
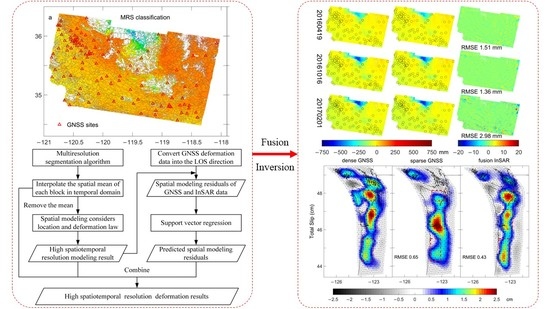
Fusion of Spatially Heterogeneous GNSS and InSAR Deformation Data Using a Multiresolution Segmentation Algorithm and Its Application in the Inversion of Slip Distribution



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Methods
2.1. Framework for the Unification of GNSS and InSAR Data
2.2. Clustering of InSAR Data
2.3. Fitting Spatial Mean
2.4. Spatial Modeling
2.5. Estimation of Residuals of Spatial Modeling
2.6. Verification of Accuracy of Results of Fusion
3. Result
3.1. MRSF Experiment for CVAS
3.1.1. GNSS and InSAR Data
3.1.2. Experiment Fusion Results
3.1.3. Leave-One-Out Cross-Validation
3.2. Inversion of Slip Distribution of the Cascadia Subduction Zone
3.2.1. Data for Inversion of Slip Distribution
3.2.2. Design of Experimental Scheme
- (1)
- Construct triangular dislocation meshes according to the defined extent of the research area and depth contours [30].
- (2)
- Link slip with GNSS and InSAR displacement observations by elastic Green’s function [31], and obtain the observation equation and variance–covariance matrix of all displacement observations.
- (3)
- Use the evolution law of slip magnitude and slip rate with time to construct the state transition equation.
- (4)
- Determine the variance–covariance matrix of the process noise.
- (5)
- Combine with Kalman forward filtering and backward smoothing [32] with all displacement observations used for constraining the inversion of slip distribution.
- (6)
- Through Kalman forward filtering and backward smoothing, obtain the slip rate and slip magnitude corresponding to the observed moment on each dislocation grid.
3.2.3. Results of Inversion
4. Discussion
4.1. MRSF Experiment
4.2. Inversion of Slip Distribution
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, B.; Feng, G.; Li, Z.; Wang, Q.; Wang, C.; Xie, R. Coastal Subsidence Monitoring Associated with Land Reclamation Using the Point Target Based SBAS-InSAR Method: A Case Study of Shenzhen, China. Remote Sens. 2016, 8, 652. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Wu, S.; Materna, K.; Nadeau, R.; Floyd, M.; Funning, G.; Chaussard, E.; Johnson, C.W.; Murray, J.R.; Ding, X.; et al. Interseismic Ground Deformation and Fault Slip Rates in the Greater San Francisco Bay Area from Two Decades of Space Geodetic Data. J. Geophys. Res. Solid Earth 2018, 123, 8095–8109. [Google Scholar] [CrossRef]
- Aloisi, M.; Bonaccorso, A.; Cannavò, F.; Currenti, G.; Gambino, S. The 24 December 2018 Eruptive Intrusion at Etna Volcano as Revealed by Multidisciplinary Continuous Deformation Networks (CGPS, Borehole Strainmeters and Tiltmeters). J. Geophys. Res. Solid Earth 2020, 125, e2019JB019117. [Google Scholar] [CrossRef]
- Xu, X.; Sandwell, D.T.; Klein, E.; Bock, Y. Integrated Sentinel-1 InSAR and GNSS Time-Series Along the San Andreas Fault System. J. Geophys. Res. Solid Earth 2021, 126, e2021JB022579. [Google Scholar] [CrossRef]
- Li, S.; Xu, W.; Li, Z. Review of the SBAS InSAR Time-Series Algorithms, Applications, and Challenges. Geod. Geodyn. 2022, 13, 114–126. [Google Scholar] [CrossRef]
- Liu, N.; Dai, W.; Santerre, R.; Hu, J.; Shi, Q.; Yang, C. High Spatio-Temporal Resolution Deformation Time Series with the Fusion of InSAR and GNSS Data Using Spatio-Temporal Random Effect Model. IEEE Trans. Geosci. Remote Sens. 2018, 57, 364–380. [Google Scholar] [CrossRef]
- Shi, Q.; Dai, W.; Santerre, R.; Li, Z.; Liu, N. Spatially Heterogeneous Land Surface Deformation Data Fusion Method Based on an Enhanced Spatio-Temporal Random Effect Model. Remote Sens. 2019, 11, 1084. [Google Scholar] [CrossRef] [Green Version]
- Yan, H.; Dai, W.; Xie, L.; Xu, W. Fusion of GNSS and InSAR Time Series Using the Improved STRE Model: Applications to the San Francisco Bay Area and Southern California. J. Geod. 2022, 96, 47. [Google Scholar] [CrossRef]
- Deng, F.; Dixon, T.H.; Xie, S. Surface Deformation and Induced Seismicity Due to Fluid Injection and Oil and Gas Extraction in Western Texas. J. Geophys. Res. Solid Earth. 2020, 125, e2019JB018962. [Google Scholar] [CrossRef]
- Neely, W.R.; Borsa, A.A.; Burney, J.A.; Levy, M.C.; Silverii, F.; Sneed, M. Characterization of Groundwater Recharge and Flow in California’s San Joaquin Valley from InSAR-Observed Surface Deformation. Water Resour. Res. 2021, 57, e2020WR028451. [Google Scholar] [CrossRef]
- Ma, P.; Wang, W.; Zhang, B.; Wang, J.; Shi, G.; Huang, G.; Chen, F.; Jiang, L.; Lin, H. Remotely Sensing Large- and Small-Scale Ground Subsidence: A Case Study of the Guangdong–Hong Kong–Macao Greater Bay Area of China. Remote Sens. Environ. 2019, 232, 111282. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-Resolution, Object-Oriented Fuzzy Analysis of Remote Sensing Data for GIS-Ready Information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Witharana, C.; Civco, D.L. Optimizing Multi-Resolution Segmentation Scale Using Empirical Methods: Exploring the Sensitivity of the Supervised Discrepancy Measure Euclidean Distance 2 (ED2). ISPRS J. Photogramm. Remote Sens. 2014, 87, 108–121. [Google Scholar] [CrossRef]
- Oberhettinger, F. Tables of Fourier Transforms and Fourier Transforms of Distributions; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Li, Z. An Enhanced Dual IDW Method for High-Quality Geospatial Interpolation. Sci. Rep. 2021, 11, 9903. [Google Scholar] [CrossRef]
- Levenberg, K. A Method for the Solution of Certain Non-Linear Problems in Least Squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. (TIST) 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Neely, W.R.; Borsa, A.A.; Silverii, F. GInSAR: A CGPS Correction for Enhanced InSAR Time Series. IEEE Trans. Geosci. Remote Sens. 2019, 58, 136–146. [Google Scholar] [CrossRef]
- Fialko, Y.; Simons, M.; Agnew, D. The Complete (3-D) Surface Displacement Field in the Epicentral Area of the 1999 Mw7. 1 Hector Mine Earthquake, California, from Space Geodetic Observations. Geophys. Res. Lett. 2001, 28, 3063–3066. [Google Scholar] [CrossRef] [Green Version]
- Jenks, G.F. The Data Model Concept in Statistical Mapping. Int. Yearb. Cartogr. 1967, 7, 186–190. [Google Scholar]
- Cressie, N.; Johannesson, G. Fixed Rank Kriging for Very Large Spatial Data Sets. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2008, 70, 209–226. [Google Scholar] [CrossRef]
- Smola, A.J.; Schölkopf, B. A Tutorial on Support Vector Regression. Stat. Comput. 2004, 14, 199–222. [Google Scholar] [CrossRef] [Green Version]
- Kearns, M.; Ron, D. Algorithmic Stability and Sanity-Check Bounds for Leave-One-out Cross-Validation. Neural Comput. 1999, 11, 1427–1453. [Google Scholar] [CrossRef] [PubMed]
- Herring, T.A.; Melbourne, T.I.; Murray, M.H.; Floyd, M.A.; Szeliga, W.M.; King, R.W.; Phillips, D.A.; Puskas, C.M.; Santillan, M.; Wang, L. Plate Boundary Observatory and Related Networks: GPS Data Analysis Methods and Geodetic Products. Rev. Geophys. 2016, 54, 759–808. [Google Scholar] [CrossRef]
- Srinivasa, N.A. Adaptive Mesh Refinement for a Finite Difference Scheme Using a Quadtree Decomposition Approach. Ph.D. Thesis, Texas A&M University, College Station, TX, USA, 2010. [Google Scholar]
- McCrory, P.A.; Blair, J.L.; Waldhauser, F.; Oppenheimer, D.H. Juan de Fuca Slab Geometry and Its Relation to Wadati-Benioff Zone Seismicity. J. Geophys. Res. Solid Earth 2012, 117, B09306. [Google Scholar] [CrossRef] [Green Version]
- Bartlow, N.M.; Wallace, L.M.; Beavan, R.J.; Bannister, S.; Segall, P. Time-Dependent Modeling of Slow Slip Events and Associated Seismicity and Tremor at the Hikurangi Subduction Zone, New Zealand. J. Geophys. Res. Solid Earth 2014, 119, 734–753. [Google Scholar] [CrossRef]
- Bekaert, D.; Segall, P.; Wright, T.J.; Hooper, A.J. A Network Inversion Filter Combining GNSS and InSAR for Tectonic Slip Modeling. J. Geophys. Res. Solid Earth 2016, 121, 2069–2086. [Google Scholar] [CrossRef] [Green Version]
- Xu, W. Finite-Fault Slip Model of the 2016 Mw 7.5 Chiloé Earthquake, Southern Chile, Estimated from Sentinel-1 Data. Geophys. Res. Lett. 2017, 44, 4774–4780. [Google Scholar] [CrossRef] [Green Version]
- Fukushima, Y.; Cayol, V.; Durand, P. Finding Realistic Dike Models from Interferometric Synthetic Aperture Radar Data: The February 2000 Eruption at Piton de La Fournaise. J. Geophys. Res. Solid Earth 2005, 110, B03206. [Google Scholar] [CrossRef] [Green Version]
- Okada, Y. Surface Deformation Due to Shear and Tensile Faults in a Half-Space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar] [CrossRef]
- Segall, P.; Matthews, M. Time Dependent Inversion of Geodetic Data. J. Geophys. Res. Solid Earth 1997, 102, 22391–22409. [Google Scholar] [CrossRef]
- Pritchard, M.; Simons, M.; Rosen, P.; Hensley, S.; Webb, F. Co-Seismic Slip from the 1995 July 30 M W= 8.1 Antofagasta, Chile, Earthquake as Constrained by InSAR and GPS Observations. Geophys. J. Int. 2002, 150, 362–376. [Google Scholar] [CrossRef] [Green Version]
- Bartlow, N.M.; Miyazaki, S.; Bradley, A.M.; Segall, P. Space-Time Correlation of Slip and Tremor during the 2009 Cascadia Slow Slip Event. Geophys. Res. Lett. 2011, 38, L18309. [Google Scholar] [CrossRef] [Green Version]
- Carlson, G.; Shirzaei, M.; Werth, S.; Zhai, G.; Ojha, C. Seasonal and Long-Term Groundwater Unloading in the Central Valley Modifies Crustal Stress. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018490. [Google Scholar] [CrossRef] [PubMed] [Green Version]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Dai, W.; Liu, H.; Gao, H.; Neely, W.R.; Xu, W. Fusion of Spatially Heterogeneous GNSS and InSAR Deformation Data Using a Multiresolution Segmentation Algorithm and Its Application in the Inversion of Slip Distribution. Remote Sens. 2022, 14, 3293. https://doi.org/10.3390/rs14143293
Yan H, Dai W, Liu H, Gao H, Neely WR, Xu W. Fusion of Spatially Heterogeneous GNSS and InSAR Deformation Data Using a Multiresolution Segmentation Algorithm and Its Application in the Inversion of Slip Distribution. Remote Sensing. 2022; 14(14):3293. https://doi.org/10.3390/rs14143293
Chicago/Turabian StyleYan, Huineng, Wujiao Dai, Hongzhi Liu, Han Gao, Wesley R. Neely, and Wenbin Xu. 2022. "Fusion of Spatially Heterogeneous GNSS and InSAR Deformation Data Using a Multiresolution Segmentation Algorithm and Its Application in the Inversion of Slip Distribution" Remote Sensing 14, no. 14: 3293. https://doi.org/10.3390/rs14143293