
A Controllable Suppression Jamming Method against SAR Based on Active Radar Transponder

Abstract
:1. Introduction
2. Jamming Realization Principles Based on Active Radar Transponder
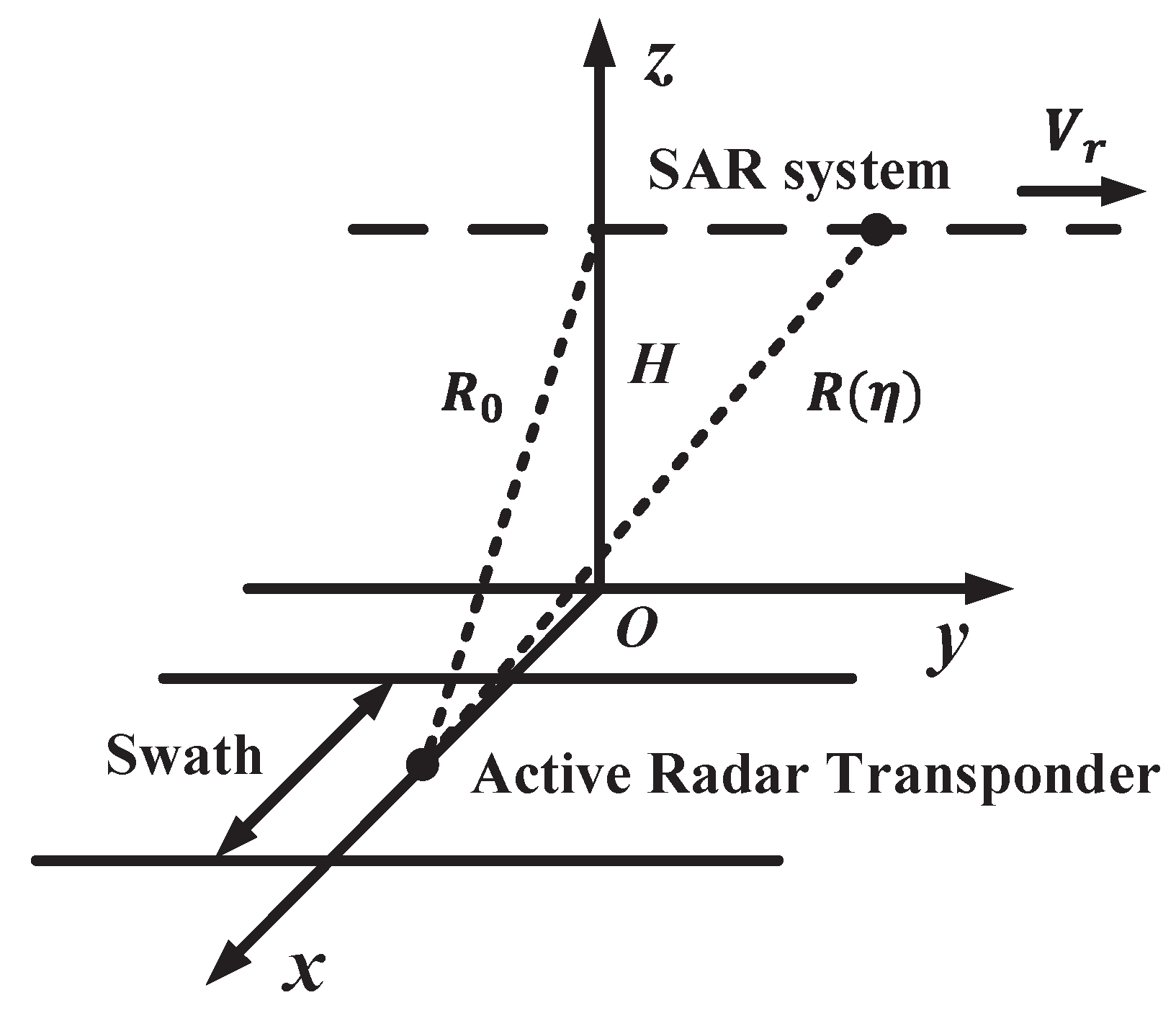
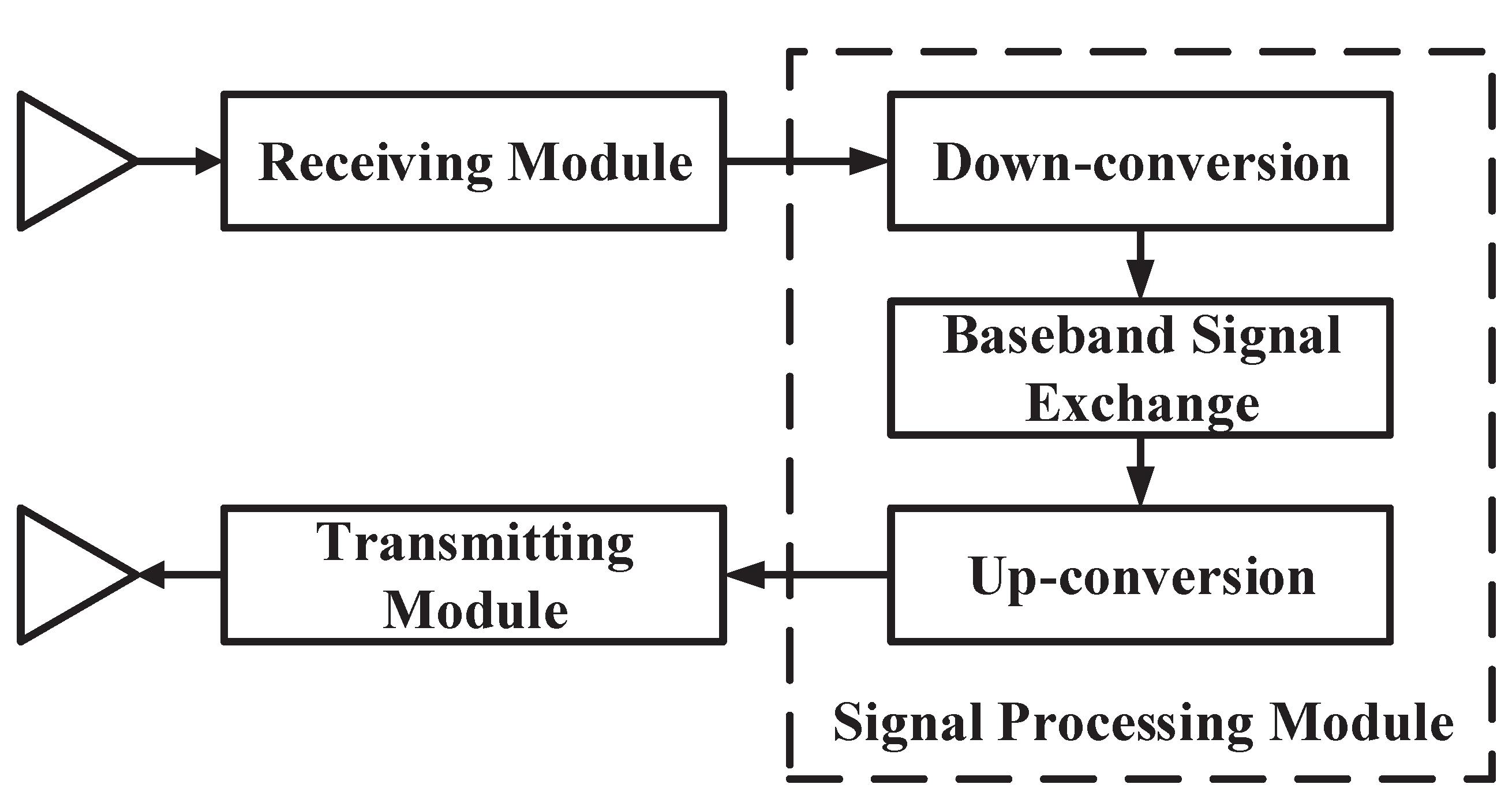
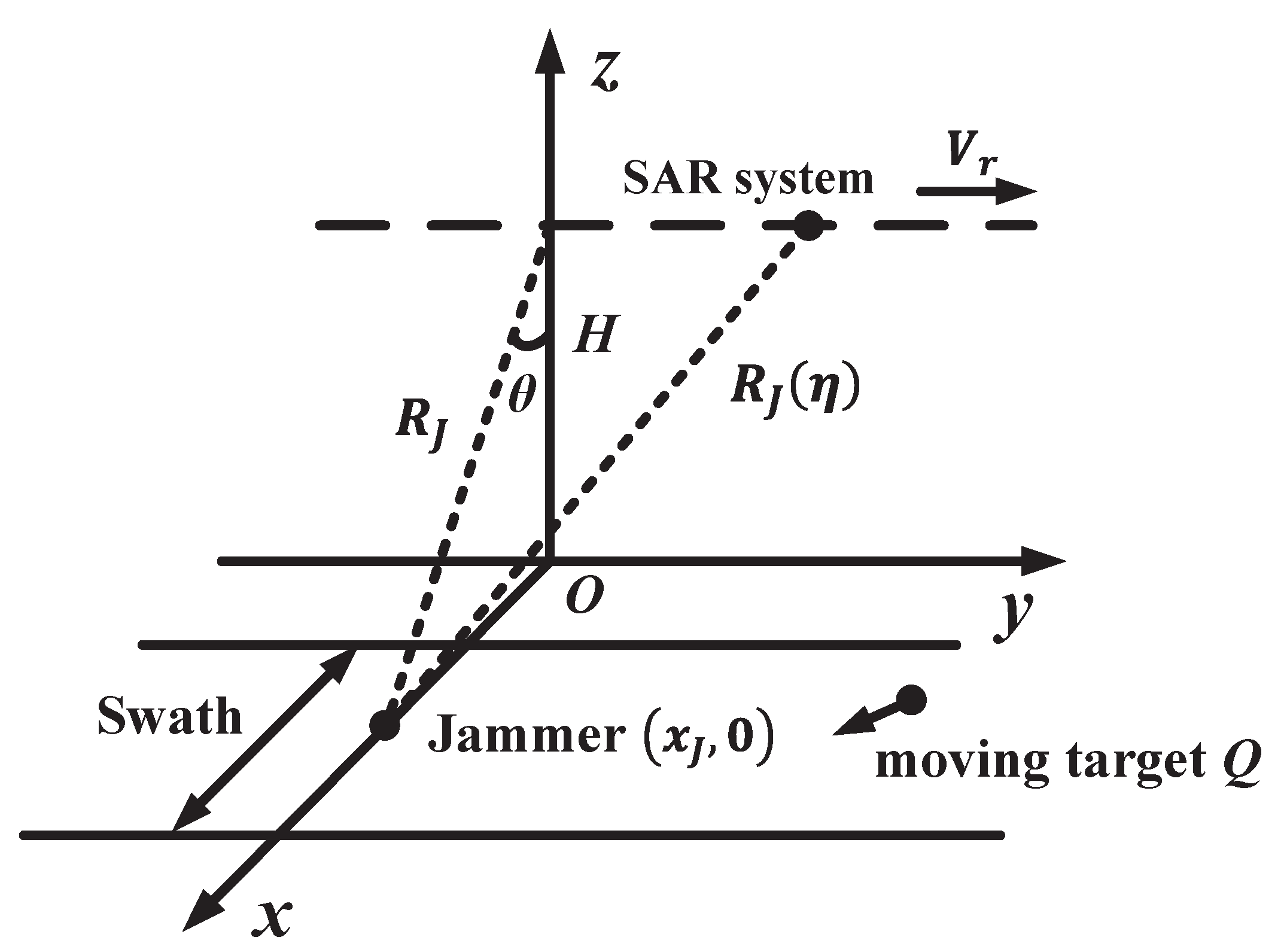
2.1. Analysis of Jamming Scenario and Active Radar Transponder System
2.2. Generation Principle of Chirp-Mismatch Echo Signal
2.3. Principle Analysis of Motion Modulation Jamming
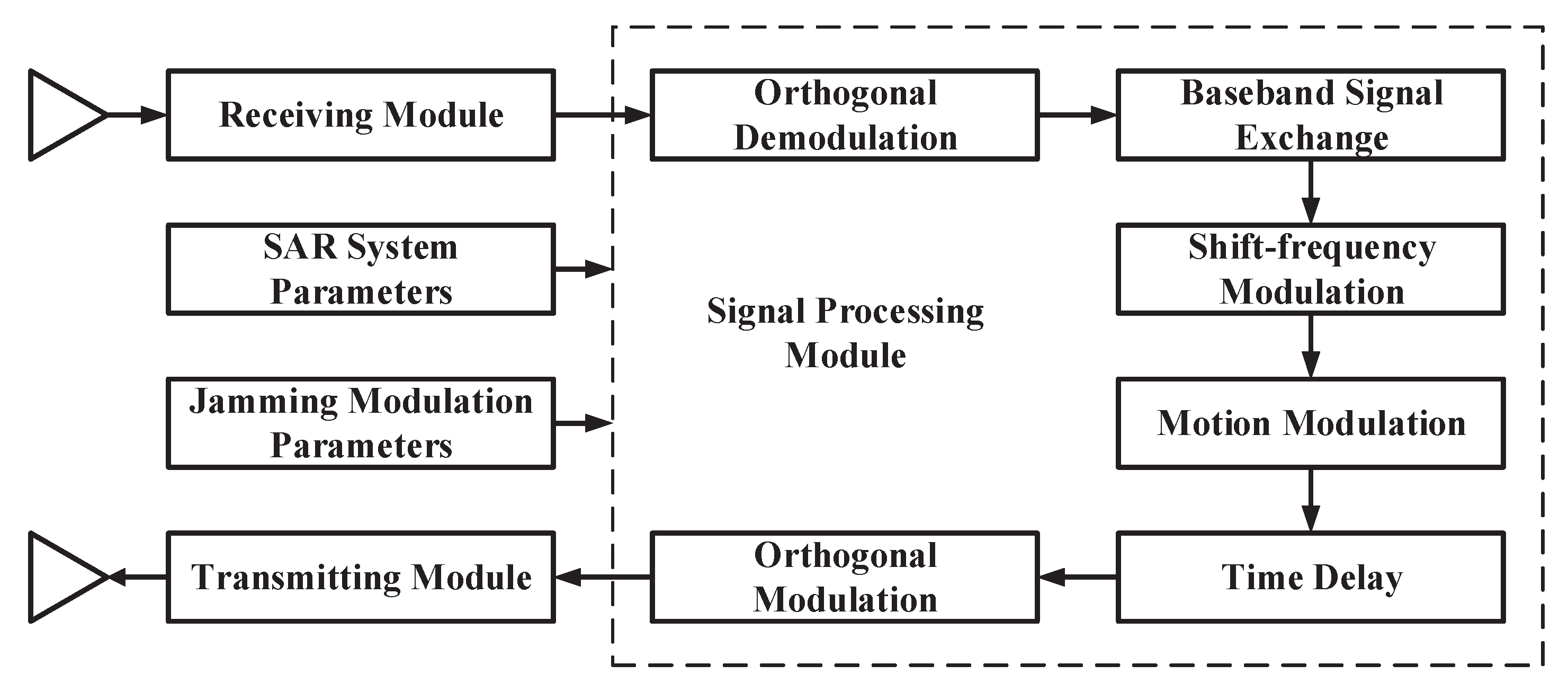
2.4. Generation Principle of Controllable Suppression Jamming Signal
3. Theoretical Analysis of Controllable Suppression Jamming Method
3.1. Imaging Model of Controllable Suppression Jamming Method
3.2. Analysis of the Influence of Reconnaissance Errors
3.3. Analysis of the Variation in Jamming Performance with Modulation Parameters
3.3.1. Range Shift-Frequency Modulation
3.3.2. Velocity Information of Azimuth Motion Modulation
4. Simulation Verification and Analysis of the Suppression Jamming Method
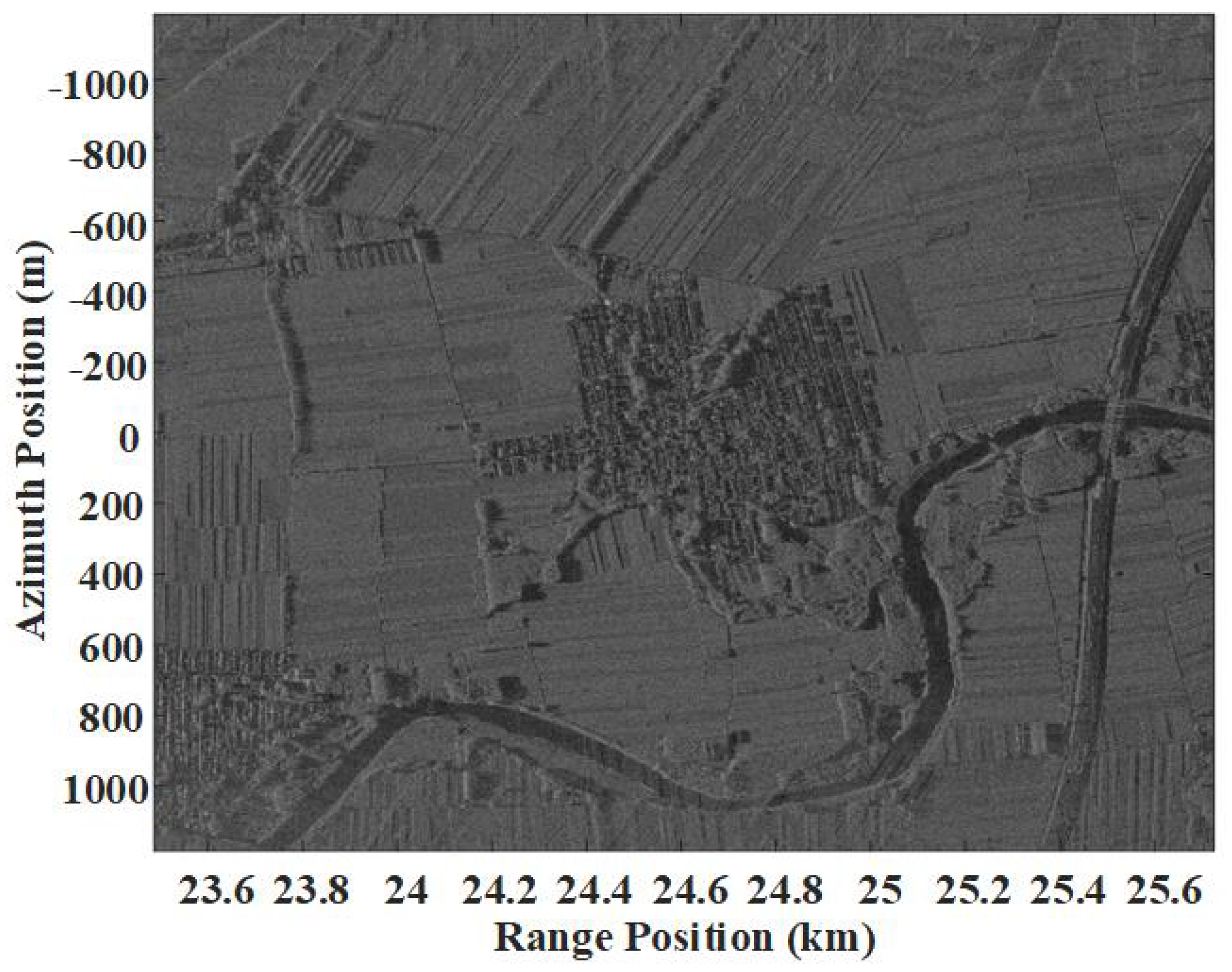
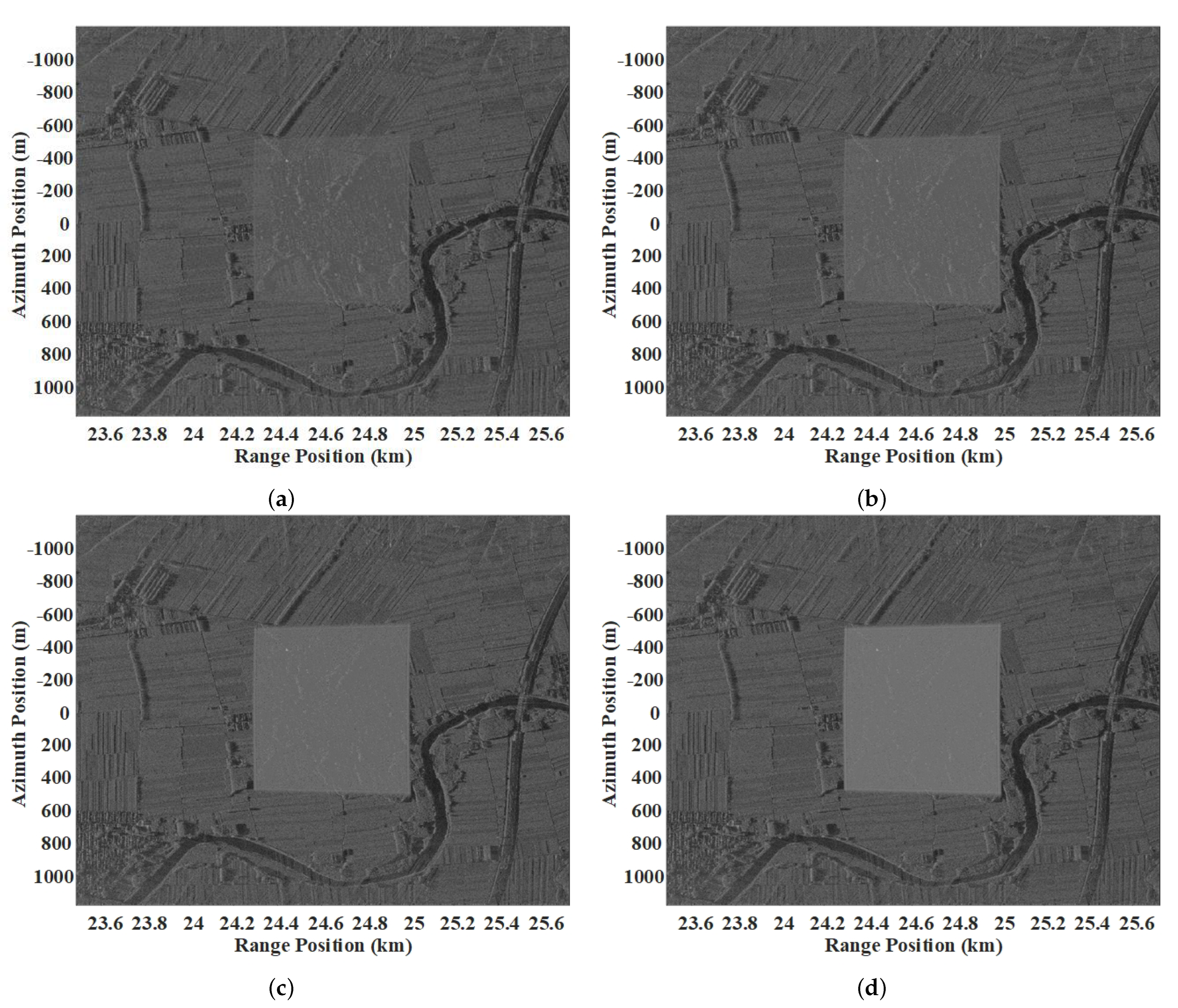
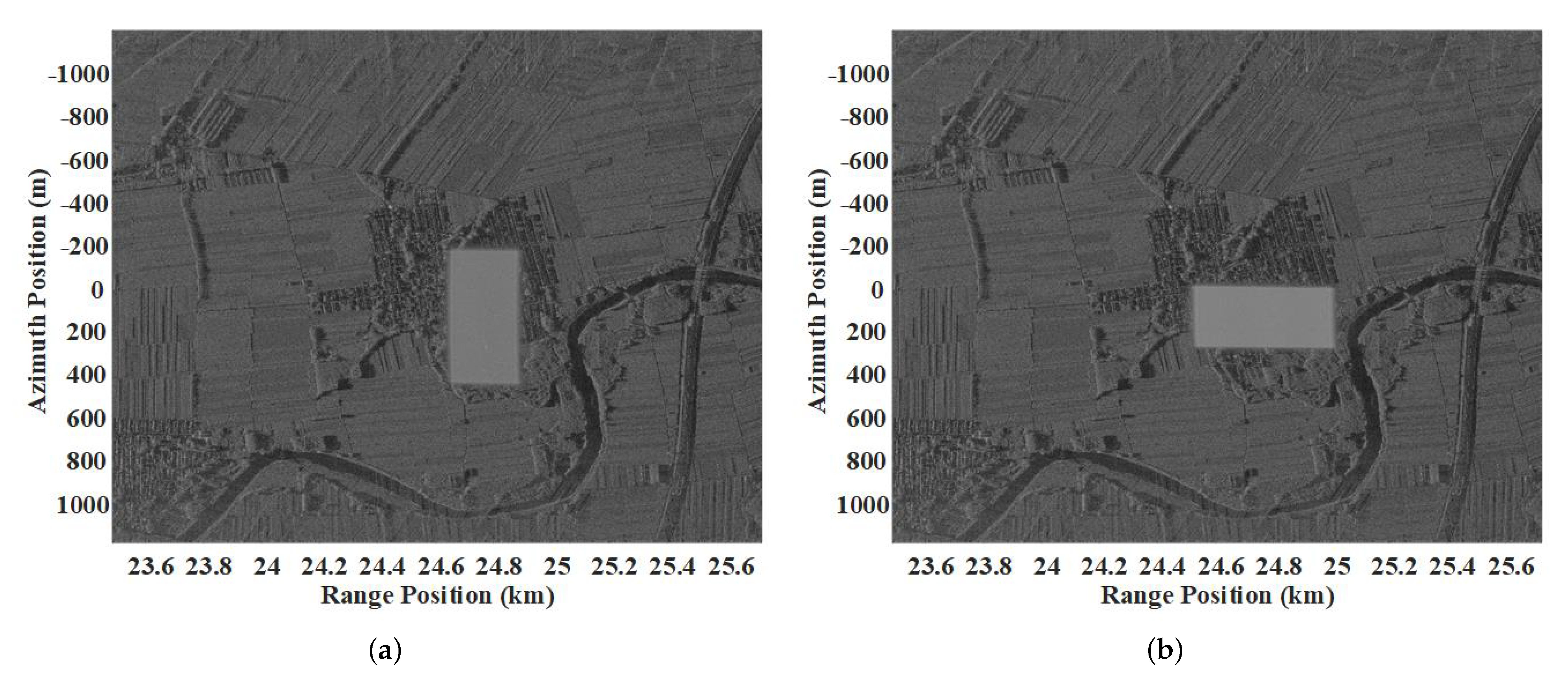
4.1. Validation of the Suppression Jamming Method
4.2. Simulations and Analysis of the Control Effect of Modulation Parameters on Jamming Result
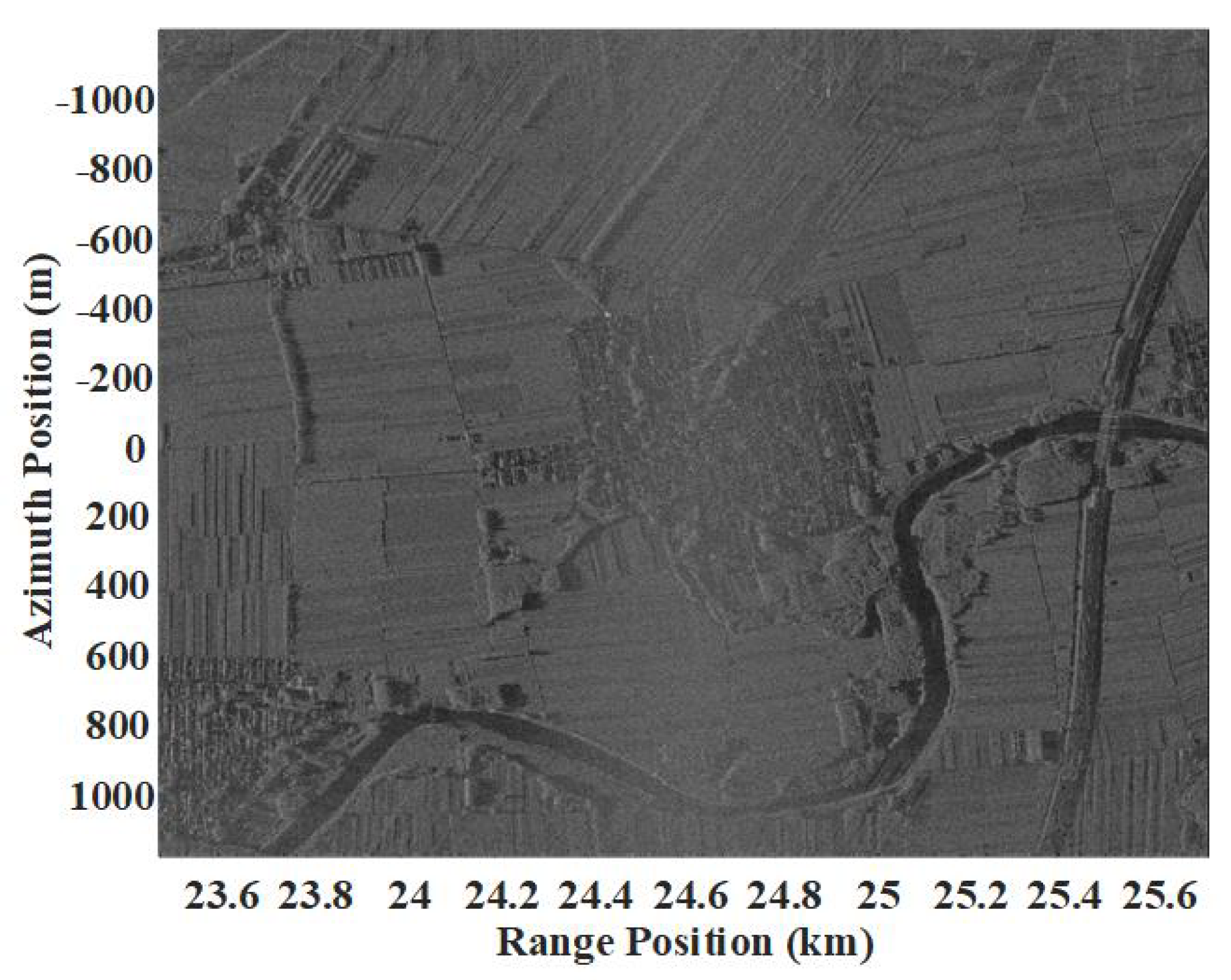
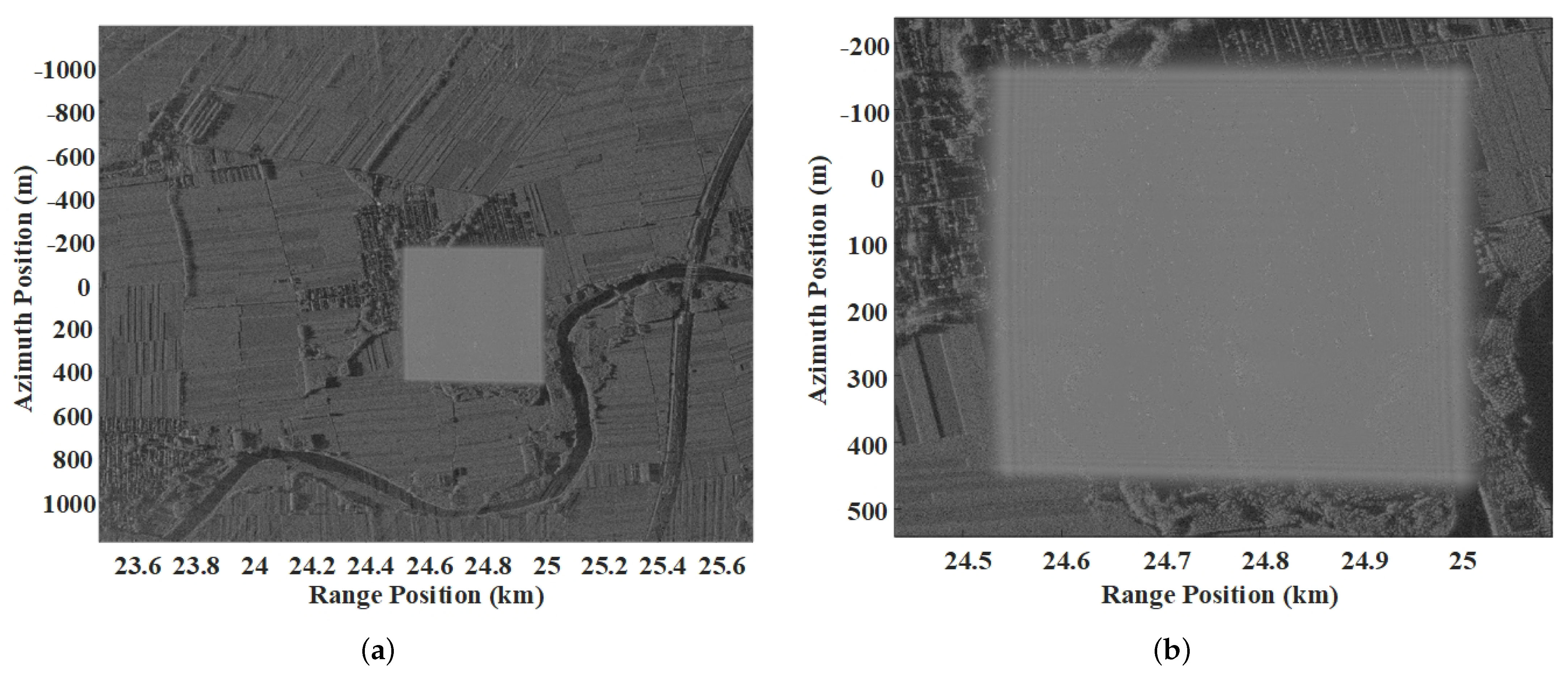
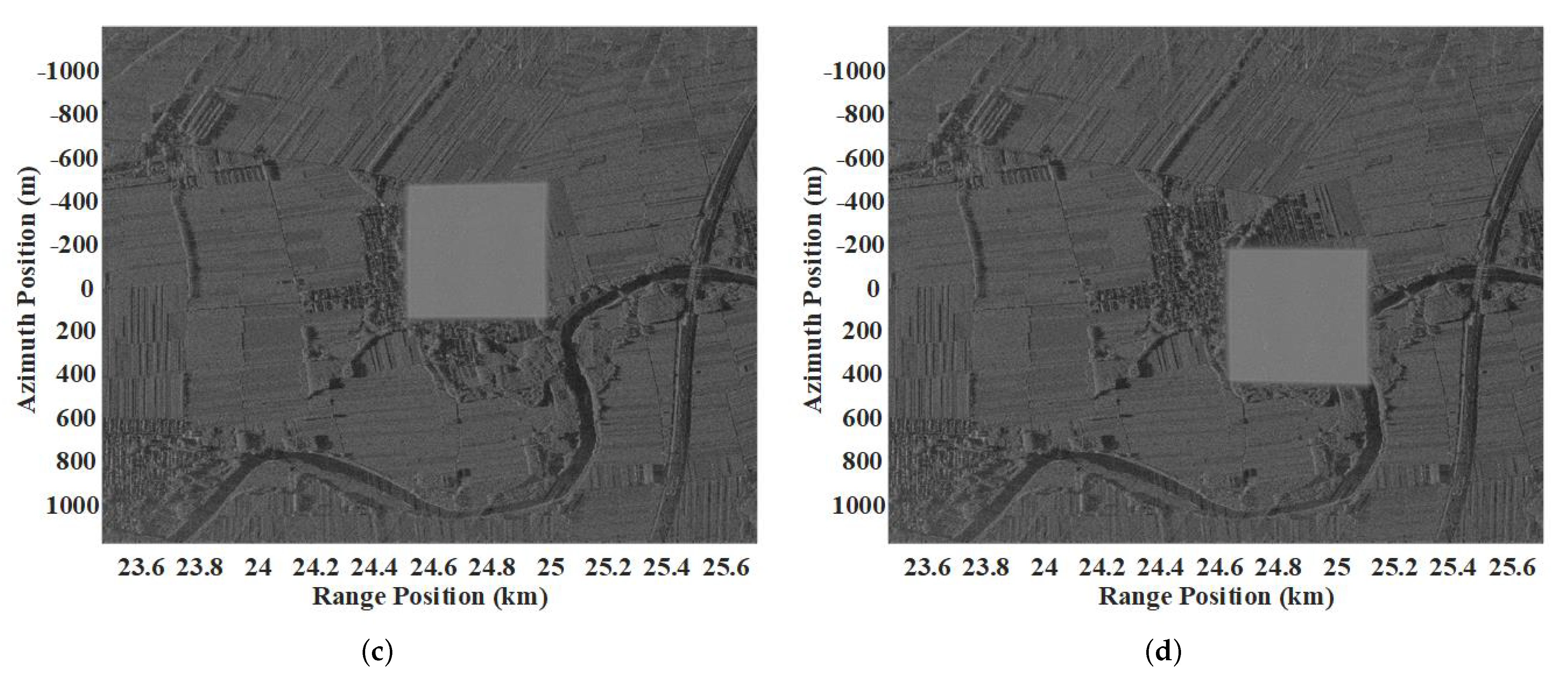
4.3. Simulations and Analysis of the Influence of Reconnaissance Errors
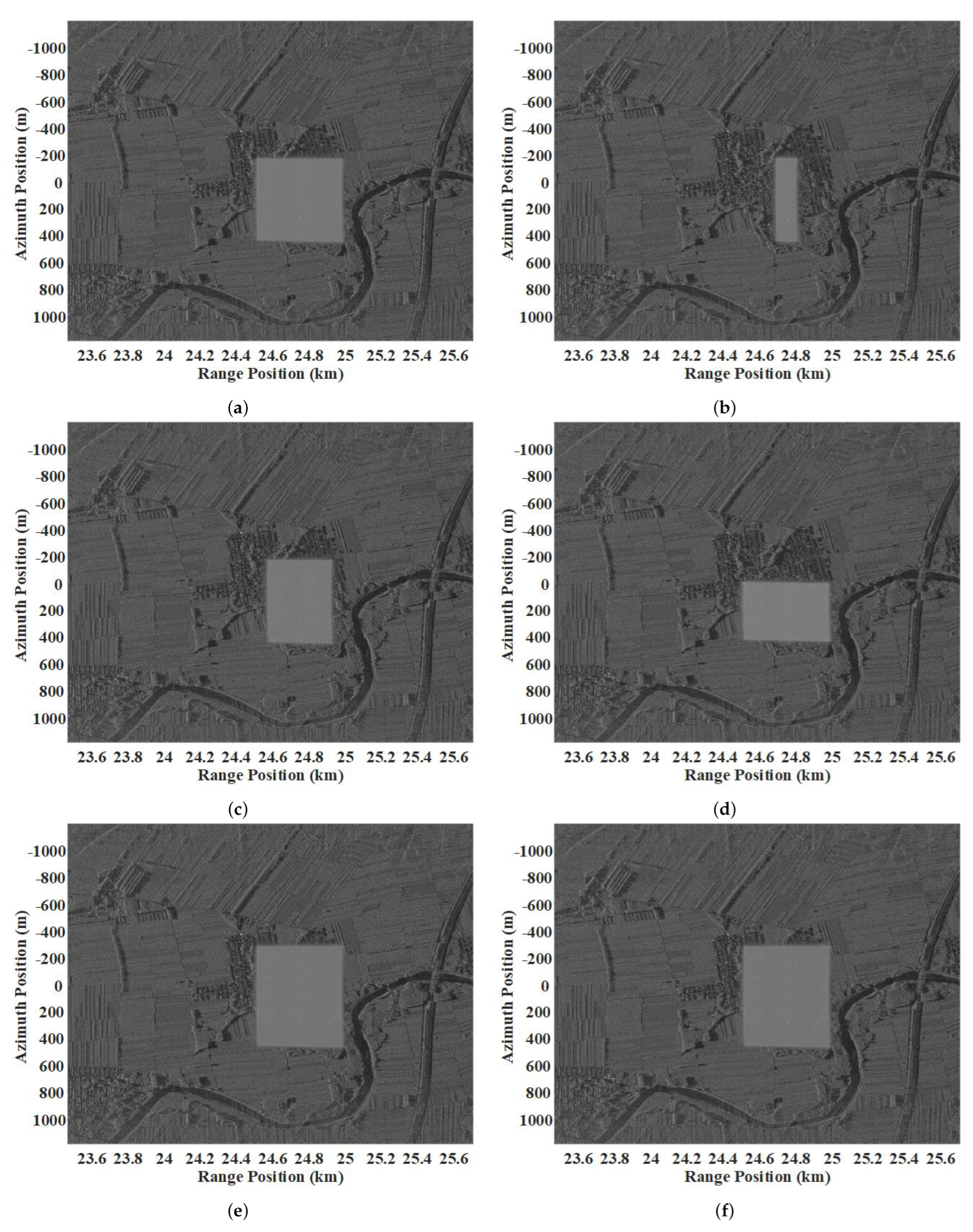
4.4. Simulations and Analysis of the Jamming Performance Variation with Modulation Parameters
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Boston, MA, USA, 2005; pp. 40–60. [Google Scholar]
- Goj, W.W. Synthetic-Aperture Radar and Electronic Warfare; Artech House: Norwood, MA, USA, 1993; pp. 20–40. [Google Scholar]
- Bang, H.; Wang, W.Q.; Zhang, S.; Liao, Y. FDA-Based Space-Time-Frequency Deceptive Jamming Against SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 2127–2140. [Google Scholar] [CrossRef]
- Zhang, Y.; Ai, X.; Fan, Z.; Dai, D. A Doppler history modulated jamming against MIMO SAR. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Chang, X.; Dong, C. A Barrage Noise Jamming Method Based on Double Jammers Against Three Channel SAR GMTI. IEEE Access 2019, 7, 18755–18763. [Google Scholar] [CrossRef]
- Xu, J.; Wang, H. Jamming Simulation of Synthetic Aperture Radar Imaging. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Zhang, J.; Dai, D.; Xing, S.; Xiao, S.; Pang, B. A novel barrage repeater jamming against SAR-GMTI. In Proceedings of the 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 10–15 April 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Shi, Y.; Huang, H.; Ma, Z. An Inter-Pulse Non-Coherent Jamming Technology Against SAR Based on Stepped Time-Delay. In Proceedings of the 2021 7th International Conference on Systems and Informatics (ICSAI), Chongqing, China, 13–15 November 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhou, S.; Yang, L.; Ning, X.; Xing, M. Synthetic Aperture Radar Interference Based on Scene Fusion and Active Cancellation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10375–10382. [Google Scholar] [CrossRef]
- Yang, K.; Ma, F.; Ran, D.; Ye, W.; Li, G. Fast Generation of Deceptive Jamming Signal Against Spaceborne SAR Based on Spatial Frequency Domain Interpolation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Yang, K.; Ye, W.; Ma, F.; Li, G.; Tong, Q. A Large-Scene Deceptive Jamming Method for Space-Borne SAR Based on Time-Delay and Frequency-Shift with Template Segmentation. Remote Sens. 2020, 12, 53. [Google Scholar] [CrossRef]
- Fan, W.; Zhou, F.; Tian, T. A Deceptive Jamming Template Synthesis Method for SAR Using Generative Adversarial Nets. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6926–6929. [Google Scholar] [CrossRef]
- Zhao, B.; Huang, L.; Zhou, F.; Zhang, J. Performance Improvement of Deception Jamming Against SAR Based on Minimum Condition Number. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1039–1055. [Google Scholar] [CrossRef]
- Huang, B.; Wang, W.Q.; Zhang, S.; Wang, H.; Gui, R.; Lu, Z. A Novel Approach for Spaceborne SAR Scattered-Wave Deception Jamming Using Frequency Diverse Array. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1568–1572. [Google Scholar] [CrossRef]
- Yang, K.; Ye, W.; Wu, X.; Ma, F.; Li, G. Fast Generation of Deceptive Jamming Signal Against Space-Borne SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5580–5596. [Google Scholar] [CrossRef]
- Harness, R.S.; Budge, M.C. A study on SAR noise jamming and false target insertion. In Proceedings of the IEEE Southeastcon 2014, Lexington, KY, USA, 13–16 March 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Ammar, M.A.; Abdel-Latif, M.S. A Novel Technique for Generation of Multiple Noise Patches on SAR Image. In Proceedings of the 2020 12th International Conference on Electrical Engineering (ICEENG), Cairo, Egypt, 7–9 July 2020; pp. 277–280. [Google Scholar] [CrossRef]
- Ammar, M.A.; Abdel-Latif, M.S.; Elgamel, S.A.; Azouz, A. Performance Enhancement of Convolution Noise Jamming Against SAR. In Proceedings of the 2019 36th National Radio Science Conference (NRSC), Port Said, Egypt, 16–18 April 2019; pp. 126–134. [Google Scholar] [CrossRef]
- Ye, W.; Ruan, H.; Zhang, S.X.; Yan, L. Study of noise jamming based on convolution modulation to SAR. In Proceedings of the 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; Volume 6, pp. 169–172. [Google Scholar] [CrossRef]
- Liu, G.; Li, L.; Hong, J.; Ming, F. Shift-Frequency Jamming Imaging and Analysis Based on Active Radar Calibrator. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 3948–3951. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Liang, J. Modulation jamming method for high-vivid false uniformly-moving targets against SAR-GMTI. J. Astronaut. 2012, 33, 1472–1479. [Google Scholar] [CrossRef]
- Liu, G.; Li, L.; Hong, J.; Ming, F. Study of Chirp-mismatch SAR Echo Imaging and Application Based on Active Radar Transponder. In Proceedings of the 2022 Photonics & Electromagnetics Research Symposium (PIERS), Hangzhou, China, 25–29 April 2022; pp. 283–287. [Google Scholar] [CrossRef]
- Liang, L.; Jun, H.; Feng, M. Study on digital coded technology in active radar calibrator of SAR. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 4509–4512. [Google Scholar] [CrossRef]
- Ji, P.; Dai, D.; Xing, S.; Feng, D. A Controllable Suppressed Jamming Area Generation Method Against SAR-GMTI Based on Double Synergetic Jammers. J. Signal Process. 2022, 38, 667–676. [Google Scholar] [CrossRef]
- Wu, X.; Dai, D.; Wang, X.; Lu, H. Quantized analysis of the target motion influence on the strip image of airborne sidelooking mode SAR in azimuth direction. J. Signal Process. 2010, 26, 665–672. [Google Scholar]
- Huang, D.; Xing, S.; Liu, Y.; Li, Y.; Xiao, S. Fake SAR signal generation method based on noise convolution modulation. J. Radars 2020, 9, 898–907. [Google Scholar] [CrossRef]
- Yang, L.; Gao, S.; Hu, R.; Wei, H. Performance analysis of coherent jamming and non-coherent jamming against SAR. Syst. Eng. Electron. 2018, 40, 2444–2449. [Google Scholar] [CrossRef]
- Liang, W. Study on Intelligent Jamming Policy and Jamming Methods of SAR. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2019. [Google Scholar]
- Han, G.Q.; Li, Y.Z.; Wang, X.S.; Xing, S.Q.; Liu, Q.F. Evaluation of jamming effect on SAR based on method of modified structural similarity. J. Electron. Inf. Technol. 2011, 33, 711–716. [Google Scholar] [CrossRef]
- Tian, T.; Zhou, F.; Li, Y.; Sun, B.; Fan, W.; Gong, C.; Yang, S. Performance Evaluation of Deception Against Synthetic Aperture Radar Based on Multifeature Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 103–115. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Parameter Value |
|---|---|
| Radar center frequency | 9.6 GHz |
| Slant range of scene center | 25.54 km |
| Effective velocity of radar | 154.2 m/s |
| Transmitted pulse duration | 2.4 s |
| Transmitted pulse bandwidth | 480 MHz |
| Azimuth beam width | 0.04 rad |
| JSR (dB) | The Mean-Normalized Correlation Measure | The Structural Similarity |
|---|---|---|
| 0 | 0.8642 | 0.4565 |
| 3 | 0.8231 | 0.3094 |
| 6 | 0.7908 | 0.1890 |
| 9 | 0.7789 | 0.1092 |
| Range Frequency Shift Amount (MHz) | Range Coverage (m) | Energy Value of Jamming Result | Power Value of Jamming Result |
|---|---|---|---|
| 0 | 705.3 | ||
| 60 | 619 | ||
| 120 | 528.1 | ||
| 180 | 438.5 | ||
| 240 | 348.4 | ||
| 300 | 258.5 |
| Velocity Information (m/s) | Azimuth Coverage (m) | Energy Value of Jamming Result | Power Value of Jamming Result |
|---|---|---|---|
| −50 | 244.6 | ||
| −40 | 413.4 | ||
| −30 | 574.4 | ||
| −20 | 726.8 | ||
| −10 | 870.6 | ||
| 0 | 1005.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Li, L.; Ming, F.; Sun, X.; Hong, J. A Controllable Suppression Jamming Method against SAR Based on Active Radar Transponder. Remote Sens. 2022, 14, 3949. https://doi.org/10.3390/rs14163949
Liu G, Li L, Ming F, Sun X, Hong J. A Controllable Suppression Jamming Method against SAR Based on Active Radar Transponder. Remote Sensing. 2022; 14(16):3949. https://doi.org/10.3390/rs14163949
Chicago/Turabian StyleLiu, Guikun, Liang Li, Feng Ming, Xilong Sun, and Jun Hong. 2022. "A Controllable Suppression Jamming Method against SAR Based on Active Radar Transponder" Remote Sensing 14, no. 16: 3949. https://doi.org/10.3390/rs14163949