
Establishment and Extension of a Fast Descriptor for Point Cloud Registration
 , , ,
, , ,
Abstract
:1. Introduction
- (1)
- We analyze some typical local invariant features and integrate them into a new descriptor. The proposed descriptor is highly descriptive. It contains rich information by considering angle, dot product, distance, and curvature characteristics.
- (2)
- Our method maintains a high registration accuracy with fast speed and low memory footprint. Besides the original point cloud, only the 32-D descriptor is stored in the memory. Hence, the proposed descriptor is time and memory efficient.
- (3)
- The new method can process directly on the scattered point clouds, which do not require any prior information. It does not need error preprocessing steps which are time-consuming.
2. Methodology
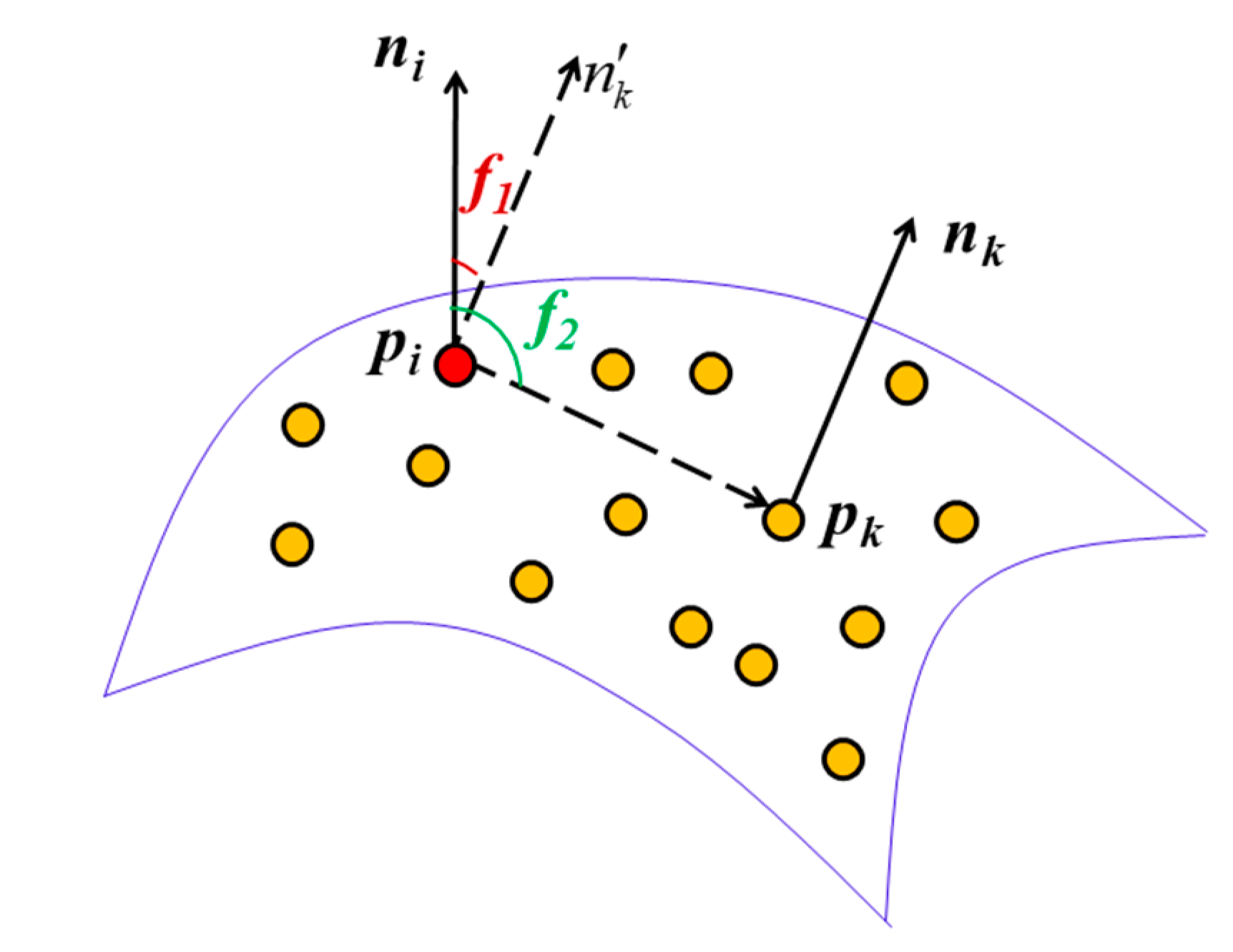
2.1. Definition of Descriptor
2.1.1. Angle between Normals
2.1.2. Dot Product of Normal and Vector from the Point to Its Neighborhood Point
2.1.3. Distance between Neighborhood Points
2.1.4. Curvature Variation
2.2. Matching
2.3. Mismatch Rejection of OSAC
3. Experiments Data
3.1. The Simulation Expriments Datasets
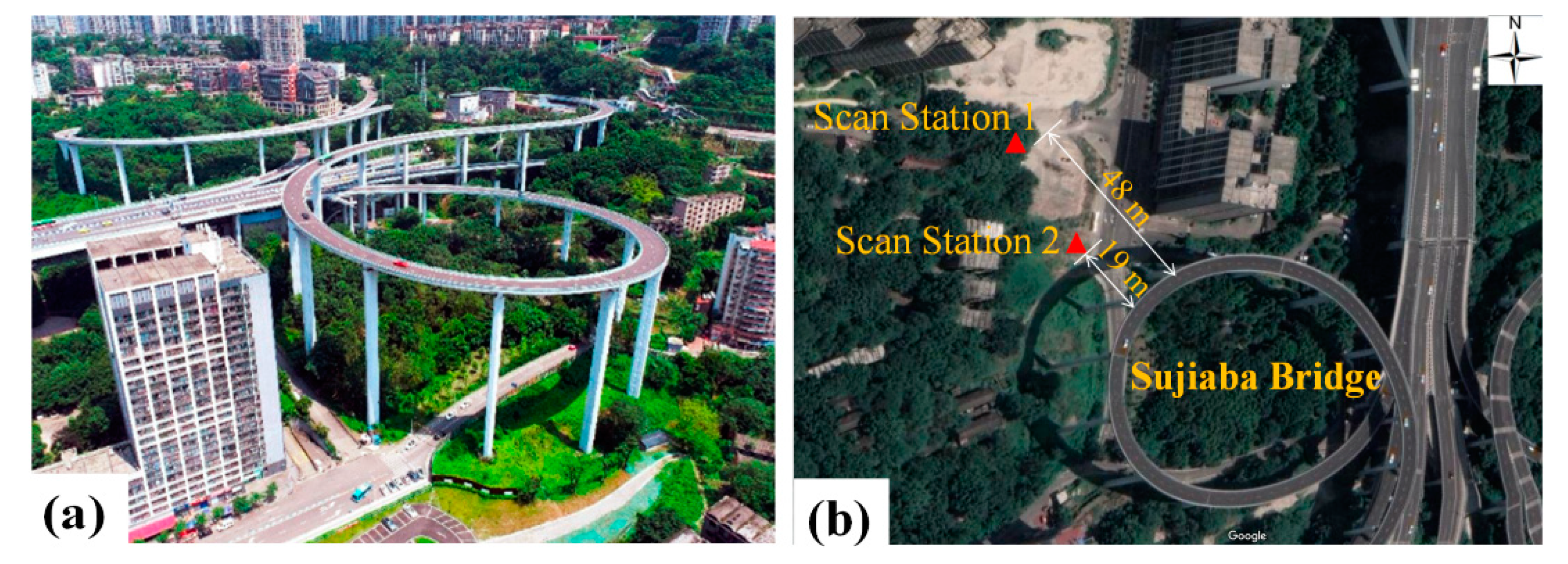
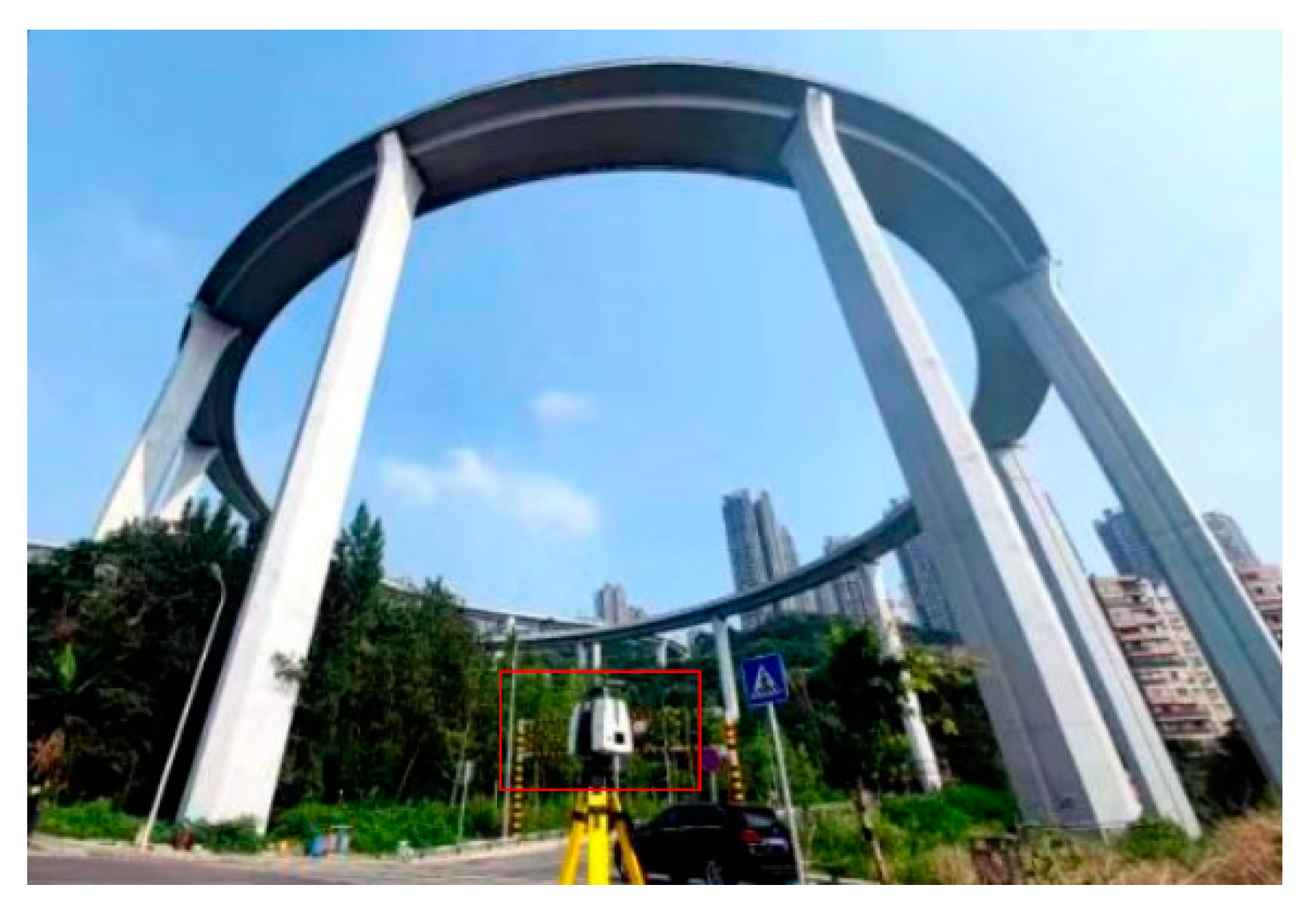
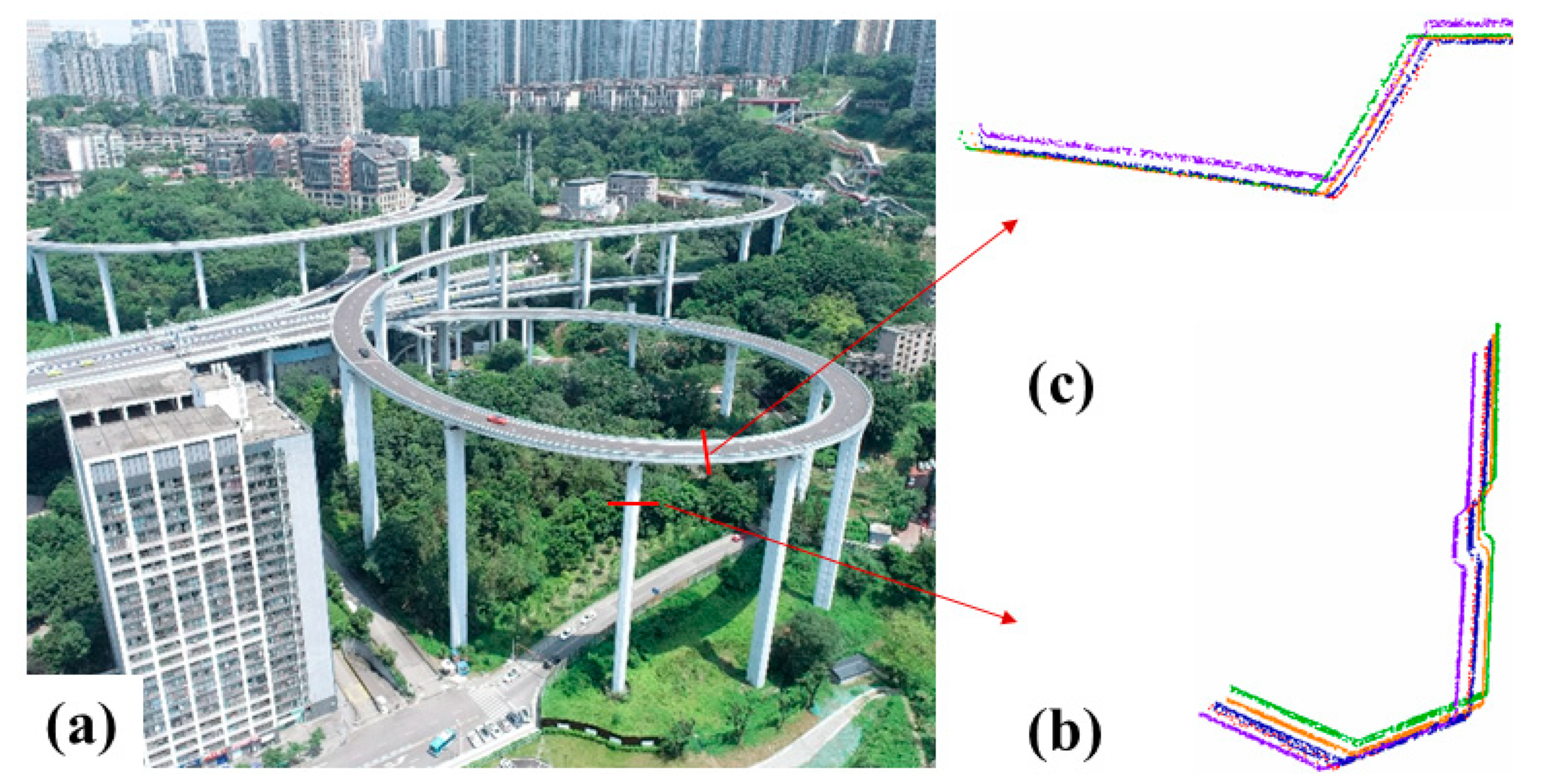
3.2. The Real Experiment Dataset
4. Results and Discussions
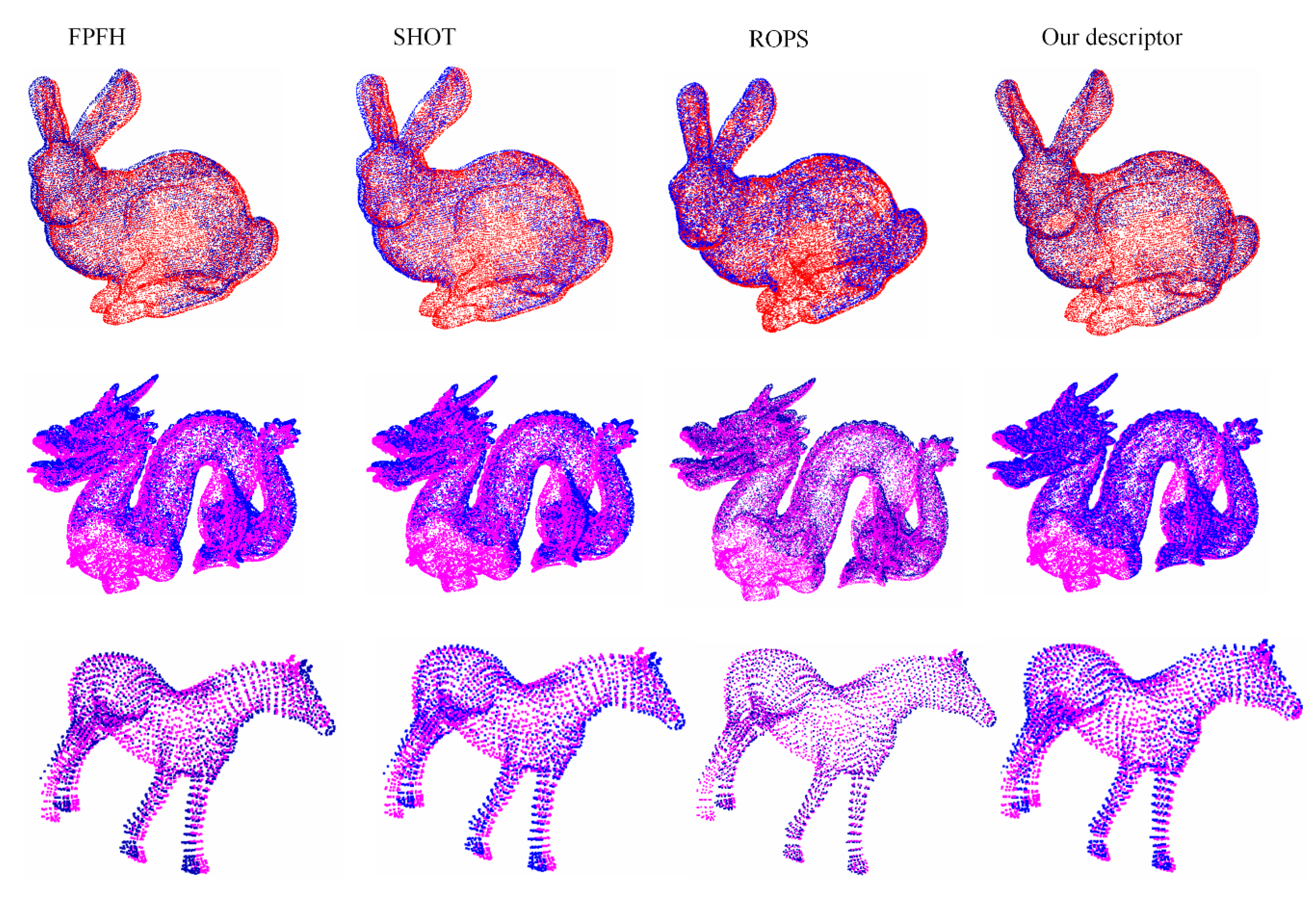
4.1. The Result of Simulation Experiments
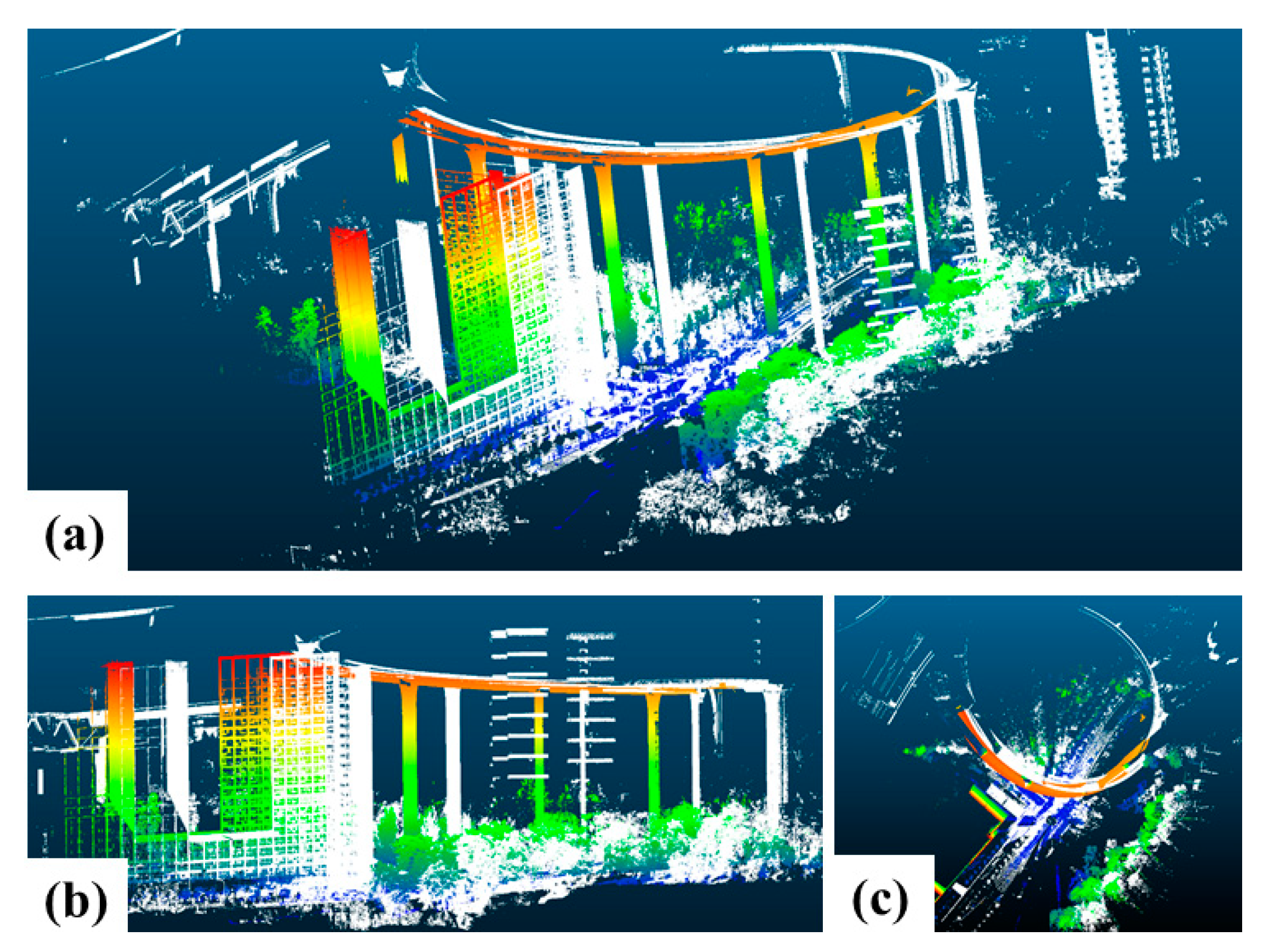
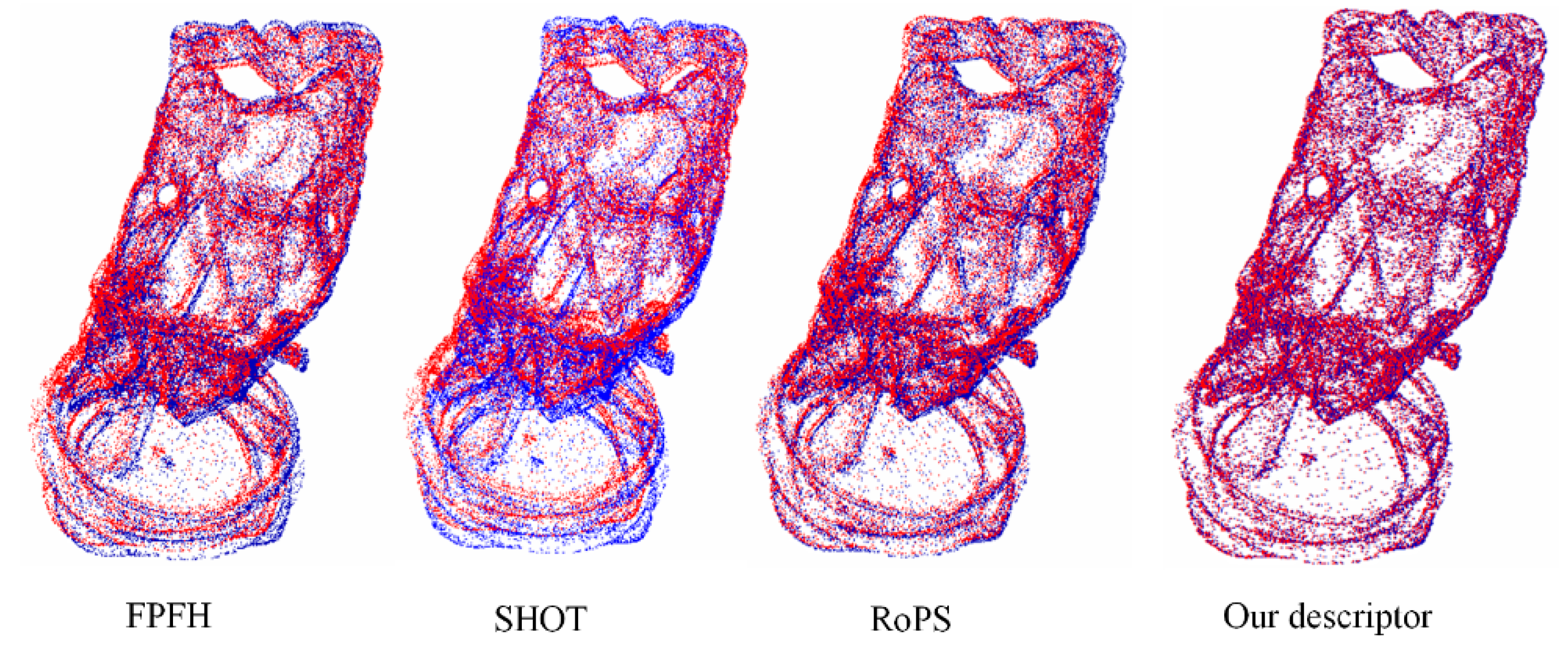
4.2. The Result of Real Experiment
- (1)
- In terms of precision, our method achieves a better performance than FPFH, SHOT, and RoPS. The wrong matching correspondences will occur because of high self-similar features. The classic algorithm RANSAC is mostly used for rejecting mismatches [48,49]. However, the RANSAC struggles to identify the mismatches. Therefore, it still has room for improvement in terms of precision. We selected the typical feature of the point cloud, which is invariant for transformation. Then we integrated the sub-feature into a new comprehensive descriptor. More importantly, we used the OSAC algorithm to eliminate wrong matching correspondences. The test results show that the new descriptor proposed herein has high precision and low dimension. In addition, our method does not rely on the good initial pose of the point cloud. It is practical for real data with unknown orientation.
- (2)
- In terms of consuming time, the well-known descriptors, such as FPFH, SHOT, and RoPS, occupy a large amount of data memory [50,51,52]. Meanwhile, most processes in our method are based on 3D key points. Besides the original point cloud, only the 32D descriptor are stored in the memory. Moreover, FPFH, SHOT, and RoPS have lower matching efficiency because of their feature dimensions [53]. Due to the low memory footprint and high PCR speed, our method has significant advantages.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Remondino, F. From point cloud to surface: The modeling and visualization problem. In Proceedings of the ISPRS WG V/6 Workshop “Visualization and Animation of Reality-Based 3D Models”, Tarasp-Vulpera, Switzerland, 24–28 February 2003; International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. p. 34. [Google Scholar]
- Sahebdivani, S.; Arefi, H.; Maboudi, M. Rail track detection and projection-based 3D modeling from UAV point cloud. Sensors 2020, 20, 5220. [Google Scholar] [CrossRef]
- Wang, X.; Mizukami, Y.; Tada, M.; Matsuno, F. Navigation of a mobile robot in a dynamic environment using a point cloud map. Artif. Life Robot. 2021, 26, 10–20. [Google Scholar] [CrossRef]
- Rosas-Cervantes, V.; Lee, S.G. 3D localization of a mobile robot by using Monte Carlo algorithm and 2D features of 3D point cloud. Int. J. Control Autom. Syst. 2020, 18, 2955–2965. [Google Scholar] [CrossRef]
- Perez-Grau, F.J.; Caballero, F.; Viguria, A.; Ollero, A. Multi-sensor three-dimensional Monte Carlo localization for long-term aerial robot navigation. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417732757. [Google Scholar] [CrossRef]
- Alhamzi, K.; Elmogy, M.; Barakat, S. 3D object recognition based on local and global features using point cloud library. Int. J. Adv. Comput. Technol. 2015, 7, 43. [Google Scholar]
- Pratama, A.R.P.; Dewantara, B.S.B.; Sari, D.M.; Pramadihanto, D. Density-based Clustering for 3D Stacked Pipe Object Recognition using Directly-given Point Cloud Data on Convolutional Neural Network. EMITTER Int. J. Eng. Technol. 2022, 10, 153–169. [Google Scholar]
- Bai, X.; Hu, Z.; Zhu, X.; Huang, Q.; Chen, Y.; Fu, H.; Tai, C. Transfusion: Robust lidar-camera fusion for 3D object detection with transformers. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 21–24 June 2022; pp. 1090–1099. [Google Scholar]
- Mineo, C.; Pierce, S.G.; Summan, R. Novel algorithms for 3D surface point cloud boundary detection and edge reconstruction. J. Comput. Des. Eng. 2019, 6, 81–91. [Google Scholar] [CrossRef]
- Sun, T.; Liu, G.; Li, R.; Liu, S.; Zhu, S.; Zeng, B. Quadratic terms based point-to-surface 3D representation for deep learning of point cloud. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 2705–2718. [Google Scholar] [CrossRef]
- Zhou, Y.; Han, D.; Hu, K.; Qin, G.; Xiang, Z.; Ying, C.; Zhao, L.; Hu, X. Accurate virtual trial assembly method of prefabricated steel components using terrestrial laser scanning. Adv. Civ. Eng. 2021, 2021, 9916859. [Google Scholar] [CrossRef]
- Zhao, L.; Ma, X.; Xiang, Z.; Zhang, S.; Hu, C.; Zhou, Y.; Chen, G. Landslide Deformation Extraction from Terrestrial Laser Scanning Data with Weighted Least Squares Regularization Iteration Solution. Remote Sens. 2022, 14, 2897. [Google Scholar] [CrossRef]
- Sharp, G.C.; Lee, S.W.; Wehe, D.K. ICP registration using invariant features. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 90–102. [Google Scholar] [CrossRef]
- Maken, F.A.; Ramos, F.; Ott, L. Stein ICP for Uncertainty Estimation in Point Cloud Matching. IEEE Robot. Autom. Lett. 2021, 7, 1063–1070. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of laser scanning point clouds: A review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Zhang, J.; Wu, Q.; Fan, L. A coarse-to-fine algorithm for matching and registration in 3D cross-source point clouds. IEEE Trans. Circuits Syst. Video Technol. 2017, 28, 2965–2977. [Google Scholar] [CrossRef]
- Yu, H.; Li, F.; Saleh, M.; Busam, B.; Ilic, S. Cofinet: Reliable coarse-to-fine correspondences for robust pointcloud registration. Adv. Neural Inf. Process. Syst. 2021, 34, 23872–23884. [Google Scholar]
- Xie, Z.; Xu, S.; Li, X. A high-accuracy method for fine registration of overlapping point clouds. Image Vis. Comput. 2010, 28, 563–570. [Google Scholar] [CrossRef]
- Jaw, J.; Chuang, T. Feature-based registration of terrestrial lidar point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 2. [Google Scholar]
- Xia, T.; Yang, J.; Chen, L. Automated semantic segmentation of bridge point cloud based on local descriptor and machine learning. Autom. Constr. 2022, 133, 103992. [Google Scholar] [CrossRef]
- Belongie, S.; Malik, J.; Puzicha, J. Shape matching and object recognition using shape contexts. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 509–522. [Google Scholar] [CrossRef]
- Makadia, A.; Patterson, A.; Daniilidis, K. Fully automatic registration of 3D point clouds. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1, pp. 1297–1304. [Google Scholar]
- Dold, C. Extended Gaussian images for the registration of terrestrial scan data. In Proceedings of the ISPRS Workshop Laser Scanning, Enschede, The Netherlands, 12–14 September 2005; pp. 180–185. [Google Scholar]
- Poiesi, F.; Boscaini, D. Generalisable and distinctive 3D local deep descriptors for point cloud registration. arXiv 2022, arXiv:2105.10382. [Google Scholar]
- Bai, X.; Luo, Z.; Zhou, L.; Fu, H.; Quan, L.; Tai, C. D3feat: Joint learning of dense detection and description of 3D local features. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 6359–6367. [Google Scholar]
- Petricek, T.; Svoboda, T. Point cloud registration from local feature correspondences—Evaluation on challenging datasets. PLoS ONE 2017, 12, e0187943. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Mei, G.; Zhang, J.; Abbas, R. A comprehensive survey on point cloud registration. arXiv 2021, arXiv:2103.02690. [Google Scholar]
- Kiforenko, L.; Drost, B.; Tombari, F.; Krüger, N.; Buch, A.G. A performance evaluation of point pair features. Comput. Vis. Image Underst. 2018, 166, 66–80. [Google Scholar] [CrossRef]
- Johnson, A.E.; Hebert, M. Using spin images for efficient object recognition in cluttered 3D scenes. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 433–449. [Google Scholar] [CrossRef]
- Buch, A.G.; Kraft, D.; Robotics, S. Local Point Pair Feature Histogram for Accurate 3D Matching. In Proceedings of the BMVC, Newcastle, UK, 3–6 September 2018; p. 143. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Tombari, F.; Salti, S.; Stefano, L.D. Unique signatures of histograms for local surface description. In Proceedings of the European Conference on Computer Vision, Heraklion, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 356–369. [Google Scholar]
- Salti, S.; Tombari, F.; Stefano, L.D. SHOT: Unique signatures of histograms for surface and texture description. Comput. Vis. Image Underst. 2014, 125, 251–264. [Google Scholar] [CrossRef]
- Guo, Y.; Sohel, F.; Bennamoun, M.; Lu, M.; Wan, J. Rotational projection statistics for 3D local surface description and object recognition. Int. J. Comput. Vis. 2013, 105, 63–86. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Zhang, Q.; Xiao, Y.; Cao, Z. TOLDI: An effective and robust approach for 3D local shape description. Pattern Recognit. 2017, 65, 175–187. [Google Scholar] [CrossRef]
- Bai, X.; Luo, Z.; Zhou, L.; Chen, H.; Li, L.; Hu, Z.; Fu, H.; Tai, C. Pointdsc: Robust point cloud registration using deep spatial consistency. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 15859–15869. [Google Scholar]
- Vosselman, G.; Gorte, B.G.H.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Pauly, M.; Gross, M.; Kobbelt, L.P. Efficient simplification of point-sampled surfaces. In Proceedings of the IEEE Visualization 2002, VIS 2002, Boston, MA, USA, 27 October–1 November 2002; pp. 163–170. [Google Scholar]
- Dong, Z.; Yang, B.; Liu, Y.; Liang, F.; Li, B.; Zang, Y. A novel binary shape context for 3D local surface description. ISPRS J. Photogramm. Remote Sens. 2017, 130, 431–452. [Google Scholar] [CrossRef]
- Rusu, R.B.; Blodow, N.; Marton, Z.C.; Beetz, M. Aligning point cloud views using persistent feature histograms. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3384–3391. [Google Scholar]
- Deakin, R.E. A Note on the Bursa-Wolf and Molodensky-Badekas Transformations; School of Mathematical and Geospatial Sciences, RMIT University: Melbourne, VIC, Australia, 2006; pp. 1–21. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Yang, J.; Cao, Z.; Zhang, Q. A fast and robust local descriptor for 3D point cloud registration. Inf. Sci. 2016, 346, 163–179. [Google Scholar] [CrossRef]
- The Standford 3D Scanning Repository. Available online: http://www-graphics.stanford.edu/data/3Dscanrep/ (accessed on 29 June 2022).
- Available online: http://vision.deis.unibo.it/research/80-shot (accessed on 19 August 2022).
- Leica ScanStation P50—Long Range 3D Terrestrial Laser Scanner. Available online: https://leica-geosystems.com/products/laser-scanners/scanners/leica-scanstation-p50 (accessed on 29 June 2022).
- Deschaud, J.E.; Goulette, F. Point cloud non local denoising using local surface descriptor similarity. IAPRS 2010, 38, 109–114. [Google Scholar]
- Liu, L.; Xiao, J.; Wang, Y.; Lu, Z.; Wang, Y. A novel rock-mass point cloud registration method based on feature line extraction and feature point matching. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5701117. [Google Scholar] [CrossRef]
- Prakhya, S.M.; Lin, J.; Chandrasekhar, V.; Lin, W.; Liu, B. 3DHoPD: A fast low-dimensional 3-D descriptor. IEEE Robot. Autom. Lett. 2017, 2, 1472–1479. [Google Scholar] [CrossRef]
- Lei, H.; Jiang, G.; Quan, L. Fast descriptors and correspondence propagation for robust global point cloud registration. IEEE Trans. Image Process. 2017, 26, 3614–3623. [Google Scholar] [CrossRef]
- Dong, T.; Zhao, Y.; Zhang, Q.; Xue, B.; Li, J.; Li, W. Multi-scale point cloud registration based on topological structure. Concurr. Comput. Pract. Exp. 2022, e6873. [Google Scholar] [CrossRef]
- Lu, J.; Wang, Z.; Hua, B.; Chen, K. Automatic point cloud registration algorithm based on the feature histogram of local surface. PLoS ONE 2020, 15, e0238802. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.; Hou, X.; Pang, S.; Chen, J. ICP registration with DCA descriptor for 3D point clouds. Opt. Express 2021, 29, 20423–20439. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Scan range mode | 0.4~120 m, 0.4~270 m, 0.4~570 m, >1 km |
| Scan Rate | Maximum 1,000,000 points/s |
| Vertical/horizontal field-of-view | 360°/290° |
| Range noise * | 0.4 mm @ 10 m 0.5 mm @ 50 m |
| Dual-axis compensator | 1.5″ |
| Dataset | Method | Rotation Error (°) | Translation Error (m) | ||||
|---|---|---|---|---|---|---|---|
| x | y | z | x | y | z | ||
| Bunny | FPFH | 0.027 | −0.018 | 0.034 | −0.0032 | 0.0039 | 0.0028 |
| SHOT | 0.021 | −0.019 | 0.028 | −0.0034 | 0.0025 | 0.0020 | |
| RoPS | 0.028 | −0.017 | 0.023 | −0.0029 | 0.0026 | 0.0024 | |
| Our method | 0.019 | −0.013 | 0.021 | −0.0019 | 0.0021 | 0.0017 | |
| Dragon | FPFH | −0.031 | 0.028 | −0.043 | 0.0038 | 0.0026 | −0.0036 |
| SHOT | −0.028 | 0.019 | −0.036 | 0.0041 | 0.0024 | −0.0029 | |
| RoPS | −0.029 | 0.022 | −0.038 | 0.0034 | 0.0025 | −0.0031 | |
| Our method | −0.023 | 0.014 | −0.021 | 0.0032 | 0.0018 | −0.0029 | |
| Horse | FPFH | −0.026 | −0.025 | 0.023 | 0.0021 | −0.0033 | −0.0031 |
| SHOT | −0.023 | −0.026 | 0.031 | 0.0025 | −0.0036 | −0.0029 | |
| RoPS | −0.024 | −0.023 | 0.027 | 0.0023 | −0.0028 | −0.0026 | |
| Our method | −0.014 | −0.016 | 0.017 | 0.0018 | −0.0029 | −0.0024 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Xiang, Z.; Chen, M.; Ma, X.; Zhou, Y.; Zhang, S.; Hu, C.; Hu, K. Establishment and Extension of a Fast Descriptor for Point Cloud Registration. Remote Sens. 2022, 14, 4346. https://doi.org/10.3390/rs14174346
Zhao L, Xiang Z, Chen M, Ma X, Zhou Y, Zhang S, Hu C, Hu K. Establishment and Extension of a Fast Descriptor for Point Cloud Registration. Remote Sensing. 2022; 14(17):4346. https://doi.org/10.3390/rs14174346
Chicago/Turabian StyleZhao, Lidu, Zhongfu Xiang, Maolin Chen, Xiaping Ma, Yin Zhou, Shuangcheng Zhang, Chuan Hu, and Kaixin Hu. 2022. "Establishment and Extension of a Fast Descriptor for Point Cloud Registration" Remote Sensing 14, no. 17: 4346. https://doi.org/10.3390/rs14174346