
Validation of IMERG Oceanic Precipitation over Kwajalein

 , ,
, , 
Abstract
:1. Introduction
2. The Kwajalein Oceanic Validation Site and Data Products
2.1. The Kwajalein Oceanic Validation Site and KPOL Precipitation Rates
2.2. IMERG Product and Categorization by Source
3. Methodology and Evaluation Metrics
4. Comparisons of IMERG and KPOL
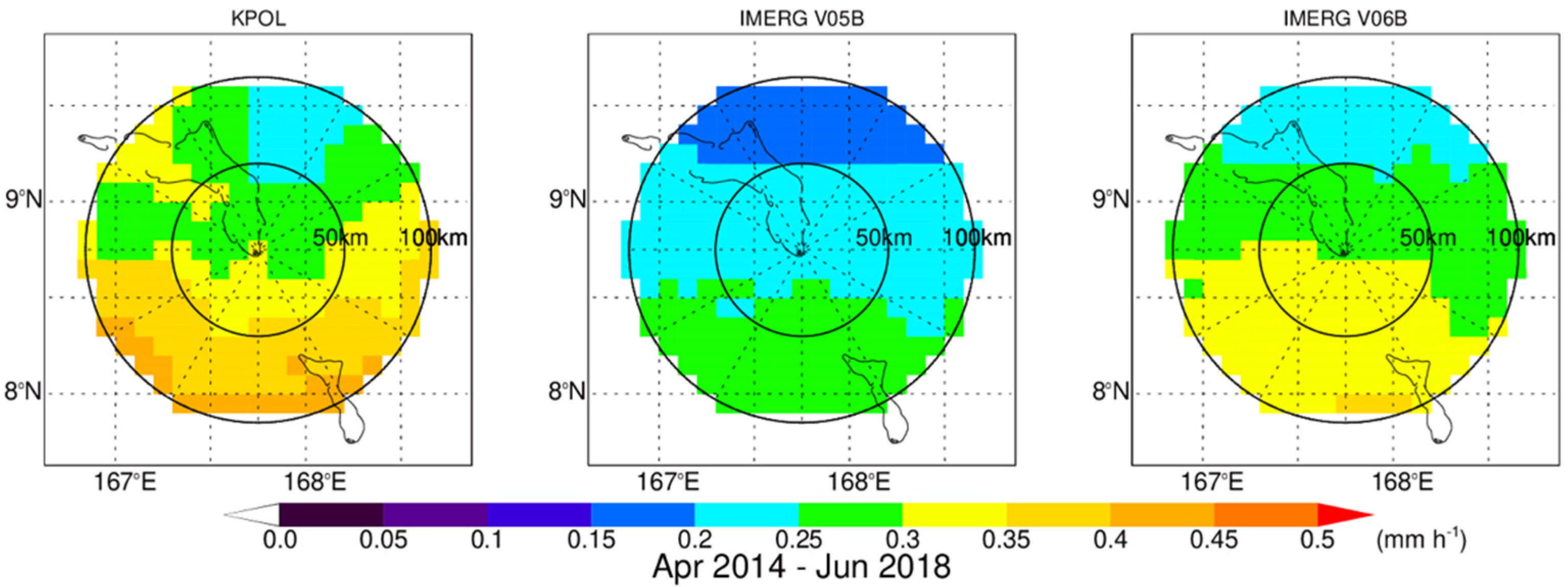
4.1. Mean Monthly Precipitation Maps

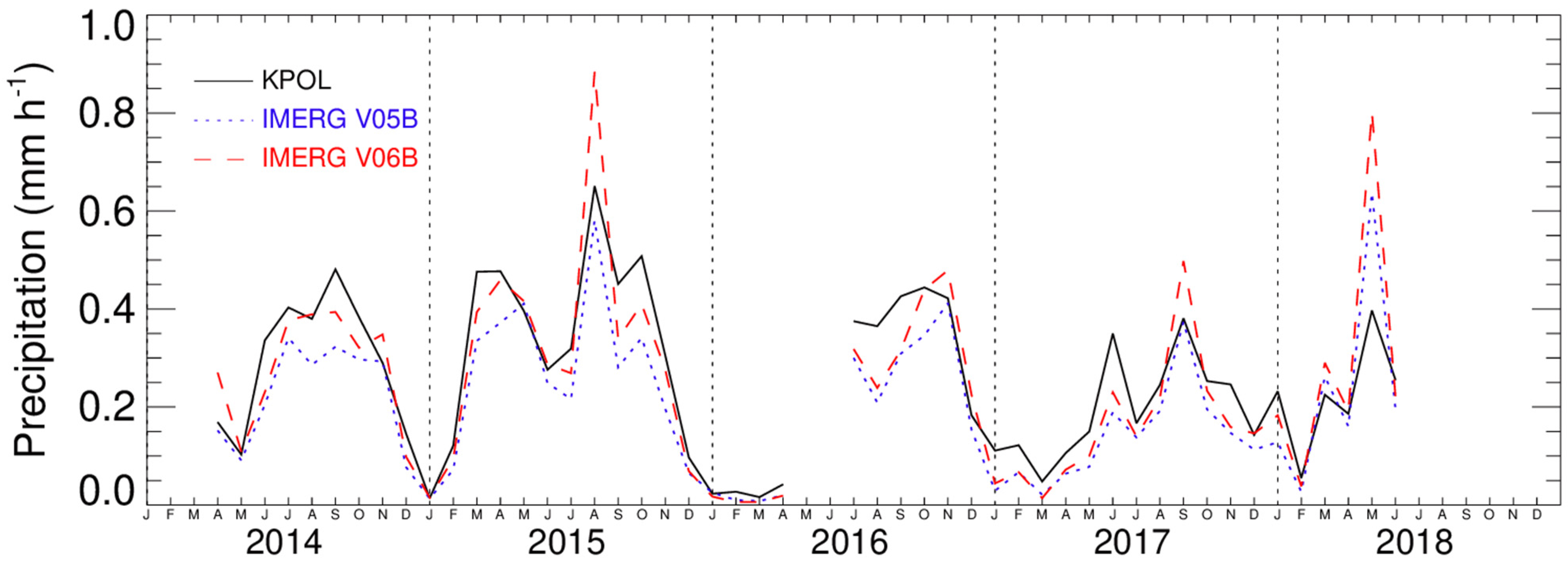
4.2. Time Series of Spatially Averaged Monthly Precipitation
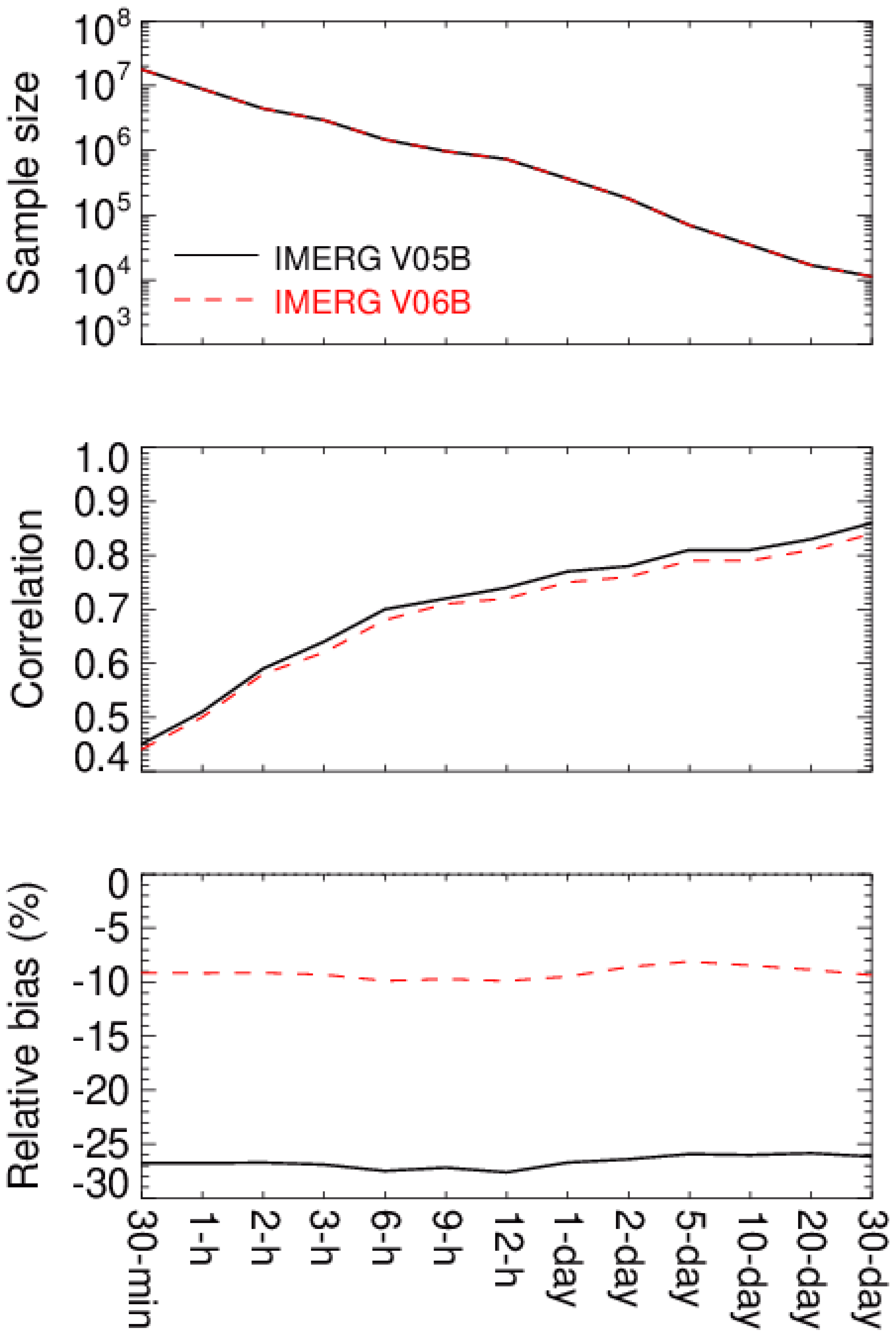
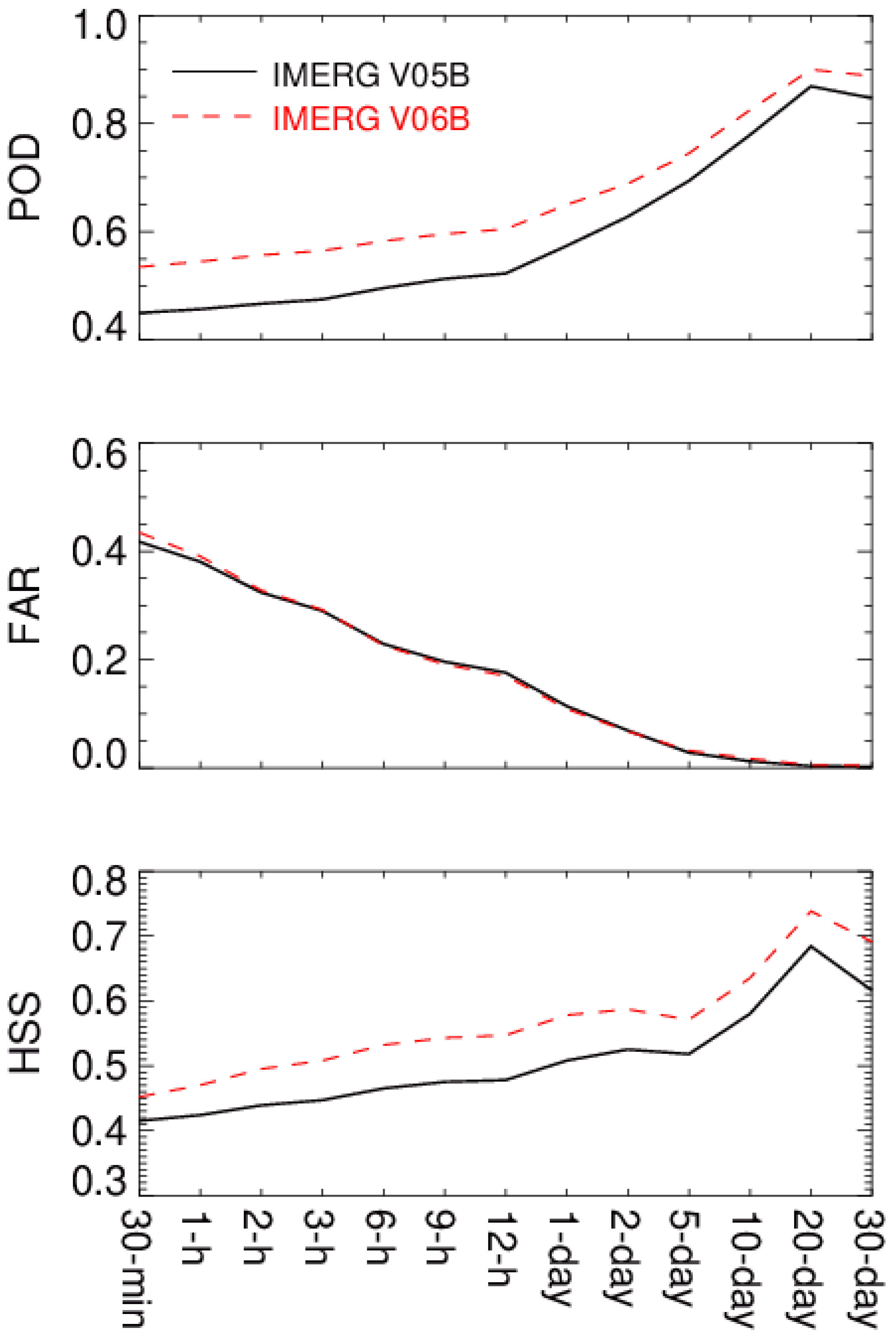
4.3. Mean Precipitation Rates from 5-min to 30-Day Scale
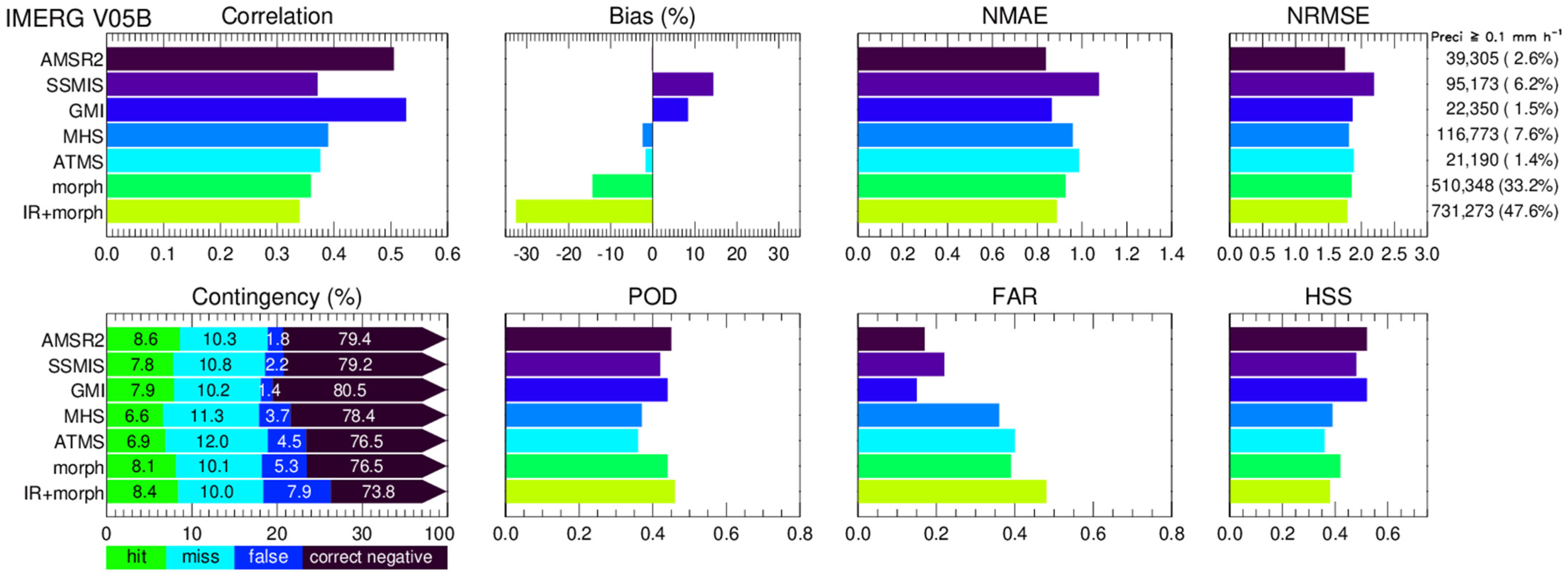
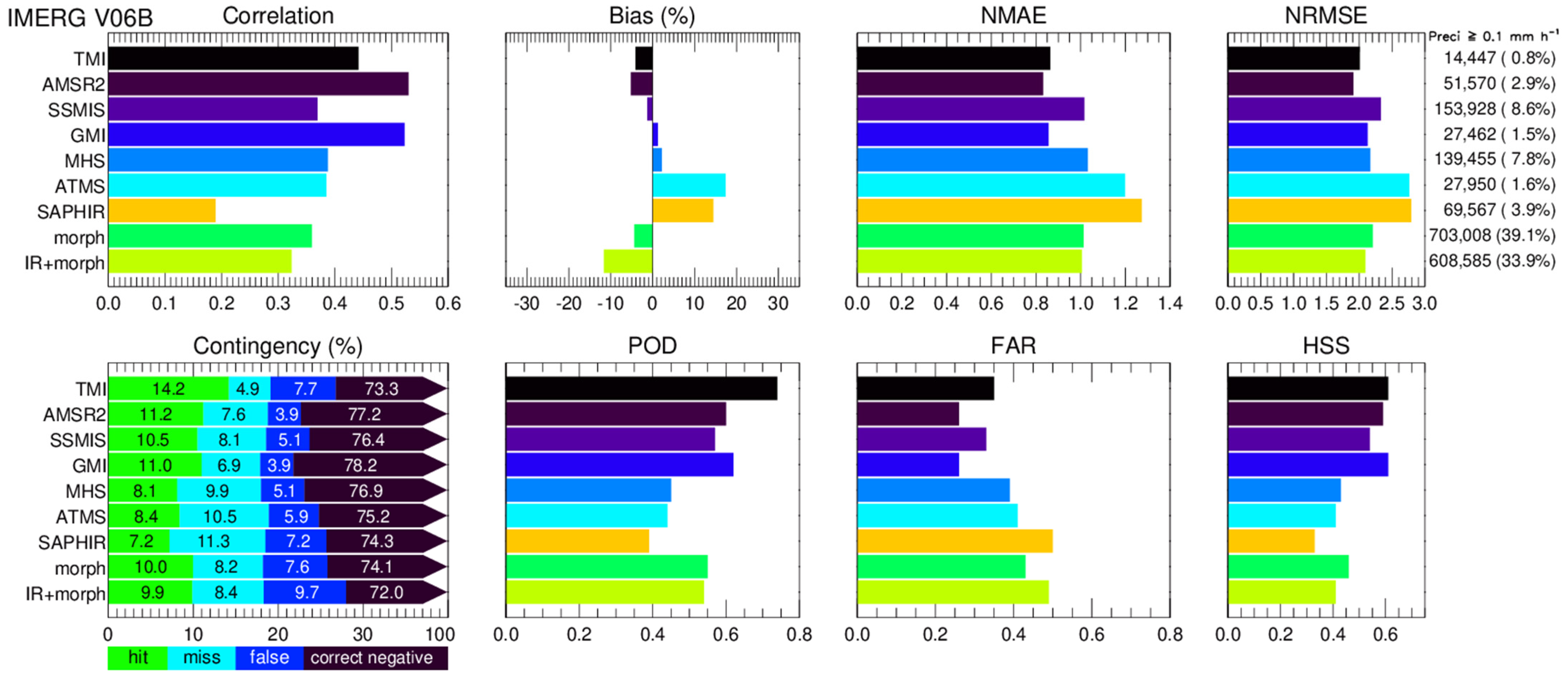
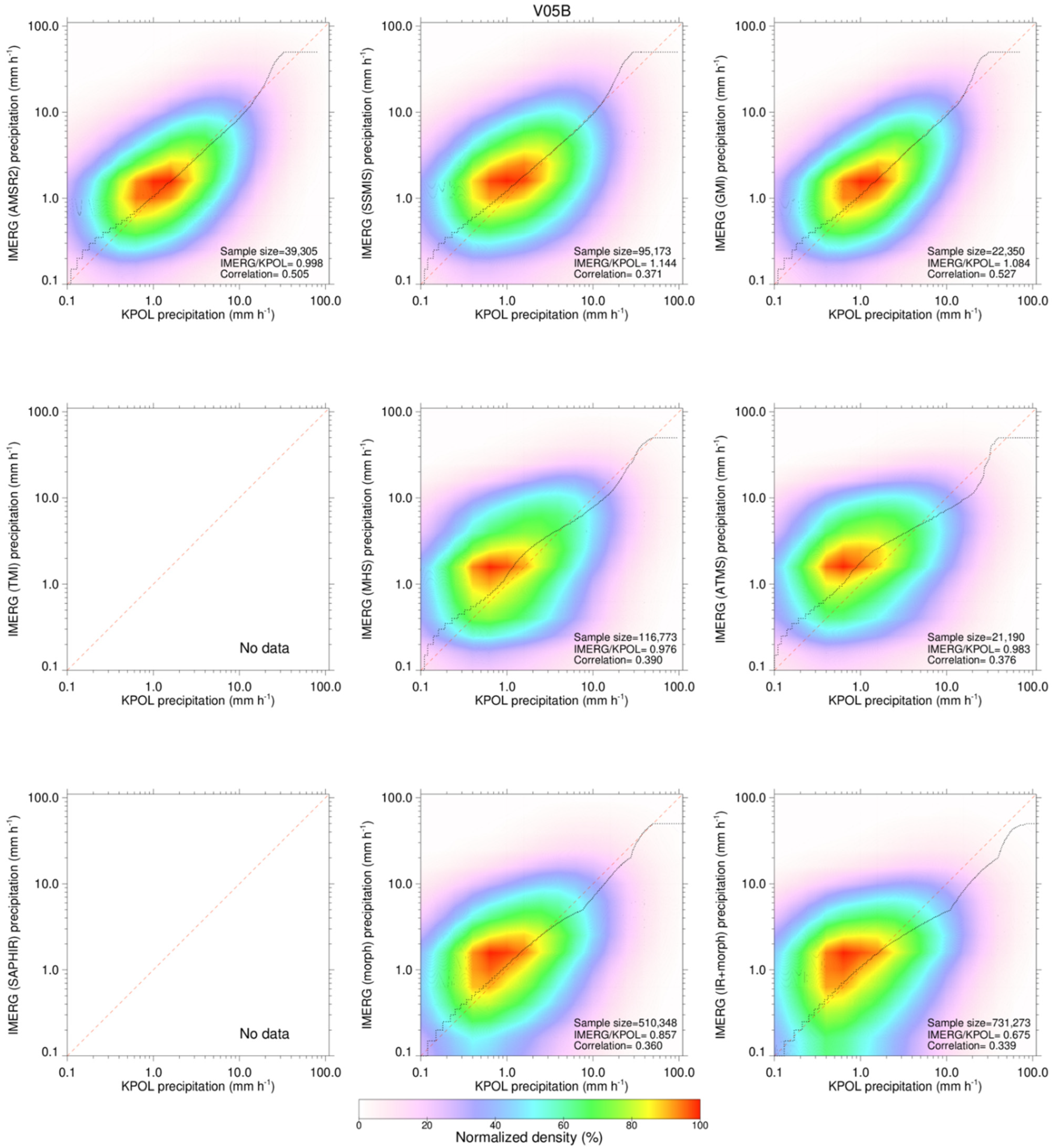
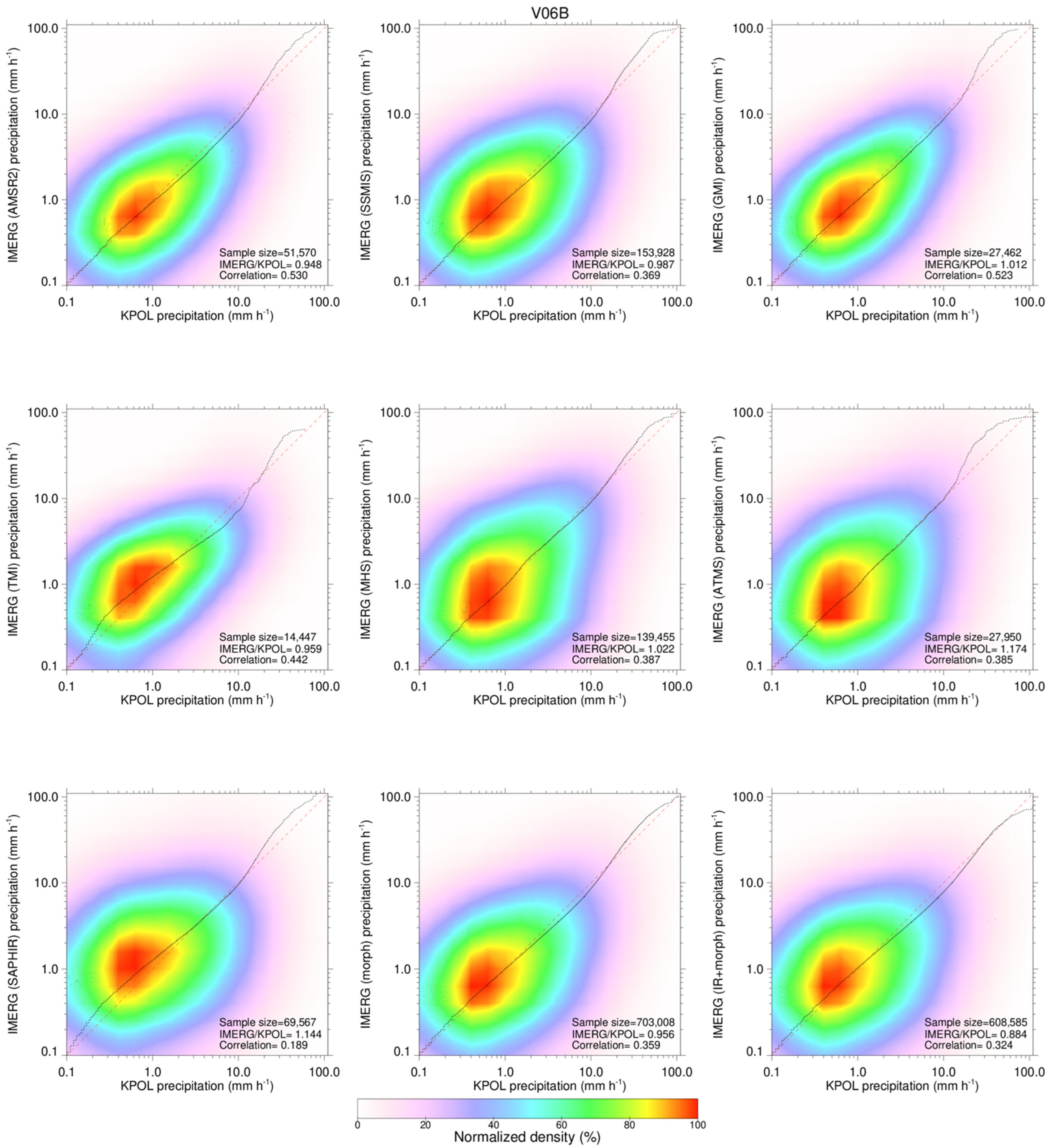
4.4. Categorization by Source
5. Discussion
6. Conclusions
- (1)
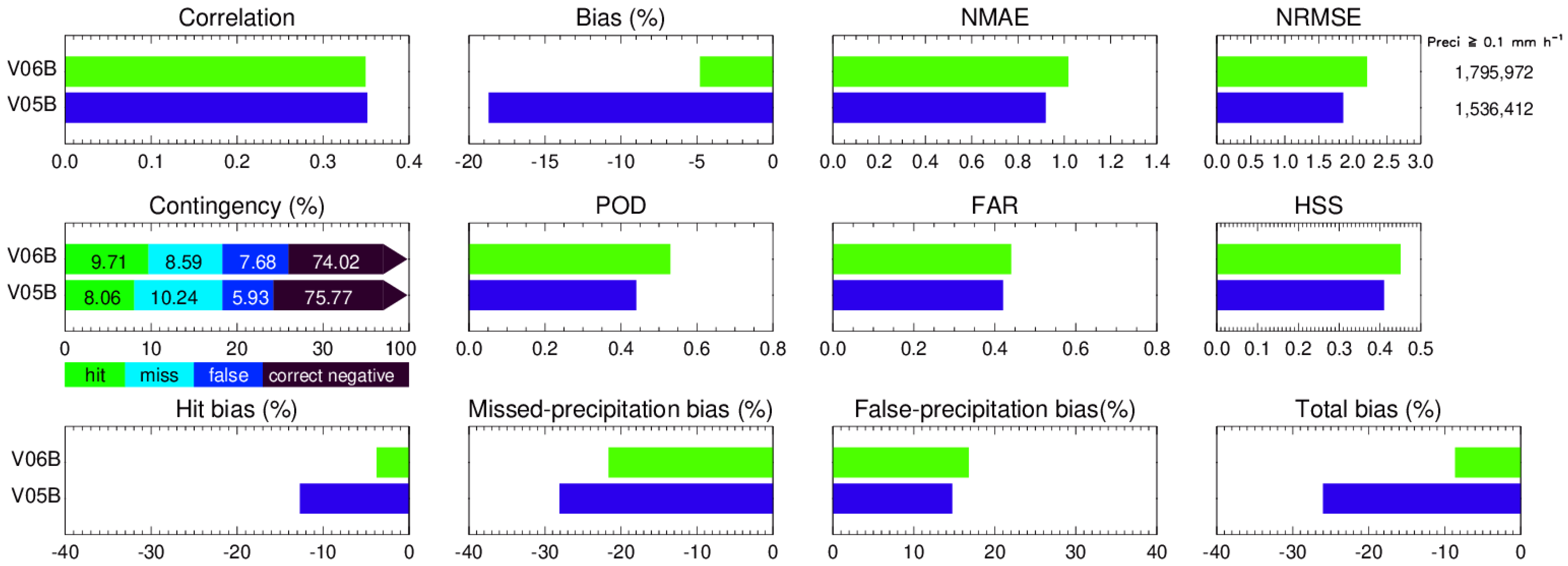
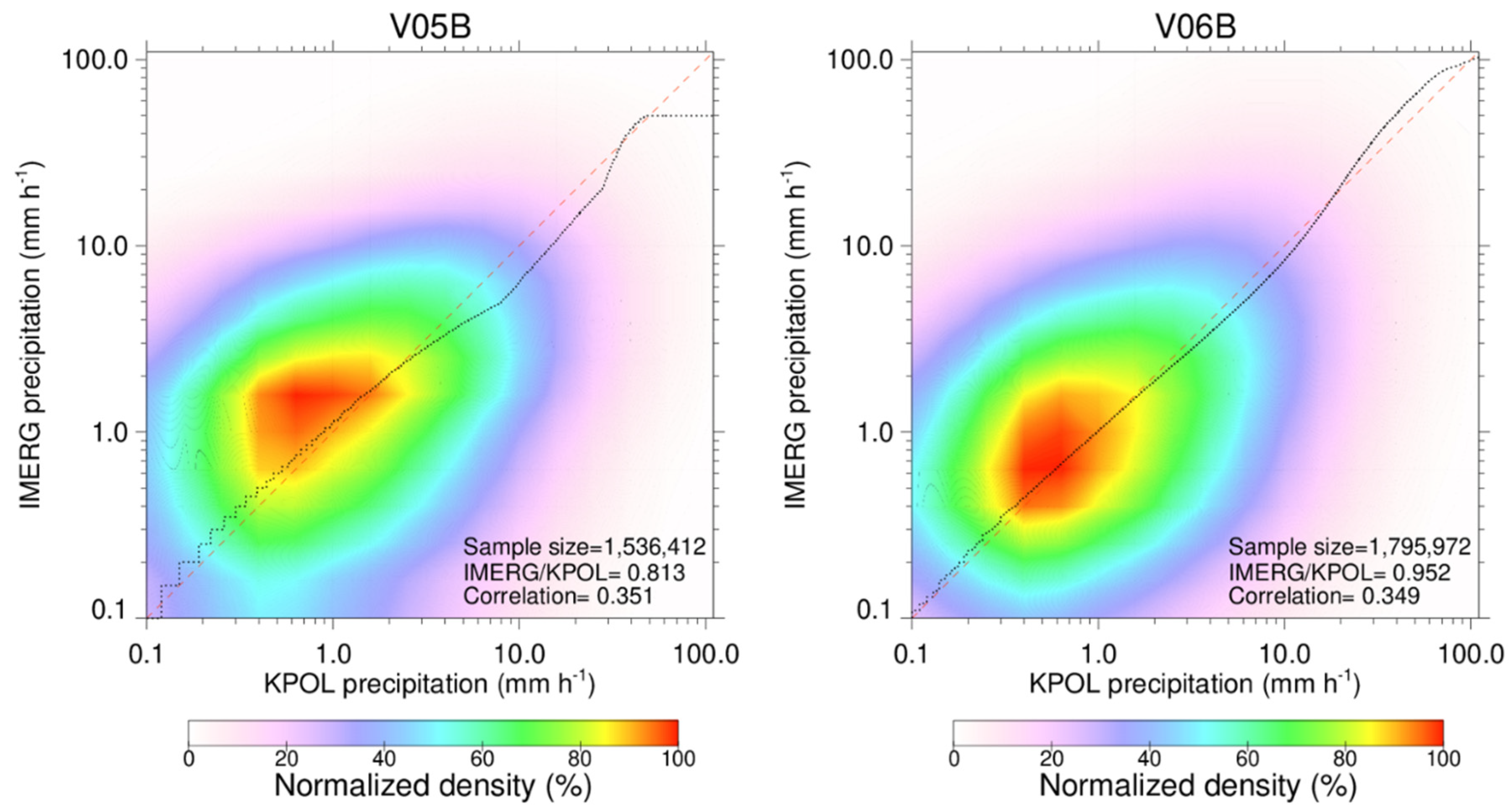
- Both IMERG V05B and V06B display a general pattern similar to KPOL with decreasing precipitation from south to north. Precipitation contours for IMERG V05B and V06B are smoother than those for KPOL because of the challenges in capturing the fine-scale features by satellite observations. Precipitation rates from both IMERG V05B and V06B are underestimated, but the underestimation from V06B is much reduced. IMERG V06 displays an obvious improvement with reduced systematic bias and increased precipitation detectability in comparison with V05B.
- (2)
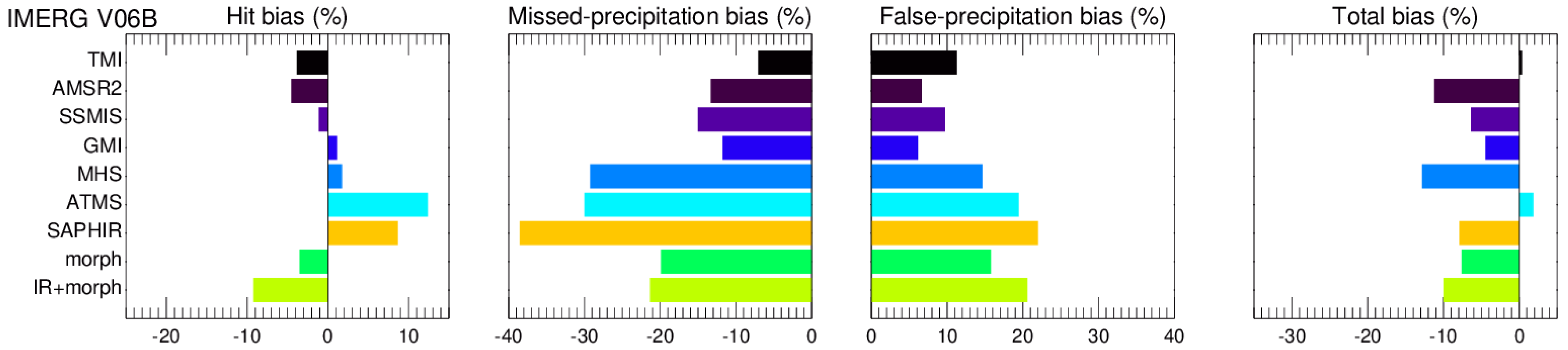
- The overall underestimation in V05B is mainly driven by the negative relative biases of morphing-based algorithms (IR + morph and morph-only) which are largely corrected in V06B.
- (3)
- Imagers generally perform better than sounder because of the availability of lower frequency channels. Among imagers, GMI and AMSR2 are the best, followed by SSMIS. Among sounders, MHS is the best, followed by ATMS and SAPHIR. Among all categories, morph-only and IR + morph only perform better than SAPHIR. SAPHIR shows the worst performance among all categories in terms of almost all metrics because SAPHIR has only 183.3 GHz channels.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Trenberth, K.E.; Smith, L.; Qian, T.; Dai, A.; Fasullo, J. Estimates of the global water budget and its annual cycle using observational and model data. J. Hydrometeorol. 2007, 8, 758–769. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Stocker, E.F.; Tan, J. V05 IMERG Release Notes; NASA: Washington, DC, USA, 2017; 8p. Available online: https://gpm.nasa.gov/sites/default/files/document_files/IMERG_FinalRun_V05_release_notes-rev3.pdf (accessed on 29 June 2022).
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Kidd, C.; Nelkin, E.J.; Sorooshian, S.; Tan, J.; Xie, P. NASA Global Precipitation Measurement (GPM) Integrated Multi-satellitE Retrievals for GPM (IMERG). Algorithm Theoretical Basis Document Version 6; NASA: Washington, DC, USA, 2020; 35p. Available online: https://gpm.nasa.gov/sites/default/files/2020-05/IMERG_ATBD_V06.3.pdf (accessed on 29 June 2022).
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Stocker, E.F.; Tan, J. V06 IMERG Release Notes; NASA: Washington, DC, USA, 2020; 15p. Available online: https://gpm.nasa.gov/sites/default/files/2020-10/IMERG_V06_release_notes_201006_0.pdf (accessed on 29 June 2022).
- Petersen, W.A.; Kirstetter, P.E.; Wang, J.; Wolff, D.B.; Tokay, A. The GPM Ground Validation Program. In Satellite Precipitation Measurement; Levizzani, V., Kidd, C., Kirschbaum, D.B., Kummerow, C., Nakamura, K., Turk, F.J., Eds.; Springer-Nature: Cham, Switzerland, 2020. [Google Scholar]
- Wang, J.; Petersen, W.A.; Wolff, D.B. Validation of Satellite-Based Precipitation Products from TRMM to GPM. Remote Sens. 2021, 13, 1745. [Google Scholar] [CrossRef]
- Prakash, S.; Ramesh Kumar, M.R.; Mathew, S.; Venkatesan, R. How accurate are satellite estimates of precipitation over the north Indian Ocean? Theor. Appl. Climatol. 2018, 134, 467–475. [Google Scholar] [CrossRef] [Green Version]
- Khan, S.; Maggioni, V. Assessment of Level-3 Gridded Global Precipitation Mission (GPM) Products Over Oceans. Remote Sens. 2019, 11, 255. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Wang, Y. Comparison of oceanic multisatellite precipitation data from tropical rainfall measurement mission and global precipitation measurement mission datasets with rain gauge data from ocean buoys. J. Atmos. Ocean. Technol. 2019, 36, 903–920. [Google Scholar] [CrossRef]
- Bolvin, D.; Huffman, G.; Nelkin, E.; Tan, J. Comparison of Monthly IMERG Precipitation Estimates with PACRAIN Atoll Observations. J. Hydrometeorol. 2021, 22, 1745–1753. [Google Scholar] [CrossRef]
- Derin, Y.; Kirstetter, P.-E.; Gourley, J.J. Evaluation of IMERG satellite precipitation over the land–coast–ocean continuum. Part I: Detection. J. Hydrometeorol. 2021, 22, 2843–2859. [Google Scholar] [CrossRef]
- Derin, Y.; Kirstetter, P.-E.; Brauer, N.; Gourley, J.J.; Wang, J. Evaluation of IMERG satellite precipitation over the land–coast–ocean continuum. Part II: Quantification. J. Hydrometeorol. 2022. accepted. [Google Scholar] [CrossRef]
- Wolff, D.B.; Marks, D.A.; Amitai, E.; Silberstein, D.S.; Fisher, B.L.; Tokay, A.; Wang, J.; Pippitt, J.L. Ground Validation for the Tropical Rainfall Measuring Mission (TRMM). J. Atmos. Ocean. Technol. 2005, 22, 365–380. [Google Scholar] [CrossRef]
- Schumacher, C.; Houze, R.A. Comparison of radar data from TRMM satellite and Kwajalein oceanic validation site. J. Appl. Meteorol. 2000, 39, 2151–2164. [Google Scholar] [CrossRef] [Green Version]
- Marks, D.A.; Wolff, D.B.; Carey, L.B.; Tokay, A. Quality control and calibration of the dual-polarization radar at Kwajalein, RMI. J. Atmos. Ocean. Technol. 2011, 28, 181–196. [Google Scholar] [CrossRef]
- Ryzhkov, A.V.; Giangrande, S.E.; Melnikov, V.M.; Schuur, T.J. Calibration issues of dual-polarization radar measurements. J. Atmos. Ocean. Technol. 2005, 22, 1138–1154. [Google Scholar] [CrossRef] [Green Version]
- Zrnić, D.S.; Melnikov, V.M.; Carter, J.K. Calibrating Differential Reflectivity on the WSR-88D. J. Atmos. Ocean. Technol. 2006, 23, 944–951. [Google Scholar] [CrossRef] [Green Version]
- Silberstein, D.S.; Wolff, D.B.; Marks, D.A.; Atlas, D.; Pippitt, J.L. Ground Clutter as a Monitor of Radar Stability at Kwajalein, RMI. J. Atmos. Ocean. Technol. 2007, 25, 2037–2045. [Google Scholar] [CrossRef]
- Marks, D.A.; Wolff, D.B.; Silberstein, D.D.; Tokay, A.; Pippitt, J.L.; Wang, J. Availability of High Quality TRMM Ground Validation Data at Kwajalein, RMI: A Practical Application of the Relative Calibration Adjustment Technique. J. Atmos. Ocean. Technol. 2009, 26, 413–429. [Google Scholar] [CrossRef]
- Wolff, D.B.; Marks, D.A.; Petersen, W.A. General Application of the Relative Calibration Adjustment (RCA) Technique for Monitoring and Correcting Radar Reflectivity Calibration. J. Atmos. Ocean. Technol. 2015, 32, 496–506. [Google Scholar] [CrossRef]
- Cifelli, R.; Chandrasekar, V.; Lim, S.; Kennedy, P.C.; Wang, Y.; Rutledge, S.A. A new dual-polarization radar rainfall algorithm: Application in Colorado precipitation events. J. Atmos. Ocean. Technol. 2011, 28, 352–364. [Google Scholar] [CrossRef] [Green Version]
- Barnes, S. A Technique for Maximizing Details in Numerical Weather Map Analysis. J. Appl. Meteorol. Climatol. 1964, 3, 396–409. [Google Scholar] [CrossRef] [Green Version]
- Helmus, J.J.; Collis, S.M. The Python ARM Radar Toolkit (Py-ART), a Library for Working with Weather Radar Data in the Python Programming Language. J. Open Res. Softw. 2016, 4, e25. [Google Scholar] [CrossRef] [Green Version]
- Joyce, R.J.; Xie, P. Kalman Filter–Based CMORPH. J. Hydrometeorol. 2011, 12, 1547–1563. [Google Scholar] [CrossRef]
- Hong, Y.; Hsu, K.-L.; Sorooshian, S.; Gao, X. Precipitation Estimation from Remotely Sensed Imagery Using an Artificial Neural Network Cloud Classification System. J. Appl. Meteorol. 2004, 43, 1834–1853. [Google Scholar] [CrossRef] [Green Version]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-Global, Multiyear, Combined-Sensor Precipitation Estimates at Fine Scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Kidd, C. NASA Global Precipitation Measurement (GPM) Precipitation Retrieval and Profiling Scheme (PRPS). Algorithm Theoretical Basis Doc., Version 01-02; NASA: Washington, DC, USA, 2018; 17p. Available online: https://pps.gsfc.nasa.gov/Documents/20180203_SAPHIR-ATBD.pdf (accessed on 29 June 2022).
- Tan, J.; Petersen, W.A.; Tokay, A. A Novel Approach to Identify Sources of Errors in IMERG for GPM Ground Validation. J. Hydrometeorol. 2016, 17, 2477–2491. [Google Scholar] [CrossRef]
- Wilks, D.S. Statistical Methods in the Atmospheric Sciences, 3rd ed.; International Geophysics Series; Academic Press: Waltham, MA, USA, 2011; Volume 100, p. 704. [Google Scholar]
- Tian, Y.; Peters-Lidard, C.D.; Eylander, J.B.; Joyce, R.J.; Huffman, G.J.; Adler, R.F.; Hsu, K.-L.; Turk, F.J.; Garcia, M.; Zeng, J. Component analysis of errors in satellite-based precipitation estimates. J. Geophys. Res. 2009, 114, D24101. [Google Scholar] [CrossRef] [Green Version]
- Habib, E.; Larson, B.F.; Graschel, J. Validation of NEXRAD multisensor precipitation estimates using an experimental dense rain gauge network in south Louisiana. J. Hydrol. 2009, 373, 463–478. [Google Scholar] [CrossRef]
- You, Y.; Petkovic, V.; Tan, J.; Kroodsma, R.; Berg, W.; Kidd, C.; Peters Lidard, C. Evaluation of V05 precipitation estimates from GPM constellation radiometers using KuPR as the reference. J. Hydrometeorol. 2020, 21, 705–728. [Google Scholar] [CrossRef]
- Kidd, C.; Tan, J.; Kirstetter, P.-E.; Petersen, W.A. Validation of the Version 05 Level 2 precipitation products from the GPM Core Observatory and constellation satellite sensors. Q. J. R. Meteorol. Soc. 2018, 144, 313–328. [Google Scholar] [CrossRef] [Green Version]
- Sui, X.; Li, Z.; Ma, Z.; Xu, J.; Zhu, S.; Liu, H. Ground Validation and Error Sources Identification for GPM IMERG Product over the Southeast Coastal Regions of China. Remote Sens. 2020, 12, 4154. [Google Scholar] [CrossRef]
- Bennartz, R.; Bauer, P. Sensitivity of microwave radiances at 85–183 GHz to precipitating ice particles. Radio Sci. 2003, 38, 8075. [Google Scholar] [CrossRef]
- You, Y.; Wang, N.-Y.; Ferraro, R.; Rudlosky, R. Quantifying the snowfall detection performance of the GPM Microwave Imager channels over land. J. Hydrometeorol. 2017, 18, 729–751. [Google Scholar] [CrossRef]
- Wang, J.; Fisher, B.L.; Wolff, D.B. Estimating rain rates from tipping-bucket rain gauge measurements. J. Atmos. Ocean. Technol. 2008, 25, 43–56. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Month/Day |
|---|---|
| 2014 | 04/29–04/30 |
| 2015 | 07/12, 07/30 |
| 2016 | 02/29–03/09, 05/19–06/17, 10/28–10/31, 11/05–11/08 |
| 2017 | 05/24–05/25, 06/16, 07/05–07/10, 08/04–08/06, 09/25, 11/06, 11/23–11/30 |
| 2018 | 01/12, 06/25, 06/30 |
| Index | Sensor Acronym | Sensor Name | Sensor Type | Satellite |
|---|---|---|---|---|
| 1 | TMI | TRMM Microwave Imager | Imager | TRMM |
| 3 | AMSR2 | Advanced Microwave Scanning Radiometer Version 2 | Imager | GCOM-W1 |
| 5 | SSMIS | Special Sensor Microwave Imager/Sounder | Imager | DMSP-F16-19 |
| 9 | GMI | GPM Microwave Imager | Imager | GPM |
| 7 | MHS | Microwave Humidity Sounder | Sounder | NOAA-18,19; MetOp-A, B |
| 11 | ATMS | Advanced Technology Microwave Sounder | Sounder | Suomi-NPP |
| 20 | SAPHIR | Sounder for Atmospheric Profiling of Humidity in the Intertropics by Radiometry | Sounder | MeghaTropiques |
| Ancillary Variable | Description |
|---|---|
| precipitationUncal | Multi-satellite precipitation estimate without gauge calibration. |
| HQprecipSource | PMW sensor identifier |
| IRkalmanFilterweight | IR-only precipitation weight (%) in the final precipitation estimate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Wolff, D.B.; Tan, J.; Marks, D.A.; Pippitt, J.L.; Huffman, G.J. Validation of IMERG Oceanic Precipitation over Kwajalein. Remote Sens. 2022, 14, 3753. https://doi.org/10.3390/rs14153753
Wang J, Wolff DB, Tan J, Marks DA, Pippitt JL, Huffman GJ. Validation of IMERG Oceanic Precipitation over Kwajalein. Remote Sensing. 2022; 14(15):3753. https://doi.org/10.3390/rs14153753
Chicago/Turabian StyleWang, Jianxin, David B. Wolff, Jackson Tan, David A. Marks, Jason L. Pippitt, and George J. Huffman. 2022. "Validation of IMERG Oceanic Precipitation over Kwajalein" Remote Sensing 14, no. 15: 3753. https://doi.org/10.3390/rs14153753