2.2. Methodology of Calibrating MIKE Model
The model used in this study was MIKE 21 with a flexible mesh. First, geometry and depth information must be introduced into the model. In addition to geometry and depth, the initial and boundary conditions of the model, including SLH and SSC data at the initial time, along with wind, precipitation, and evaporation data, should be added as inputs to the model. Geometry and depth information are among the most important information for ocean current modeling. A flexible meshing (without structure) was used to increase the accuracy of the calculations and reduce the computational time. For a more efficient calculation of the SSCs, a smaller mesh size in the islands and coastal strip (about 250 m) was selected. As fewer changes occur in offshore areas, larger mesh sizes were chosen (about 750 m) to speed up the performance. For the initial conditions of the SLH and SSCs, the Copernicus Data Center, along with the MSS of the TM-IR01 model, were used (
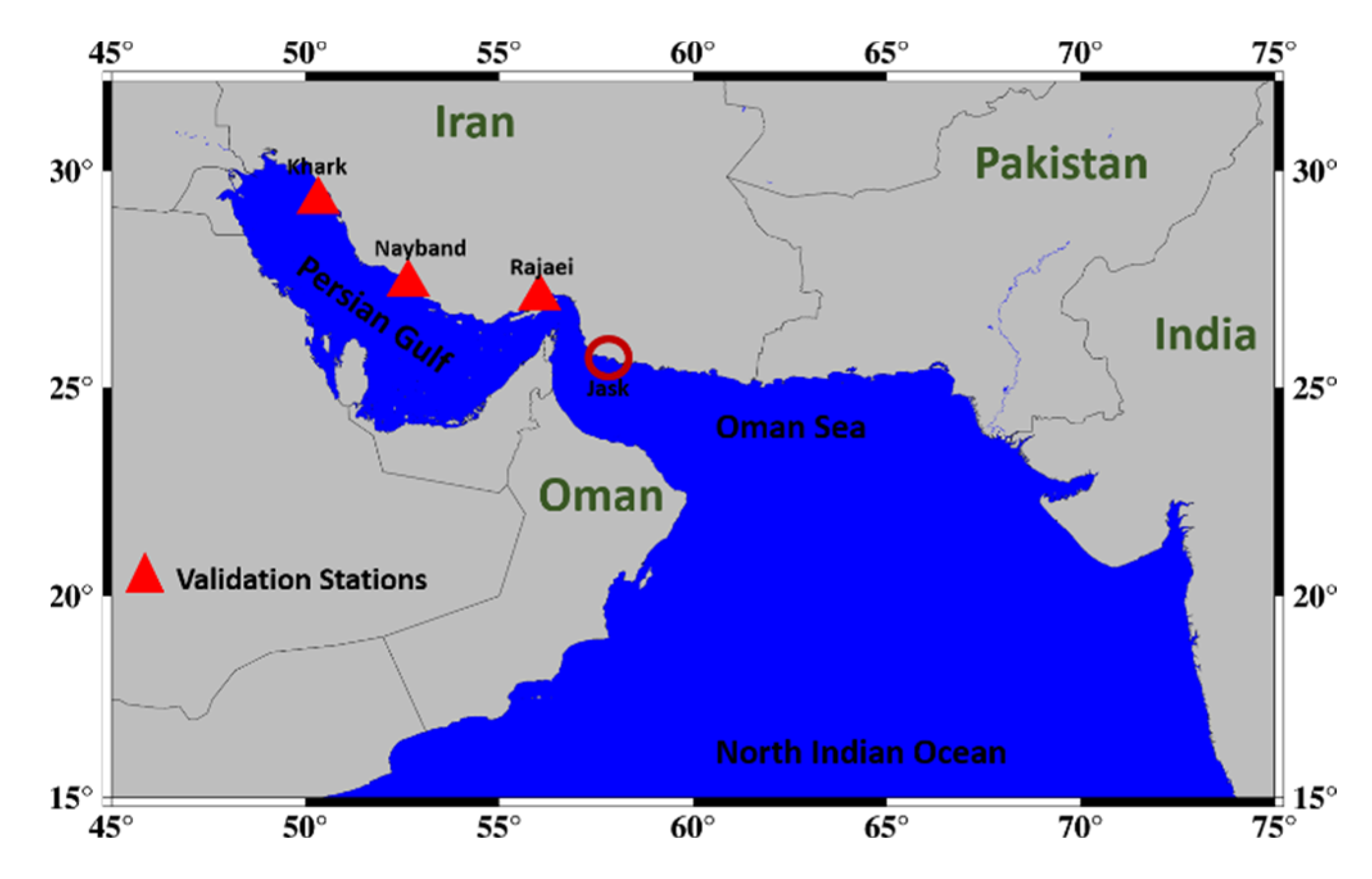
Table 4). The closed boundary conditions were introduced as zero velocity for the SSC components and the specified value for SLH. In fact, the SLH observations at the Chabahar, Rajaei, Khark, Karachi, and Misirah stations were used as boundary conditions for the closed boundary (
Table 1). For open boundary conditions in the North Indian Ocean, the SLH was determined using the TM-IR01 tidal model (
Table 1). TM-IR01 is a local tide model that is provided by the National Cartography Center (NCC) of Iran based on observations of three altimeters, including TOPEX/POSIDON, Jason1, and Jason 2, as well as 13 coastal tide gauge stations [
26].
After creating the geometry and meshing of the model, as well as preparing the initial and boundary conditions, the following parameters should be considered in the MIKE 21 model [
28,
29]:
Selecting the equation solution as “discretization of equations with high degrees”;
Considering density as a function of temperature and salinity;
Variable Coriolis force in place;
Variable wind force;
Tidal force by applying TM-IR01 model tidal components;
Precipitation and evaporation;
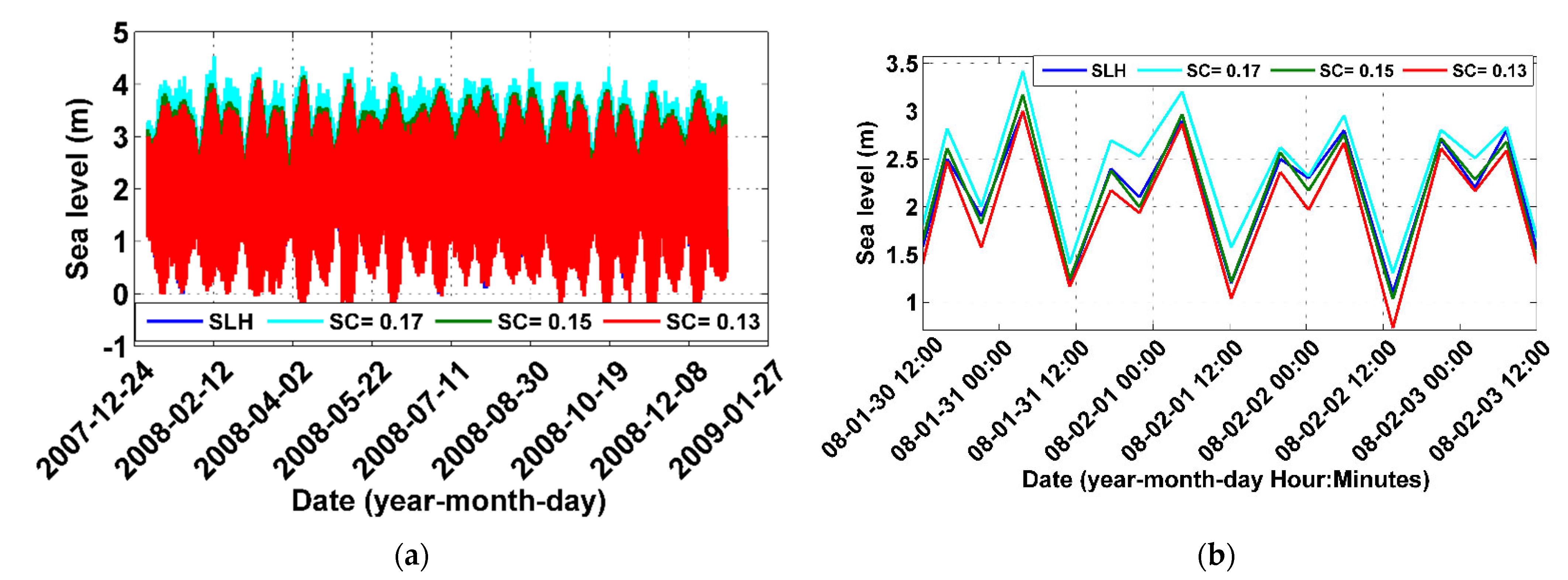
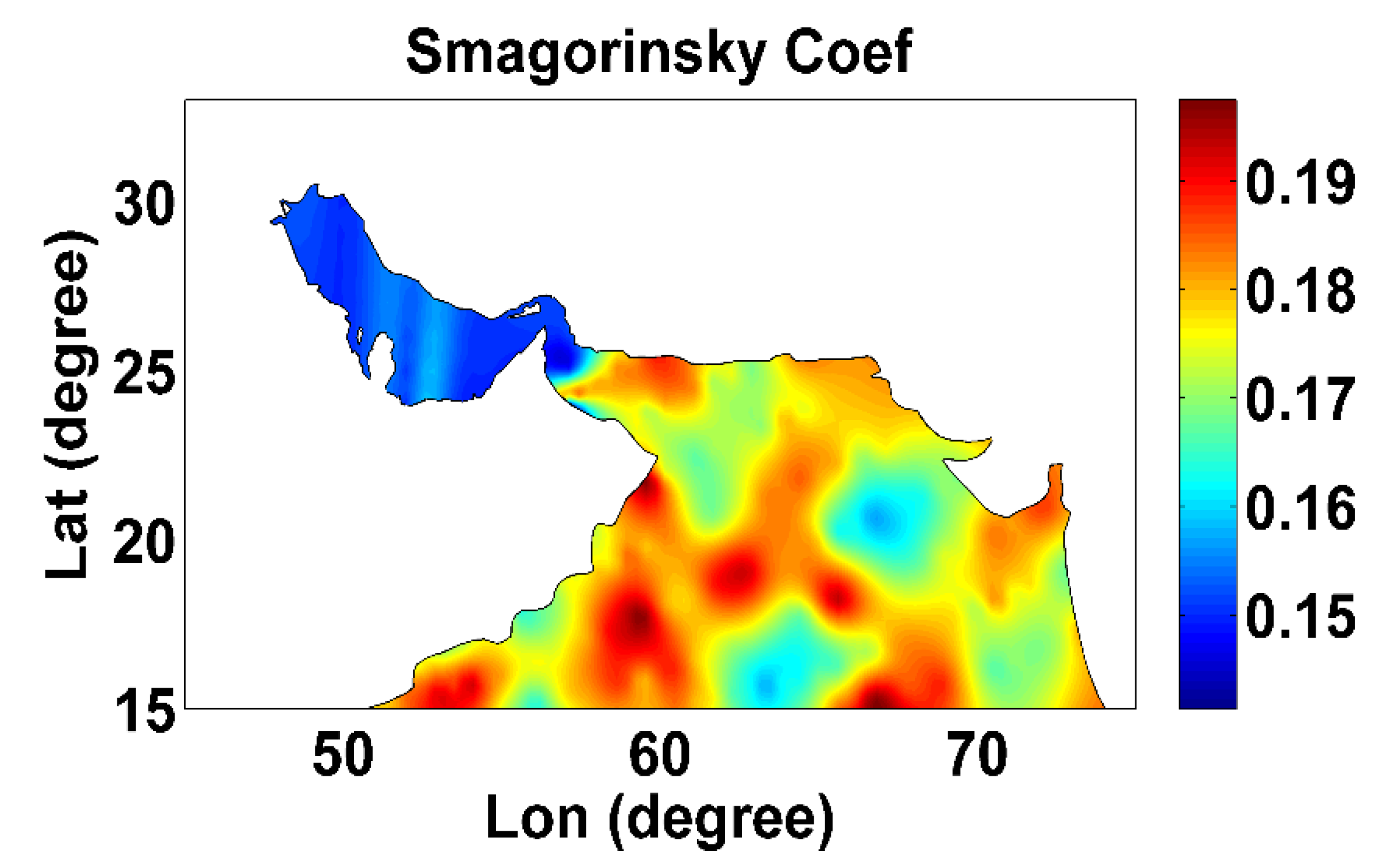
The Smagorinsky formula was used for horizontal eddy viscosity [
30], with a constant value of 0.28 for the Smagorinsky coefficient as the suggested number for the MIKE 21 model;
In the MIKE 21 model, one of the most valuable features is the ability to dynamically adjust the domain of the computations. This enables one to calculate SSCs in areas that sometimes are dry and sometimes are wet, such as tidal zones;
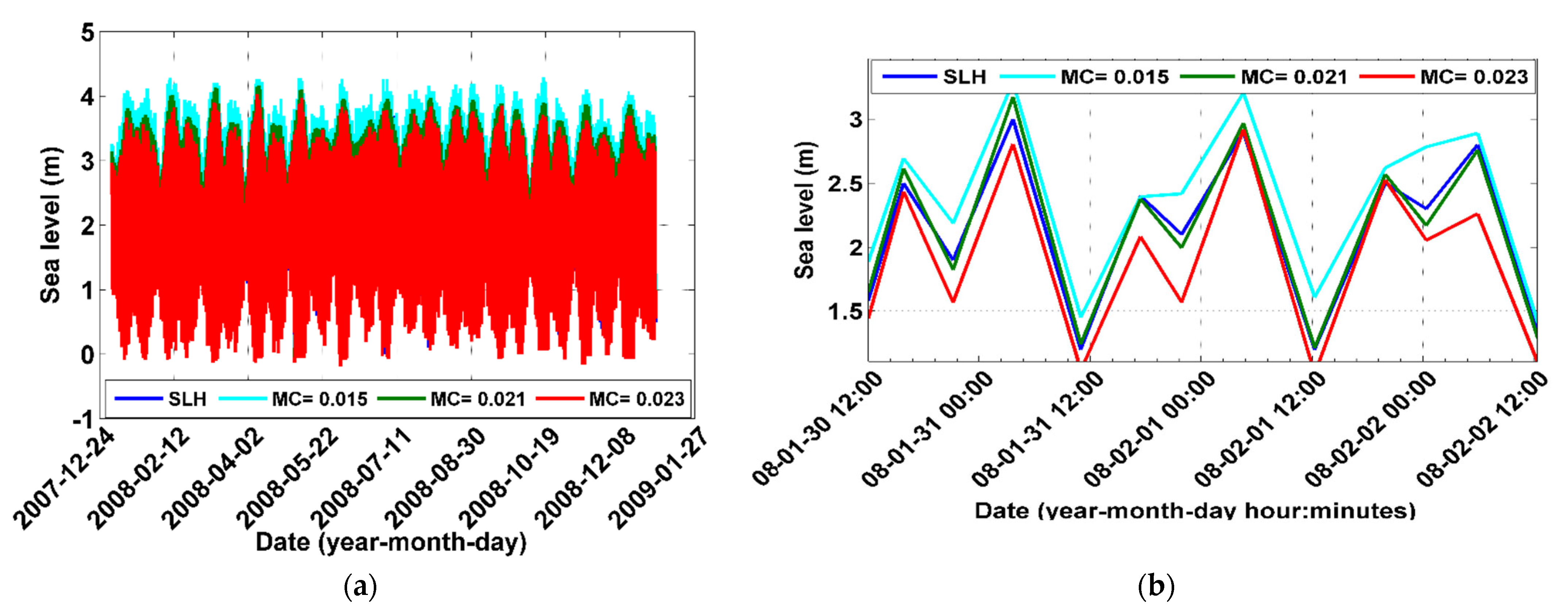
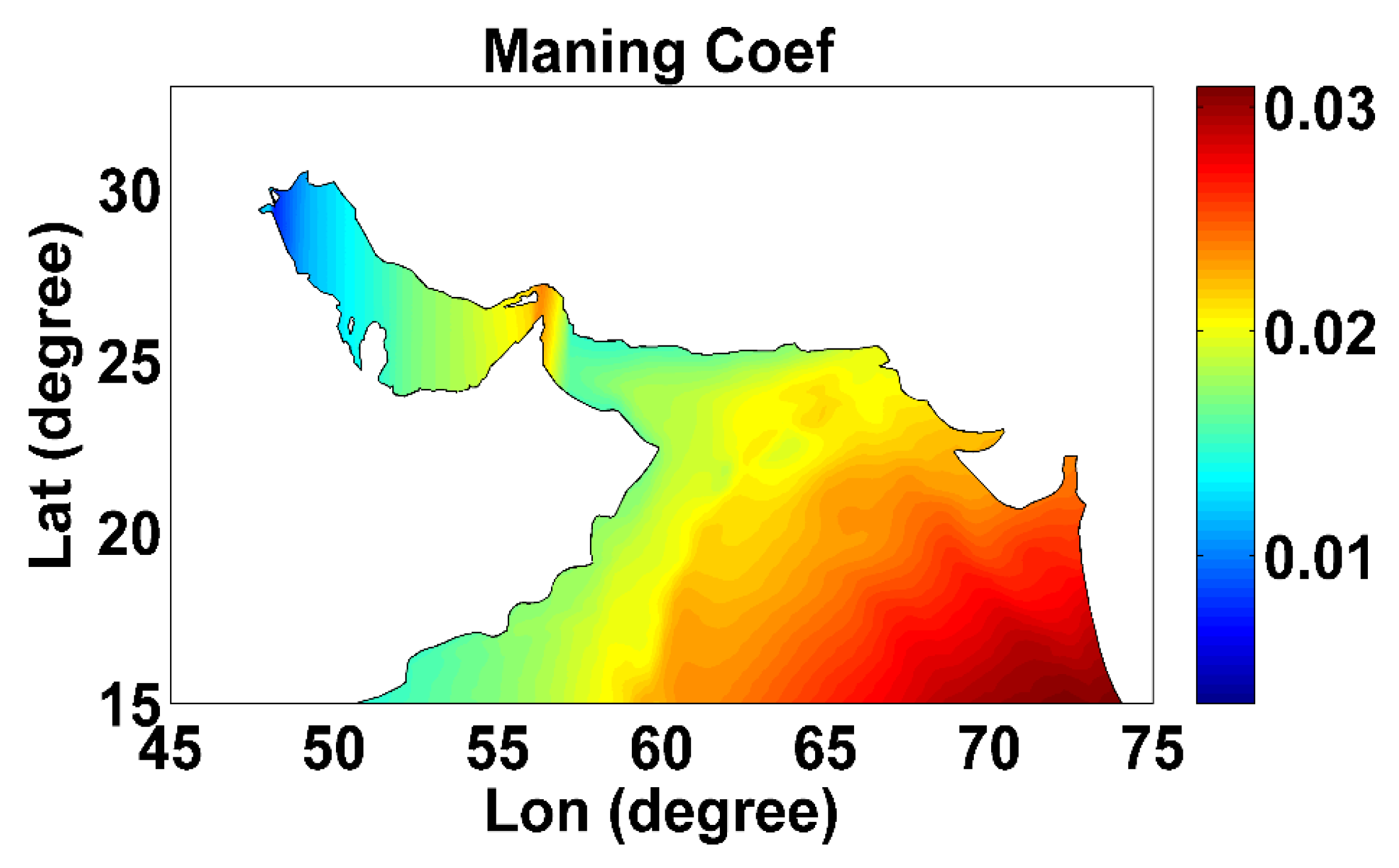
Manning’s coefficient of 0.03 was applied for the bed resistance
After the above preparations, the time step for the numerical solution of the Navier–Stokes equation should be introduced into the program. This actually depends on the type of numerical method, as well as the dimensions and size of meshes used for discretization [
31]. The interval chosen for the time step was between 0.01 and 1800 s in accordance with the stability criteria of the model, and the time step of running the model was 60 s.
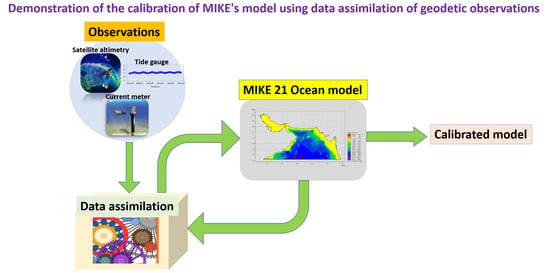
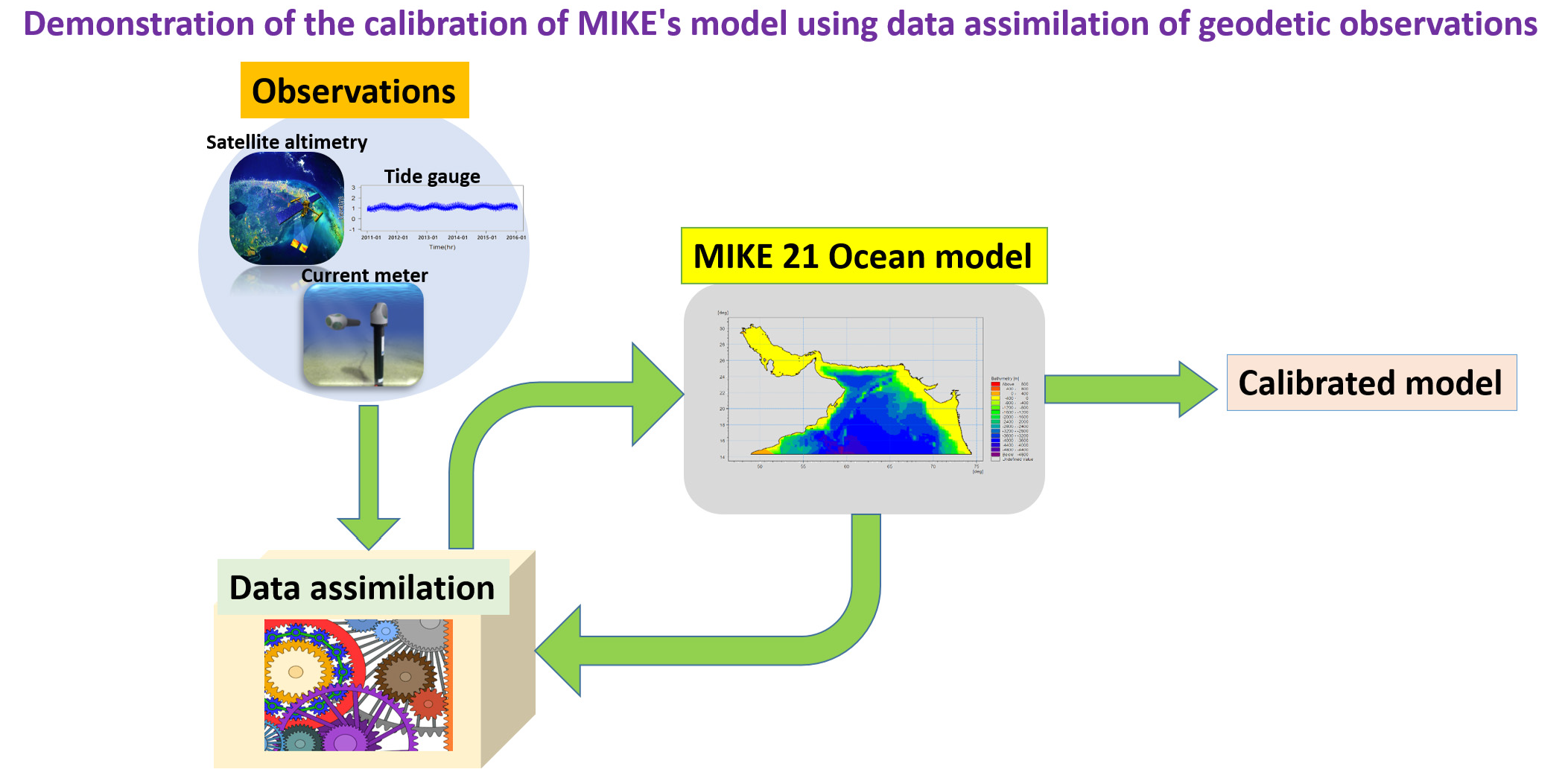
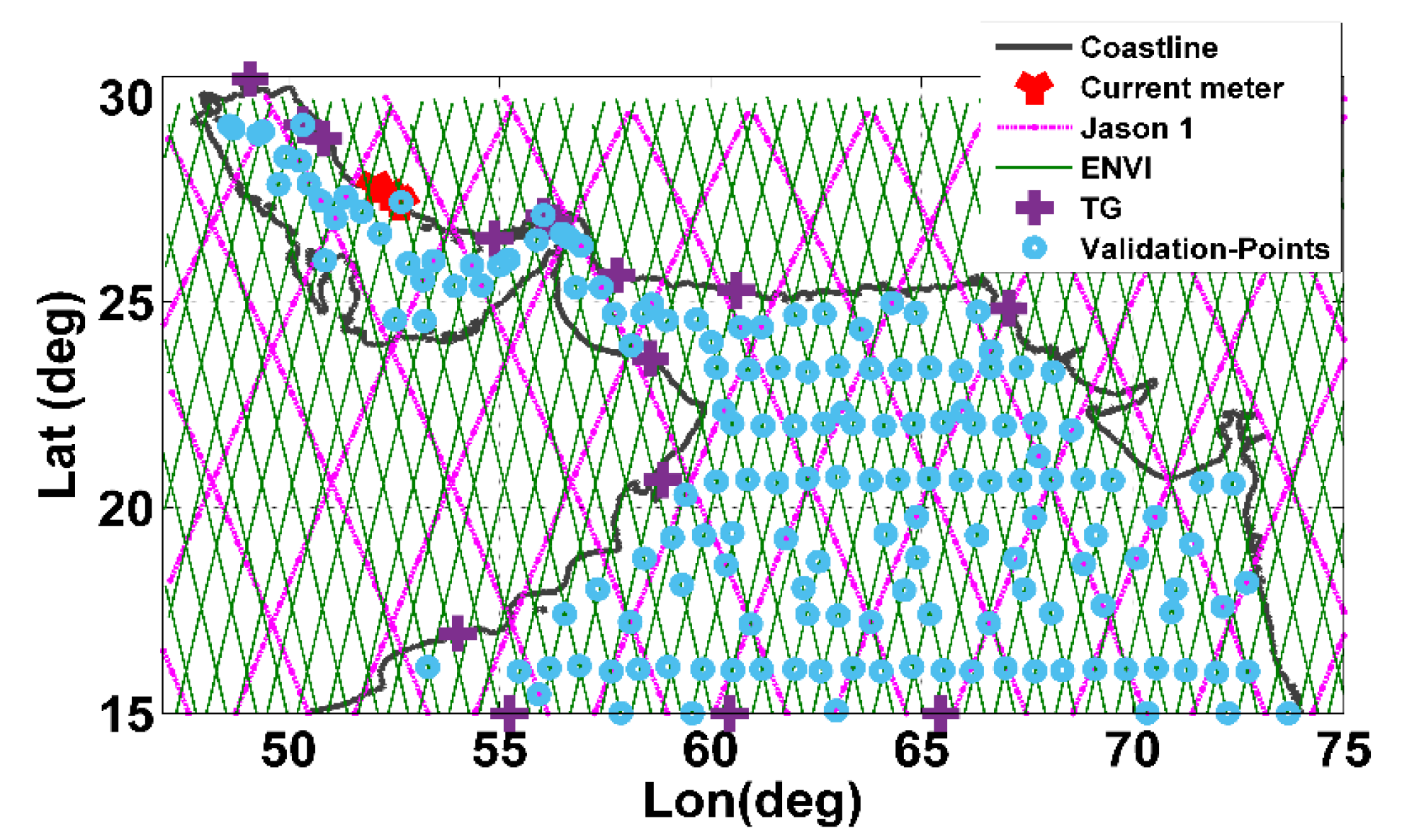
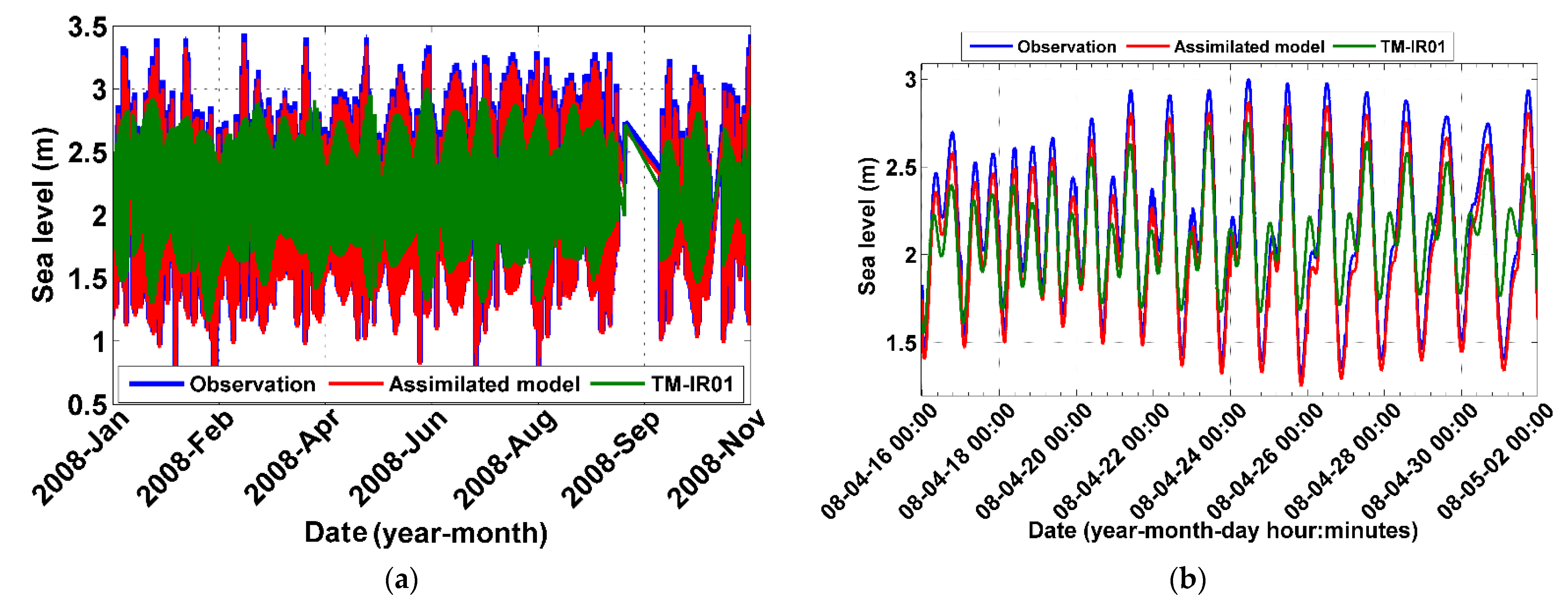
After introducing the required parameters into the MIKE 21 model, one could run the model to compute the SSCs and SLH. However, as it was discussed, here we tried to calibrate the model using a variational data assimilation procedure with the aid of local data, including coastal tide gauges (
Table 1), current meters (
Table 2), and satellite altimetry data (
Table 3). In this case, a weighted objective function was defined, and that function was minimized using various optimization techniques [
32]. The objective function J, based on the errors of force field (
ef), initial conditions (
ei), boundary conditions (
eb), in situ measurements (
e), and the model (
em), was defined as follows [
33]:
In the above equation, F is the estimated force field, f is the initial force field (including the wind force, tides, and friction force parameters), Cf is the covariance matrix of the force field, I is the estimated initial conditions, i is the initial conditions (including the SLH and SSC components), Ci is the covariance matrix of the initial conditions, B is the estimated boundary conditions, b is the boundary conditions (including SLH data), Cb is the covariance matrix of the boundary conditions, y is the observations for data assimilation (including SLH and SSC components), H is the interpolation operator or observation operator, Cy is the covariance matrix of the data assimilation observations, xa is the assimilated model, Cm is the covariance matrix of the model, and xm is the output of the numerical model, including the SLH and SSC components derived from the MIKE model.
The error
ef may arise from errors in surface wind forcing. It may also arise from simplifications in equations of motion, such as hydrostatic approximation or parametrization of turbulent mixing. The initial and boundary errors (
ei and
eb) usually arise from errors in observation. Errors in the model occur due to discretization and numerical calculations, which have a solely mathematical nature [
33].
In the next step, the covariance matrices for the force field (
Cf) [
33], initial and boundary conditions (
Ci and
Cb), observations (
Cy), and model or background (
Cm) were constructed. For the covariance matrix of the force field, including the covariance matrix of the wind (
CWind Force), the covariance matrix of the tidal force (
CTidal Potential), and the covariance matrix of the bed resistance (
CBed Resistance), one could write:
Thus, we first needed to formulate the covariance matrix of the wind observations in the study area, which were in the form of a gridded time series. In addition, for
CTidal Potential, we used the standard deviation of the tidal components, which were specified in the TM-IR01 model. The unit weight was considered for
CBed Resistance. To this end, the covariance matrix of the wind was formed using a spatio-temporal empirical covariance function:
in which
a,
b,
c, and
d are constant coefficients, and
are the spatial and temporal steps, respectively [
34].
In order to determine the covariance matrix of the initial conditions, which included the SLH observations (
Csea level) and the horizontal components of the SSC (
Cu and
Cv), (the initial conditions (SLH, u, and v) were in the form of a gridded file at the initial time), we used a spatial empirical covariance function (
Cs) to determine the covariance of each observation [
35]. Thus, one could write:
To form the covariance matrix of the boundary conditions (Cb in Equation (1)), we set Cb = CTG, namely it was equal to the covariance matrix of the tide gauge observations. As it was discussed, the SLH observations from tide gauge stations were used as boundary conditions. To this end, for the covariance matrix of the tide gauge observations, the average of the SLH time series (MSL) was first subtracted from the SLH time series (SLA = SLH-MSL, which is a residual time series), and then its standard deviation was considered as the covariance matrix of the boundary conditions (Cb).
Finally, the covariance matrix of the observations in the data assimilation procedure, including satellite altimetry observations (
Csea level ALT), coastal tide gauge observations (
Csea level TG), and in situ current meter observations (
Cu and
Cv), was considered as follows:
Since altimetry, tide gauge, and current observations were in the form of time series, matrices Csea level ALT, Csea level TG, Cu, and Cv could be formed by taking the standard deviation of their residual time series in a similar manner to explained for Cb. As it was seen, the computation of Cu and Cv for Cy was different from the computation of Cu and Cv for Ci.
Identifying the covariance matrix of the model or background was another challenge of the present study. During the data assimilation process, it is very important to have a correct estimation of this matrix. In situ observations are used to control how information from the model space is spread out by the components of the background covariance matrix [
36]. In terms of size, when a model error is large, a greater weight is given to the data assimilation observations. In order to form the covariance matrix of a model, various methods have been proposed. In this study, the covariance matrix of the model was determined using the NMC method [
37]. The variance–covariance matrix of the model was built through the comparison of 48 h forecasts of the model with 24 h forecasts of the model at a certain time (that is, using different initial and boundary conditions at different times for forecasting at the same specific time) [
32]. Thus, one could write:
In the above relation,
x48 and
x24 are, respectively, the 48 h and 24 h predictions of the model at a certain time; the upper bar indicates averaging over time or space;
xtrue is the correct value of the model (without error and bias); and
and
are the respective random errors. We also assumed that there was no bias or that the bias was constant over time (
b48 =
b24). As a result, the forecast difference could be expressed as follows [
37]:
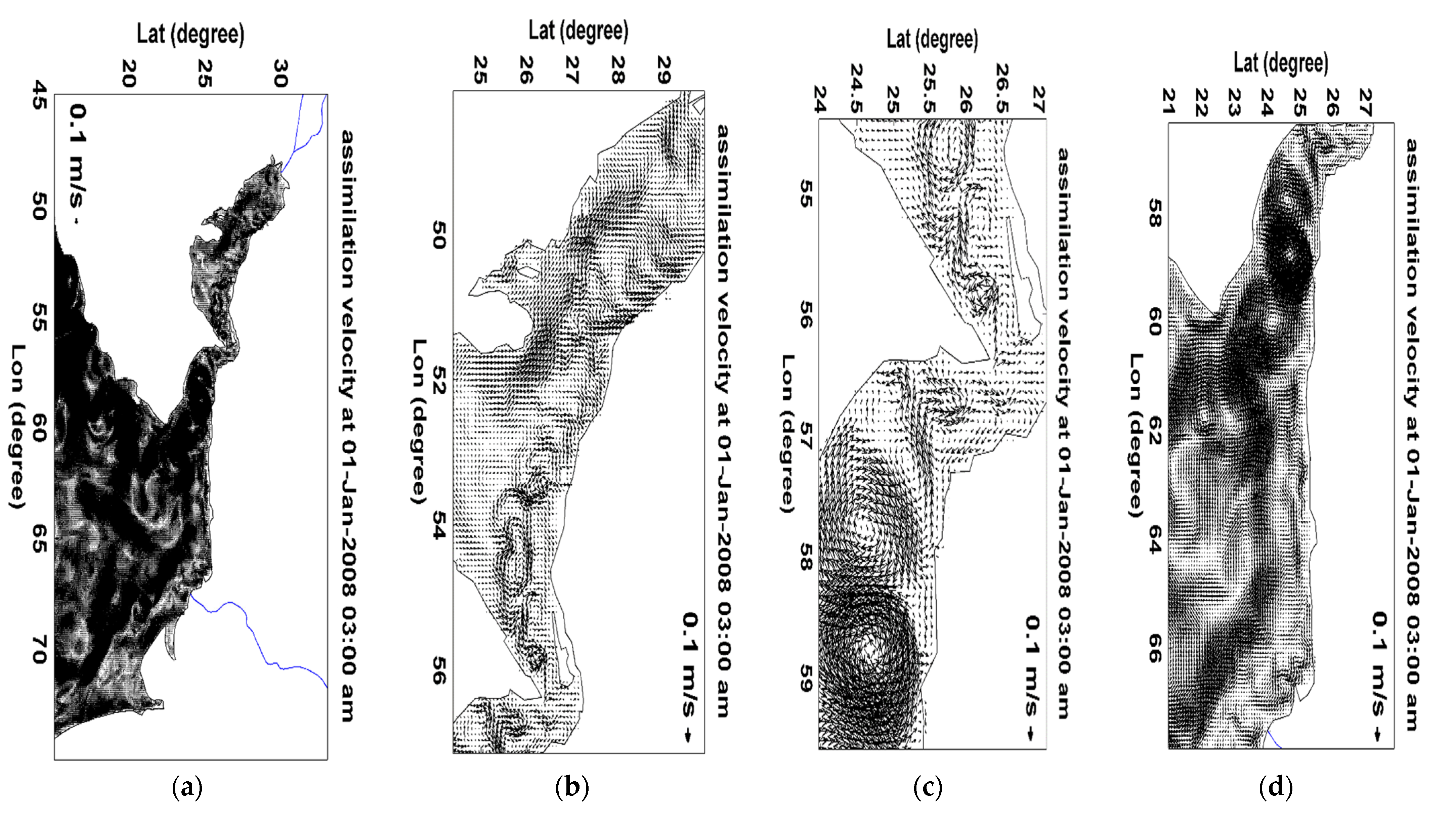
All of the above covariance matrices were considered as the initial values, and they were updated in an iterative way through the calibration and optimization procedures. In order to perform the process of calibration and data assimilation of the observations, we used MATLAB version 9.6 toolbox from the DHI company. This toolbox is able to link all output and input files of the MIKE 21 model to MATLAB software. In this way, by connecting the inputs and outputs of the MIKE model, the optimization process of the model was performed. MATLAB was used to create the objective function of Equation (1) in an iterative process by changing the input values of the MIKE model and rerunning the model until the model achieved acceptable accuracy [
38].























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}