
3D Sea Surface Electromagnetic Scattering Prediction Model Based on IPSO-SVR

Abstract
:1. Introduction
2. Materials and Methods
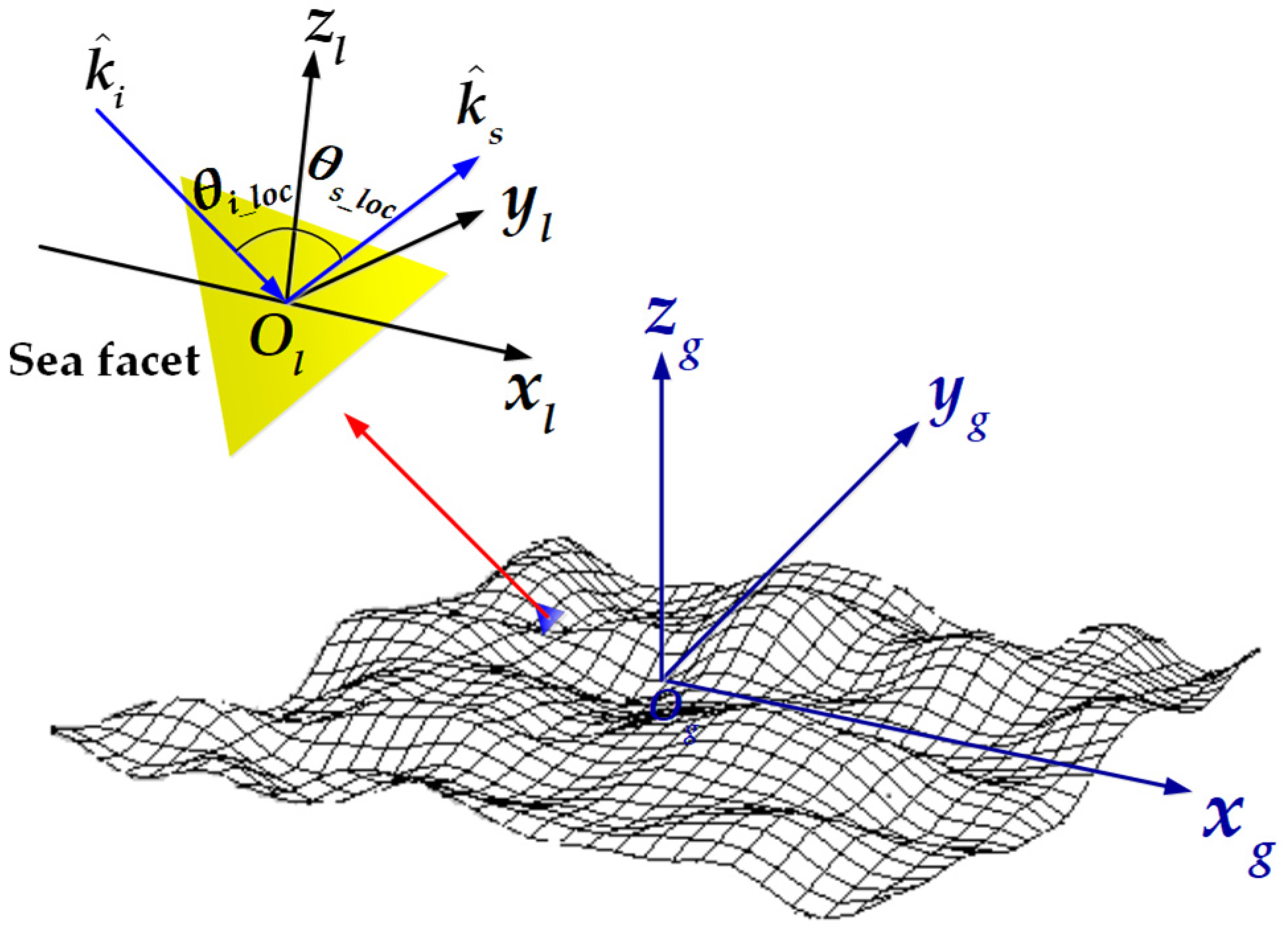
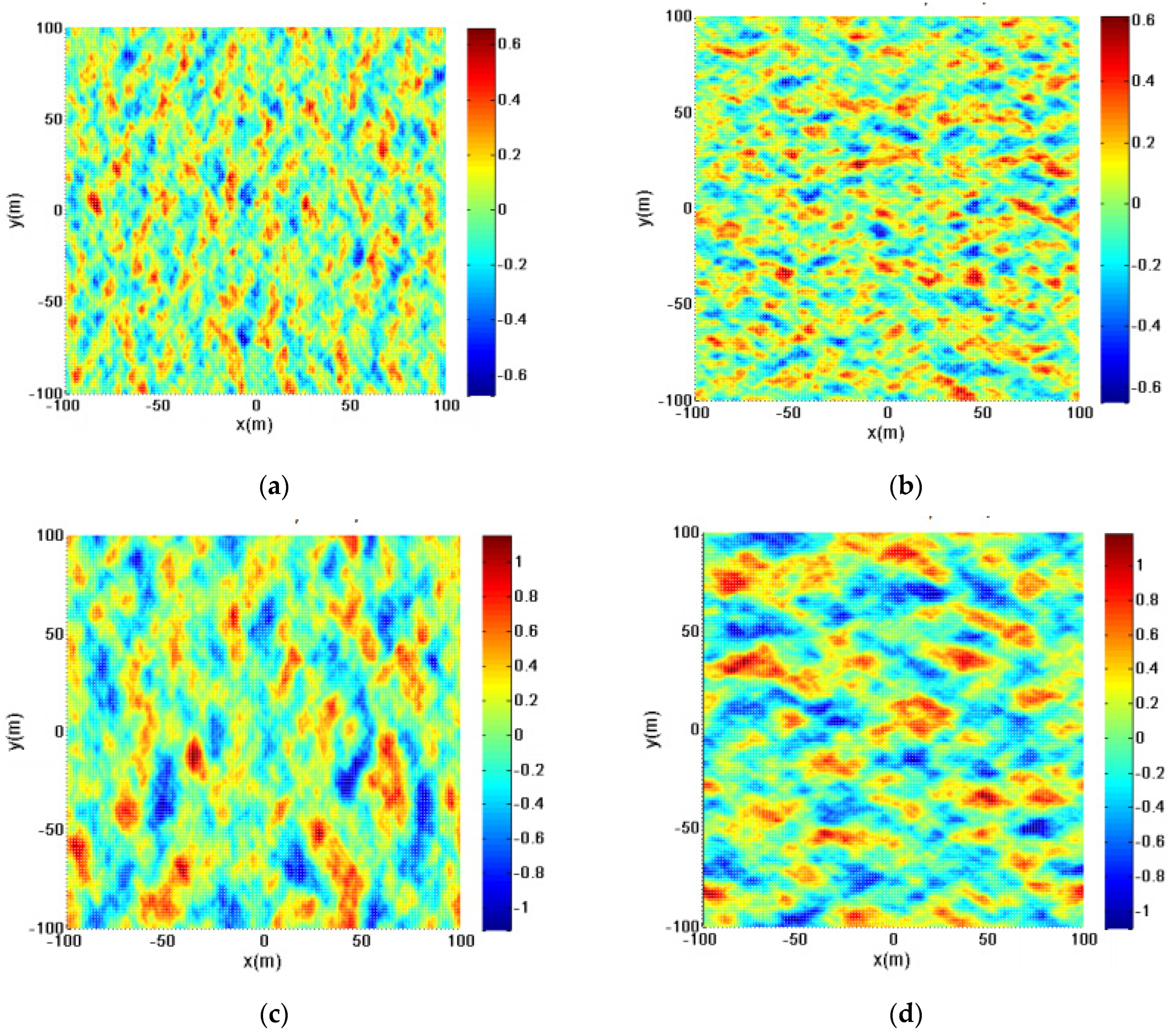
2.1. EM Scattering Modeling of the 3D Sea Surface Based on SDFSM
2.2. Support Vector Regression Machine Optimized by IPSO Algorithm
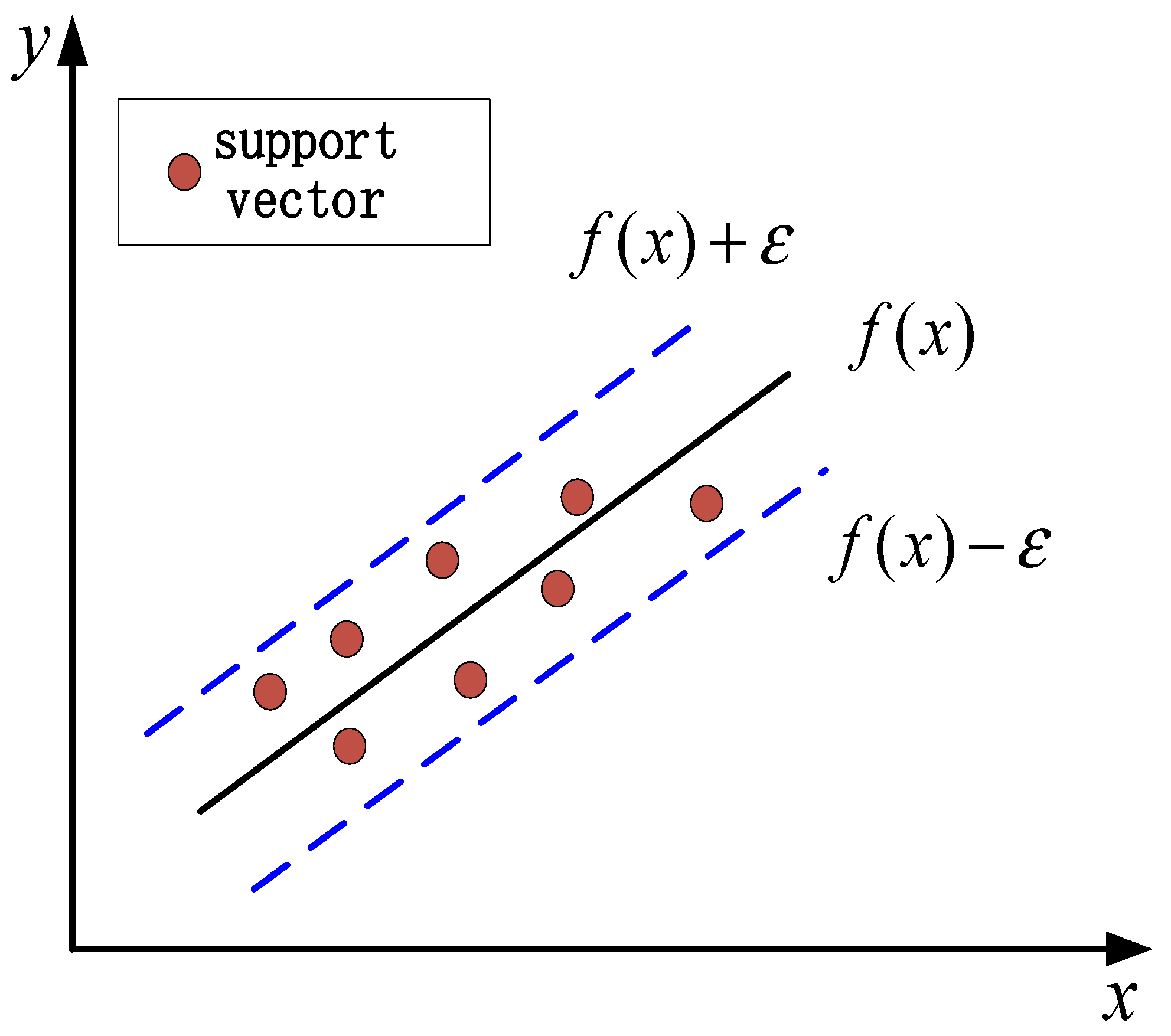
2.2.1. Basic Principles of SVR
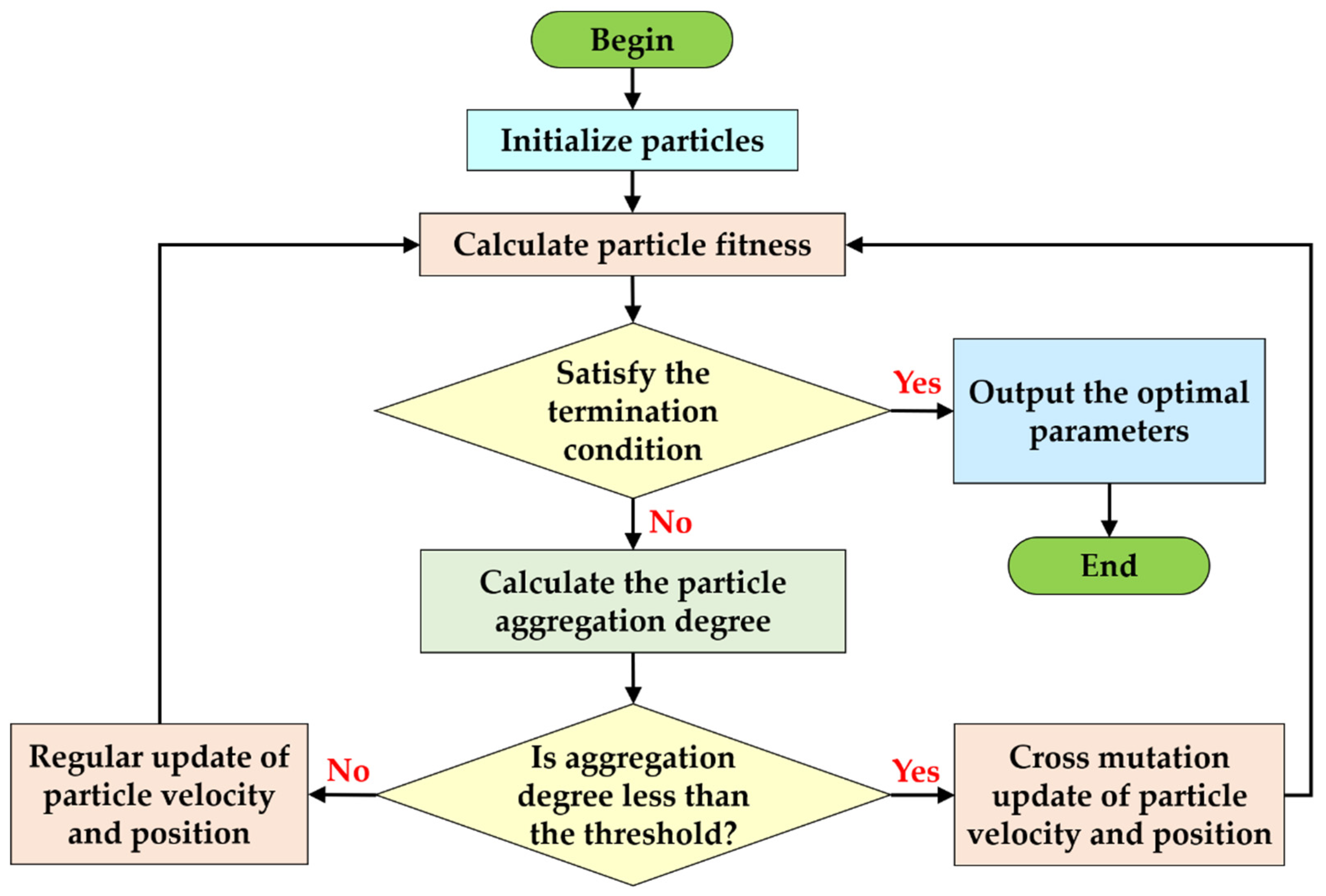
2.2.2. IPSO Algorithm
- (1)
- Population initialization
- (2)
- Judgment of aggregation degree
- (3)
- Particle update
- (1)
- Initialization settings: The population is initialized by using the logistic map;
- (2)
- Fitness evaluation: According to the fitness function, the fitness value of the particles is calculated;
- (3)
- Judgment of : In the iterative process, is calculated. If the is less than the given threshold, the particles are updated according to Equation (19), otherwise, the particles are updated according to Equation (18);
- (4)
- Termination condition judgment: The number of iteration steps is increased by 1, and the above steps are looped until there is a solution that meets the termination condition in the new population.
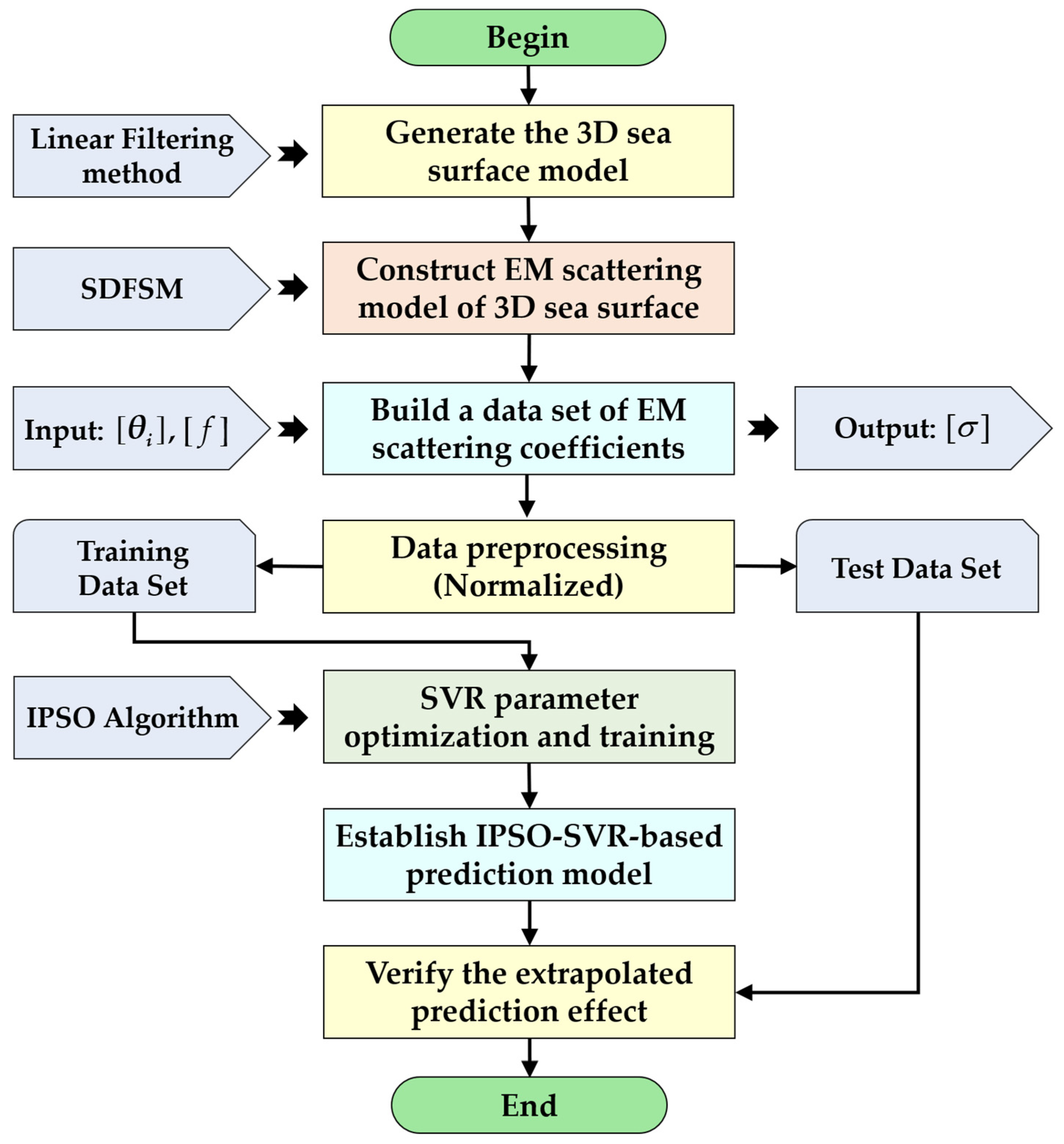
2.3. Establish the IPSO-SVR-Based Prediction Model
3. Results and Discussion
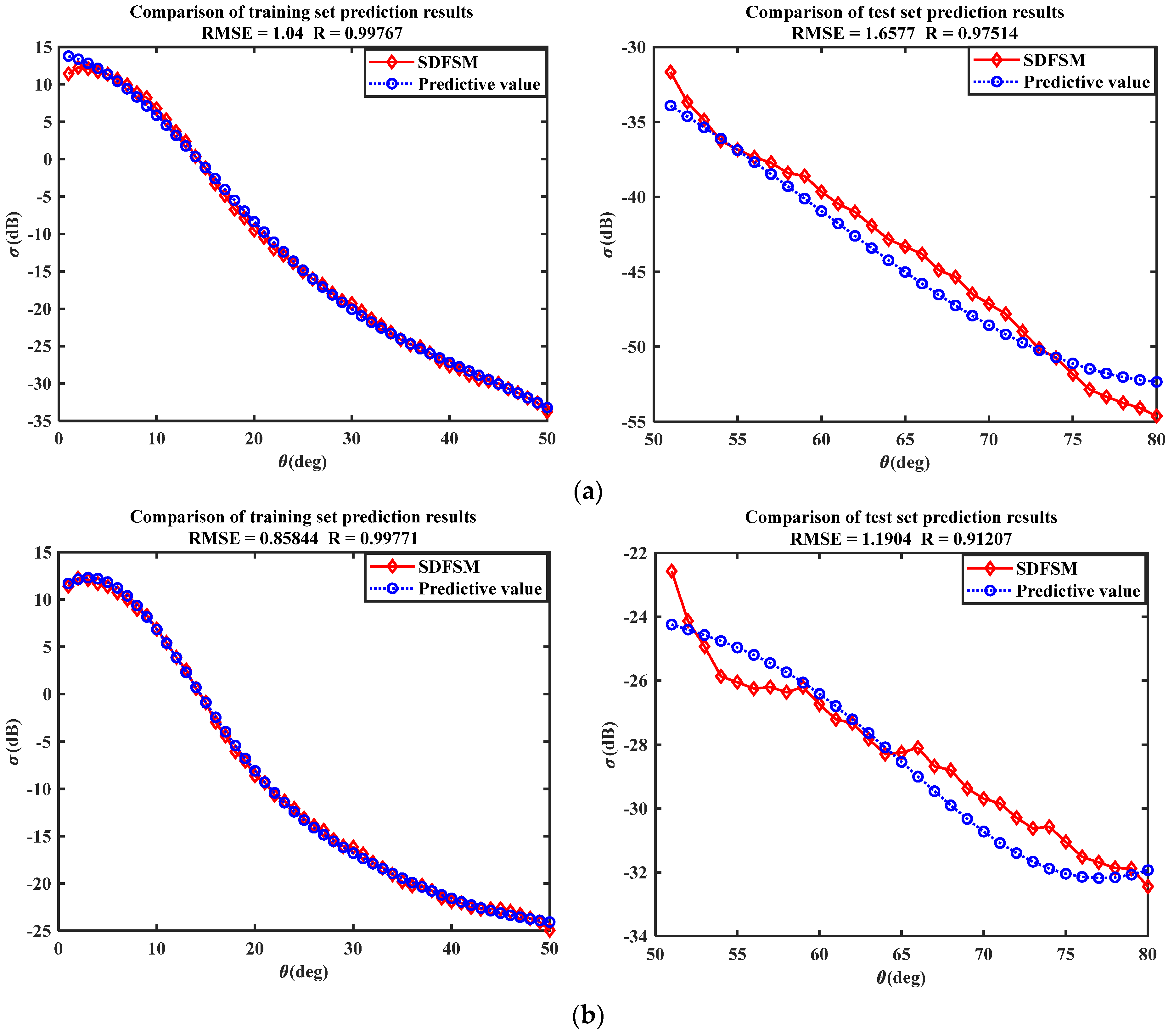
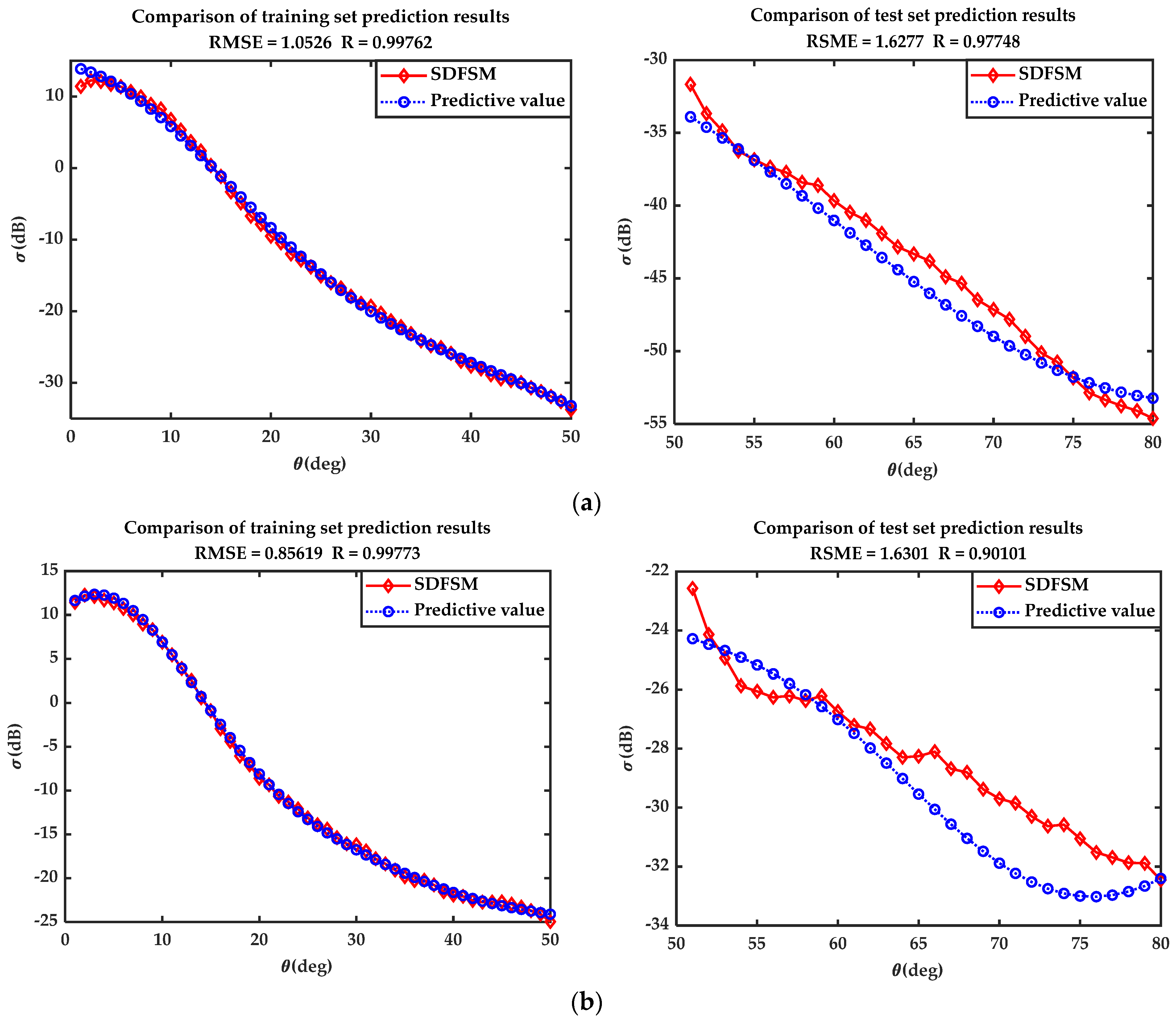
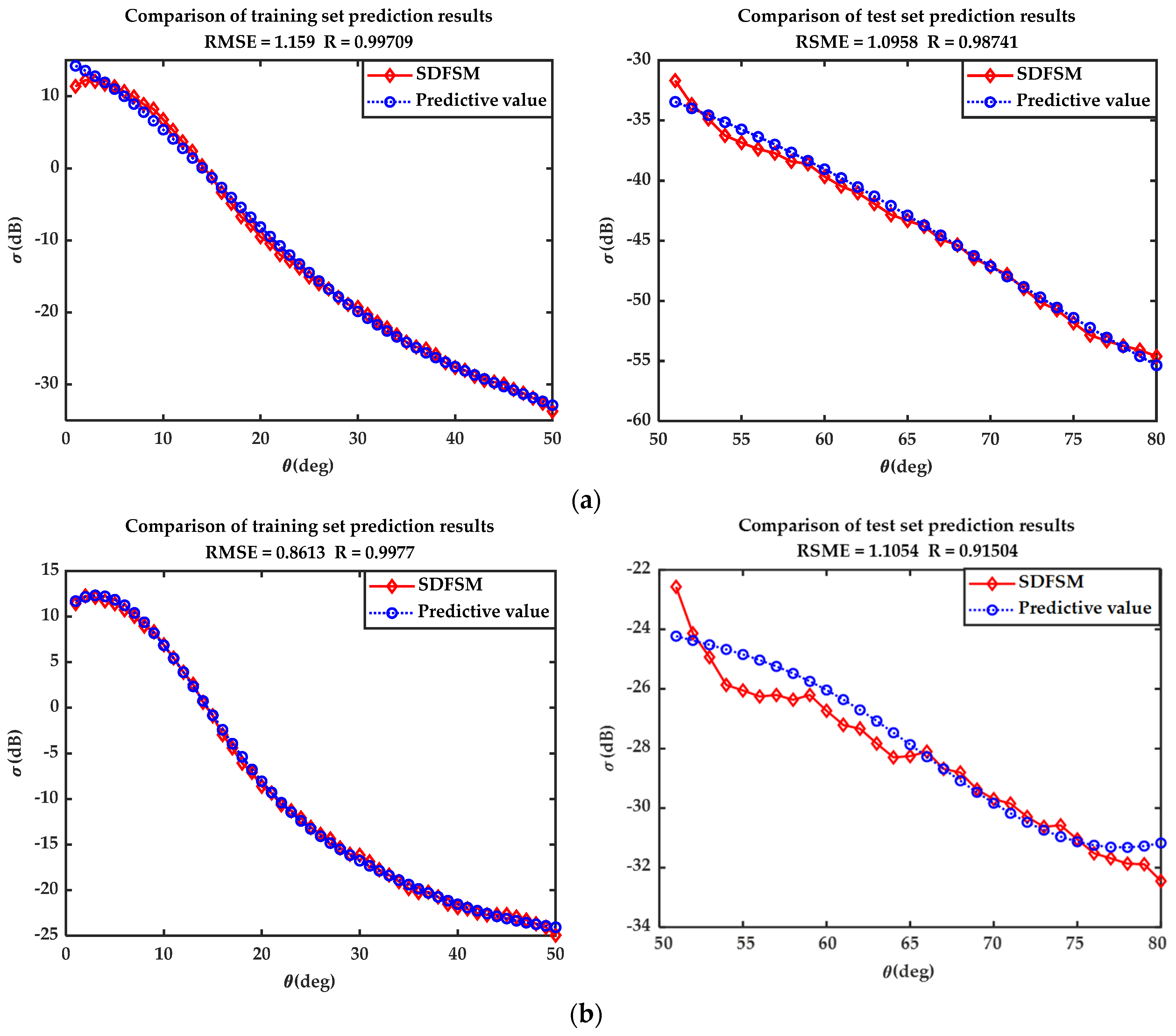
3.1. Prediction Results of the Backscattering Coefficient Changing with the Incident Angle
3.2. Comparison of the Prediction Accuracy
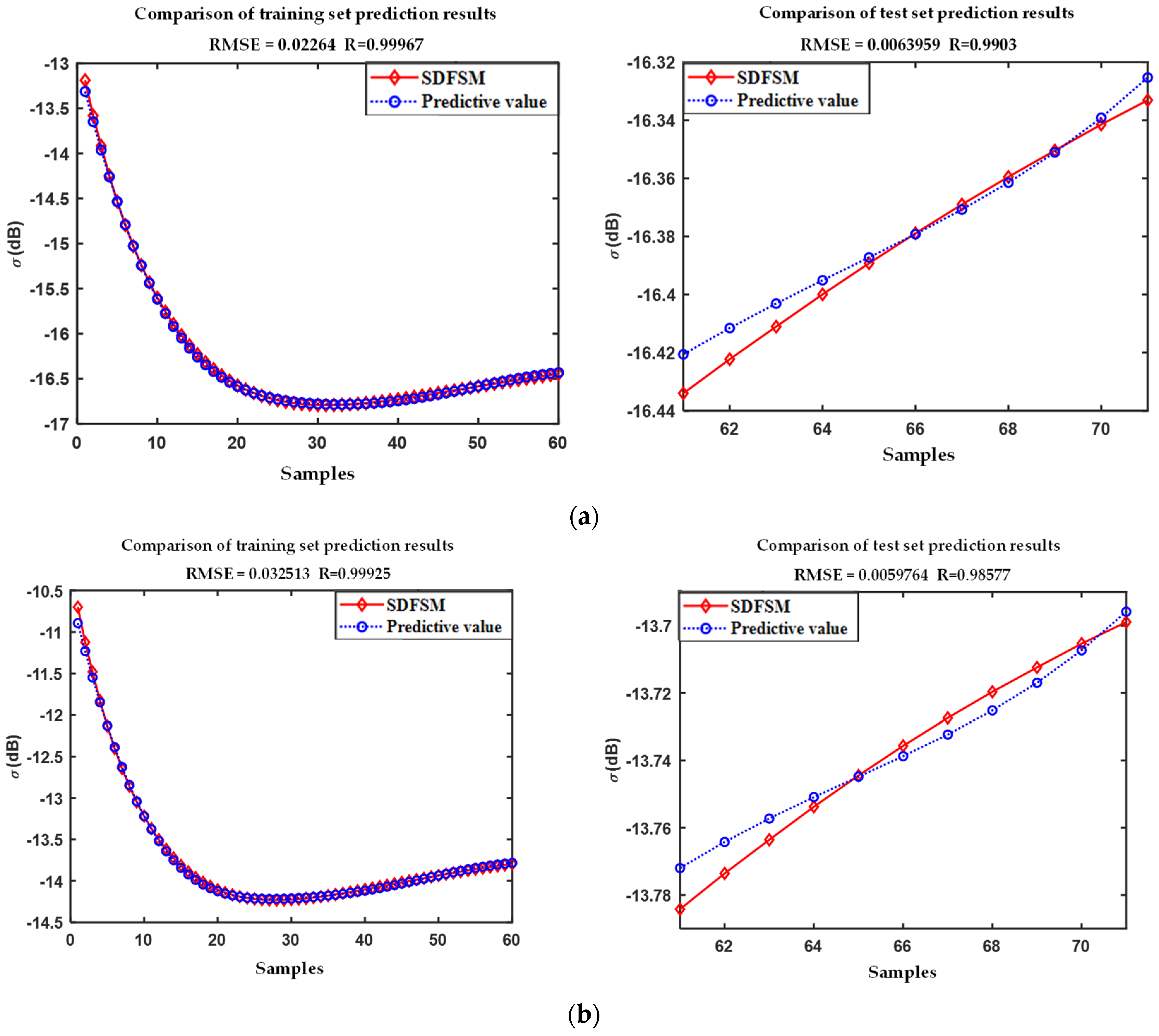
3.3. Prediction Results of the Backscattering Coefficient Varying with the Frequency
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ditterrich, T.G. Machine Learning Research: Four Current Direction. Artif. Intell. Magzine 1997, 4, 97–136. [Google Scholar]
- Harrington, R.F.; Harrington, J.L. Field Computation by Moment Methods; Macmillan: New York, NY, USA, 1968. [Google Scholar]
- Wang, K.C.; He, Z.; Ding, D.Z.; Chen, R.S. Uncertainty Scattering Analysis of 3-D Objects with Varying Shape Based on Method of Moments. IEEE Trans. Antennas Propag. 2019, 67, 2835–2840. [Google Scholar] [CrossRef]
- Liu, S.; Zou, B.; Zhang, L. An FDTD-Based Method for Difference Scattering from a Target Above a Randomly Rough Surface. IEEE Trans. Antennas Propag. 2020, 69, 2427–2432. [Google Scholar] [CrossRef]
- Lai, Z.-H.; Kiang, J.-F. Dispersive FDTD Scheme and Surface Impedance Boundary Condition for Modeling Pulse Propagation in Very Lossy Medium. IEEE Trans. Antennas Propag. 2020, 68, 3060–3067. [Google Scholar] [CrossRef]
- Burrage, D.M.; Anguelova, M.D.; Wang, D.W.; Wesson, J.C. Modeling L-Band Reflection and Emission from Seawater, Foam, and Whitecaps Using the Finite-Difference Time-Domain Method. IEEE Geosci. Remote Sens. Lett. 2018, 16, 682–686. [Google Scholar] [CrossRef]
- Ozgun, O.; Kuzuoglu, M. A Domain Decomposition Finite-Element Method for Modeling Electromagnetic Scattering From Rough Sea Surfaces With Emphasis on Near-Forward Scattering. IEEE Trans. Antennas Propag. 2018, 67, 335–345. [Google Scholar] [CrossRef]
- Franco, M.; Barber, M.; Maas, M.; Bruno, O.; Grings, F.; Calzetta, E. Validity of the Kirchhoff Approximation for the Scattering of Electromagnetic Waves from Dielectric, Doubly Periodic Surfaces. J. Opt. Soc. Am. A 2017, 34, 2266–2277. [Google Scholar] [CrossRef]
- Tian, J.; Tong, J.; Shi, J.; Gui, L. A New Approximate Fast Method of Computing the Scattering from Multilayer Rough Surfaces Based on the Kirchhoff Approximation. Radio Sci. 2017, 52, 186–195. [Google Scholar] [CrossRef]
- Afifi, S.; Dusséaux, R. Scattering from 2-D Perfect Electromagnetic Conductor Rough Surface: Analysis with the Small Perturbation Method and the Small-Slope Approximation. IEEE Trans. Antennas Propag. 2017, 66, 340–346. [Google Scholar] [CrossRef]
- Wang, T.; Tong, C. An Improved Facet-Based TSM for Electromagnetic Scattering from Ocean Surface. IEEE Geosci. Remote Sens. Lett. 2018, 15, 644–648. [Google Scholar] [CrossRef]
- Di Martino, G.; Iodice, A.; Riccio, D. Closed-Form Anisotropic Polarimetric Two-Scale Model for Fast Evaluation of Sea Surface Backscattering. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6182–6194. [Google Scholar] [CrossRef]
- Pinel, N.; Bourlier, C.; Sergievskaya, I.; Longépé, N.; Hajduch, G. Asymptotic Modeling of Three-Dimensional Radar Backscattering from Oil Slicks on Sea Surfaces. Remote Sens. 2022, 14, 981. [Google Scholar] [CrossRef]
- Li, J.; Zhang, M.; Wei, P.; Jiang, W. An Improvement on SSA Method for EM Scattering from Electrically Large Rough Sea Surface. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1144–1148. [Google Scholar] [CrossRef]
- Jiang, W.; Zhang, M.; Zhao, Y.; Nie, D. EM Scattering Calculation of Large Sea Surface with SSA Method at S, X, Ku, and K Bands. Waves Random Complex Media 2017, 27, 171–184. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, H.; Yin, H.-C. Facet-Based Investigation on EM Scattering from Electrically Large Sea Surface with Two-Scale Profiles: Theoretical Model. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1967–1975. [Google Scholar] [CrossRef]
- Zhao, H.; Guo, L.; Chen, T.; Liu, W. Electromagnetic Scattering of Coated Objects Over Sea Surface Based on SBR-SDFSM. J. Electromagn. Waves Appl. 2017, 32, 1079–1092. [Google Scholar] [CrossRef]
- Wright, J. A New Model for Sea Clutter. IRE Trans. Antennas Propag. 1968, 16, 217–223. [Google Scholar] [CrossRef]
- Vapnik, V. Statistical Learning Theory; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Zhang, T.; Huang, X.; Wen, D.; Li, J. Urban Building Density Estimation from High-Resolution Imagery Using Multiple Features and Support Vector Regression. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3265–3280. [Google Scholar] [CrossRef]
- Cao, L.; Xu, L.; Goodman, E.D.; Bao, C.; Zhu, S. Evolutionary Dynamic Multiobjective Optimization Assisted by a Support Vector Regression Predictor. IEEE Trans. Evol. Comput. 2019, 24, 305–319. [Google Scholar] [CrossRef]
- Yan, J.; Chen, X.; Yu, Y.; Zhang, X. Application of a Parallel Particle Swarm Optimization-Long Short-Term Memory Model to Improve Water Quality Data. Water 2019, 11, 1317. [Google Scholar] [CrossRef]
- Erfani, S.M.; Rajasegarar, S.; Karunasekera, S.; Leckie, C. High-Dimensional and Large-Scale Anomaly Detection Using a Linear One-Class SVM with Deep Learning. Pattern Recognit. 2016, 58, 121–134. [Google Scholar] [CrossRef]
- Liu, S.; Chen, Y.; Luo, C.; Jiang, H.; Li, H.; Li, H.; Lu, Q. Particle Swarm Optimization-Based Variational Mode Decomposition for Ground Penetrating Radar Data Denoising. Remote Sens. 2022, 14, 2973. [Google Scholar] [CrossRef]
- Fong, S.; Wong, R.; Vasilakos, A.V. Accelerated PSO Swarm Search Feature Selection for Data Stream Mining Big Data. IEEE Trans. Serv. Comput. 2015, 9, 1. [Google Scholar] [CrossRef]
- Jain, N.K.; Nangia, U.; Jain, J. A Review of Particle Swarm Optimization. J. Inst. Eng. Ser. B 2018, 99, 407–411. [Google Scholar] [CrossRef]
- Shami, T.M.; El-Saleh, A.A.; Alswaitti, M.; Al-Tashi, Q.; Summakieh, M.A.; Mirjalili, S. Particle Swarm Optimization: A Comprehensive Survey. IEEE Access 2022, 10, 10031–10061. [Google Scholar] [CrossRef]
- Kramer, O. Genetic Algorithm Essentials; Springer: Cham, Switzerland, 2017; Volume 679. [Google Scholar]
- Chen, Y.-J.; Zhang, Q.; Luo, Y.; Chen, Y.-A. Measurement Matrix Optimization for ISAR Sparse Imaging Based on Genetic Algorithm. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1875–1879. [Google Scholar] [CrossRef]
- Fuks, I.M.; Voronovich, A.G. Wave Diffraction by Rough Interfaces in an Arbitrary Plane-Layered Medium. Waves Random Media 2000, 10, 253. [Google Scholar] [CrossRef]
- Fuks, I.M. Wave Diffraction by a Rough Boundary of an Arbitrary Plane-Layered Medium. IEEE Trans. Antennas Propag. 2001, 49, 630–639. [Google Scholar] [CrossRef]
- Bass, F.; Fuks, I.; Kalmykov, A.; Ostrovsky, I.; Rosenberg, A. Very High Frequency Radiowave Scattering by a Disturbed Sea Surface Part I: Scattering from a Slightly Disturbed Boundary. IEEE Trans. Antennas Propag. 1968, 16, 554–559. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, Z.-S.; Su, X. Electromagnetic Scattering from Deterministic Sea Surface with Oceanic Internal Waves via the Variable-Coefficient Gardener Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 11, 355–366. [Google Scholar] [CrossRef]
- Voronovich, A.G.; Zavorotny, V.U. Theoretical Model for Scattering of Radar Signals in Ku- and C-Bands from a Rough Sea Surface with Breaking Waves. Waves Random Media 2001, 11, 247–269. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Rani, M.; Kumar, V. A New Experiment with the Logistic Map. J. Indian Acad. Math. 2005, 27, 143–156. [Google Scholar]
- Rani, M.; Agarwal, R. A New Experimental Approach to Study the Stability of Logistic Map. Chaos Solitons Fractals 2009, 41, 2062–2066. [Google Scholar] [CrossRef]
- Chang, W.-D. A Multi-Crossover Genetic Approach to Multivariable PID Controllers Tuning. Expert Syst. Appl. 2007, 33, 620–626. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Set | Output Y | Input X |
|---|---|---|
| Training data set | : 0°~50°; 51 samples | |
| Test data set | : 51°~80°; 30 samples |
| Model | Polarization | RMSE (dB) (Test Data Set) | Correlation Coefficient R | Average RMSE (dB) (Test Data Set) | Average Correlation Coefficient R |
|---|---|---|---|---|---|
| PSO-SVR | HH | 1.6577 | 97.51% | 1.4241 | 94.36% |
| VV | 1.1904 | 91.21% | |||
| GA-SVR | HH | 1.6277 | 97.75% | 1.6289 | 93.93% |
| VV | 1.6301 | 90.10% | |||
| IPSO-SVR | HH | 1.0958 | 98.74% | 1.1006 | 95.12% |
| VV | 1.1054 | 91.50% |
| Method | Polarization | Time (s) | Speedup Ratio |
|---|---|---|---|
| SDFSM | HH | 69.2609 | / |
| VV | 69.7452 | / | |
| IPSO-SVR-based Prediction Model | HH | 4.2315 | 16.3679 |
| VV | 4.6147 | 15.1137 |
| Data Set | Output Y | Input X |
|---|---|---|
| Training data set | : 1 GHz~12.8 GHz; 60 samples | |
| Test data set | : 13 GHz~15 GHz; 11 samples |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, C.; Meng, X.; Guo, L.; Hu, J. 3D Sea Surface Electromagnetic Scattering Prediction Model Based on IPSO-SVR. Remote Sens. 2022, 14, 4657. https://doi.org/10.3390/rs14184657
Dong C, Meng X, Guo L, Hu J. 3D Sea Surface Electromagnetic Scattering Prediction Model Based on IPSO-SVR. Remote Sensing. 2022; 14(18):4657. https://doi.org/10.3390/rs14184657
Chicago/Turabian StyleDong, Chunlei, Xiao Meng, Lixin Guo, and Jiamin Hu. 2022. "3D Sea Surface Electromagnetic Scattering Prediction Model Based on IPSO-SVR" Remote Sensing 14, no. 18: 4657. https://doi.org/10.3390/rs14184657