
Similarity Analysis between Contour Lines by Remotely Piloted Aircraft and Topography Using Hausdorff Distance: Application on Contour Planting

 , , , , and
, , , , and
Abstract
:
1. Introduction
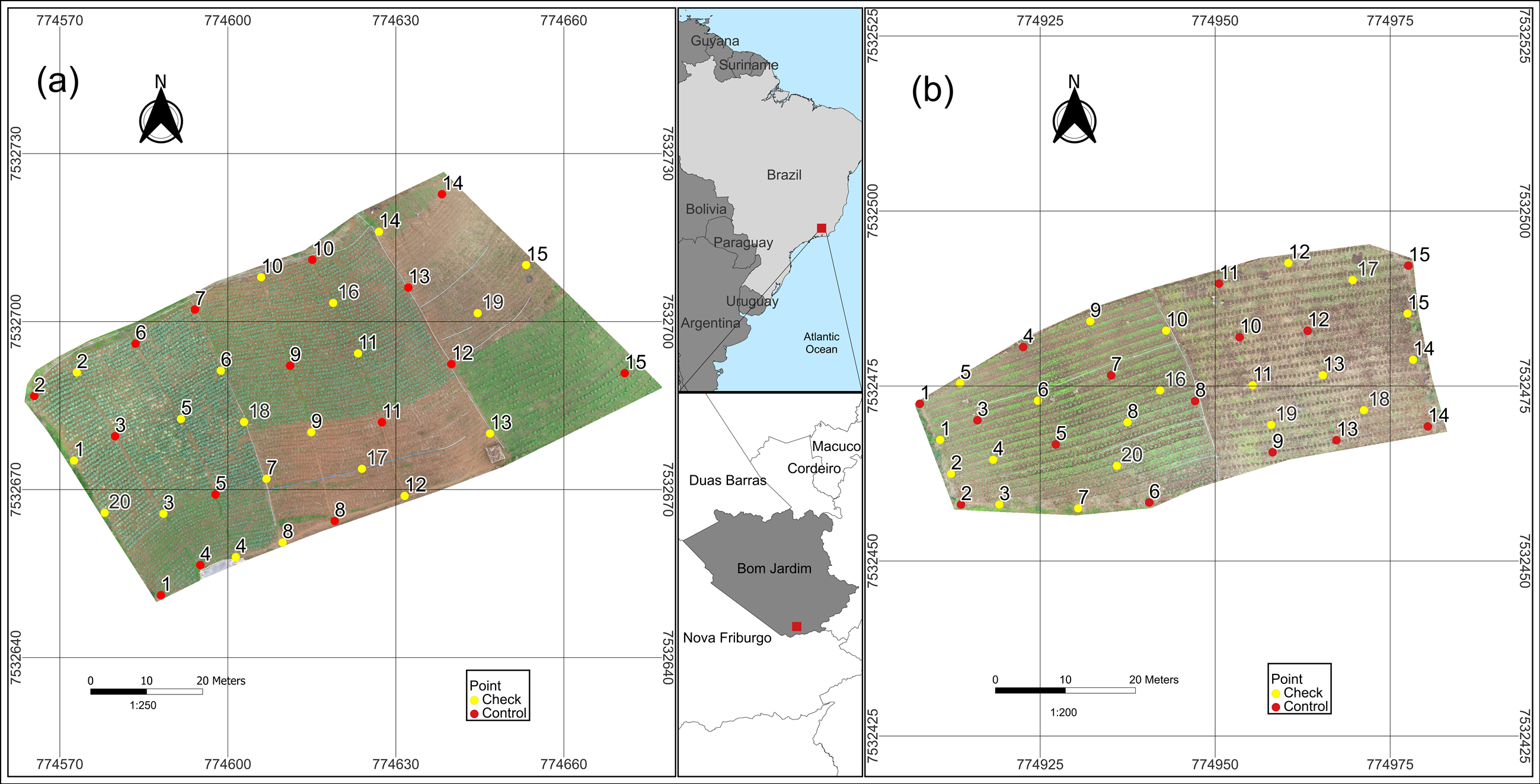
2. Study Area
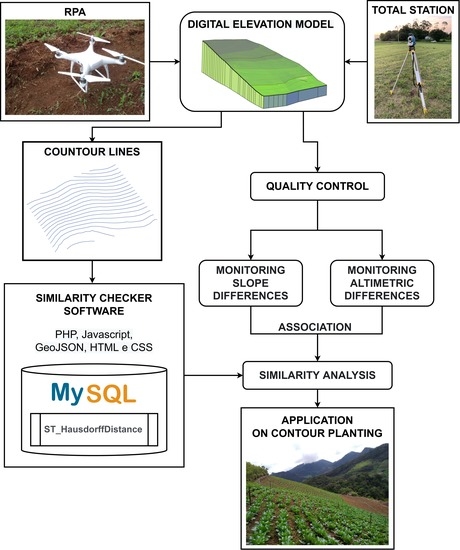
3. Data and Methods
3.1. Data Acquisition and Analysis
3.1.1. Tracking Points by GNSS
3.1.2. Conventional Topographic Survey
3.1.3. Remotely Piloted Aircraft Survey
3.2. Quality Control
- n is the number of samples;
- Xreference as coordinate value (x) in the reference product (m);
- Xtest as coordinate value (x) in the product tested (m).
- n is the number of samples;
- Yreference as coordinate value (y) in the product reference (m);
- Ytest as coordinate value (y) in the reference product (m).
- n is the number of samples;
- Zreference as coordinate value (z) in the reference product (m);
- Ztest as coordinate value (z) in the reference product (m).
3.3. Hausdorff Distance Application
- dH(A,B): as Hausdorff distance.
- sup: as the highest value between two data set.
- h(A,B): as the highest distance between the minimum data set from A to B.
- h(B,A): as the highest distance between the minimum data set from B to A.
3.4. Database System Application of Hausdorff Algorithm
4. Results and Discussion
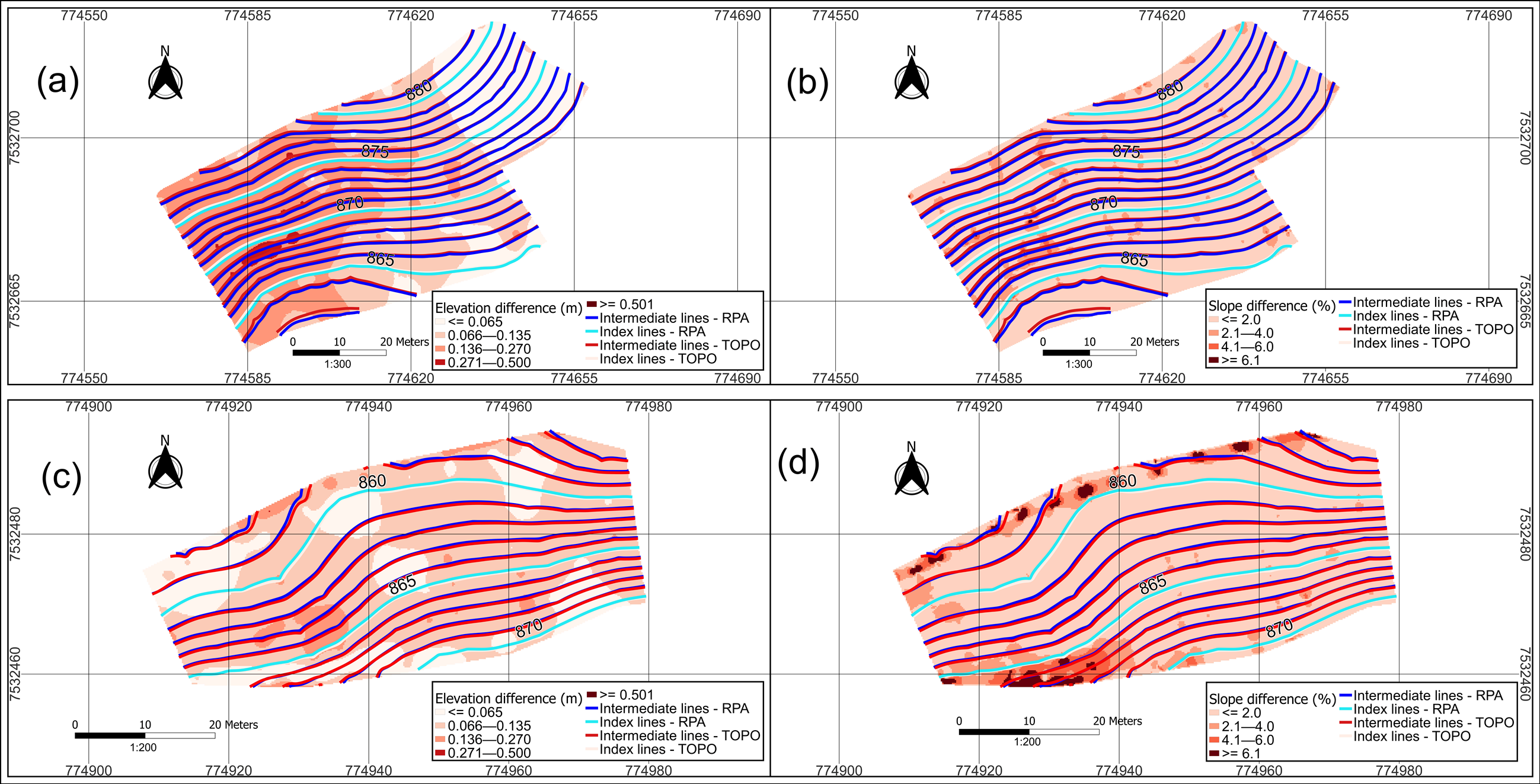
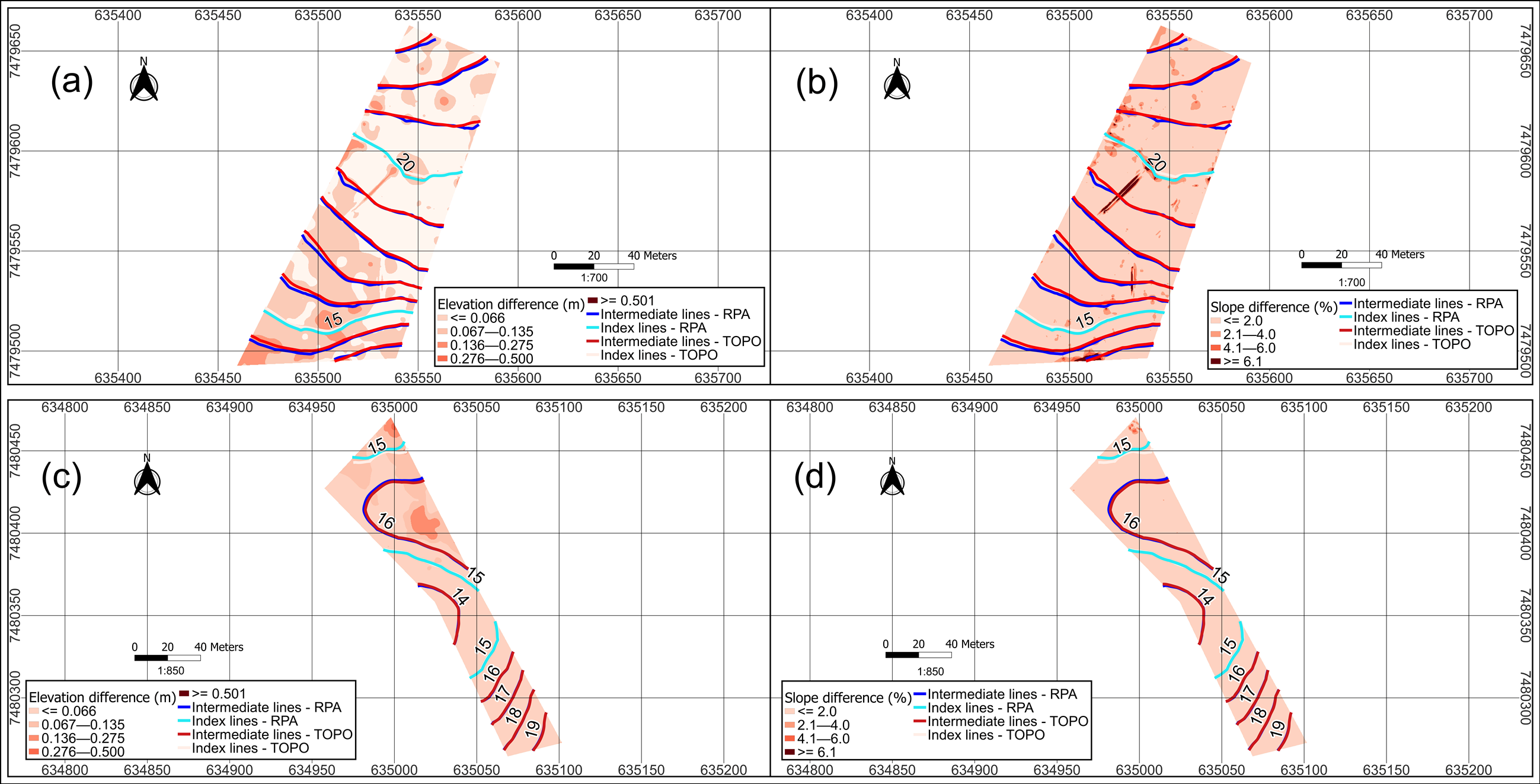
4.1. Differences in Relief Modeling
4.2. Validation and Accuracy Analysis
4.3. Simiarity of Hausdorff Distance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Silva, L.L.; Baptista, F.; Cruz, V.F.; da Silva, J.R.M. Aumentar as competências dos agricultores para a prática de uma agricultura sustentável. Rev. Ciências Agrárias 2020, 43, 240–252. [Google Scholar] [CrossRef]
- Neumann, P.S.; Loch, C. Legislação ambiental, desenvolvimento rural e práticas agrícolas. Ciência Rural 2002, 32, 243–249. [Google Scholar] [CrossRef]
- Santos, F.S.; Amaral Sobrinho, N.M.B.; Mazur, N. Influência de diferentes manejos agrícolas na distribuição de metais pesados no solo e em plantas de tomate. Rev. Bras. Ciência Solo 2002, 26, 535–543. [Google Scholar] [CrossRef] [Green Version]
- Griebeler, N.P.; Pruski, F.F.; Teixeira, A.F.; de Oliveira, L.F. Software to planning the use of level terracing systems in more rational ways. Eng. Agrícola 2005, 25, 841–851. [Google Scholar] [CrossRef] [Green Version]
- Leite, E.F.; Rosa, R. Análise do uso, ocupação e cobertura da terra na bacia hidrográfica do Rio Formiga, Tocantins. Rev. Eletrônica Geogr. 2012, 4, 90–106. [Google Scholar]
- Xavier, M.V.B.; Santos, L.L.; Fonseca, A.P.M.; de Almeida, E.S.; Almeida, L.V.O.; Aguiar, R.M.A.S.; Moreira, C.D.D.; Semensato, B.D.; Ferreira, J.M.; de Oliveira, P.V.A. Capacidade de uso e manejo conservacionista do solo de um fragmento de cerrado. Res. Soc. Dev. 2021, 10, e41410716697. [Google Scholar] [CrossRef]
- Fortini, R.M.; Braga, M.J.; Freitas, C.O. Impacto das práticas agrícolas conservacionistas na produtividade da terra e no lucro dos estabelecimentos agropecuários brasileiros. Rev. Econ. Sociol. Rural 2020, 58, e199479. [Google Scholar] [CrossRef]
- Paccioretti, P.; Córdoba, M.; Balzarini, M. FastMapping: Software to create field maps and identify management zones in precision agriculture. Comput. Electron. Agric. 2020, 175, 105–556. [Google Scholar] [CrossRef]
- Yost, M.A.; Kitchen, N.R.; Sudduth, K.A.; Massey, R.E.; Sadler, E.J.; Drummond, S.T.; Volkmann, M.R. A long-term precision agriculture system sustains grain profitability. Precis. Agric. 2019, 20, 1177–1198. [Google Scholar] [CrossRef]
- Nascimento, H.R.; de Abreu, Y.V. Geração de informações sobre a agricultura de energia por meio das geotecnologias. Interações 2012, 13, 181–189. [Google Scholar] [CrossRef] [Green Version]
- Francisco, H.R.; Corrêia, A.F.; Feiden, A. Classification of areas suitable for fish farming using geotechnology and multi-criteria analysis. ISPRS Int. J. Geo-Inf. 2019, 8, 394. [Google Scholar] [CrossRef] [Green Version]
- Hunt Jr, E.R.; Daughtry, C.S.T. What Good Are Unmanned Aircraft Systems for Agricultural Remote Sensing and Precision Agriculture. Int. J. Remote Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-Based plant height from crop surface models, visible, and near-infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Peña, J.M.; Gutiérrez, P.A.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. Selecting patterns and features for between- and within- crop-row weed mapping using UAV-imagery. Expert Syst. Appl. 2016, 47, 85–94. [Google Scholar] [CrossRef] [Green Version]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Schut, A.G.T.; Traore, P.C.S.; Blaes, X.; By, R.A. Assessing yield and fertilizer response in heterogeneous smallholder fields with UAVs and satellites. Field Crops Res. 2018, 221, 98–107. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Santos, L.M.; Ferraz, G.A.S.; Barbosa, B.D.S.; Andrade, A.D. Use of remotely piloted aircraft in precision agriculture: A review. Dyna 2019, 86, 284–291. [Google Scholar] [CrossRef]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A technical study on UAV characteristics for precision agriculture applications and associated practical challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Nemmaoui, A.; Aguilar, F.J.; Aguilar, M.A.; Qin, R. DSM and DTM generation from VHR satellite stereo imagery over plastic covered greenhouse areas. Comput. Electron. Agric. 2019, 164, 104903. [Google Scholar] [CrossRef]
- Akturk, E.; Altunel, A.O. Accuracy assessment of a low-cost UAV derived digital elevation model (DEM) in a highly broken and vegetated terrain. Meas. J. Int. Meas. Confed. 2019, 136, 382–386. [Google Scholar] [CrossRef]
- Mukherjee, A.; Misra, S.; Raghuwanshi, N.S. A survey of unmanned aerial sensing solutions in precision agriculture. J. Netw. Comput. Appl. 2019, 148, 102461. [Google Scholar] [CrossRef]
- Iticha, B.; Takele, C. Digital soil mapping for site-specific management of soils. Geoderma 2019, 351, 85–91. [Google Scholar] [CrossRef]
- Santana, L.S.; Ferraz, G.A.e.S.; Marin, D.B.; Faria, R.d.O.; Santana, M.S.; Rossi, G.; Palchetti, E. Digital Terrain Modelling by Remotely Piloted Aircraft: Optimization and Geometric Uncertainties in Precision Coffee Growing Projects. Remote Sens. 2022, 14, 911. [Google Scholar] [CrossRef]
- Marchi, E.C.S.; Campos, K.P.; Corrêa, J.B.D.; Guimarães, R.J.; Souza, C.A.S. Sobrevivência de mudas de cafeeiro produzidas em sacos plásticos e tubetes no sistema convencional e plantio direto, em duas classes de solo. Ceres 2003, 50, 407–416. [Google Scholar]
- Solos, E. Sistema Brasileiro de Classificação de Solos, 2nd ed.; Centro Nacional de Pesquisa de Solos: Rio de Janeiro, Brazil, 2006; p. 306. [Google Scholar]
- Esri, R. ArcGIS Desktop; Environmental Systems Research Institute: Redlands, CA, USA, 2016. [Google Scholar]
- Hutchinson, M.F. A new procedure for gridding elevation and stream line data with automatic removal of spurious pits. J. Hydrol. 1989, 106, 211–232. [Google Scholar] [CrossRef]
- Oikonomou, C.; Stathopoulou, E.K.; Georgopoulos, A. Contemporary data acquisition technologies for large scale mapping. In Proceedings of the 35th EARSeL Symposium–European Remote Sensing: Progress, Challenges and Opportunities, Stockholm, Sweden, 15–18 June 2015. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Zanetti, J.; Braga, F.L.S.; Dos Santos, A.d.P. Comparativo das normas de controle de qualidade posicional de produtos cartográficos do Brasil, da ASPRS e da OTAN. Rev. Bras. Cartogr. 2018, 70, 359–390. [Google Scholar] [CrossRef]
- Mora, O.E.; Chen, J.; Stoiber, P.; Koppanyi, Z.; Pluta, D.; Josenhans, R.; Okubo, M. Accuracy of stockpile estimates using low-costsUAS photogrammetry. Int. J. Remote Sens. 2020, 41, 4512–4529. [Google Scholar] [CrossRef]
- American Society for Photogrammetry and Remote Sensing (ASPRS). ASPRS Positional Accuracy Standards for Digital Geospatial Data. Photogramm. Eng. Remote Sens. 2015, 81, A1–A26. [Google Scholar]
- Ghilani, C.D.; Wolf, P.R. Adjustment Computations: Spatial Data Analysis, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; pp. 326–327. [Google Scholar] [CrossRef]
- López, F.J.A. Calidad en la producción cartográfica. Mapping 2003, 84, 96–98. [Google Scholar]
- Gregoire, N.; Bouillot, M. Hausdorff Distance between convex polygons. Comput. Geom. Web Proj. 1998, 8, 2008. [Google Scholar]
- Santos, A.D.P.D.; Medeiros, N.D.G.; Santos, G.R.D.; Rodrigues, D.D. Controle de qualidade posicional em dados espaciais utilizando feições lineares. Bol. De Ciências Geodésicas. 2015, 21, 233–250. [Google Scholar] [CrossRef] [Green Version]
- Elmasri, R.; Navathe, S.B. Fundamentals of Database Systems, 7th ed.; University of Texas at Arlington Georgia Institute of Technology: Arlington, TX, USA, 2016; p. 1280. [Google Scholar]
- Butler, H.; Daly, M.; Doyle, A.; Gillies, S.; Hagen, S.; Schaub, T. The geojson format. Internet Eng. Task Force (IETF) 2016, RFC 7946, 1–28. [Google Scholar]
- Butler, H.; Daly, M.; Doyle, A.; Gillies, S.; Schaub, T.; Schmidt, C. GeoJSON. Electronic. 2014. Available online: http://geojson.org (accessed on 26 May 2022).
- Pedreira, W.J.P.; de Andrade Oliveira, J.; Santos, P.S. Avaliação da Acurácia Altimétrica usando a Tecnologia VANT. Rev. Caminhos Geogr. 2020, 21, 209–222. [Google Scholar] [CrossRef]
- Gonçalves, G.A.; Mitishita, E.A. O Uso da Distância de Hausdorff como Medida de Similaridade em Sistemas Automáticos de Atualização Cartográfica. Bol. Ciências Geodésicas. 2016, 22, 719–735. [Google Scholar] [CrossRef] [Green Version]
- Martos, V.; Ahmad, A.; Cartujo, P.; Ordoñez, J. Ensuring agricultural sustainability through remote sensing in the era of agriculture 5.0. Appl. Sci. 2021, 11, 5911. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Intervals of Difference among DEMs (m) | Area 1 (%) | Area 2 (%) | Area 3 (%) | Area 4 (%) |
|---|---|---|---|---|
| ≤0.065 | 23.50 | 25.23 | 55.76 | 84.99 |
| 0.066–0.135 | 36.50 | 69.43 | 38.66 | 14.03 |
| 0.136–0.270 | 38.86 | 5.33 | 5.58 | 0.84 |
| 0.271–0.500 | 1.14 | 0.01 | 0.00 | 0.14 |
| ≥0.501 | 0.00 | 0.00 | 0.00 | 0.00 |
| Slope Difference Intervals (%) | Area 1 (%) | Area 2 (%) | Area 3 (%) | Area 4 (%) |
|---|---|---|---|---|
| ≤2.0 | 93.15 | 84.69 | 92.73 | 99.59 |
| 2.1–4.0 | 6.25 | 9.78 | 4.92 | 0.31 |
| 4.1–6.0 | 0.51 | 3.29 | 1.39 | 0.10 |
| 6.1 | 0.09 | 2.24 | 0.96 | 0.00 |
| Parameters | Area 1 | Area 2 | Area 3 | Area 4 |
|---|---|---|---|---|
| (m) | 0.032 | 0.043 | 0.029 | 0.018 |
| (m) | 0.019 | 0.037 | 0.019 | 0.008 |
| . (m) | 0.078 | 0.112 | 0.071 | 0.036 |
| . (m) | 0.010 | 0.000 | 0.000 | 0.010 |
| RMSEx (m) | 0.027 | 0.035 | 0.029 | 0.014 |
| RMSEy (m) | 0.025 | 0.044 | 0.018 | 0.014 |
| RMSEr (m) | 0.037 | 0.057 | 0.035 | 0.020 |
| Parameters | Area 1 | Area 2 | Area 3 | Area 4 |
|---|---|---|---|---|
| (m) | 0.046 | −0.003 | 0.039 | 0.022 |
| (m) | 0.056 | 0.065 | 0.048 | 0.033 |
| . (m) | 0.210 | 0.140 | 0.150 | 0.090 |
| . (m) | −0.050 | −0.100 | −0.050 | −0.040 |
| RMSEz (m) | 0.071 | 0.063 | 0.061 | 0.039 |
| Parameters | Area 1 | Area 2 | Area 3 | Area 4 |
|---|---|---|---|---|
| Horizontal accuracy (m) | 0.064 | 0.099 | 0.061 | 0.035 |
| Vertical accuracy (m) | 0.139 | 0.123 | 0.120 | 0.076 |
| Contour Line Elevation (m) | Hausdorff Distance (m) | Contour Line Elevation (m) | Hausdorff Distance (m) | ||
|---|---|---|---|---|---|
| Area 1 | Area 2 | Area 3 | Area 4 | ||
| 857 | - | 0.573 | 13 | 1.046 | - |
| 858 | - | 0.382 | 14 | 2.005 | 0.983 |
| 859 | - | 0.448 | 15 | 1.570 | 1.400 |
| 860 | - | 0.448 | 16 | 2.247 | 0.290 |
| 861 | - | 0.424 | 17 | 3.102 | 0.238 |
| 862 | - | 0.354 | 18 | 1.372 | 0.187 |
| 863 | 1.275 | 0.416 | 19 | 2.808 | 0.223 |
| 864 | 1.096 | 0.334 | 20 | 2.083 | - |
| 865 | 0.535 | 0.388 | 21 | 2.861 | - |
| 866 | 0.663 | 0.262 | 22 | 1.677 | - |
| 867 | 0.545 | 0.352 | 23 | 3.011 | - |
| 868 | 0.765 | 0.258 | - | - | - |
| 869 | 0.600 | 0.218 | - | - | - |
| 870 | 0.547 | 0.249 | - | - | - |
| 871 | 0.637 | - | - | - | - |
| 872 | 0.560 | - | - | - | - |
| 873 | 0.551 | - | - | - | - |
| 874 | 0.491 | - | - | - | - |
| 875 | 0.572 | - | - | - | - |
| 876 | 0.841 | - | - | - | - |
| 877 | 0.581 | - | - | - | - |
| 878 | 0.592 | - | - | - | - |
| 879 | 0.331 | - | - | - | - |
| 880 | 0.437 | - | - | - | - |
| 881 | 0.295 | - | - | - | - |
| Parameters | Area 1 | Area 2 | Area 3 | Area 4 |
|---|---|---|---|---|
| (m) | 0.627 | 0.365 | 2.162 | 0.554 |
| (m) | 0.235 | 0.097 | 0.707 | 0.512 |
| . (m) | 1.275 | 0.573 | 3.102 | 1.400 |
| . (m) | 0.295 | 0.218 | 1.046 | 0.187 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Freire, A.A.R.; Antunes, M.A.H.; de Barros, M.M.; de Souza, W.D.; de Sousa da Silva, W.; de Souza, T.M. Similarity Analysis between Contour Lines by Remotely Piloted Aircraft and Topography Using Hausdorff Distance: Application on Contour Planting. Remote Sens. 2022, 14, 3269. https://doi.org/10.3390/rs14143269
Freire AAR, Antunes MAH, de Barros MM, de Souza WD, de Sousa da Silva W, de Souza TM. Similarity Analysis between Contour Lines by Remotely Piloted Aircraft and Topography Using Hausdorff Distance: Application on Contour Planting. Remote Sensing. 2022; 14(14):3269. https://doi.org/10.3390/rs14143269
Chicago/Turabian StyleFreire, Alexandre Araujo Ribeiro, Mauro Antonio Homem Antunes, Murilo Machado de Barros, Wagner Dias de Souza, Wesley de Sousa da Silva, and Thaís Machado de Souza. 2022. "Similarity Analysis between Contour Lines by Remotely Piloted Aircraft and Topography Using Hausdorff Distance: Application on Contour Planting" Remote Sensing 14, no. 14: 3269. https://doi.org/10.3390/rs14143269