
End-to-End Neural Interpolation of Satellite-Derived Sea Surface Suspended Sediment Concentrations




Abstract
:1. Introduction
2. Data
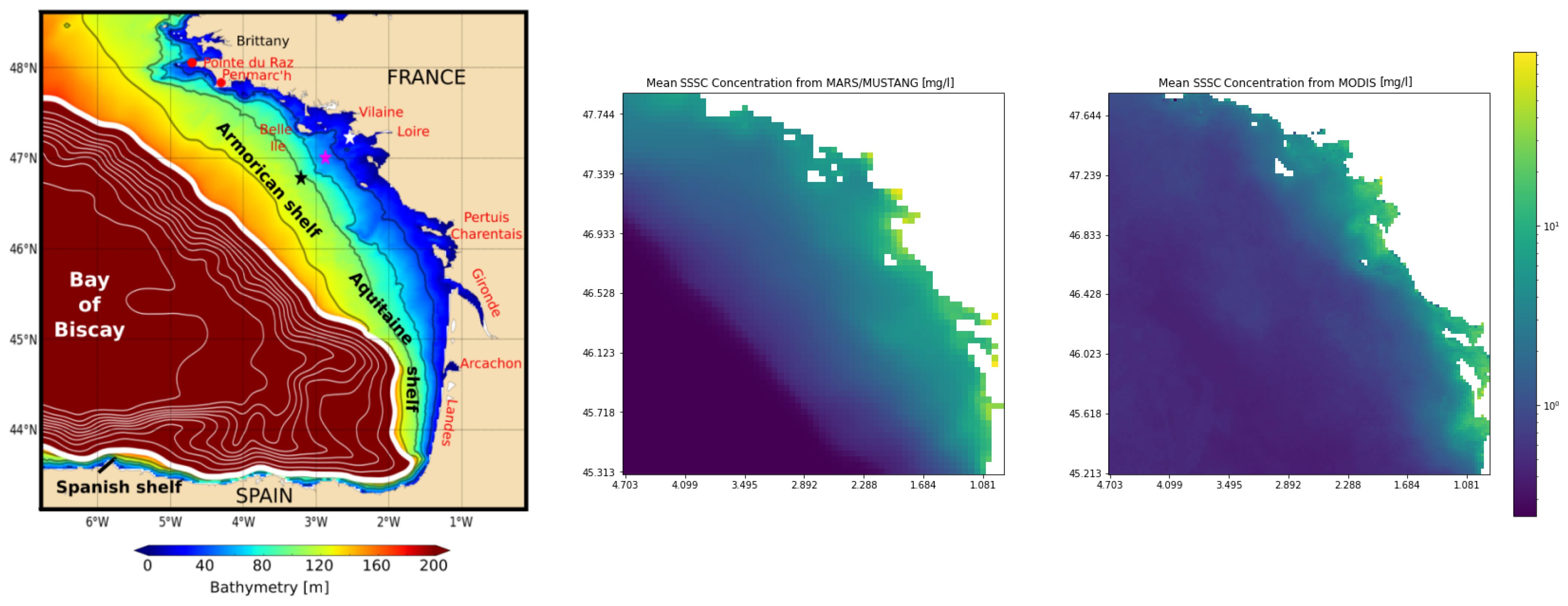
2.1. Area of Interest
2.2. MARS Model Simulations (for OSSE)
2.3. MODIS Real Satellite Data (for OSE)
3. Methods
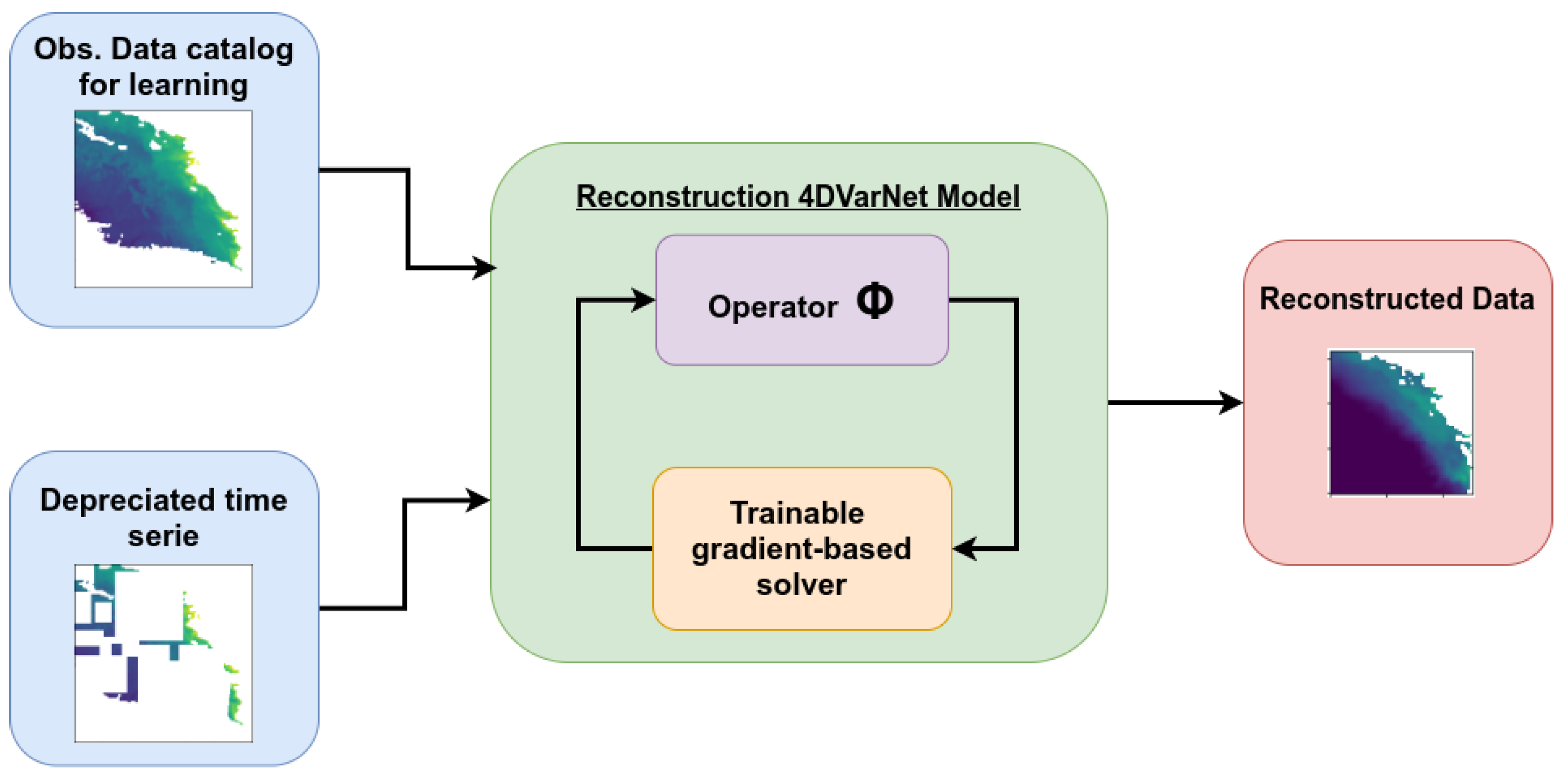
3.1. 4DVarNet Scheme
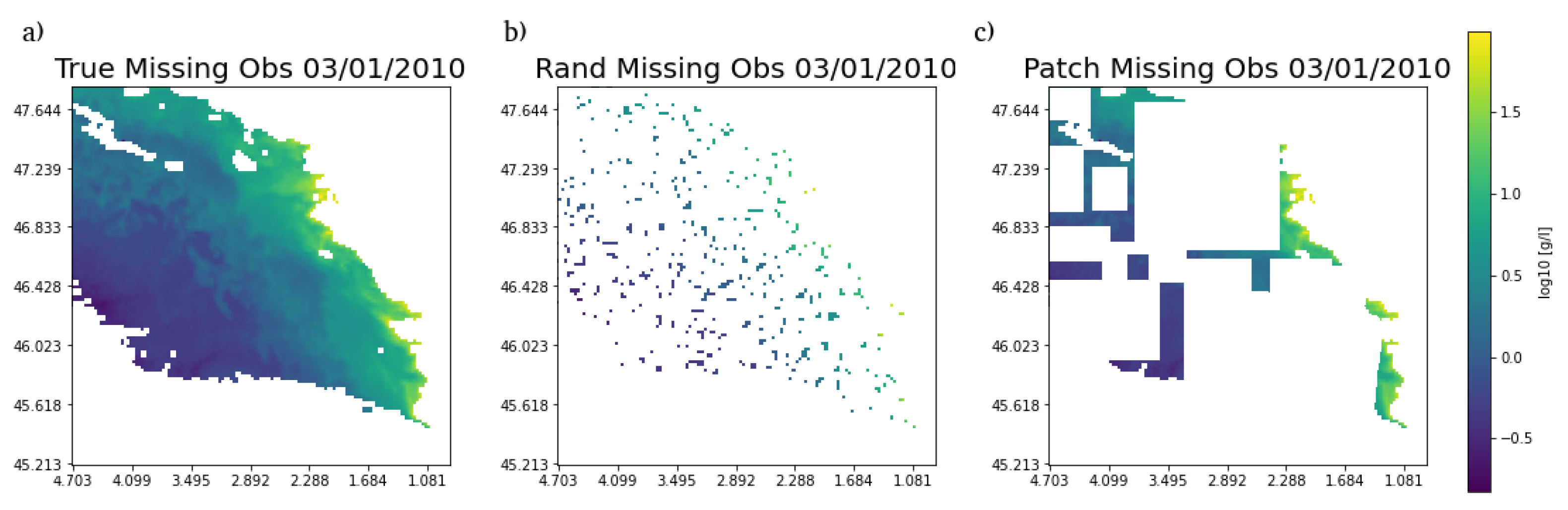
3.2. Training and Evaluation Framework
3.3. Performance Metrics
- First, the statistical distribution of particle concentrations typically follows a lognormal probability distribution [37] so that values follow a Gaussian distribution. Then, providing bias is negligible (all biases in all experiments were found equal or inferior to 0.01 in absolute values), the RMSE is comparable to a standard deviation and then completely characterizes the statistical distribution;
- Second, the evaluation on of concentrations emphasizes the validation of low concentrations, which are important in the determination of water transparency, which is a main goal in our studies.
3.4. Reference Methods for Comparison
4. Results
4.1. Global Performance
4.2. OSSE versus OSE Comparison
4.3. 4DVarNet Performance
5. Discussion
5.1. From OSSE to OSE
5.2. Comparison of Interpolation Methods
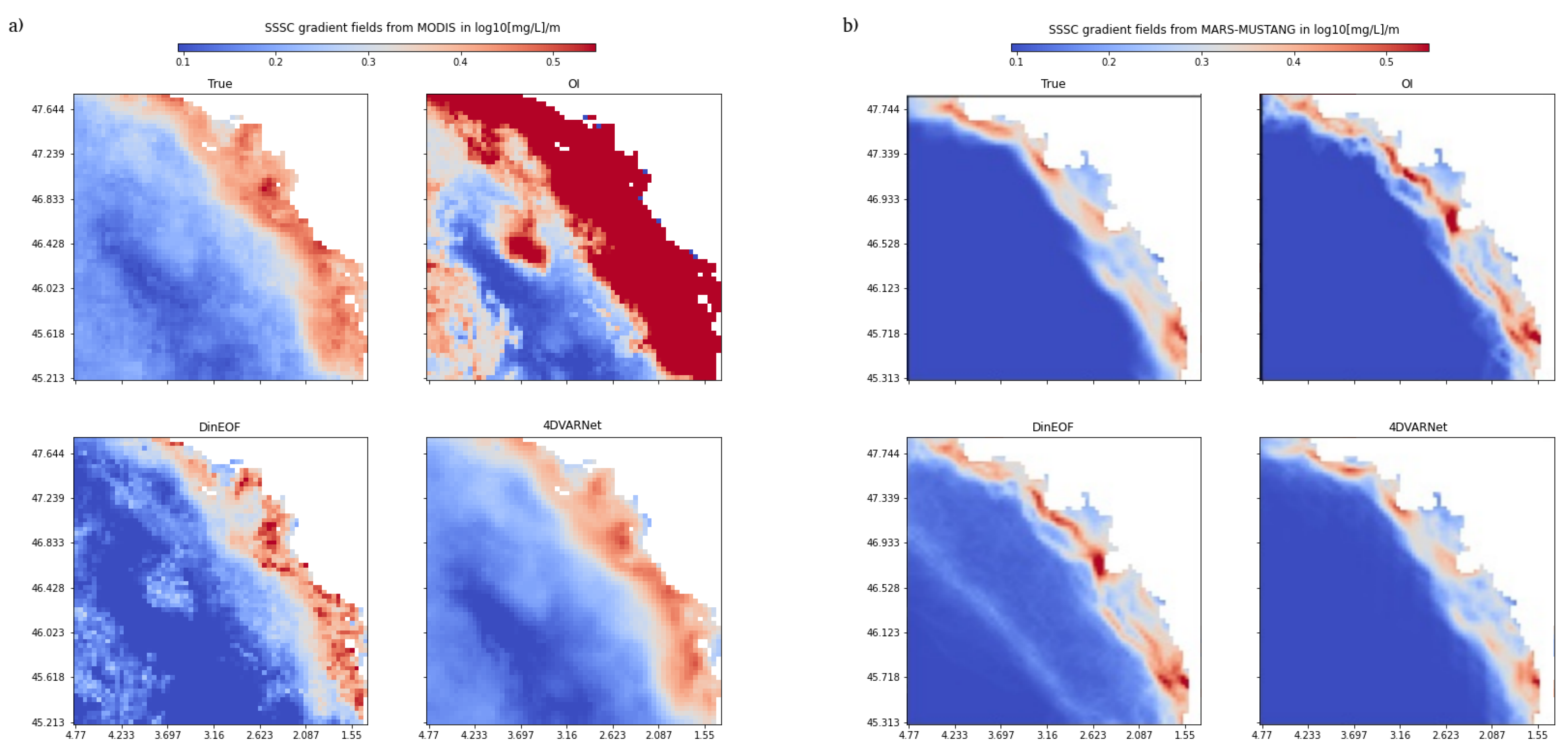
5.3. Retrieval of Fine-Scale Turbidity Patterns from Satellite Data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ARPEGE | Action de Recherche Petite Echelle Grande Echelle |
| BoB | Bay of Biscay |
| CMEMS | Copernicus Marine Environment Monitoring Service |
| DINEOF | Data INterpolating Empirical Orthogonal function |
| EOF | Empirical Orthogonal function |
| HIGHROC | HIGH spatial and temporal Resolution Ocean color products and services |
| IBI | Iberian-Biscay-Ireland |
| LSTM | Long Short Term Memory |
| MARS | Model for Applications at Regional Scales |
| MODIS | Moderate-Resolution Imaging Spectroradiometer |
| MUSTANG | MUd and Sand TrAnsport modelliNG |
| NAP | Non-Algal Particles |
| NN | Neural Network |
| NTU | Nephelometric Turbidity Unit |
| OI | Optimal Interpolation |
| OLCI | Ocean and Land color Instrument |
| OSE | Observing System Experiment (real data) |
| OSSE | Observing System Simulation Experiment (simulated data) |
| RMSE | Root Mean Square Error |
| RMSLE | Root Mean Square Logarithm Error |
| SPIM | Suspended Particulate Inorganic Matter |
| SSSC | (sea) Surface Suspended Sediment Concentration |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
| 4DVar | Four-Dimensional Variational data assimilation (model-driven) |
| 4DVarNet | Four-Dimensional Variational (neural) Network data assimilation (data-driven) |
References
- Owens, P.N. Soil erosion and sediment dynamics in the Anthropocene: A review of human impacts during a period of rapid global environmental change. J. Soils Sediments 2020, 20, 4115–4143. [Google Scholar] [CrossRef]
- Irabien, M.J.; Cearreta, A.; Gómez-Arozamena, J.; Gardoki, J.; Martín-Consuegra, A.F. Recent coastal anthropogenic impact recorded in the Basque mud patch (southern Bay of Biscay shelf). Quat. Int. 2020, 566–567, 357–367. [Google Scholar] [CrossRef]
- Borja, Á.; Elliott, M.; Carstensen, J.; Heiskanen, A.S.; van de Bund, W. Marine management - Towards an integrated implementation of the European marine strategy framework and the water framework directives. Mar. Pollut. Bull. 2010, 60, 2175–2186. [Google Scholar] [CrossRef]
- Elliott, M.; Borja, Á.; McQuatters-Gollop, A.; Mazik, K.; Birchenough, S.; Andersen, J.H.; Painting, S.; Peck, M. Force majeure: Will climate change affect our ability to attain Good Environmental Status for marine biodiversity? Mar. Pollut. Bull. 2015, 95, 7–27. [Google Scholar] [CrossRef] [PubMed]
- Larcombe, P.; Morrison-Saunders, A. Managing marine environments and decision-making requires better application of the physical sedimentary sciences. Australas. J. Environ. Manag. 2017, 24, 200–221. [Google Scholar] [CrossRef]
- Tecchiato, S.; Collins, L.; Parnum, I.; Stevens, A. The influence of geomorphology and sedimentary processes on benthic habitat distribution and littoral sediment dynamics: Geraldton, Western Australia. Mar. Geol. 2015, 359, 148–162. [Google Scholar] [CrossRef]
- James, I.D. Modelling pollution dispersion, the ecosystem and water quality in coastal waters: A review. Environ. Model. Softw. 2002, 17, 363–385. [Google Scholar] [CrossRef]
- Mitchell, C.; Cunningham, A. Remote sensing of spatio-temporal relationships between the partitioned absorption coefficients of phytoplankton cells and mineral particles and euphotic zone depths in a partially mixed shelf sea. Remote Sens. Environ. 2015, 160, 193–205. [Google Scholar] [CrossRef]
- Saulnier, J.B.; Escobar-Valencia, E.; Grognet, M.; Waeles, B. 3D Modelling for the Dispersion of Sediments Dredged in the Port of La Rochelle with Open TELEMAC-MASCARET. In Proceedings of the Papers Submitted to the 2020 TELEMAC-MASCARET User Conference, Antwerp, Belgium, 14–15 October 2021; pp. 129–137. [Google Scholar]
- Diaz, M.; Grasso, F.; Le Hir, P.; Sottolichio, A.; Caillaud, M.; Thouvenin, B. Modeling Mud and Sand Transfers Between a Macrotidal Estuary and the Continental Shelf: Influence of the Sediment Transport Parameterization. J. Geophys. Res. Ocean. 2020, 125, 1–37. [Google Scholar] [CrossRef]
- Le Hir, P.; Monbet, Y.; Orvain, F. Sediment erodability in sediment transport modelling: Can we account for biota effects? Cont. Shelf Res. 2007, 27, 1116–1142. [Google Scholar] [CrossRef]
- Wang, Y.P.; Voulgaris, G.; Li, Y.; Yang, Y.; Gao, J.; Chen, J.; Gao, S. Sediment resuspension, flocculation, and settling in a macrotidal estuary. J. Geophys. Res. Ocean. 2013, 118, 5591–5608. [Google Scholar] [CrossRef]
- Renosh, P.R.; Jourdin, F.; Charantonis, A.A.; Yala, K.; Rivier, A.; Badran, F.; Thiria, S.; Guillou, N.; Leckler, F.; Gohin, F.; et al. Construction of multi-year time-series profiles of suspended particulate inorganic matter concentrations using machine learning approach. Remote Sens. 2017, 9, 1320. [Google Scholar] [CrossRef]
- Moore, A.M.; Martin, M.J.; Akella, S.; Arango, H.G.; Balmaseda, M.; Bertino, L.; Ciavatta, S.; Cornuelle, B.; Cummings, J.; Frolov, S.; et al. Synthesis of ocean observations using data assimilation for operational, real-time and reanalysis systems: A more complete picture of the state of the ocean. Front. Mar. Sci. 2019, 6, 90. [Google Scholar] [CrossRef]
- Nazeer, M.; Bilal, M.; Alsahli, M.; Shahzad, M.; Waqas, A. Evaluation of Empirical and Machine Learning Algorithms for Estimation of Coastal Water Quality Parameters. ISPRS Int. J. Geo-Inf. 2017, 6, 360. [Google Scholar] [CrossRef]
- Jin, D.; Lee, E.; Kwon, K.; Kim, T. A Deep Learning Model Using Satellite Ocean Color and Hydrodynamic Model to Estimate Chlorophyll- a Concentration. Remote Sens. 2021, 13, 2003. [Google Scholar] [CrossRef]
- Barth, A.; Alvera-Azcárate, A.; Troupin, C.; Beckers, J.M. DINCAE 2.0: A convolutional neural network with error estimates to reconstruct sea surface temperature satellite observations. Geosci. Model Dev. 2022, 15, 2183–2196. [Google Scholar] [CrossRef]
- Fablet, R.; Beauchamp, M.; Drumetz, L.; Rousseau, F. Joint Interpolation and Representation Learning for Irregularly Sampled. Front. Appl. Math. Stat. 2021, 7, 655224. [Google Scholar] [CrossRef]
- Vient, J.M.; Jourdin, F.; Fablet, R.; Mengual, B.; Lafosse, L.; Delacourt, C. Data-driven interpolation of sea surface suspended concentrations derived from ocean color remote sensing data. Remote Sens. 2021, 13, 3537. [Google Scholar] [CrossRef]
- Mengual, B.; Hir, P.L.; Cayocca, F.; Garlan, T. Modelling fine sediment dynamics: Towards a common erosion law for fine sand, mud and mixtures. Water 2017, 9, 564. [Google Scholar] [CrossRef]
- Mengual, B.; Le Hir, P.; Cayocca, F.; Garlan, T. Bottom trawling contribution to the spatio-temporal variability of sediment fluxes on the continental shelf of the Bay of Biscay (France). Mar. Geol. 2019, 414, 77–91. [Google Scholar] [CrossRef]
- Huthnance, J.; Hopkins, J.; Berx, B.; Dale, A.; Holt, J.; Hosegood, P.; Inall, M.; Jones, S.; Loveday, B.R.; Miller, P.I.; et al. Ocean shelf exchange, NW European shelf seas: Measurements, estimates and comparisons. Prog. Oceanogr. 2022, 202, 102760. [Google Scholar] [CrossRef]
- Castaing, P.; Froidefond, J.M.; Lazure, P.; Weber, O.; Prud’Homme, R.; Jouanneau, J.M. Relationship between hydrology and seasonal distribution of suspended sediments on the continental shelf of the Bay of Biscay. Deep-Sea Res. Part II Top. Stud. Oceanogr. 1999, 46, 1979–2001. [Google Scholar] [CrossRef]
- Gohin, F.; Loyer, S.; Lunven, M.; Labry, C.; Froidefond, J.M.; Delmas, D.; Huret, M.; Herbland, A. Satellite-derived parameters for biological modelling in coastal waters: Illustration over the eastern continental shelf of the Bay of Biscay. Remote Sens. Environ. 2005, 95, 29–46. [Google Scholar] [CrossRef]
- Gohin, F.; Saulquin, B.; Oger-Jeanneret, H.; Lozac’h, L.; Lampert, L.; Lefebvre, A.; Riou, P.; Bruchon, F. Towards a better assessment of the ecological status of coastal waters using satellite-derived chlorophyll-a concentrations. Remote Sens. Environ. 2008, 112, 3329–3340. [Google Scholar] [CrossRef]
- Petus, C.; Chust, G.; Gohin, F.; Doxaran, D.; Froidefond, J.M.; Sagarminaga, Y. Estimating turbidity and total suspended matter in the Adour River plume (South Bay of Biscay) using MODIS 250-m imagery. Cont. Shelf Res. 2010, 30, 379–392. [Google Scholar] [CrossRef]
- Gohin, F.; Saulquin, B.; Bryere, P. Atlas de la Température, de la Concentration en Chlorophylle et de la Turbidité de Surface du Plateau Continental Français et de ses Abords de L’Ouest Européen. 2010, p. 53. Available online: https://archimer.ifremer.fr/doc/00057/16840/14306.pdf (accessed on 12 July 2022).
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]
- Gohin, F.; Bryère, P.; Lefebvre, A.; Sauriau, P.G.; Savoye, N.; Vantrepotte, V.; Bozec, Y.; Cariou, T.; Conan, P.; Coudray, S.; et al. Satellite and in situ monitoring of chl-a, turbidity, and total suspended matter in coastal waters: Experience of the year 2017 along the french coasts. J. Mar. Sci. Eng. 2020, 8, 665. [Google Scholar] [CrossRef]
- Bellacicco, M.; Cornec, M.; Organelli, E.; Brewin, R.J.; Neukermans, G.; Volpe, G.; Barbieux, M.; Poteau, A.; Schmechtig, C.; D’Ortenzio, F.; et al. Global Variability of Optical Backscattering by Non-algal particles From a Biogeochemical-Argo Data Set. Geophys. Res. Lett. 2019, 46, 9767–9776. [Google Scholar] [CrossRef]
- Borja, A.; Amouroux, D.; Anschutz, P.; Gómez-Gesteira, M.; Uyarra, M.C.; Valdés, L. The Bay of Biscay, 2nd ed.; Elsevier Ltd.: Amsterdam, The Netherlands, 2018; pp. 113–152. [Google Scholar] [CrossRef]
- Fablet, R.; Drumetz, L.; Rousseau, F.; Fablet, R.; Drumetz, L.; End-to end, F.R. End-to-End Learning of Variational Models and Solvers for the Resolution of Interpolation Problems. 2021. Available online: https://hal-imt-atlantique.archives-ouvertes.fr/hal-03139133/document (accessed on 12 July 2022).
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Beauchamp, M.; Fablet, R.; Ubelmann, C.; Ballarotta, M.; Chapron, B. Intercomparison of data-driven and learning-based interpolations of along-track nadir and wide-swath swot altimetry observations. Remote Sens. 2020, 12, 3806. [Google Scholar] [CrossRef]
- Fablet, R.; Chapron, B.; Drumetz, L.; Memin, E.; Pannekoucke, O.; Rousseau, F. Learning Variational Data Assimilation Models and Solvers. arXiv 2020, arXiv:2007.12941. [Google Scholar] [CrossRef]
- Gao, Y.; Guan, J.; Zhang, F.; Wang, X.; Long, Z. Attention-Unet-Based Near-Real-Time Precipitation Estimation from Fengyun-4A Satellite Imageries. Remote Sens. 2022, 14, 2925. [Google Scholar] [CrossRef]
- Eleveld, M.A.; Pasterkamp, R.; van der Woerd, H.J.; Pietrzak, J.D. Remotely sensed seasonality in the spatial distribution of sea-surface suspended particulate matter in the southern North Sea. Estuar. Coast. Shelf Sci. 2008, 80, 103–113. [Google Scholar] [CrossRef]
- Daley, R. Atmospheric data Assimilation. J. Meterolog. Soc. Jpn. 1997, 75, 319–329. [Google Scholar] [CrossRef]
- Cressie, N.A.C.; Wikle, C.K. Statistics for Spatio-Temporal Data; Wiley: Hoboken, NJ, USA, 2011; p. 588. [Google Scholar]
- Beckers, J.M.; Rixen, M. EOF calculations and data filling from incomplete oceanographic datasets. J. Atmos. Ocean. Technol. 2003, 20, 1839–1856. [Google Scholar] [CrossRef]
- OLIVER, M.A.; WEBSTER, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 2007, 4, 313–332. [Google Scholar] [CrossRef]
- Alvera-Azcárate, A.; Vanhellemont, Q.; Ruddick, K.; Barth, A.; Beckers, J.M. Analysis of high frequency geostationary ocean color data using DINEOF. Estuar. Coast. Shelf Sci. 2015, 159, 28–36. [Google Scholar] [CrossRef]
- Liu, X.; Wang, M. Analysis of ocean diurnal variations from the Korean Geostationary Ocean Color Imager measurements using the DINEOF method. Estuar. Coast. Shelf Sci. 2016, 180, 230–241. [Google Scholar] [CrossRef]
- Fablet, R.; Febvre, Q.; Chapron, B. Multimodal 4DVarNets for the reconstruction of sea surface dynamics from SST-SSH synergies. arXiv 2022, arXiv:2207.01372. [Google Scholar]
- Guo, X.; Liu, X.; Zhu, E.; Yin, J. Deep Clustering with Convolutional Autoencoders. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), Proceedings of the 24th International Conference, ICONIP 2017, Guangzhou, China, 14–18 November 2017; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Hoffman, R.N.; Atlas, R. Future observing system simulation experiments. Bull. Am. Meteorol. Soc. 2016, 97, 1601–1616. [Google Scholar] [CrossRef]
- Perrot, L.; Gohin, F.; Ruiz-Pino, D.; Lampert, L.; Huret, M.; Dessier, A.; Malestroit, P.; Dupuy, C.; Bourriau, P. Coccolith-derived turbidity and hydrological conditions in May in the Bay of Biscay. Prog. Oceanogr. 2018, 166, 41–53. [Google Scholar] [CrossRef]
- Saulquin, B.; Gohin, F.; Fanton d’Andon, O. Interpolated fields of satellite-derived multi-algorithm chlorophyll-a estimates at global and European scales in the frame of the European Copernicus-Marine Environment Monitoring Service. J. Oper. Oceanogr. 2019, 12, 47–57. [Google Scholar] [CrossRef]
- Barth, A.; Alvera-Azcárate, A.; Licer, M.; Beckers, J.M. DINCAE 1.0: A convolutional neural network with error estimates to reconstruct sea surface temperature satellite observations. Geosci. Model Dev. 2020, 13, 1609–1622. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Dataset | Sub-Sampling | OI | DINEOF | 4DVarNet |
|---|---|---|---|---|---|
| OSE | MODIS | Random | 60.5 | 76.4 | 89.5 |
| OSE | MODIS | Patch | 56.5 | 73.8 | 87.3 |
| OSSE | MARS | - | 90.4 | 91.3 | 96.6 |
| Experiment | Dataset | Sub-Sampling | OI | DINEOF | 4DVarNet |
|---|---|---|---|---|---|
| OSE | MODIS | Random | 0.304 | 0.237 | 0.156 |
| OSE | MODIS | Patch | 0.346 | 0.253 | 0.168 |
| OSSE | MARS | - | 0.176 | 0.167 | 0.104 |
| Sub-Sampling | OI | DINEOF | 4DVarNet |
|---|---|---|---|
| Random | −73% | −42% | −50% |
| Patch | −97% | −51% | −62% |
| Experiment | Dataset | Sub-Sampling | OI | DINEOF |
|---|---|---|---|---|
| OSE | MODIS | Random | 49% | 34% |
| OSE | MODIS | Patch | 51% | 34% |
| OSSE | MARS | - | 41% | 38% |
| Experiment | Dataset | Sub-Sampling | OI | DINEOF | 4DVarNet |
|---|---|---|---|---|---|
| OSE | MODIS | Random | 58.3 | 72.5 | 88.9 |
| OSE | MODIS | Patch | 56.6 | 67.4 | 91.2 |
| OSSE | MARS | - | 16.0 | 40.6 | 63.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vient, J.-M.; Fablet, R.; Jourdin, F.; Delacourt, C. End-to-End Neural Interpolation of Satellite-Derived Sea Surface Suspended Sediment Concentrations. Remote Sens. 2022, 14, 4024. https://doi.org/10.3390/rs14164024
Vient J-M, Fablet R, Jourdin F, Delacourt C. End-to-End Neural Interpolation of Satellite-Derived Sea Surface Suspended Sediment Concentrations. Remote Sensing. 2022; 14(16):4024. https://doi.org/10.3390/rs14164024
Chicago/Turabian StyleVient, Jean-Marie, Ronan Fablet, Frédéric Jourdin, and Christophe Delacourt. 2022. "End-to-End Neural Interpolation of Satellite-Derived Sea Surface Suspended Sediment Concentrations" Remote Sensing 14, no. 16: 4024. https://doi.org/10.3390/rs14164024