
Research on the Rotational Correction of Distributed Autonomous Orbit Determination in the Satellite Navigation Constellation

Abstract
:1. Introduction
2. Autonomous Orbit Determination Model
2.1. Observation Model for Autonomous Orbit Determination
2.2. Rotation Correction Model
2.2.1. Theoretical Analysis of the Influence of the Overall Constellation Rotation
2.2.2. Algorithm for Independent Satellite Constraints
2.2.3. Algorithm for Global Satellite Constraints
3. Analysis of the Inter-Satellite Measurement Situation
3.1. Analysis of the Link Establishment Situation for Inter-Satellite Links
3.2. Constellation Configuration Analysis for Autonomous Orbit Determination
4. Orbit Determination Results
4.1. Processing Cases and Strategies for Autonomous Orbit Determination
4.2. Data Processing Strategies for Autonomous Orbit Determination
4.3. Analysis of Experimental Results
5. Conclusions
- (1)
- The BDS-3 inter-satellite ranging data show satisfactory continuity, and the average number of established links for a single satellite was approximately 14.4. The geometric configuration of inter-satellite link establishment was good, with an average PDOP of approximately 0.99.
- (2)
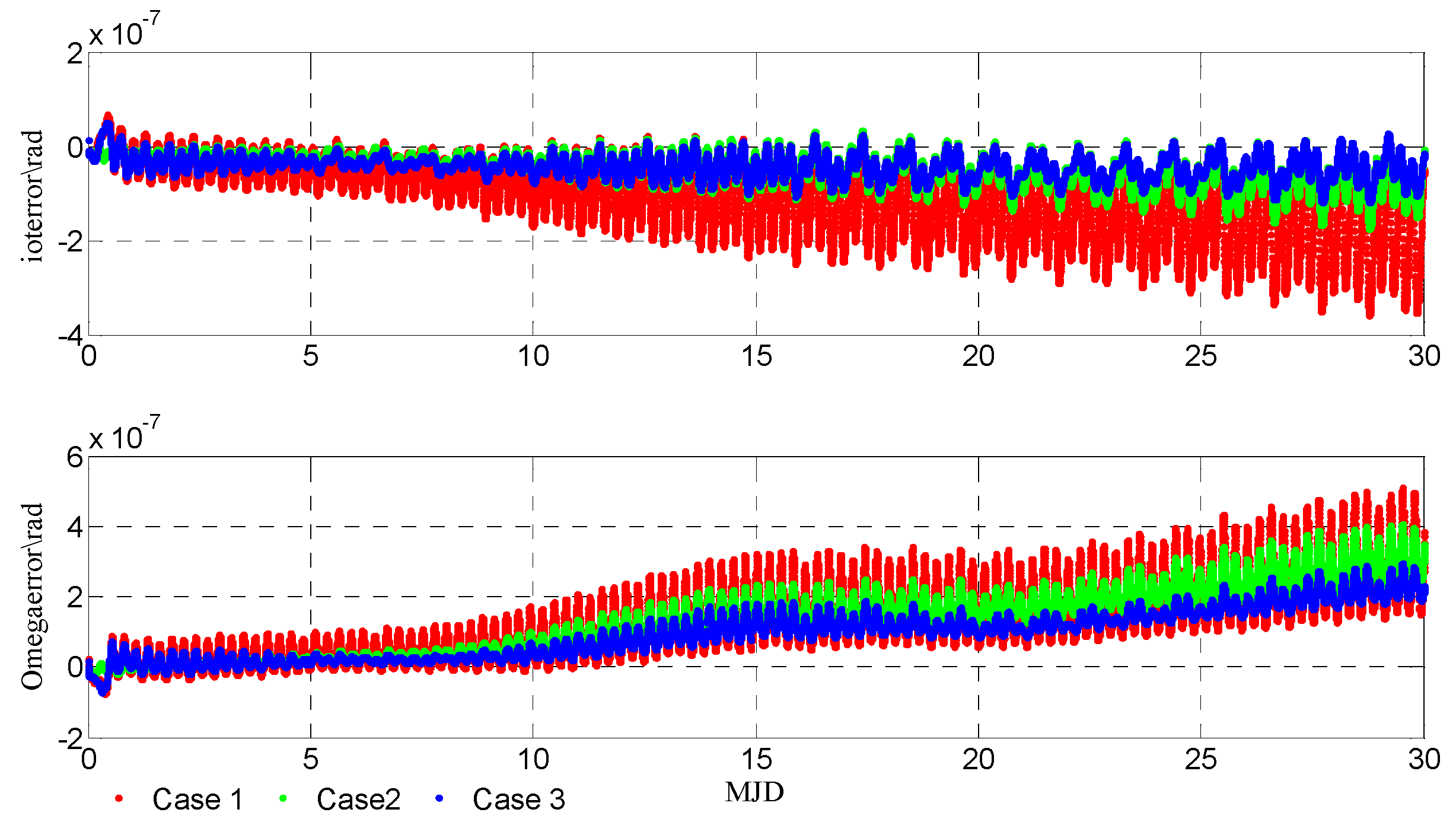
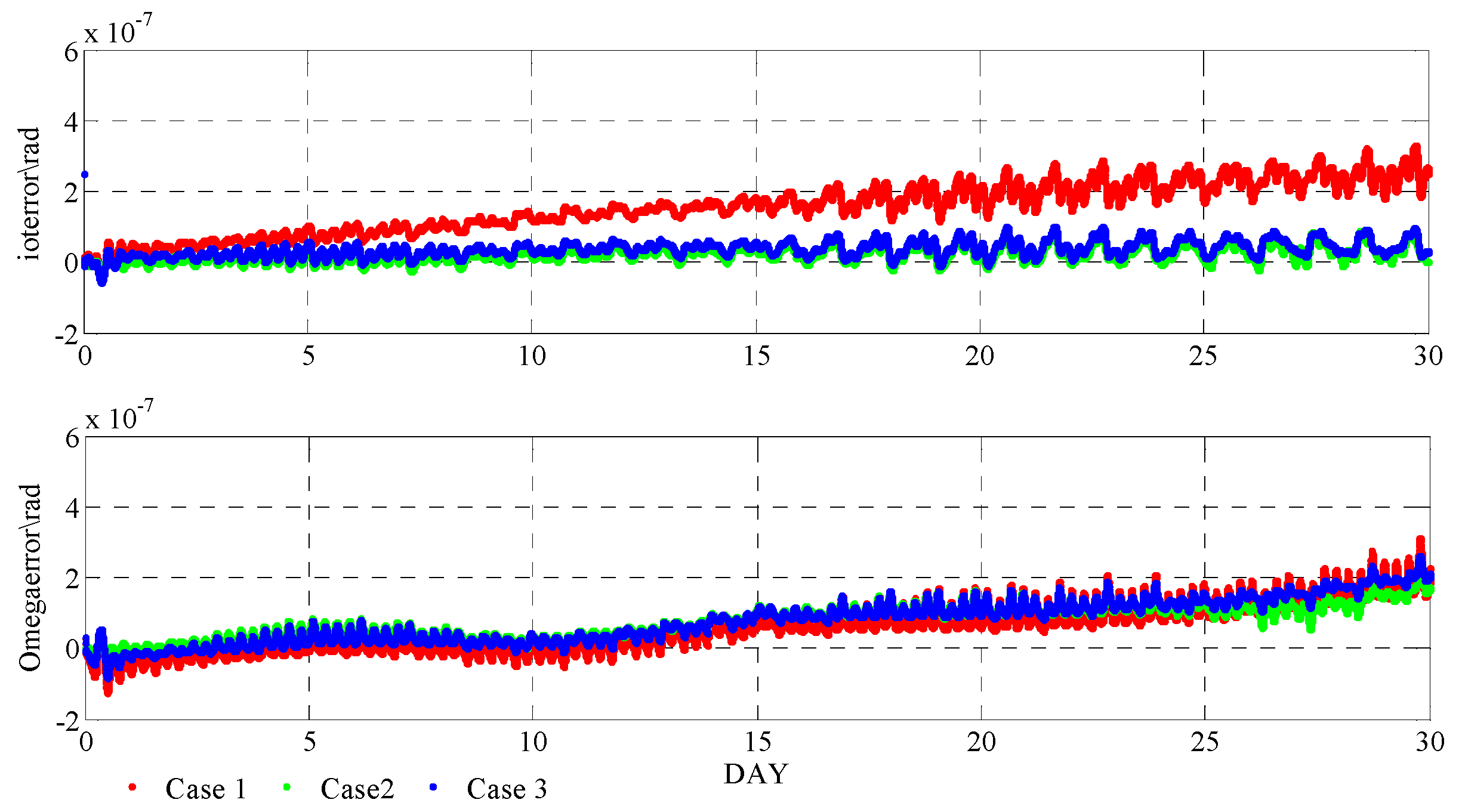
- Among three rotation-correction cases, the algorithm for independent satellite constraints and the global satellite constraints constrained the constellation rotation on the X and the Y axes better. However, this method did not improve the Z-axis rotation errors caused by the prediction errors in UT1-UTC.
- (3)
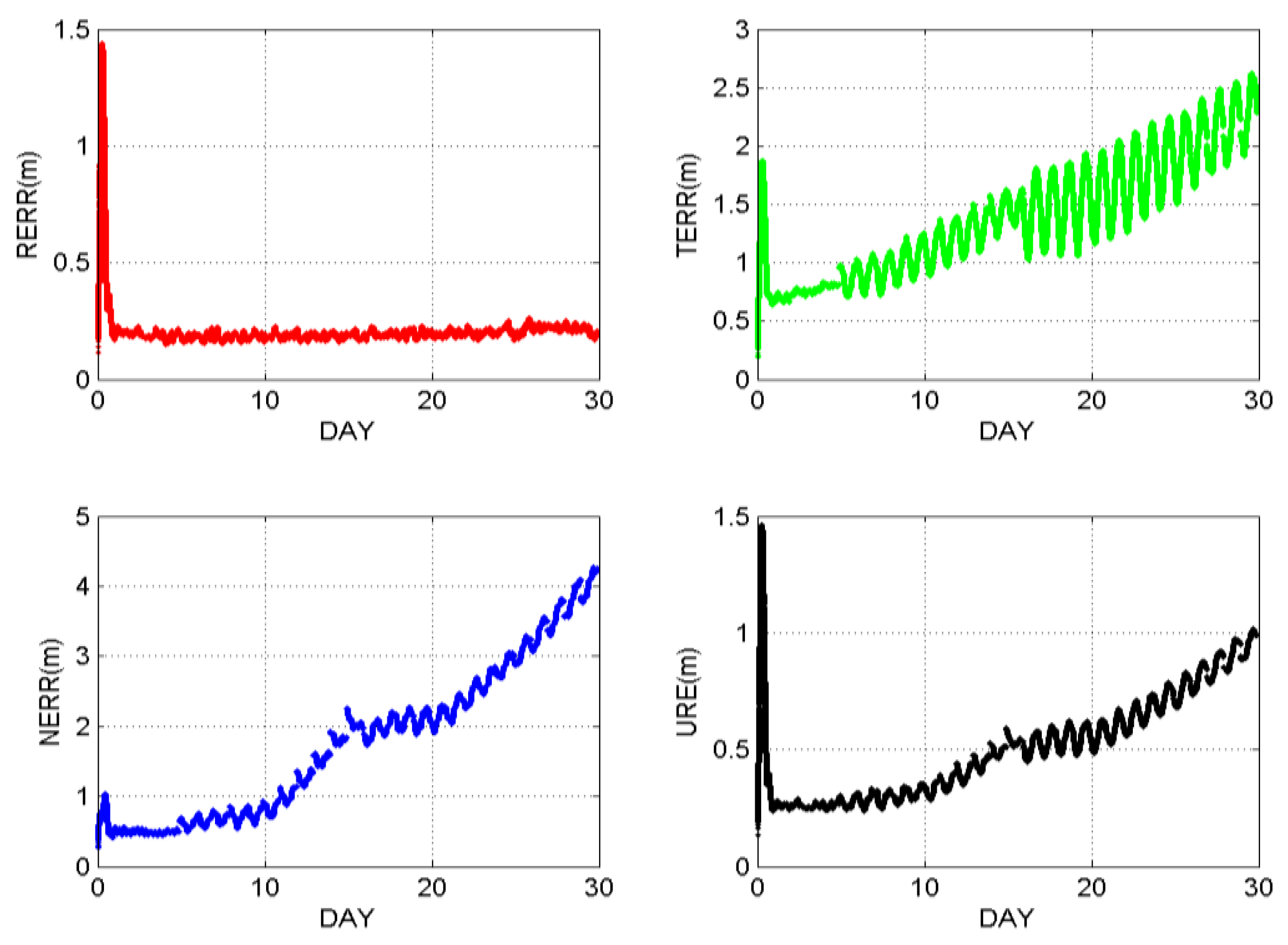
- Under the three rotation-correction schemes, distributed autonomous orbit determination processing can be carried out. Compared with precise ephemeris, it shows that without external constraints, the accuracy of autonomous orbit determination deteriorates with time. With no correction algorithm applied, the average RMS of the 30-day orbit URE of autonomous orbit determination was 1.41 m. Using the algorithm for independent satellite constraints, the average RMS of the 30-day orbit URE was 1.09 m. Using the algorithm for global satellite constraints, the average RMS of the 30-day orbital URE was 0.94 m, and this scheme achieves stable and reliable autonomous orbit determination results.
- (4)
- Both the algorithm for independent satellite constraints and the algorithm for global satellite constraints can weaken the influence of the overall constellation rotation. The former will affect the integrity of the constellation configuration as a rigid body to a certain extent, while the later solves this problem perfectly. Among the three schemes, the 30-day accuracy of autonomous orbit determination using the algorithm for global constraints on satellites was the best.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ananda, M.P.; Berstein, H.; Bruce, R.W. Autonomous Navigation of the Global Positioning System Satellites. In Proceedings of the AIAA Guidance and Control Conference, Seattle, WA, USA, 20–22 August 1984; pp. 1–11. [Google Scholar]
- Abusali, P.A.M.; Tapley, B.D.; Schutz, B.E. Autonomous Navigation of Global Positioning System Satellites Using Cross-Link Measurements. J. Guid. Control. Dyn. 2015, 21, 321–327. [Google Scholar] [CrossRef]
- Tan, S. Development and Thought of Compass Navigation Satellite System. J. Astronaut. 2008, 29, 391–396. [Google Scholar]
- Ananda, M.P.; Bernstein, H.; Cunningham, K.E.; Feess, W.A.; Stroud, E.G. Global Positioning System (GPS) autonomous navigation. In Proceedings of the IEEE Position Location & Navigation Symposium, Las Vegas, NV, USA, 20 March 1990. [Google Scholar]
- Rajan, J.A.; Orr, M.; Wang, P. On-Orbit Validation of GPS IIR Autonomous Navigation. In Proceedings of the ION 59th Annual Meeting/CIGTF 22nd Guidance Test Symposium, Albuquerque, NM, USA, 23–25 June 2003. [Google Scholar]
- Chen, Z.; Shuai, P.; Qu, G. Development of Satellite Navigation Systems (Part 1). Aerosp. China 2007, 9, 24–29. [Google Scholar]
- Chen, Z.; Shuai, P.; Qu, G. Development of Satellite Navigation Systems (Part 2). Aerosp. China 2007, 10, 22–25. [Google Scholar]
- Chen, Z.; Shuai, P.; Qu, G. Analysis of technical characteristics and development trend of modern satellite navigation systems. Sci. Chins (Ser. E) Technol. Sci. 2009, 39, 686–695. [Google Scholar]
- Menn, M.D.; Bernstein, H. Ephemeris Observability Issues in the Global Positioning System Autonomous Navigation (AUTONAV). In Proceedings of the Position Location and Navigation Symposium, New York, NY, USA, 11–15 April 1994; pp. 677–680. [Google Scholar]
- Rajan J, A. Highlights of GPS II-R Autonomous Navigation. In Proceedings of the ION 58th Annual Meeting/CIGTF 21st Guidance Test Symposium, Albuquerque, NM, USA, 24–26 June 2002; pp. 354–363. [Google Scholar]
- Fisher, S.C.; Ghassemi, K. GPS IIF-the next generation. Proc. IEEE 1999, 87, 24–47. [Google Scholar] [CrossRef]
- Gill, E. Precise Orbit Determination of the GNSS-2 Space Segment from Ground-Based and Satellite-to-Satellite Tracking. In Proceedings of the 2nd European Symposium on Global Navigation Satellite Systems, Toulouse, France, 20–23 October 1998. [Google Scholar]
- Wolf, R. Satellite Orbit And Ephemeris Determination Using Inter Satellite Links. Ph.D. Thesis, Bundeswehr University Munich, Munich, Germany, 2000. [Google Scholar]
- Eissfeller, B.; Zink, T.; Wolf, R.; Hammesfahr, J.; Hornbostel, A.; Hahn, J.H.; Tavella, P. Autonomous Satellite State Determination by Use of Two-Directional Links. Int. J. Satell. Commun. 2000, 18, 325–346. [Google Scholar] [CrossRef]
- Fernández, F.A. Inter-satellite ranging and inter-satellite communication links for enhancing GNSS satellite broadcast navigation data. Adv. Space Res. 2011, 47, 786–801. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y. Study on the problem of rank deficiency in autonomous orbit determination with relative measurements between satellites. J. Spacecr. TTC Technol. 2000, 29, 13–16. [Google Scholar]
- Liu, Y.; Liu, L. On the Problem of Orbit Determination with Satellite-Satellite Tracking. J. Spacecr. TTC Technol. 2000, 19, 7–14. [Google Scholar]
- Liu, Y.; Liu, L. On the Problem of Joint Orbit Determination with Satellite-Satellite Tracking and Ground Tracking. Publ. Purple Mt. Obs. 2000, 19, 117–120. [Google Scholar]
- Zhang, Y. Study on the Methods of Autonomous Orbit Determination for the Constellation Based on Inter-satellite Observation. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2005. [Google Scholar]
- Chen, J.; Jiao, W.; Ma, J.; Song, X. Autonav of Navigation Satellite Constellation Based on Crosslink Range and Orientation Parameters Constraining. Geomat. Inf. Sci. Wuhan Univ. 2005, 30, 439–443. [Google Scholar]
- Chen, J.; You, Z.; Jiao, W. Research on Autonav of Navigation Satellite Constellation Based on Crosslink Range and Inter-satellites Orientation Observation. J. Astronaut. 2005, 26, 43–46. [Google Scholar]
- Cai, Z.; Han, C.; Chen, J. Constellation Rotation Error Analysis and Control in Long-term Autonomous Orbit Determination for Navigation Satellites. J. Astronaut. 2008, 29, 522–528. [Google Scholar]
- Liu, W. Research and Simulation on Autonomous Orbit Determination and Combined Orbit Determination of Navigation Satellites. Ph.D. Thesis, Wuhan University, Wuhan, China, 2008. [Google Scholar]
- Wang, F.; Liu, W.; Lin, X. Distributed Autonomous Orbit Determination of Global Navigation Constellation Via Inter-Satellite Pseudo-Ranging Measurements. In Proceedings of the Electronic Collection of the 2nd China Satellite Navigation Conference, Shanghai, China, 18 May 2011. [Google Scholar]
- Zheng, J.; Lin, Y.; Chen, Z. GPS Crosslink Technology and Autonomous Navigation Algorithm. Spacecr. Eng. 2009, 18, 28–35. [Google Scholar]
- Chen, Y.; Hu, X.; Zhou, S.; Song, X.; Huang, Y.; Mao, Y.; Huang, C.; Chang, Z.; Wu, S. A new autonomous orbit determination algorithm based on inter-satellite ranging measurements. Sci. Sin. Phys. Mech. Astron. 2015, 45, 079511. [Google Scholar]
- Du, Y. Study on the Whole Rotation and Suppression Method of Autonomous Orbit Constellation of Distributed Navigation Satellite. Ph.D. Thesis, Wuhan University, Wuhan, China, 2015. [Google Scholar]
- Gong, X.; Li, Z.; Liu, W.; Wang, F. GPS satellite-Earth joint orbit determination based on pseudorange observation values measured by ground stations. In Proceedings of the CPGPS2010, Shanghai, China, 18–20 August 2010; p. 8. [Google Scholar]
- Gong, X. Research on Centralized Autonomous Realtime Orbit Determination and Time Synchronization of BDS. Ph.D. Thesis, Wuhan University, Wuhan, China, 2013. [Google Scholar]
- Li, Z.; Xin, J.; Guo, R.; Li, X.; Tang, C.; Tian, Y. Feasibility Analysis of Autonomous Orbit Determination of BDS Satellites with Inter-Satellite Links. Geomat. Inf. Sci. Wuhan Univ. 2022, 47, 55–60. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PRN | Maximum Number of Established Links | Minimum Number of Established Links | Mean |
|---|---|---|---|
| 25 | 20 | 0 | 14.55 |
| 26 | 20 | 0 | 14.55 |
| 27 | 20 | 0 | 14.41 |
| 28 | 20 | 0 | 14.25 |
| 29 | 20 | 0 | 14.20 |
| 30 | 20 | 0 | 13.68 |
| 19 | 20 | 0 | 14.56 |
| 20 | 20 | 0 | 14.48 |
| 21 | 20 | 0 | 14.41 |
| 22 | 20 | 0 | 14.73 |
| 23 | 20 | 0 | 14.97 |
| 24 | 20 | 0 | 14.95 |
| 32 | 20 | 0 | 15.06 |
| 33 | 19 | 0 | 13.98 |
| 34 | 20 | 0 | 13.92 |
| 35 | 20 | 0 | 14.21 |
| 36 | 20 | 0 | 14.45 |
| 37 | 20 | 0 | 14.58 |
| 38 | 20 | 0 | 14.66 |
| 39 | 20 | 0 | 14.80 |
| 40 | 20 | 0 | 14.01 |
| 41 | 20 | 0 | 14.18 |
| 42 | 20 | 0 | 14.91 |
| 43 | 20 | 0 | 14.09 |
| Mean | 19.96 | 0 | 14.45 |
| PRN | Minimum | Maximum | Mean |
|---|---|---|---|
| 25 | 0.75 | 3.33 | 0.94 |
| 26 | 0.73 | 4.59 | 0.95 |
| 27 | 0.73 | 3.93 | 0.96 |
| 28 | 0.74 | 3.54 | 0.97 |
| 29 | 0.73 | 4.50 | 0.96 |
| 30 | 0.73 | 4.04 | 0.98 |
| 19 | 0.75 | 2.89 | 0.95 |
| 20 | 0.73 | 5.57 | 0.95 |
| 21 | 0.75 | 5.31 | 0.96 |
| 22 | 0.74 | 4.95 | 0.96 |
| 23 | 0.74 | 4.23 | 0.94 |
| 24 | 0.74 | 4.63 | 0.94 |
| 32 | 0.73 | 3.07 | 0.94 |
| 33 | 0.75 | 3.39 | 0.98 |
| 34 | 0.74 | 5.64 | 0.98 |
| 35 | 0.73 | 4.71 | 0.96 |
| 36 | 0.75 | 2.91 | 0.96 |
| 37 | 0.75 | 5.96 | 0.95 |
| 38 | 0.73 | 4.42 | 0.94 |
| 39 | 0.74 | 5.70 | 0.94 |
| 40 | 0.74 | 4.04 | 1.06 |
| 41 | 0.75 | 4.21 | 1.77 |
| 42 | 0.75 | 3.93 | 0.94 |
| 43 | 0.75 | 4.62 | 0.97 |
| Mean | 0.74 | 4.41 | 0.99 |
| Parameter | Model |
|---|---|
| Observed values | Observation data of inter-satellite links |
| Observation interval | 1 min |
| Satellite transceiver delay | Not estimated, calibrated numerical values are adopted |
| Gravity field model | Earth Gravitational Model 2008 (EGM2008) model to the 8th order |
| Tidal correction | Only solid tides are considered |
| Solar radiation pressure model | ECOM model, parameters not estimated |
| EOP | International Earth Rotation and Reference Systems Service (IERS) prediction of EOP (Bulletin A) |
| Gravitational force of N body | Considers the gravitational forces of the sun and moon |
| Parameters of the initial orbit | Broadcast ephemeris orbit |
| Parameters of the initial clock offset | Broadcast ephemeris clock offset |
| Estimator | Extended Kalman filter (EKF) |
| Parameters to be estimated | Only the position and velocity parameters of each satellite are estimated |
| PRN | i/rad | /rad | ||||
|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 1 | Case 2 | Case 3 | |
| 25 | 1.99 × 10−7 | 2.86 × 10−8 | 4.65 × 10−8 | 3.07 × 10−7 | 1.94 × 10−7 | 2.23 × 10−7 |
| 26 | 2.19 × 10−7 | 3.70 × 10−8 | 5.33 × 10−8 | 3.06 × 10−7 | 2.17 × 10−7 | 2.29 × 10−7 |
| 27 | 2.65 × 10−7 | 5.72 × 10−8 | 6.06 × 10−8 | 1.75 × 10−7 | 1.59 × 10−7 | 1.92 × 10−7 |
| 28 | 2.65 × 10−7 | 5.83 × 10−8 | 6.14 × 10−8 | 1.80 × 10−7 | 2.03 × 10−7 | 1.92 × 10−7 |
| 29 | 2.53 × 10−7 | 4.16 × 10−8 | 5.43 × 10−8 | 1.97 × 10−7 | 1.62 × 10−7 | 2.03 × 10−7 |
| 30 | 2.57 × 10−7 | 4.91 × 10−8 | 5.77 × 10−8 | 1.84 × 10−7 | 1.26 × 10−7 | 1.93 × 10−7 |
| 19 | 1.59 × 10−7 | 2.98 × 10−8 | 4.83 × 10−8 | 1.41 × 10−7 | 1.63 × 10−7 | 1.30 × 10−7 |
| 20 | 1.58 × 10−7 | 4.32 × 10−8 | 4.46 × 10−8 | 1.49 × 10−7 | 1.78 × 10−7 | 1.52 × 10−7 |
| 21 | 1.59 × 10−7 | 5.99 × 10−8 | 4.49 × 10−8 | 1.50 × 10−7 | 1.28 × 10−7 | 1.57 × 10−7 |
| 22 | 1.52 × 10−7 | 4.16 × 10−8 | 4.62 × 10−8 | 1.51 × 10−7 | 1.35 × 10−7 | 1.30 × 10−7 |
| 23 | 2.04 × 10−7 | 4.09 × 10−8 | 5.07 × 10−8 | 2.96 × 10−7 | 2.11 × 10−7 | 2.17 × 10−7 |
| 24 | 2.12 × 10−7 | 4.39 × 10−8 | 5.18 × 10−8 | 3.21 × 10−7 | 2.30 × 10−7 | 2.32 × 10−7 |
| 32 | 1.74 × 10−7 | 6.73 × 10−8 | 5.98 × 10−8 | 1.65 × 10−7 | 1.58 × 10−7 | 1.48 × 10−7 |
| 33 | 1.55 × 10−7 | 5.43 × 10−8 | 4.46 × 10−8 | 1.41 × 10−7 | 1.58 × 10−7 | 1.58 × 10−7 |
| 34 | 2.59 × 10−7 | 3.52 × 10−8 | 5.92 × 10−8 | 1.89 × 10−7 | 2.55 × 10−7 | 1.99 × 10−7 |
| 35 | 2.61 × 10−7 | 5.24 × 10−8 | 5.82 × 10−8 | 1.97 × 10−7 | 2.23 × 10−7 | 2.05 × 10−7 |
| 36 | 2.02 × 10−7 | 5.66 × 10−8 | 5.13 × 10−8 | 3.16 × 10−7 | 2.00 × 10−7 | 2.29 × 10−7 |
| 37 | 2.22 × 10−7 | 5.07 × 10−8 | 5.70 × 10−8 | 3.02 × 10−7 | 1.92 × 10−7 | 2.22 × 10−7 |
| 41 | 1.50 × 10−7 | 5.84 × 10−8 | 4.47 × 10−8 | 1.53 × 10−7 | 1.43 × 10−7 | 1.50 × 10−7 |
| 42 | 1.58 × 10−7 | 5.48 × 10−8 | 4.31 × 10−8 | 1.50 × 10−7 | 1.58 × 10−7 | 1.56 × 10−7 |
| 43 | 2.58 × 10−7 | 4.47 × 10−8 | 5.91 × 10−8 | 1.94 × 10−7 | 2.48 × 10−7 | 2.01 × 10−7 |
| 44 | 2.64 × 10−7 | 5.95 × 10−8 | 6.02 × 10−8 | 1.87 × 10−7 | 2.23 × 10−7 | 1.99 × 10−7 |
| 45 | 2.08 × 10−7 | 9.51 × 10−8 | 5.37 × 10−8 | 2.98 × 10−7 | 3.24 × 10−7 | 2.25 × 10−7 |
| 46 | 2.17 × 10−7 | 8.82 × 10−8 | 5.66 × 10−8 | 3.19 × 10−7 | 3.12 × 10−7 | 2.31 × 10−7 |
| RMS | 2.11 × 10−7 | 5.43 × 10−8 | 5.31 × 10−8 | 2.25 × 10−7 | 2.03 × 10−7 | 1.95 × 10−7 |
| STD | 1.58 × 10−7 | 1.55 × 10−8 | 6.04 × 10−9 | 6.78 × 10−7 | 5.15 × 10−8 | 2.91 × 10−8 |
| Case | RERR (m) | TERR (m) | NERR (m) | URE (m) |
|---|---|---|---|---|
| Case 1 | 0.17 | 4.70 | 4.55 | 1.41 |
| Case 2 | 0.54 | 2.21 | 4.07 | 1.09 |
| Case 3 | 0.17 | 2.14 | 4.02 | 0.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Cai, H.; Li, Z.; Tang, C.; Hu, X.; Liu, W. Research on the Rotational Correction of Distributed Autonomous Orbit Determination in the Satellite Navigation Constellation. Remote Sens. 2022, 14, 3309. https://doi.org/10.3390/rs14143309
Zhou W, Cai H, Li Z, Tang C, Hu X, Liu W. Research on the Rotational Correction of Distributed Autonomous Orbit Determination in the Satellite Navigation Constellation. Remote Sensing. 2022; 14(14):3309. https://doi.org/10.3390/rs14143309
Chicago/Turabian StyleZhou, Wei, Hongliang Cai, Ziqiang Li, Chengpan Tang, Xiaogong Hu, and Wanke Liu. 2022. "Research on the Rotational Correction of Distributed Autonomous Orbit Determination in the Satellite Navigation Constellation" Remote Sensing 14, no. 14: 3309. https://doi.org/10.3390/rs14143309