2.1. Current Monitoring Methods
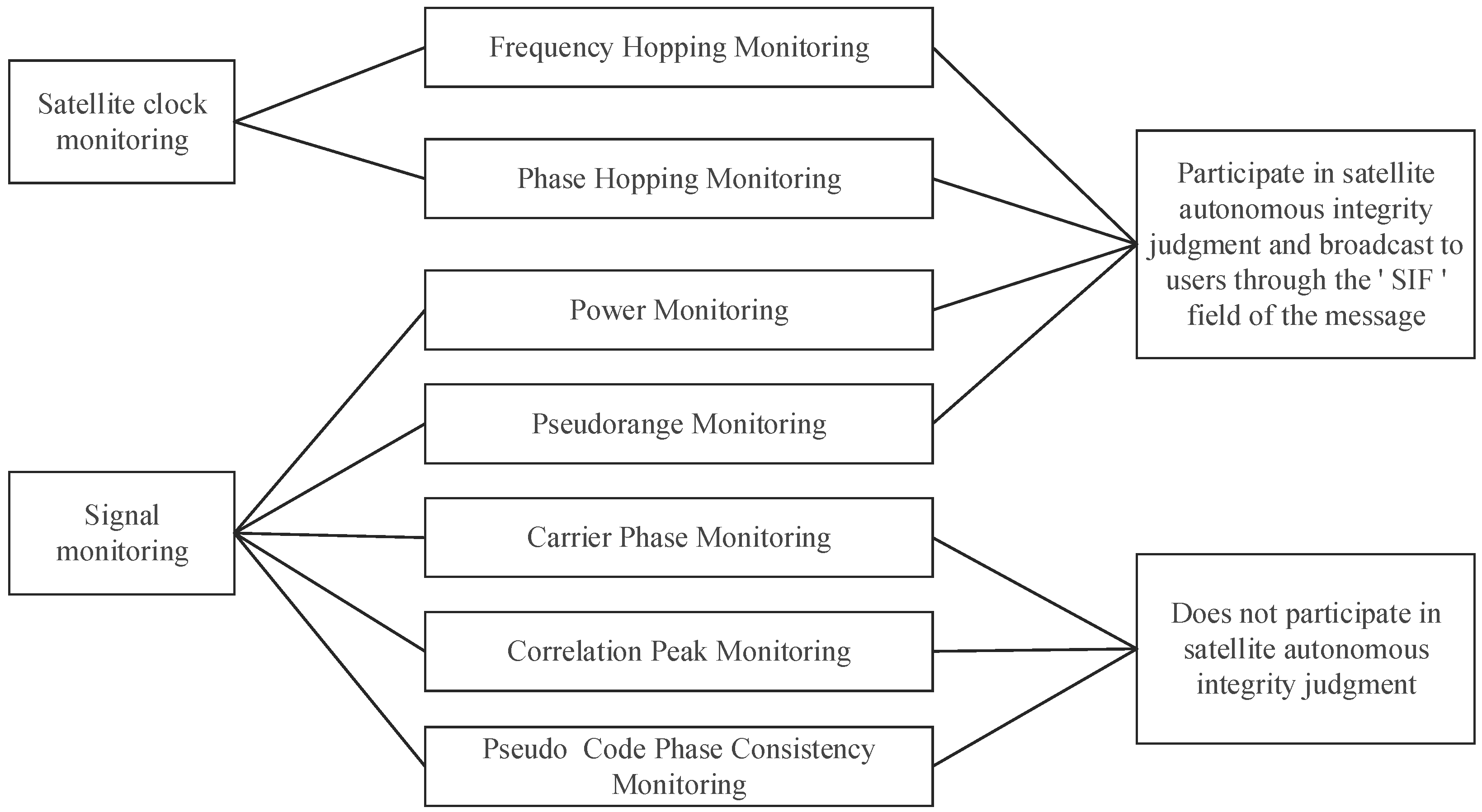
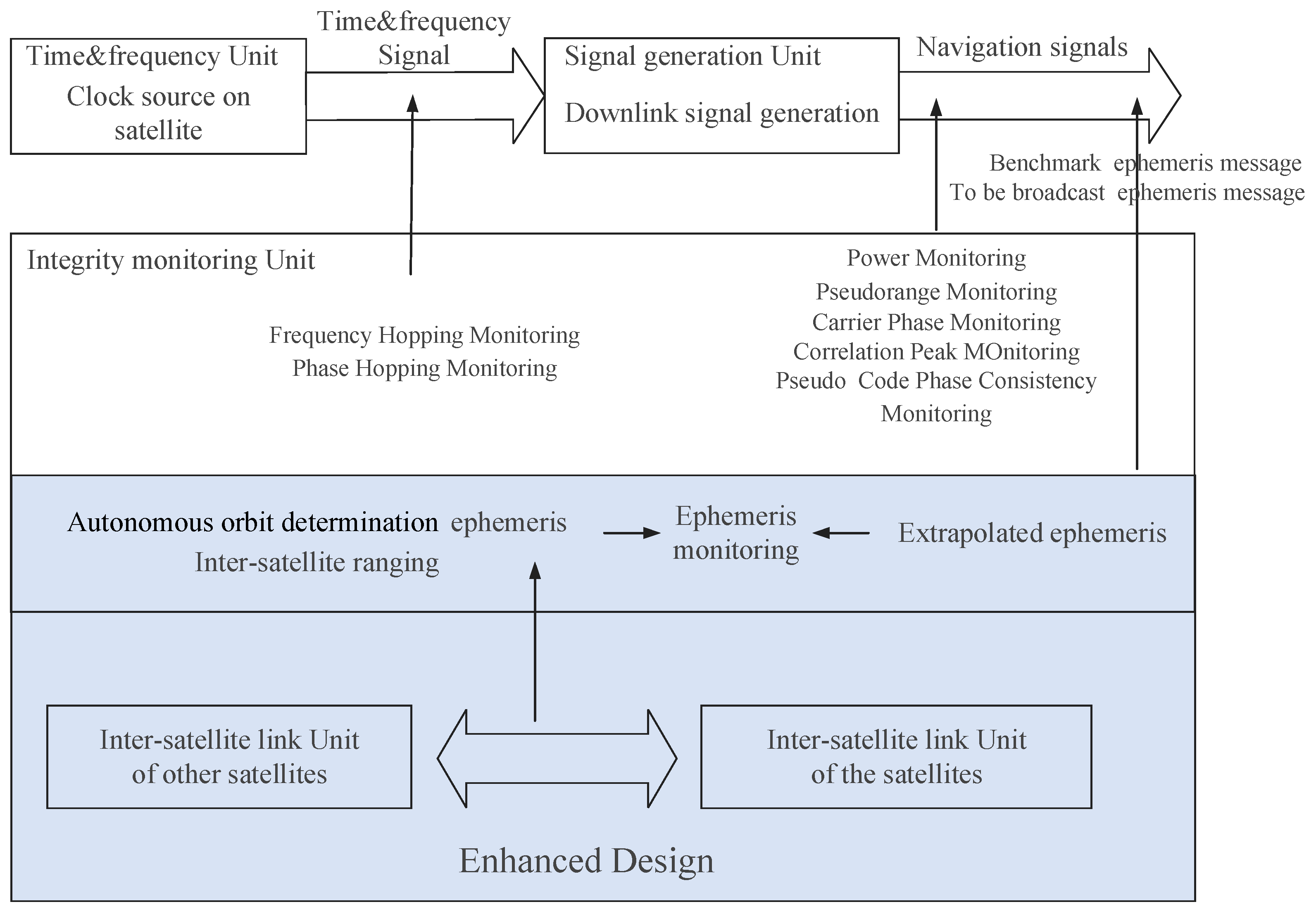
BDS-3 SAIM monitors the health status of navigation signals and satellite clocks by continuously monitoring its own broadcast signals from navigation satellites. SAIM includes downlink navigation signal quality monitoring and time-frequency stability monitoring. Among these, downlink navigation signal quality monitoring involves monitoring of the signal power, the pseudo-range, code phase consistency and the correlation value. Time-frequency stability monitoring involves monitoring of the frequency hopping and phase hopping of the satellite’s atomic clocks. Finally, the integrity information of the navigation signal is generated by integrating the monitoring information of the satellite’s atomic clock and navigation signal [
7].
The downlink navigation signal quality monitoring function of SAIM is to identify the abnormal situation of the carrier to noise density of the user receiver caused by the decrease of the navigation signal power through power monitoring; through pseudo-range monitoring, identify the abnormal jump of the pseudo-range observed by the user. Moreover, due to the different paths used for generating the frequency signal of the pseudo-range and carrier phase on the satellite, if any path produces an anomaly, the pseudo-range and carrier phase will be inconsistent, which would affect the high-precision positioning of users. Therefore, such anomalies can be identified by monitoring the code phase consistency. Correlation peak monitoring [
18] uses three pairs of narrow correlators to obtain three pairs of correlation values, monitor the symmetry of the signal correlation peak and realize the monitoring of the signal’s pseudo-range deviation. At present, the code phase consistency monitoring and correlation peak monitoring algorithms are still in the on-orbit test phase and have not yet actually been involved in monitoring the integrity of the system. The time-frequency stability monitoring function of SAIM monitors the stability of the satellite’s atomic clock by monitoring the frequency and phase jump of the satellite clock.
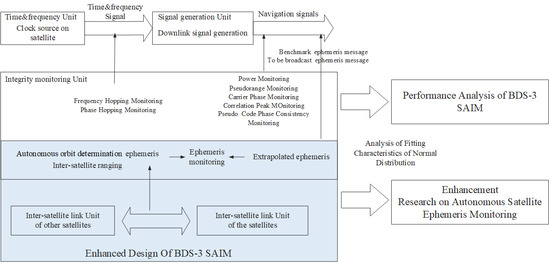
Due to the absence of propagation and environmental errors and noise, SAIM monitoring data usually fluctuate around a certain mean. If the navigation signal is abnormal, resulting in an abnormal jump in some monitoring data that exceeds the alarm threshold, SAIM will issue an alarm for that navigation signal. SAIM alarm modes consist of the message integrity alarm mode and the non-standard code integrity alarm mode. In the message integrity alarm mode, if SAIM detects an anomaly, the satellite will set the signal integrity flag (‘SIF’) parameter in the signal navigation telegram as ‘1’ independently. After rectification of the anomaly has been confirmed by the ground system, the ‘SIF’ parameter will be reset to ‘0’. In non-standard code alarm mode, if SAIM detects an anomaly, the satellite will independently switch the spread spectrum code of the signal to the non-standard code, so that the user cannot receive the navigation signal. The current SAIM used on BDS-3 satellites is show in
Figure 1.
2.1.1. Signal Power Monitoring
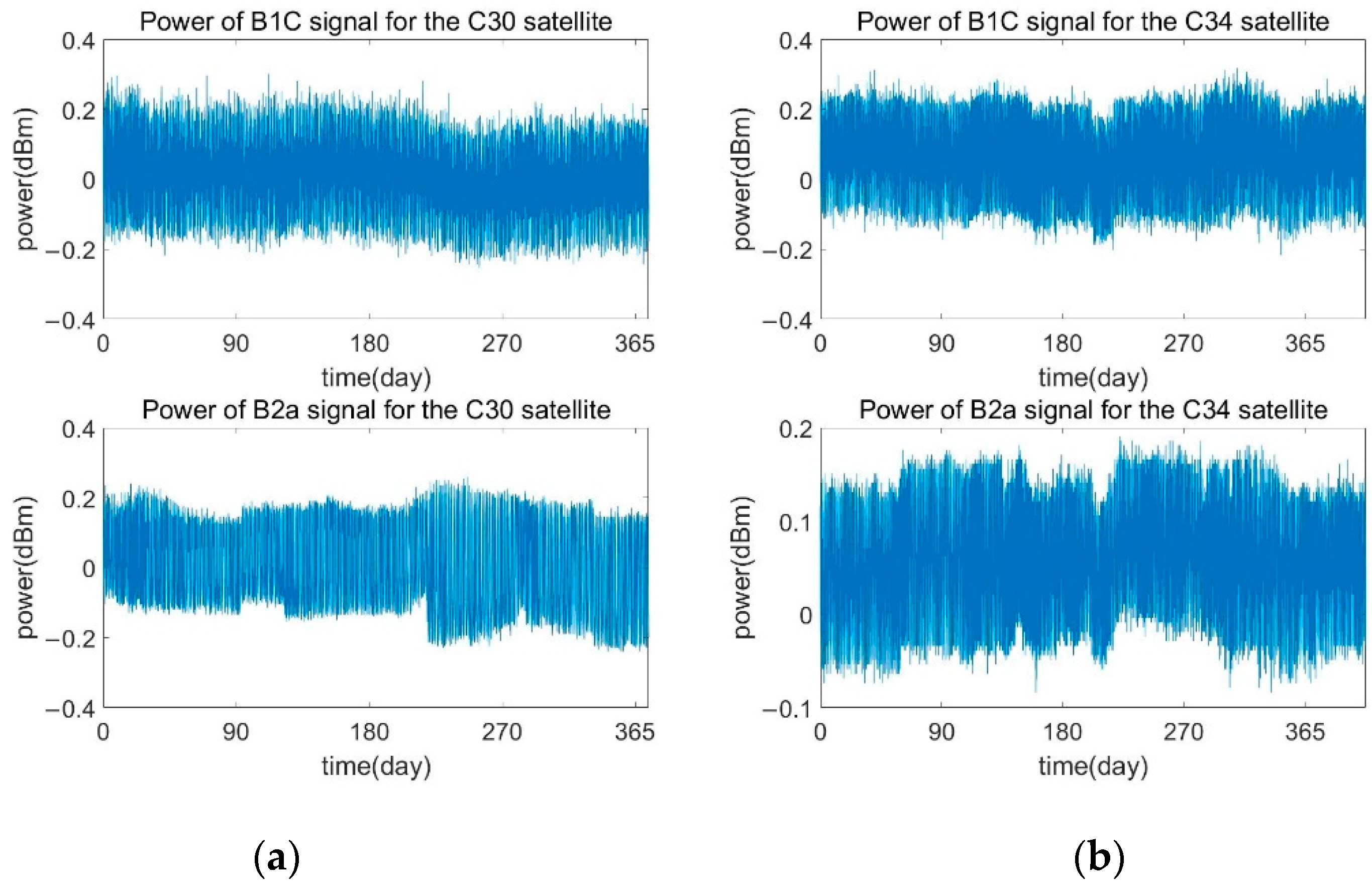
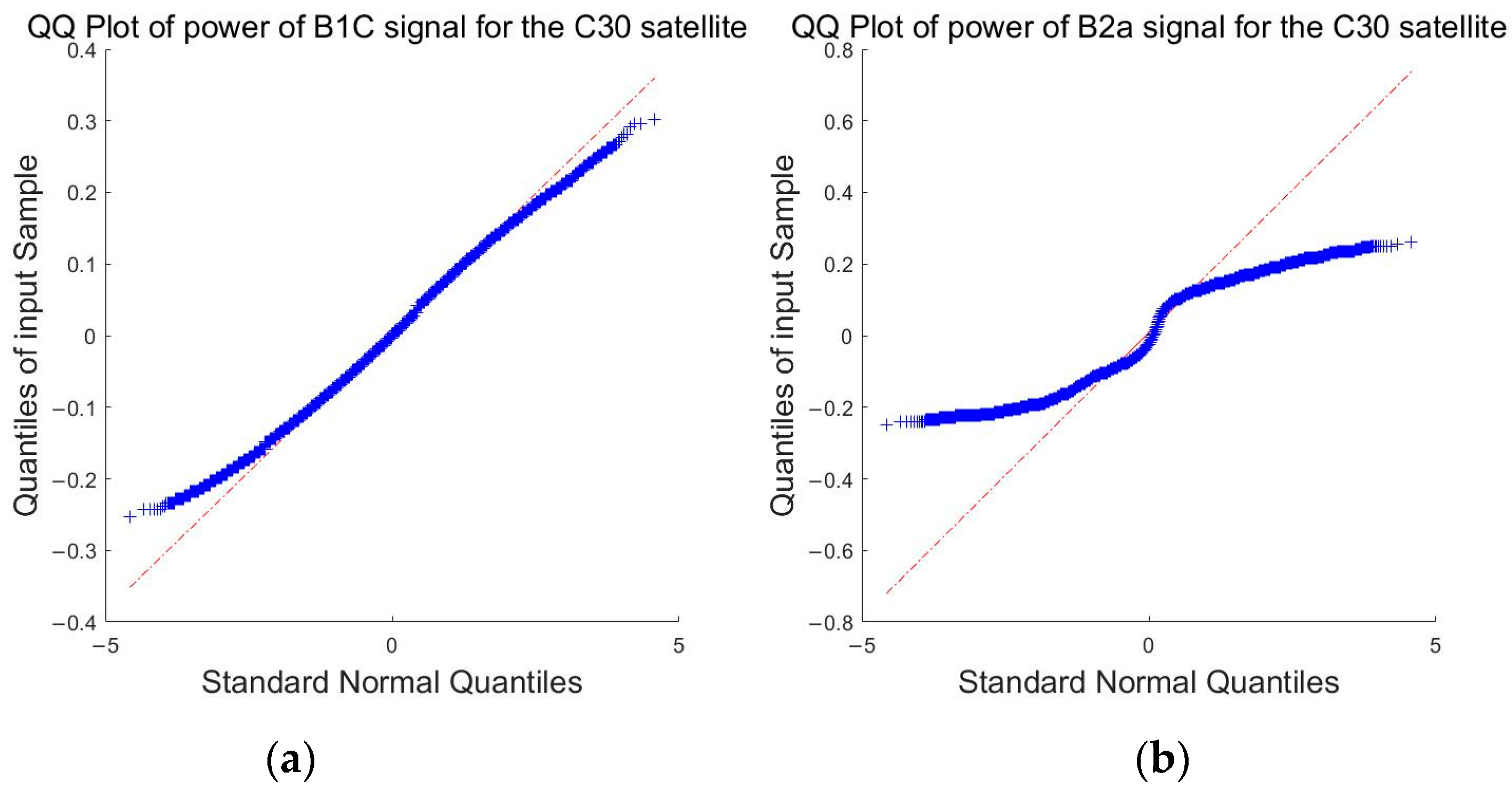
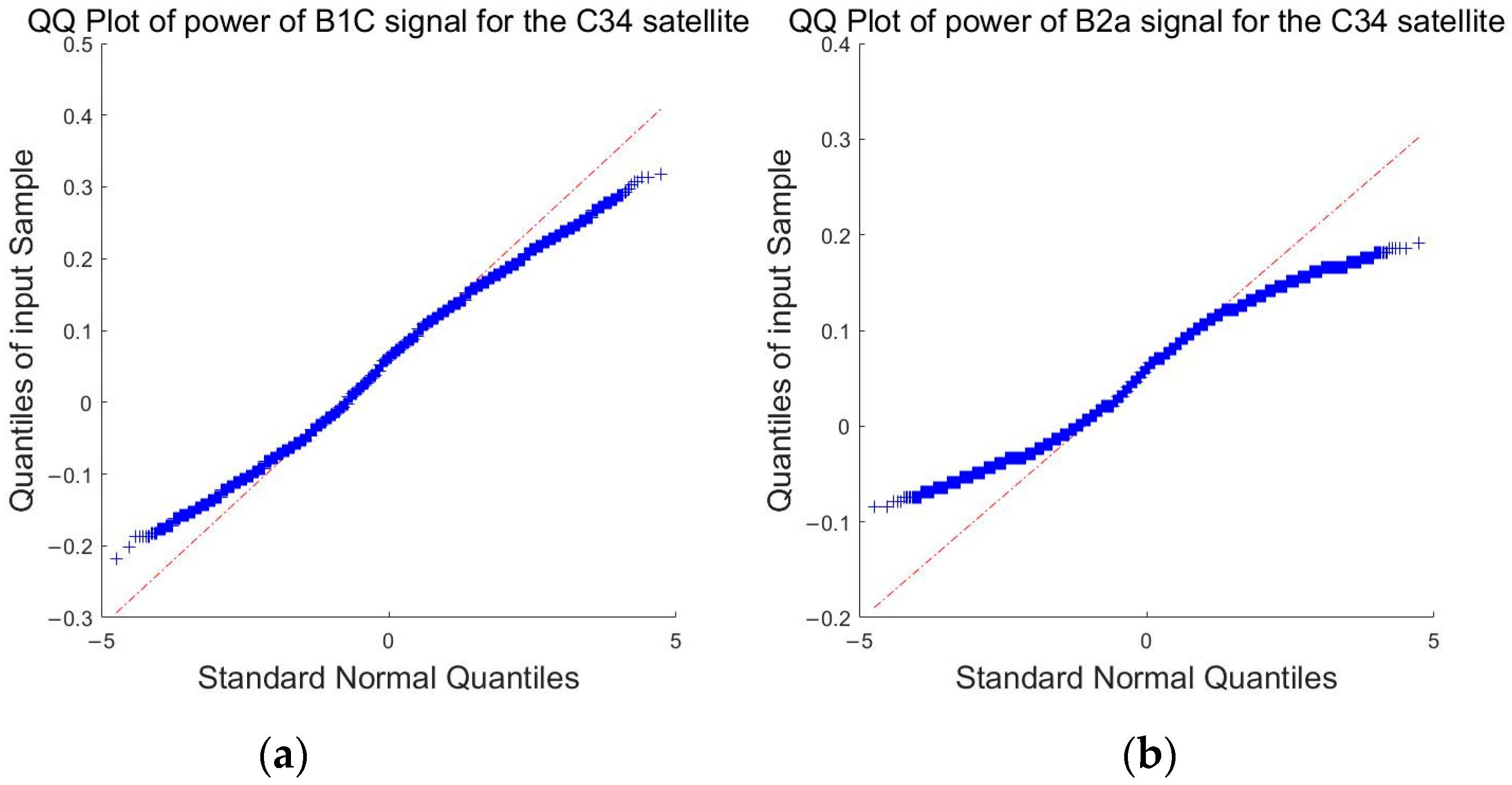
In the front of the downlink navigation transmitting antenna of the navigation satellite, the low power signal is obtained by coupling as the input signal of the SAIM function unit. Based on the power monitoring information collected by the signal processing module, the navigation signal’s quality is monitored and evaluated by the power of the satellite’s signal. Normally, the signal power monitored for a satellite should fluctuate within a certain range around the mean value. Once the navigation signal’s power drops beyond the alarm threshold, SAIM will issue an alarm. The SAIM alarm threshold usually has an initial empirical value. Under normal signal conditions, the on-orbit signal power monitoring data should have high stability.
2.1.2. Pseudo-Range Monitoring
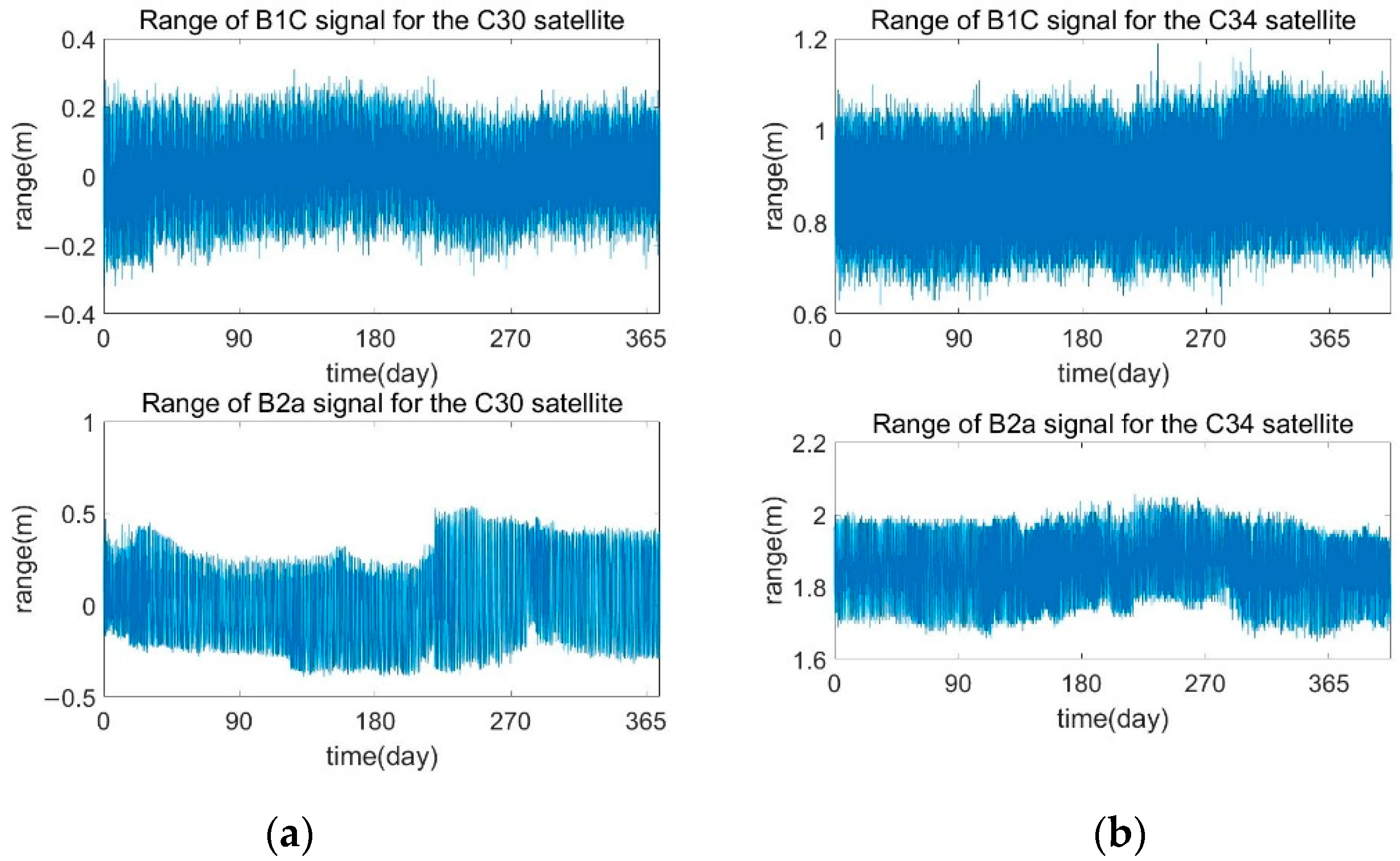
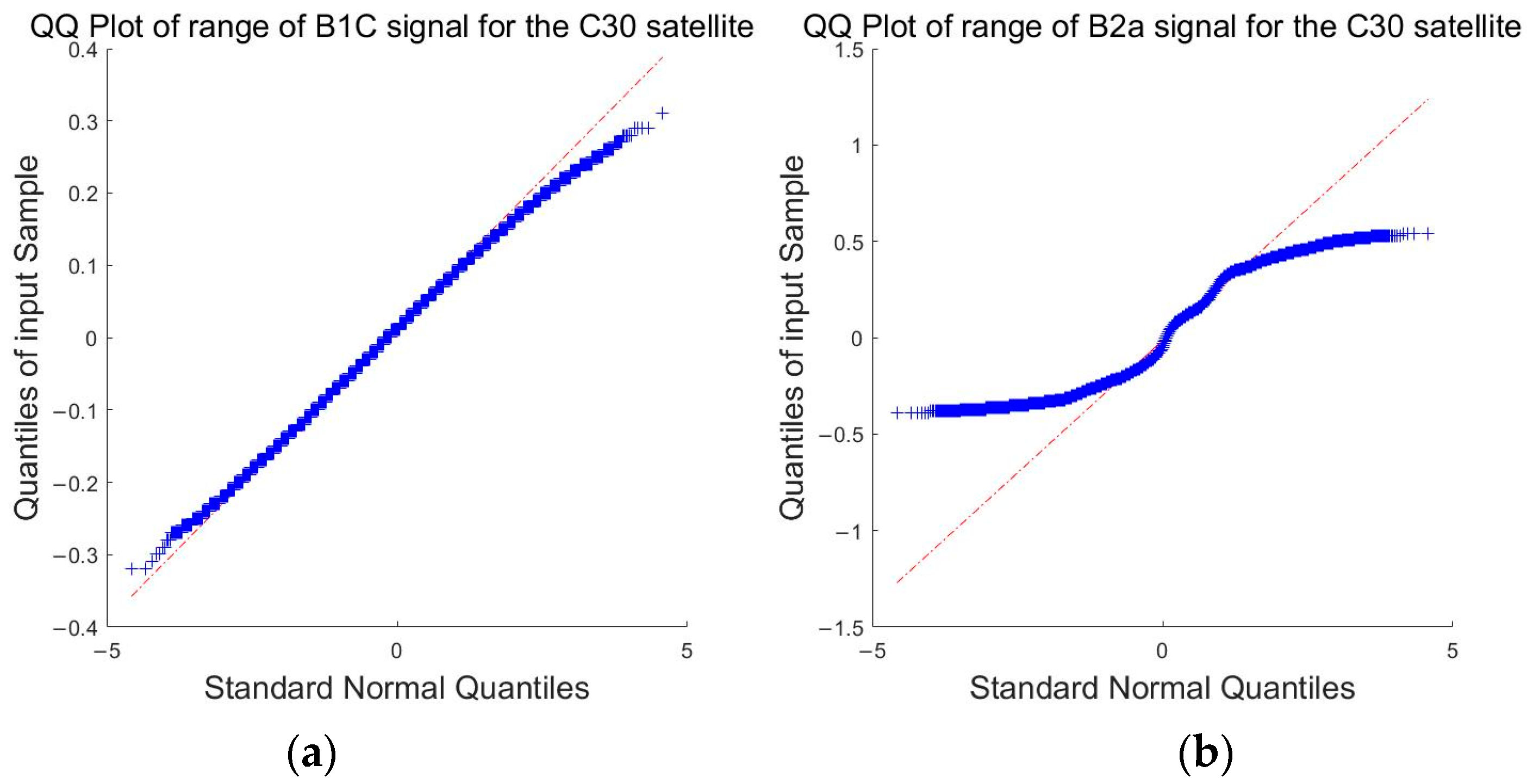
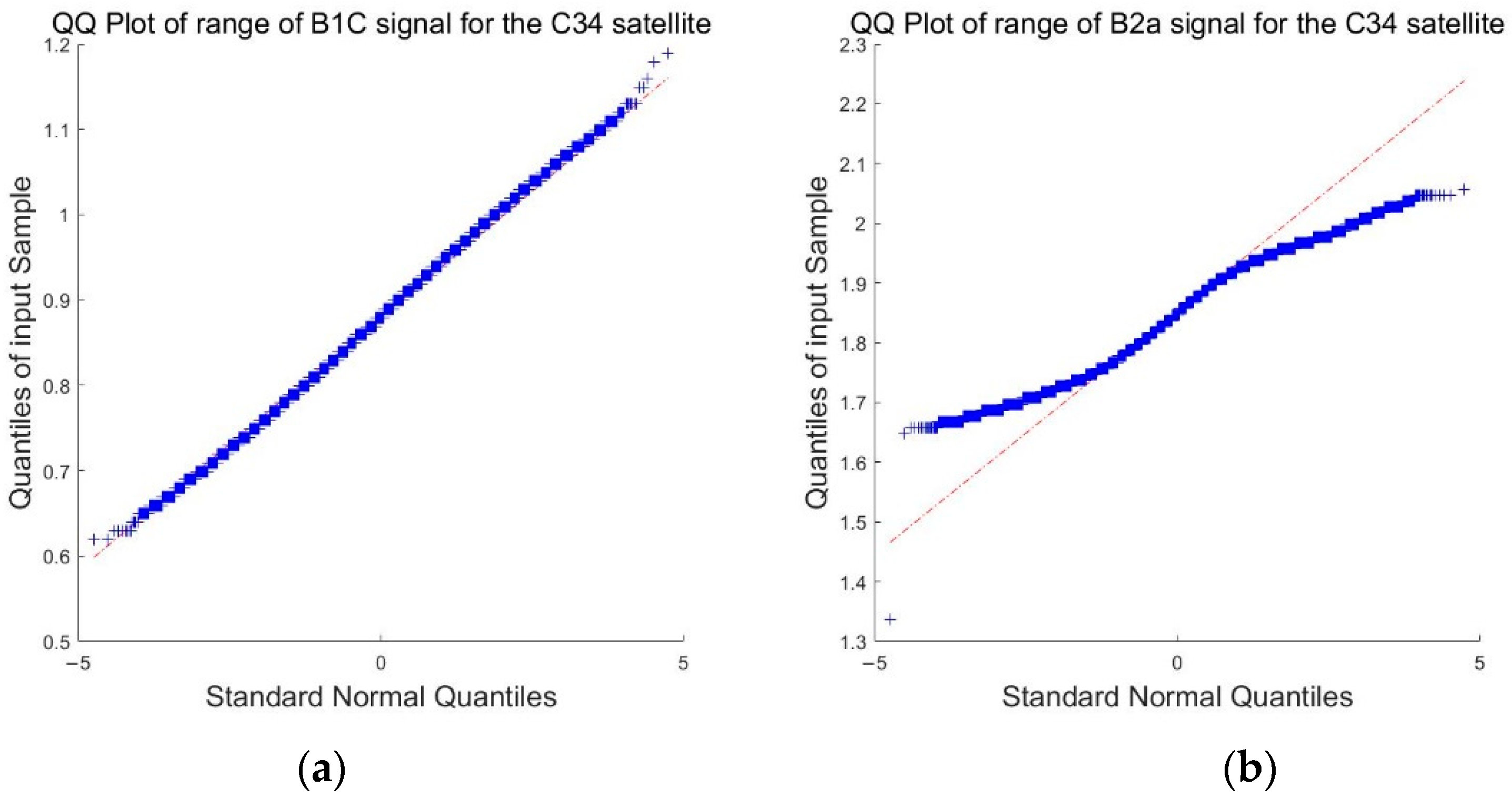
Satellite load anomalies may cause abnormal jumps in the pseudo-range measurements received by the user receiver. Since the monitoring unit can adopt different frequency sources for the satellite’s atomic clock, the pseudo-range measurement value of the satellite’s autonomous monitoring usually has a linear drift. By increasing the corresponding linear compensation, the pseudo-range measurement value of the satellite’s autonomous monitoring can fluctuate within a certain range around the mean value. If an abnormal jump is found in the pseudo-range of a certain navigation signal and exceeds the alarm threshold, the alarm information of the signal is given.
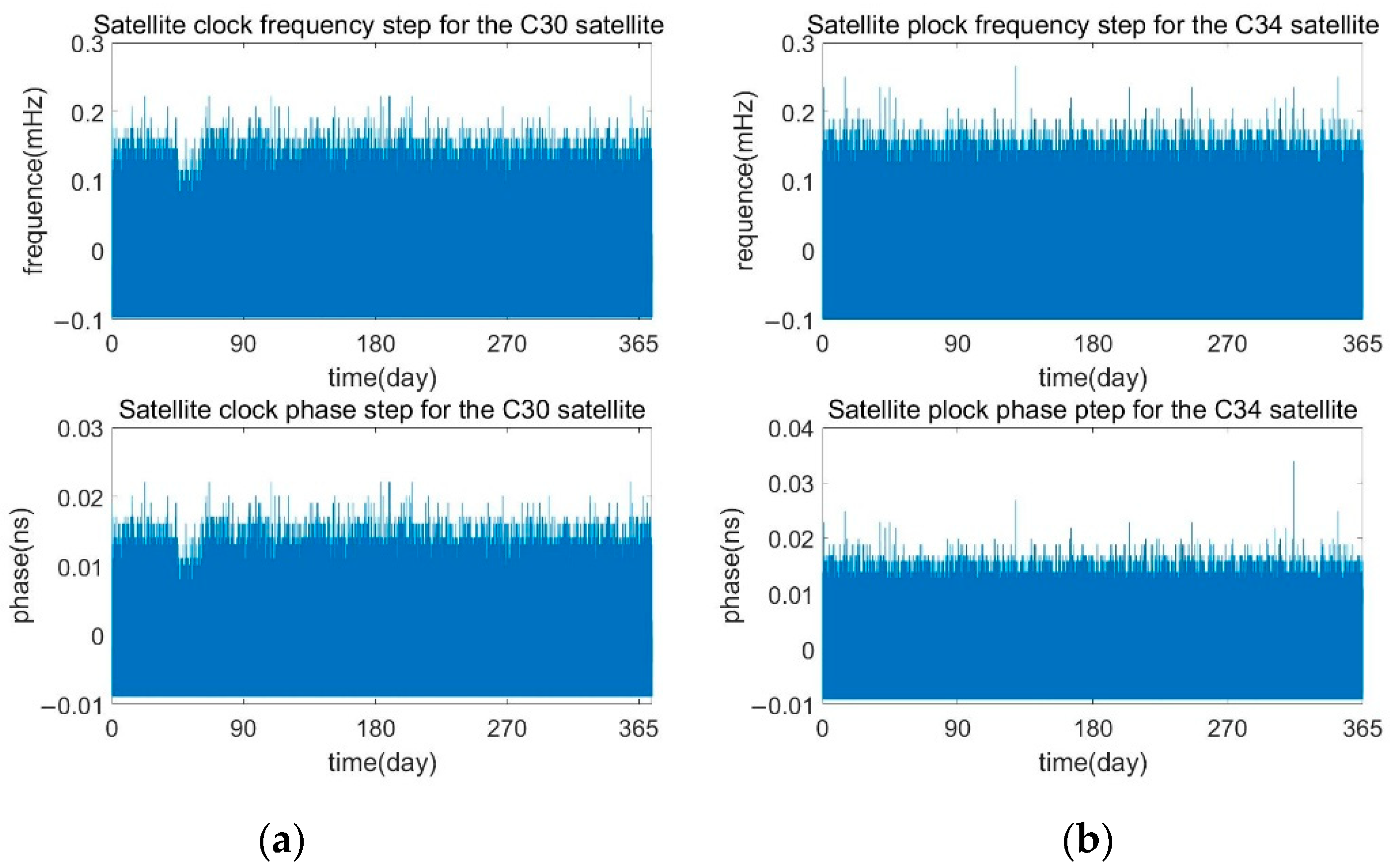
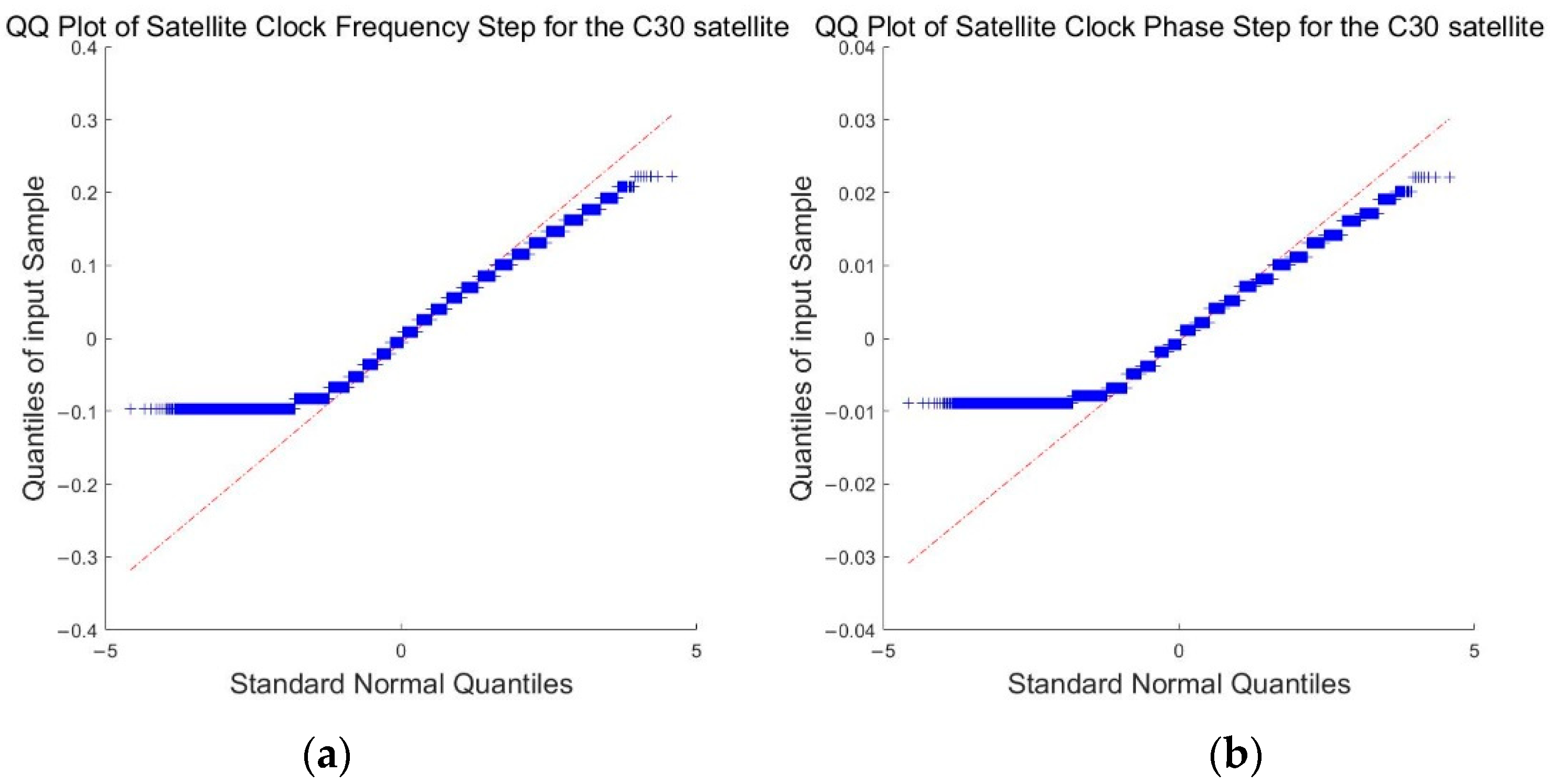
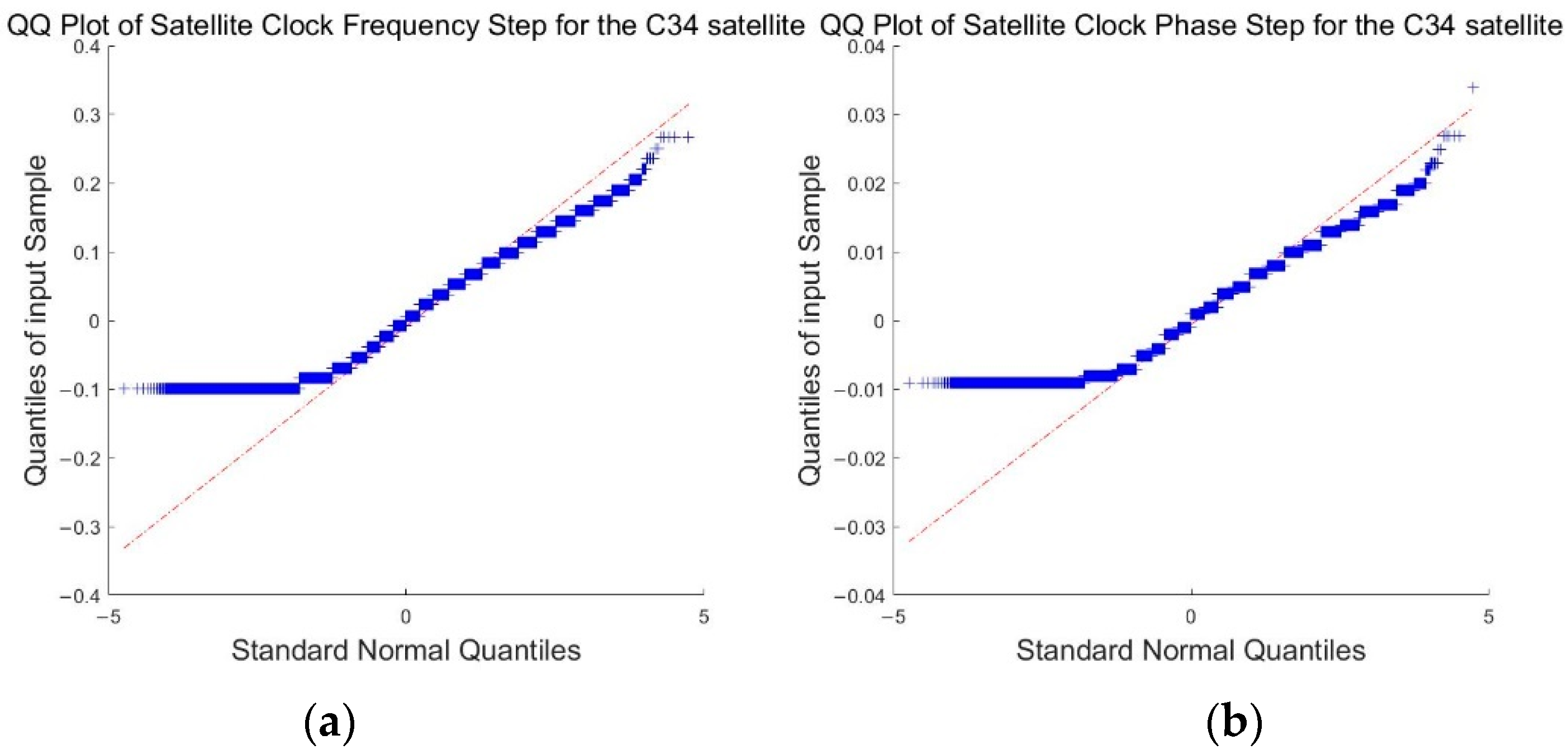
2.1.3. Satellite Clock Frequency and Phase Hopping Monitoring
The autonomous monitoring of the frequency hopping and phase hopping of the satellite clock is realized by a loop phase tracking system, which adjusts the frequency and phase of the local signal through negative feedback to track the reference signal. The phase shift introduced by the difference in frequency between the satellite clock and the local reference crystal oscillator can be eliminated by the secondary difference of the measured value of the adjacent epoch clock difference, and the phase hopping of the satellite clock can thus be monitored. The satellite clock frequency hopping can be derived from the phase hopping. If either the satellite clock phase or the frequency hopping exceeds the preset alarm threshold, SAIM will issue an alarm.
2.2. Enhanced Ephemeris Monitoring Methods
Until now, BDS-3 SAIM has not been able to monitor ephemeris anomalies in broadcast messages. The ephemeris anomaly monitoring scheme presented below can effectively fill this gap and further strengthen the on-orbit autonomous monitoring capability of BDS-3.
The generation, update and broadcast mode of the navigation ephemeris message is as follows: the ground operation management center collects the observation data of the navigation satellite’s downlink signal, processes the data uniformly, determines the satellite’s orbit and calculates the clock error. Next, the long-term navigation ephemeris is injected into the whole network satellite at a fixed time per hour for a period of time in the future. When the satellite needs to broadcast the navigation message, it retrieves the reference time of each group of navigation messages according to the current time, and a combination of the closest reference time and the current time is selected to send to the signal’s downlink broadcast module to broadcast to the ground. Since there is little difference between the preceding and the following hour ephemeris, the current hour can be used to check the next hour.
The ephemeris of a satellite is composed of 18 quasi-Kepler orbital parameters and the ephemeris data age, with a total of 454 bits in each group. The format of the ephemeris is the same as that of the uplink injection at the ground station. The ephemeris mainly includes: issue of data ephemeris, the ephemeris reference time, the orbit type of satellite, the deviation of the semi-major axis contrast to the reference value, the semi-major axis change rate, the difference between the average speed of the satellite and the calculated value, the rate of change of the difference between the average speed of the satellite and the calculated value, mean anomaly at the reference time, the eccentric rate e, the amplitude of the near-earth point, the reference longitude of the ascending anode, the orbital inclination at the reference time, the variable quantity of the ascending node’s right ascension rate of change, the change rate of orbital inclination and orbit inclination, the radius, and the latitude amplitude angle of the sine, cosine harmonic correction term, etc.
It is meaningless to make a simple threshold judgment for each separate parameter of an ephemeris message. The latest array of ephemeris messages should be transformed to obtain a set of one-dimensional results. According to the distribution characteristics of the parameter pairs and the safety requirements of engineering monitoring, a reasonable error threshold is set to judge the rationality of the ephemeris message parameters.
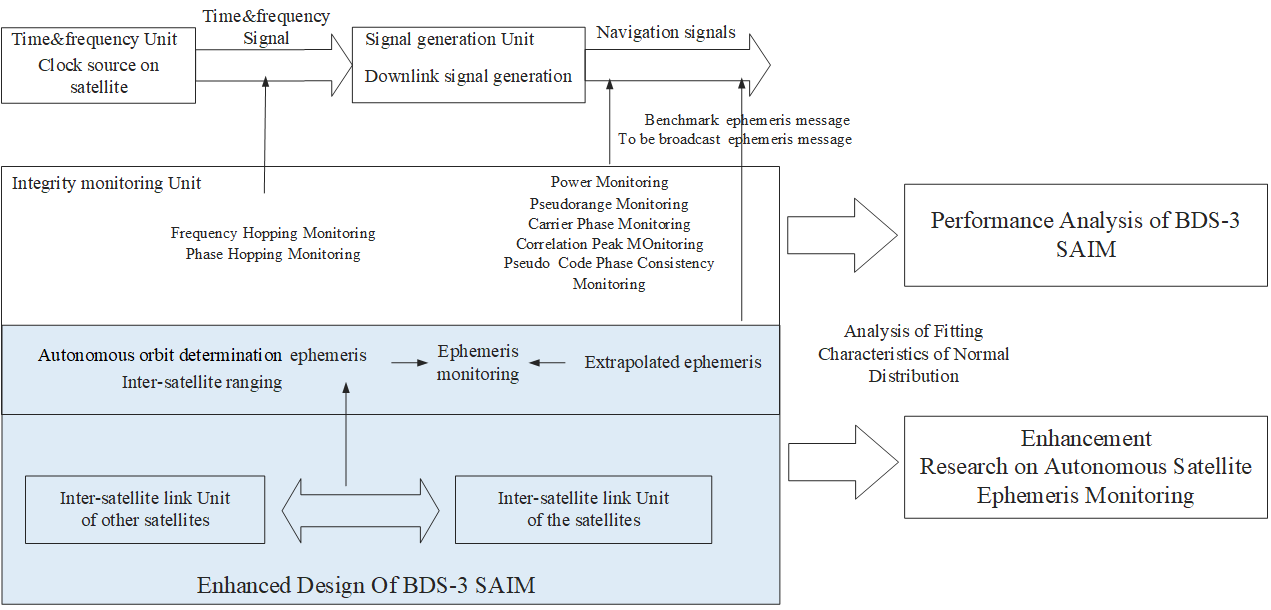
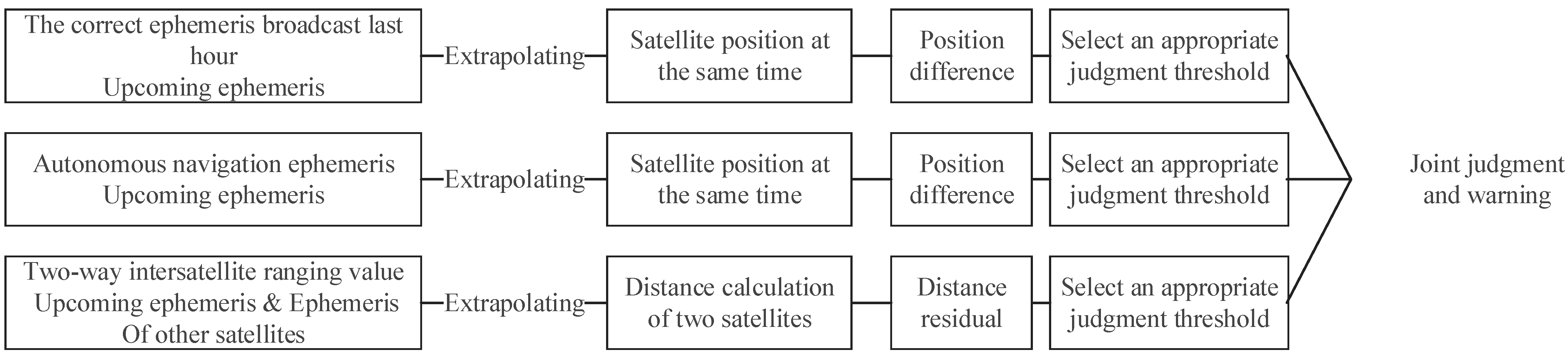
In order to realize autonomous integrity monitoring of ephemeris, we propose a SAIM enhancement design, which consists of three relatively independent methods. In essence, no matter which method, an additional reference benchmark is needed to compare with the ephemeris received by the satellite at the current time in order to achieve the monitoring of ephemeris. If the difference exceeds the alarm threshold, an alarm would be output. The reference data of the three methods are respectively: (1) the ephemeris extrapolated from the previous cycle; (2) the ephemeris generated by autonomous orbit determination; (3) inter-satellite link distance measurement data. The specific comparison process is shown in
Figure 2.
Figure 3 shows the new SAIM design with additional ephemeris message integrity monitoring. In order to reduce the false alarm probability of ephemeris integrity messages, it is necessary to use a combination of monitoring methods to produce an alarm. SAIM will send an alarm only when the monitoring results of at least two of these monitoring methods exceed the alarm threshold, and the satellite will set the “SIF” parameter in the broadcast ephemeris from “0” to “1” to ensure that the alarm messages are broadcast to the users.
2.2.1. Extrapolated Ephemeris
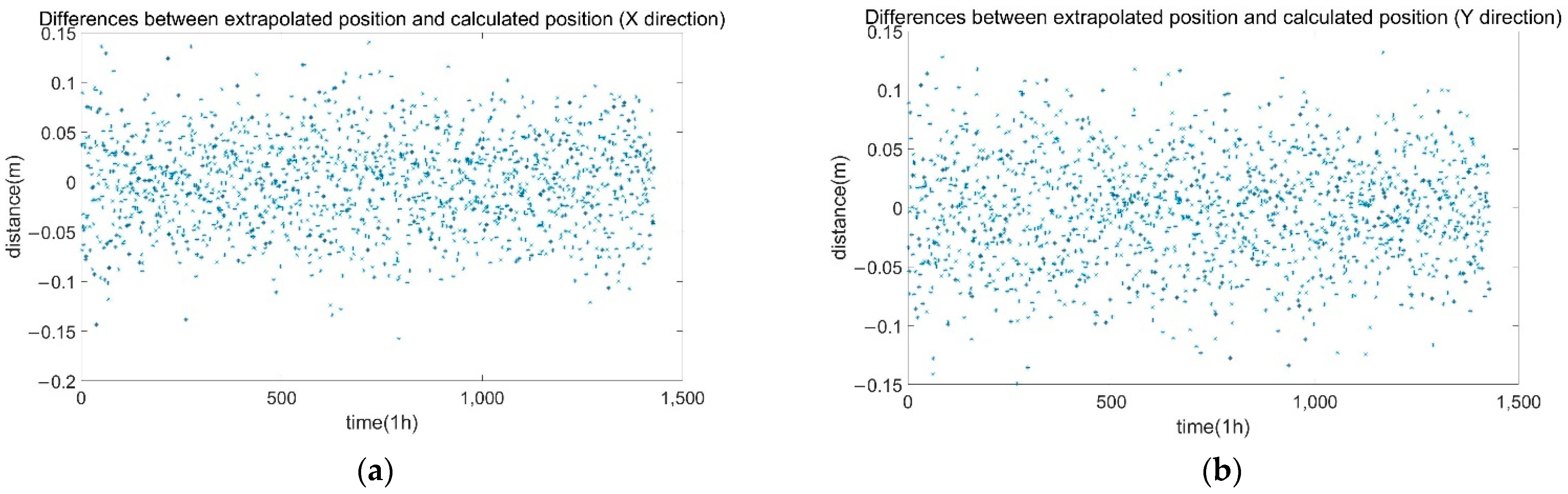
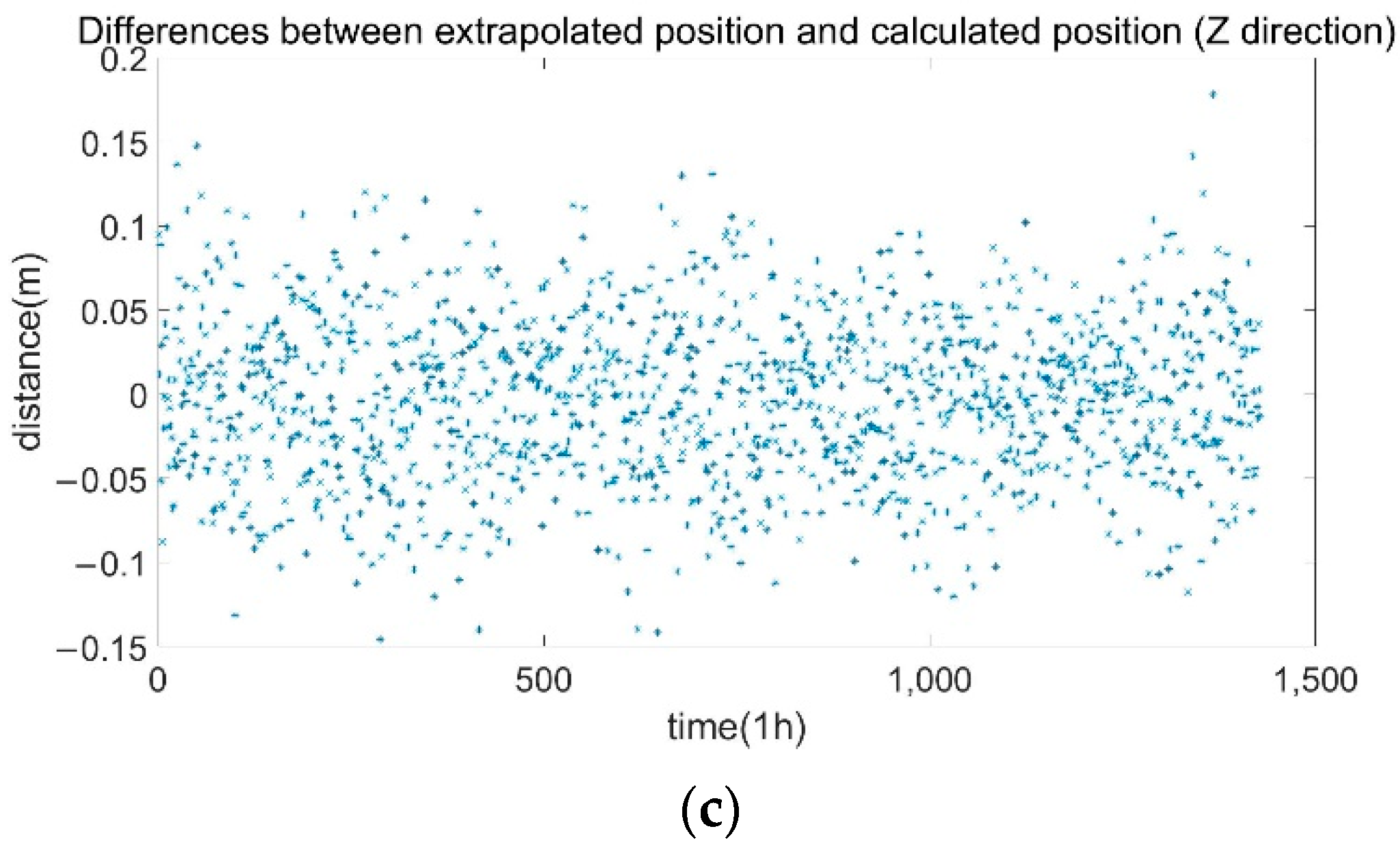
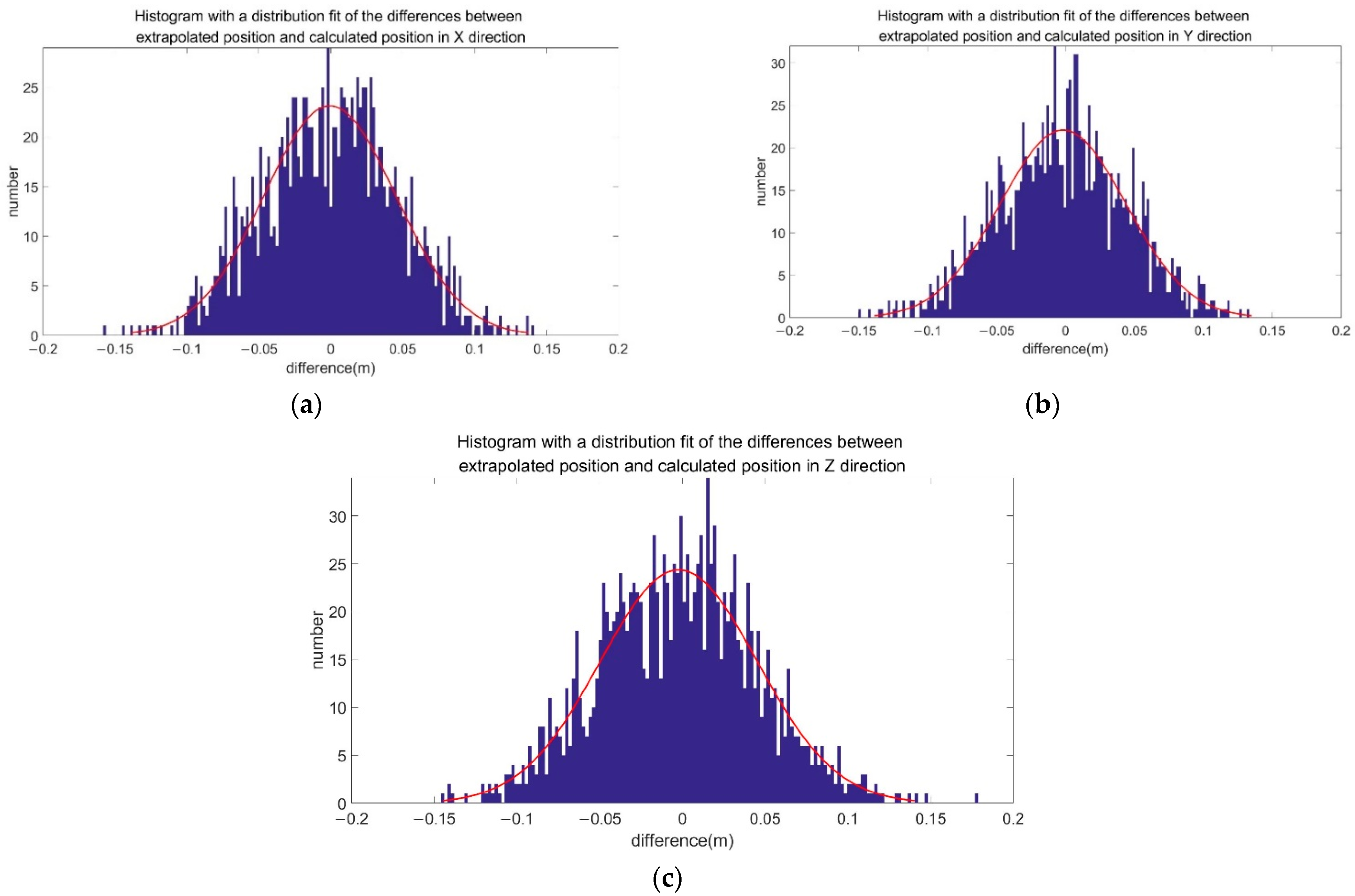
In BDS-3, the ground control system injects the broadcast ephemeris to the satellite once every hour. After receiving the latest broadcast ephemeris, the satellite can use the navigation ephemeris message posted from the ground station in the previous hour to calculate the position predicted by the two groups of ephemeris messages for the same time and to calculate the satellite’s position difference calculated from the two ephemerides. If the position difference exceeds the threshold, an alarm will be given through SAIM to monitor the orbit of the navigation message and prevent the wrong ephemeris from being received by the users, even when the satellite receives the wrong ephemeris. The method of extrapolating satellite position using ephemeris can refer to BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal B1C (Version 1.0) [
20].
Usually, the forecast error of the satellite’s broadcast ephemeris for 1 h is at the decimeter level, which can be used as a reference for monitoring the newly posted broadcast ephemeris. The monitoring method is simple, effective and reliable.
2.2.2. Autonomous Orbit Determination Ephemeris
The Beidou-3 satellite is equipped with an autonomous orbit determination function unit, which has the ability to operate independently and generate ephemeris independently, and run in parallel with the navigation signal generation unit. Among them, the autonomous orbit determination function unit mainly relies on the inter-satellite link to generate ephemeris information, and the navigation signal generation unit mainly relies on the ground annotation to generate ephemeris information. Therefore, the ephemeris information generated by the two units is relatively independent and can be used as a comparison to monitor the correctness of the ephemeris to be broadcast.
According to the user’s algorithm of the downlink ephemeris (refer to BeiDou Navigation Satellite System Signal In Space Interface Control Document Open Service Signal B1C (Version 1.0) [
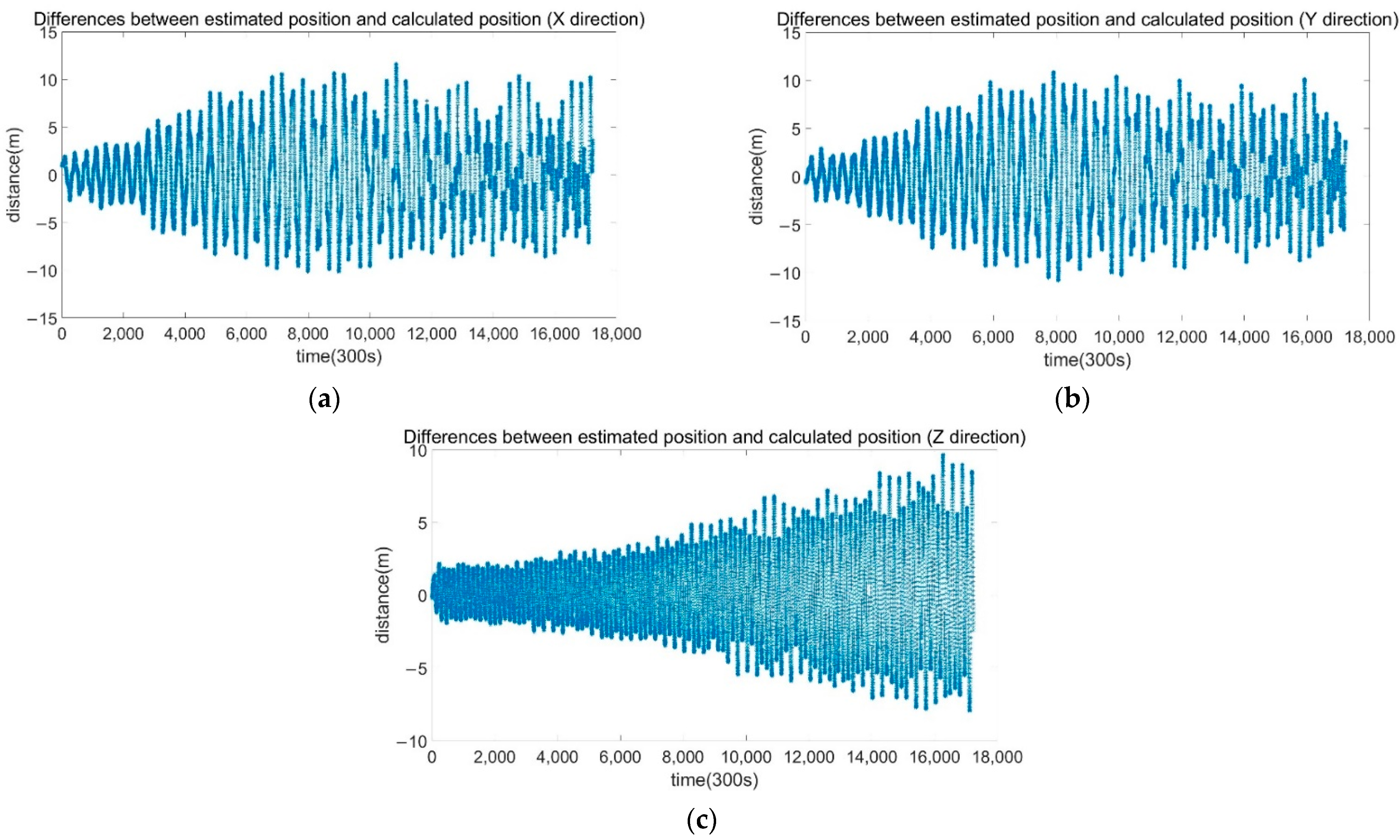
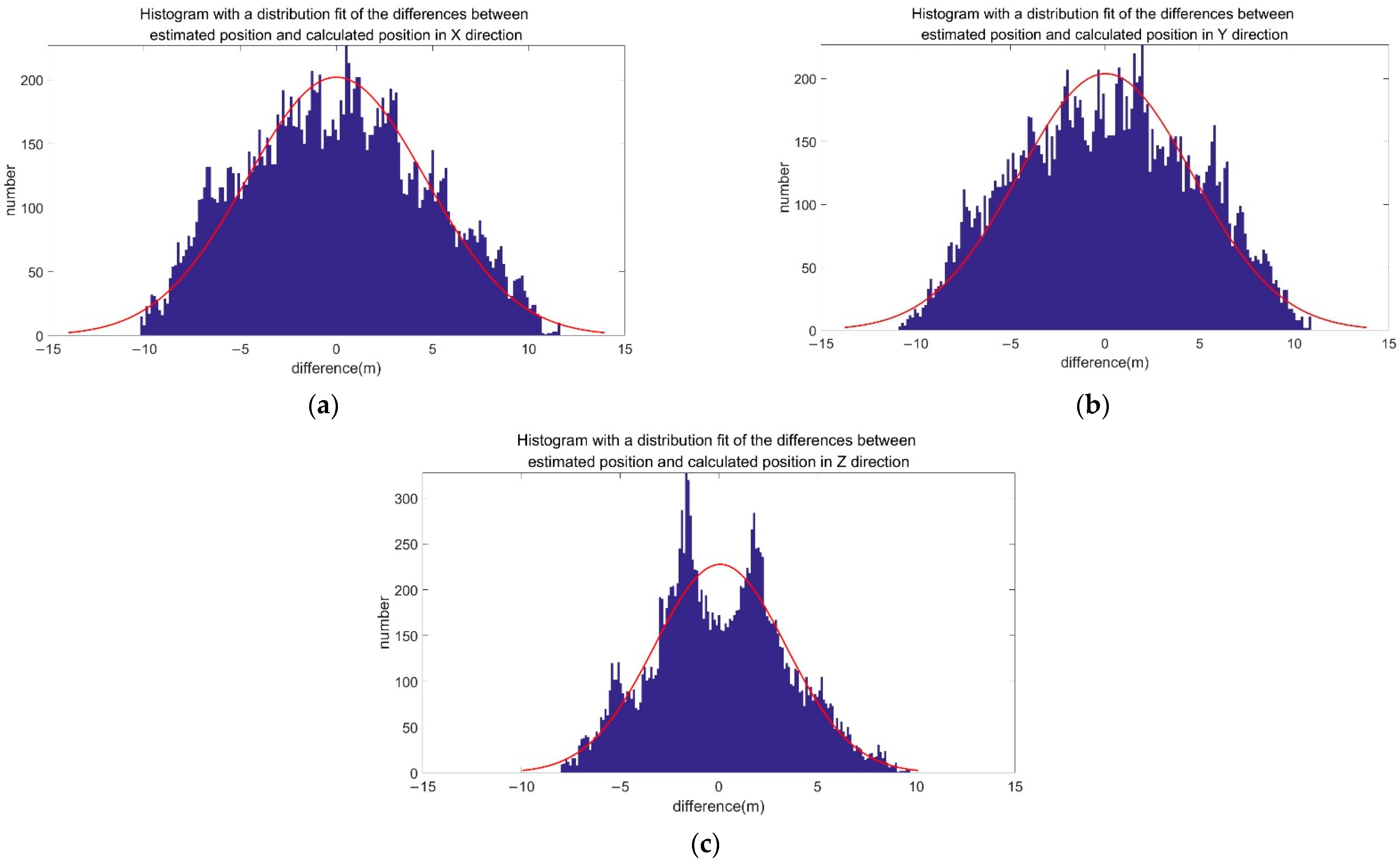
20] for the specific algorithm), we can calculate the position of the BDS-3 MEO satellite in the X, Y, and Z directions in the BeiDou coordinate system (BDCS), and compare the ephemeris message to be broadcast and the autonomous orbit determination message at the same time. The difference between the obtained positions is compared with the threshold to confirm the correctness of the ephemeris message to be broadcast in the next hour. If it is greater than the judgment threshold, an alarm will be issued.
The autonomous orbit determination message can be used to realize the monitoring of the ephemeris parameters when the satellite is in the on-orbit autonomous operation state, but the accuracy will be lower than that of using the uplink posted message, and with an extension of the running time of the autonomous operation state, the accuracy will be further reduced, which is expected to be in the order of 10 m.
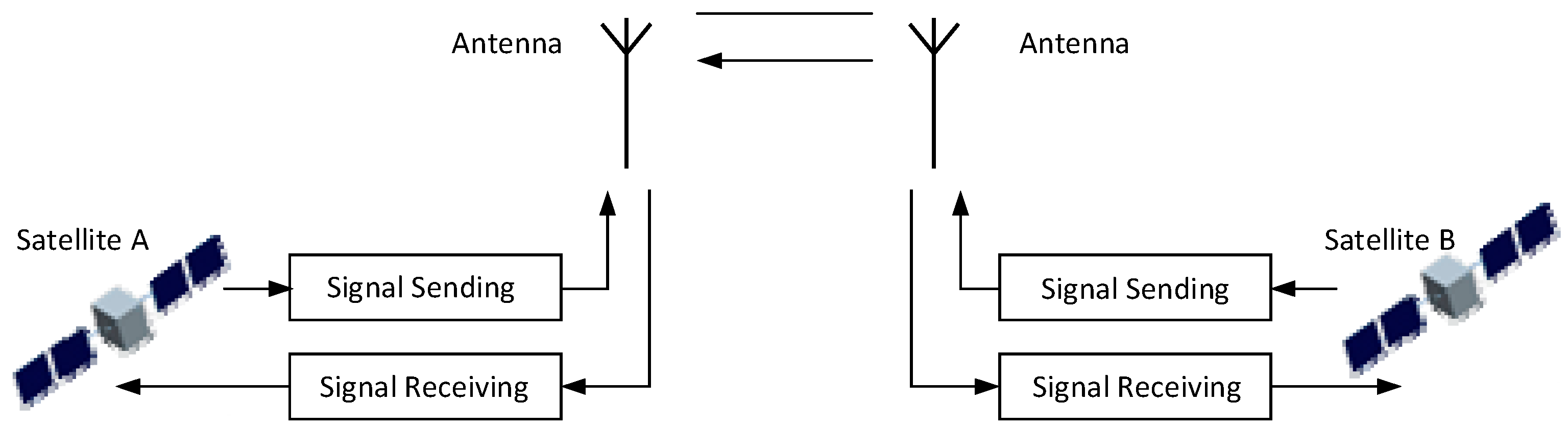
2.2.3. Inter-Satellite Ranging
The BDS-3 has inter-satellite link observation data, which can also be used as a reference for judging the integrity of ephemeris messages.
Figure 4 shows a schematic diagram of the two-way ranging of the inter-satellite link.
If we assume that
A is the satellite to be monitored, and there is an inter-satellite link ranging between
B and
A, the inter-satellite link ranging between
A and
B can be expressed as [
21]:
In the Formula (1), and are the different moments; is the satellite’s position vector; is the transmission delay for ranging; is the satellite clock; and are the delays of the transmitting and receiving equipment, respectively; is the combined error of the ranging observation error, the satellite orbit error and the satellite clock error.
To obtain the two-way distance observations, the one-way observations need to be reduced to the same moment, and the reduction equation is shown in the following formula:
where
and
represent the amount of reduction correction calculated from the observation time and the reduction time, which are related to the distance difference and the clock difference between the reduction time and the observation time;
and
are calculated by the following formula:
and can be calculated by the differences in the satellite forecast orbit and forecast clock parameters, and its calculation accuracy determines the reduction accuracy of the time-division system’s inter-satellite ranging data, which depend on the satellites’ forecast clock speed accuracy and speed forecast accuracy. A pair of satellites generally completes a two-way measurement within 3 s. Therefore, in the previous algorithm, the target time is reduced to a distance from the observation times and that is less than 3 s. At present, the BDS-3 satellite’s speed forecast error is about 0.1 mm/s and the forecast clock speed error is less than 1 × 10−13 s/s. The time interval for imputation is 3 s. Thus, it can be calculated that the reduction error of 3 s is less than 0.0003 ns, which is negligible for judging the ephemeris error.
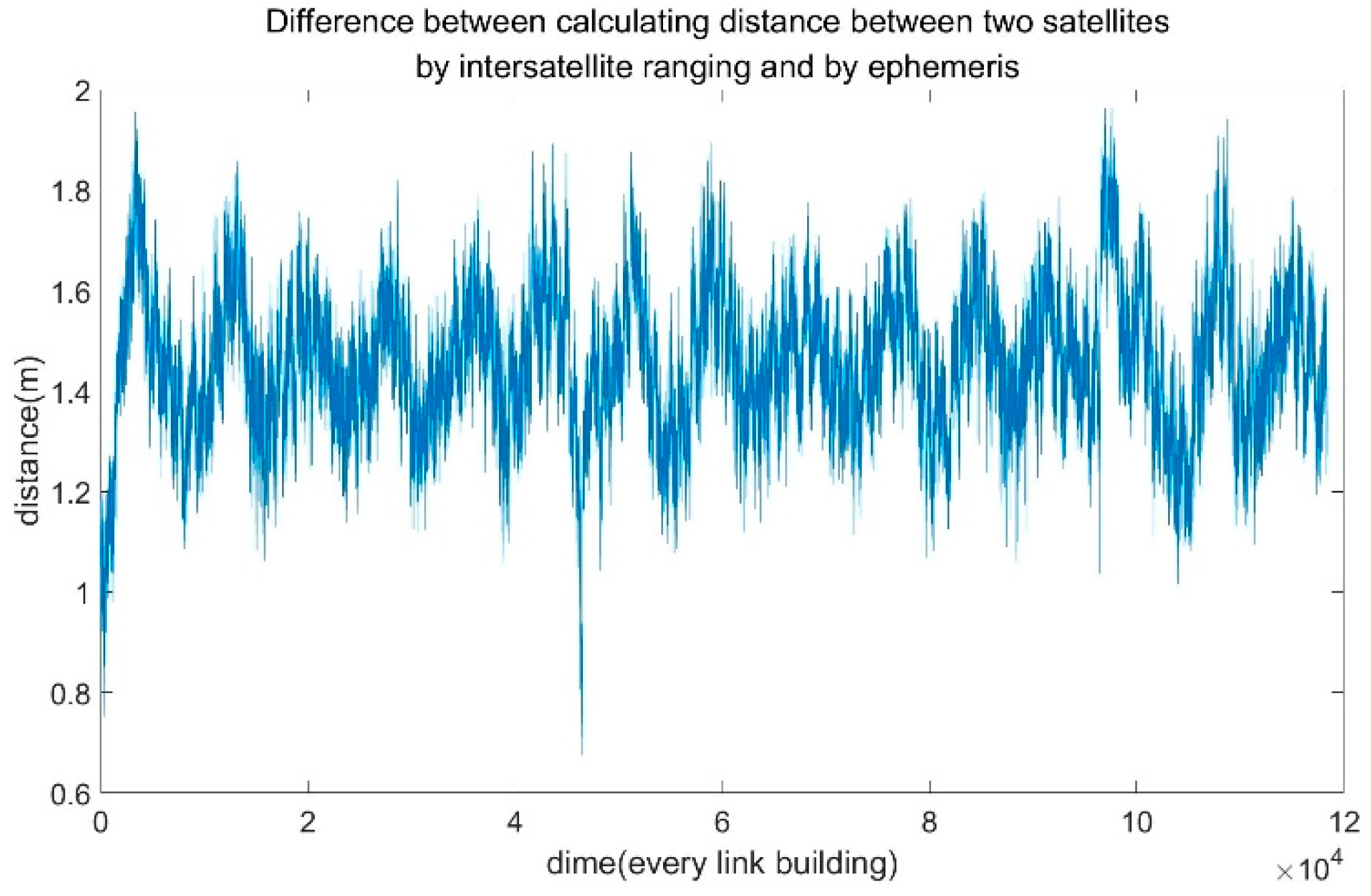
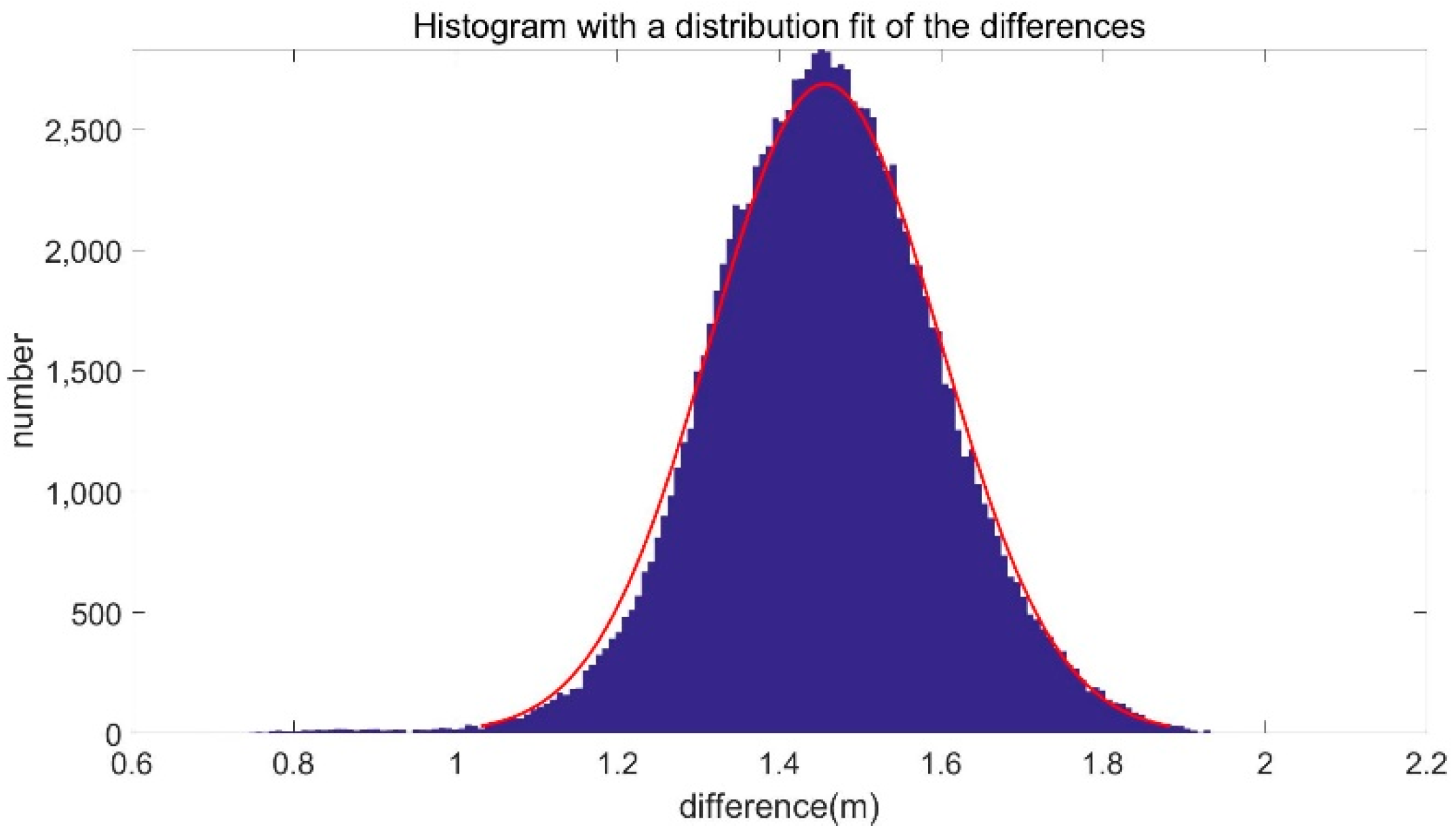
can be measured simultaneously in Formula (2) before they are added together and the clock error parameters are eliminated to obtain the geometric distance. The measured value is used to find the difference in the geometric distance calculated by using the broadcast ephemeris to obtain the distance between two satellites and ultimately obtain the inter-satellite link’s ranging residual, which can be used to judge whether the ephemeris of the two satellites is normal. If the ephemeris of Satellite A or Satellite B is abnormal, the ranging residual will increase. Since it is impossible to determine whether the faulty satellite is Satellite A or Satellite B, it is necessary to use the ranging residuals of at least two other satellites for a comprehensive judgment to identify the faulty satellite.



 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}