82.5 mm × 38 mm × 11.5 mm, Tag: 69 mm × 38 mm × 11.9 mm |
| Power Supply | DC 5V, 1A |
| Tag No. | Time (ms) | Anchor ID | Distance (cm) |
|---|---|---|---|
| ⁞ | ⁞ | ⁞ | ⁞ |
| Tag No.: 1 | 26,151 | Anchor 1 | 100 |
| Tag No.: 1 | 26,207 | Anchor 1 | 103 |
| Tag No.: 1 | 26,263 | Anchor 1 | 104 |
| Tag No.: 1 | 26,319 | Anchor 1 | 100 |
| Tag No.: 1 | 26,375 | Anchor 1 | 100 |
| Tag No.: 1 | 26,431 | Anchor 1 | 106 |
| Tag No.: 1 | 26,488 | Anchor 1 | 105 |
| Tag No.: 1 | 26,544 | Anchor 1 | 101 |
| Tag No.: 1 | 26,600 | Anchor 1 | 100 |
| Tag No.: 1 | 26,688 | Anchor 1 | 102 |
| Tag No.: 1 | 26,744 | Anchor 1 | 100 |
| Tag No.: 1 | 26,800 | Anchor 1 | 94 |
| Tag No.: 1 | 26,857 | Anchor 1 | 108 |
| Tag No.: 1 | 26,913 | Anchor 1 | 102 |
| Tag No.: 1 | 26,969 | Anchor 1 | 96 |
| Tag No.: 1 | 27,025 | Anchor 1 | 102 |
| Tag No.: 1 | 27,081 | Anchor 1 | 105 |
| Tag No.: 1 | 27,137 | Anchor 1 | 103 |
| Tag No.: 1 | 27,225 | Anchor 1 | 104 |
| Tag No.: 1 | 27,282 | Anchor 1 | 105 |
| Tag No.: 1 | 27,338 | Anchor 1 | 102 |
| ⁞ | ⁞ | ⁞ | ⁞ |
| Positioning Algorithm | Bias (Centimeter) | Uncertainty Rate |
|---|---|---|
| Anchor 1 | ||
| CFKF | 1.9 | 1.9% |
| KF | 2.4 | 2.4% |
| Measurement | 4.5 | 4.5% |
| Anchor 2 | ||
| CFKF | 1.7 | 1.7% |
| KF | 2.1 | 2.1% |
| Measurement | 3.7 | 3.7% |
| Anchor 3 | ||
| CFKF | −0.6 | 0.6% |
| KF | −1.5 | 1.5% |
| Measurement | −3.2 | 3.2% |
| Positioning Algorithm | Bias (Centimeter) | Uncertainty Rate |
|---|---|---|
| CFKF | 1–2 | 1–2% |
| KF | 2–10 | 2–10% |
| Measurement | 2–20 | 2–20% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Chaczko, Z.; Shi, J. A Novel Algorithm Modelling for UWB Localization Accuracy in Remote Sensing. Remote Sens. 2022, 14, 4902. https://doi.org/10.3390/rs14194902
Yu Z, Chaczko Z, Shi J. A Novel Algorithm Modelling for UWB Localization Accuracy in Remote Sensing. Remote Sensing. 2022; 14(19):4902. https://doi.org/10.3390/rs14194902
Chicago/Turabian StyleYu, Zhengyu, Zenon Chaczko, and Jiajia Shi. 2022. "A Novel Algorithm Modelling for UWB Localization Accuracy in Remote Sensing" Remote Sensing 14, no. 19: 4902. https://doi.org/10.3390/rs14194902