1. Introduction
Harmonic radar, or nonlinear radar, is a radio frequency (RF) wave-based surveillance technology that exploits re-radiation of RF waves at harmonic frequencies from nonlinear targets [
1,
2]. Most man-made targets, such as electronic devices and mechanical metal structures, are nonlinear targets. Mechanical metal structures contain metal–metal junctions, whereas electronic devices contain nonlinear circuit components such as diodes, semiconductors, mixers, amplifiers, transistors, etc. Both metal–metal junctions and nonlinear circuit components exhibit nonlinear current–voltage (I–V) relationships that cause the re-radiation of RF waves at harmonic frequencies of the incident wave [
3,
4,
5,
6,
7,
8]. The re-radiated RF wave from a nonlinear target depends on the harmonic characteristics of the target, which can be utilized to detect, track, and classify this type of target using harmonic radar [
9,
10]. One of the significant advantages of harmonic radar is its high clutter rejection; it utilizes re-radiated RF waves at the harmonic frequencies of the transmitted frequency, while echoes and clutter are due to natural obstacles which do not result in re-radiation of RF waves at the harmonic frequencies of the transmitted signal [
11,
12]. In addition, harmonic radar has the potential to yield more information about the target by exploiting re-radiated RF signals at the harmonic frequencies of the transmitted signal with varying power and frequency [
2,
9]. On the other hand, one of the main challenges in harmonic radar is that the re-radiated signal power at the harmonic frequencies is weak, and thus the signal-to-noise ratio (SNR) on the receiver side is low [
13]. In addition, highly sensitive components are used at the receiver, and thus the performance of the system is decreased in the presence of Radio Frequency Interference (RFI) [
14].
Exploiting re-radiated signals at harmonic frequencies allows harmonic radar to be used in a wide variety of applications. In agriculture, harmonic radar is employed to avoid crop damage by insects [
15,
16,
17,
18,
19,
20,
21,
22]. Nonlinear compatible tags are placed on insects to track and distinguish them from clutter-rich environments using harmonic radar. In the automotive industry, nonlinear tags are mounted on automobiles and people to prevent fatal accidents by identifying high-risk targets using harmonic radar [
23]. Moreover, locating buried assets is another application of harmonic radar. Water supplies and energy resources such as natural gas and refined petroleum are transported through underground pipelines. It is difficult to determine the positions of these pipelines accurately in urban areas, and thus harmonic Radio Frequency Identification (RFID) tags are used for detecting the locations of the complex underground pipeline network [
24], minimizing accidental breakage of pipelines during excavation. Harmonic RFID systems are applicable in these and many other sensing applications, as they provide low self-jamming, accurate location information, and high resistance to phase noise [
25]. In addition, harmonic radar has unique usage in security and military applications such as detecting hidden improvised explosive devices, weapons, and other man-made objects in clutter-rich environments [
4,
26,
27,
28].
Detecting electronic targets is one of the most popular applications of harmonic radar. The re-radiated signal from nonlinear devices is analyzed by transmitting different types of waveforms to the targets. Transmitting a single-tone waveform to the device under test and analyzing the harmonics of the fundamental frequency are commonly-used techniques in harmonic radar [
9,
10,
11,
15,
16,
17,
18,
19,
29,
30,
31,
32,
33]. Another method is to transmit a two-tone signal to the targets and analyze both the harmonics and intermodulation terms of the transmitted frequencies [
4,
10,
23,
33,
34]. This technique allows for use of a receiver with a narrower bandwidth [
5]. Furthermore, multi-tone signals can be transmitted to targets simultaneously in order to detect and discriminate them when using a narrow-bandwidth receiver [
5,
11,
34]. In addition, both the magnitude and phase information are exploited using intermodulation terms, which are helpful in determining the unambiguous range of the target [
34]. A simultaneous-frequency harmonic radar has been demonstrated in [
34,
35] for distinguishing two electronic targets. Furthermore, linear frequency-modulated chirp signals [
11,
12,
33,
34,
36] and stepped-frequency pulses [
11,
12,
33,
34,
37,
38,
39] have been transmitted to targets, enabling both their detection and determination of the range to the targets. Moreover, in [
40], a carrier modulation technique was exploited to detect electronic devices remotely using harmonic radar. While the radar transmits a single frequency, the nonlinear target emits intermodulation products of both the transmitted frequency and the device’s emission.
Although several studies have focused on detecting, ranging, and tracking of electronic devices, there have been only a few studies about distinguishing and classifying electronic devices using harmonic radar. For the first time in the literature, multiple electronic devices are characterized here as nonlinear targets with certain features using harmonic radar in an experimental setup where targets are moved in cross and down ranges, changing the distance to the receiving antennas [
41]. Sixteen receiving antennas were used to collect the harmonic responses of these targets in order to create different realizations. Later, single-tone signals with varying power were transmitted to the electronic circuits under test (ECUT) in order to distinguish and classify different types of electronic devices. In [
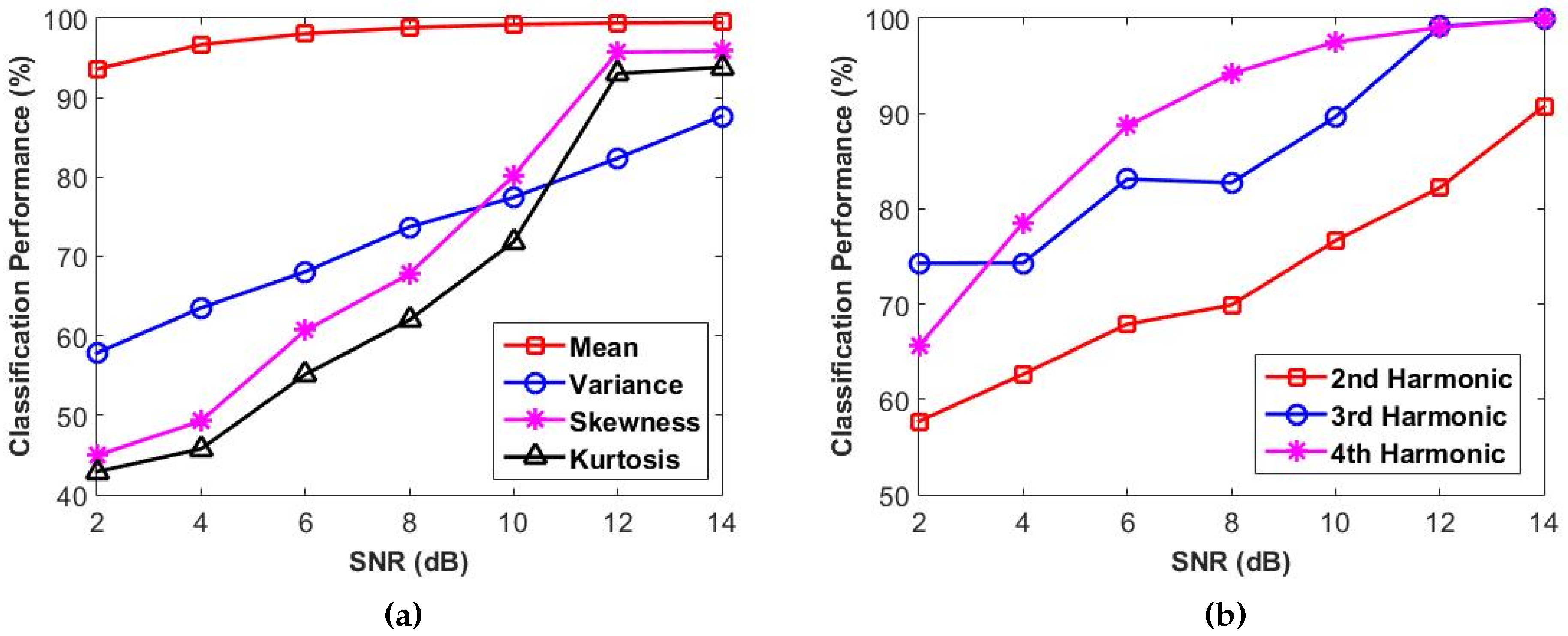
29], statistical features such as mean, variance, skewness, and kurtosis were introduced and exploited to distinguish electronic devices by applying power-swept input signals. Received powers at the second, third, and fourth harmonics were analyzed and the Euclidean distances of the statistical features were used to measure the performance of the distinguishing the circuits. In [
30], energy levels at the low, middle, and high frequencies of the Fourier transformations of the received power curves at the second, third, and fourth harmonic frequencies were exploited for classification. In [
9], the received power values at the second, third, and fourth harmonics were exploited to classify various electronic devices using their statistical and Fourier features in the presence of noise. A linear model was developed and employed in order to estimate the unknown deterministic vector of parameters to be used in distinguishing ECUTs via single-tone transmission case [
31]. This newly-developed linear model represents the measurements in terms of an observation matrix and a deterministic vector of parameters in an analytical aspect. Furthermore, in [
10], single-tone and two-tone incident signals were transmitted to the ECUTs in order to classify the devices using the same linear model.
Previous studies in the literature have shown that electronic devices with nonlinear circuit components such as diodes, semiconductors, mixers, amplifiers, transistors, etc. can be distinguished and classified by exploiting the harmonic characteristics of these devices, which can be obtained by a harmonic radar receiving the re-radiated wave from these targets [
9,
10,
12,
29,
30,
31,
41]. In this study, we develop a novel method to classify various electronic devices using a frequency-swept harmonic radar (FSHR) approach to exploit frequency diversity, unlike previous studies where either power diversity or spatial diversity was exploited. The harmonic characteristics of the ECUTs are conceived using statistical features such as variance, skewness, and kurtosis. In addition, we derive the Fourier features [
9] in order to characterize the ECUTs.
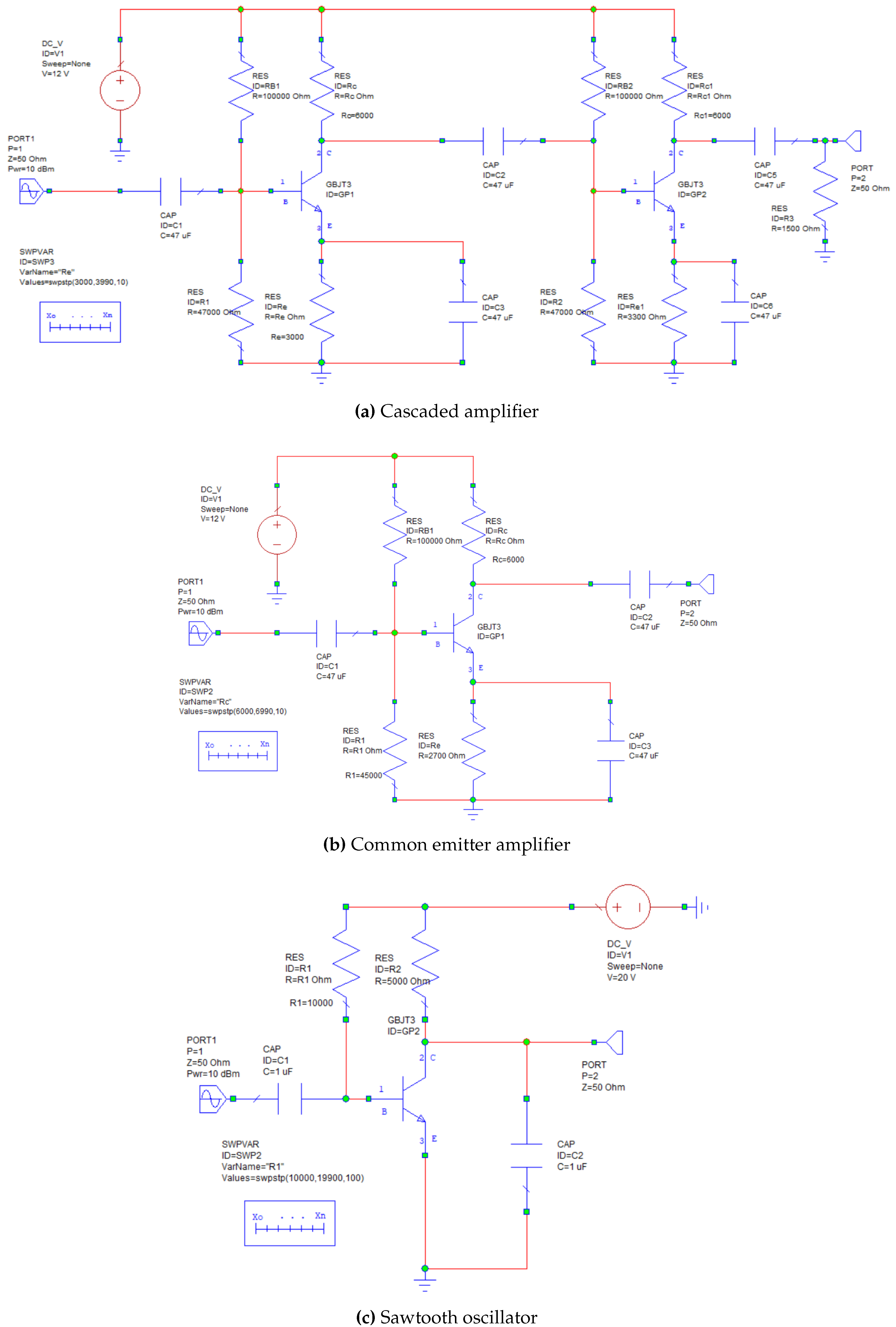
In this paper, three types of electronic devices are classified using a FSHR approach through simulation: a cascaded amplifier, a common emitter amplifier and a sawtooth oscillator. Common emitter amplifiers are one of the most commonly used configuration types in audio frequency (AF) and radio frequency (RF) applications; they both increase the signal strength and provide 180
phase shifting of the input [
42,
43]. Cascaded amplifiers are multi-stage systems which are used to improve the amplification and attain high gains. Audio amplifiers and RF amplifiers, which require high gain to operate properly, consist of cascaded systems [
44]. Sawtooth oscillators are a commonly used oscillator type that can produce sawtooth waveforms from square waves applied to the input. Electronic systems such as control systems, automatic test equipment, and instruments use sawtooth waveforms [
45]. Circuit schematics of each type are presented in
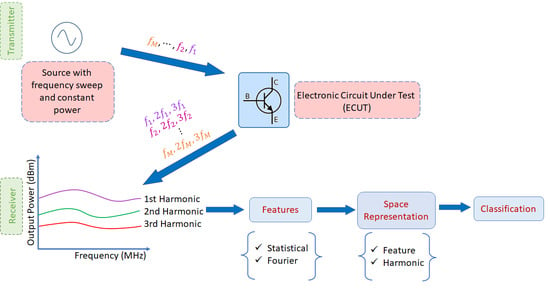
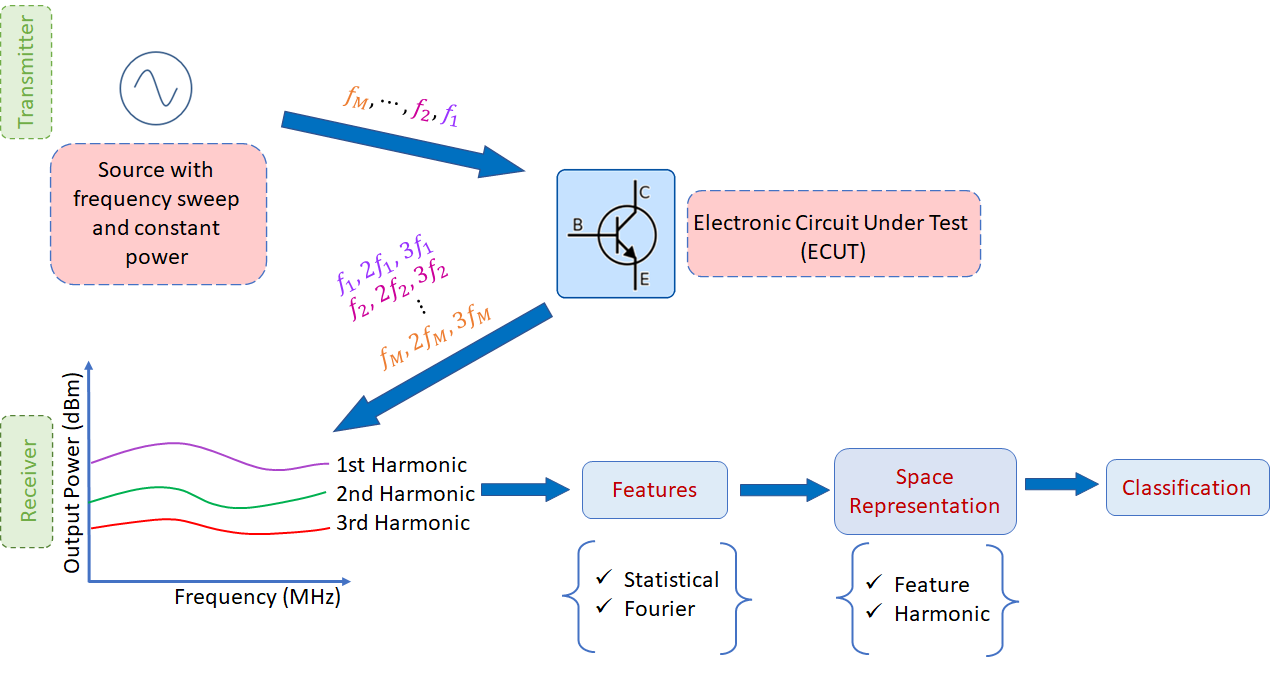
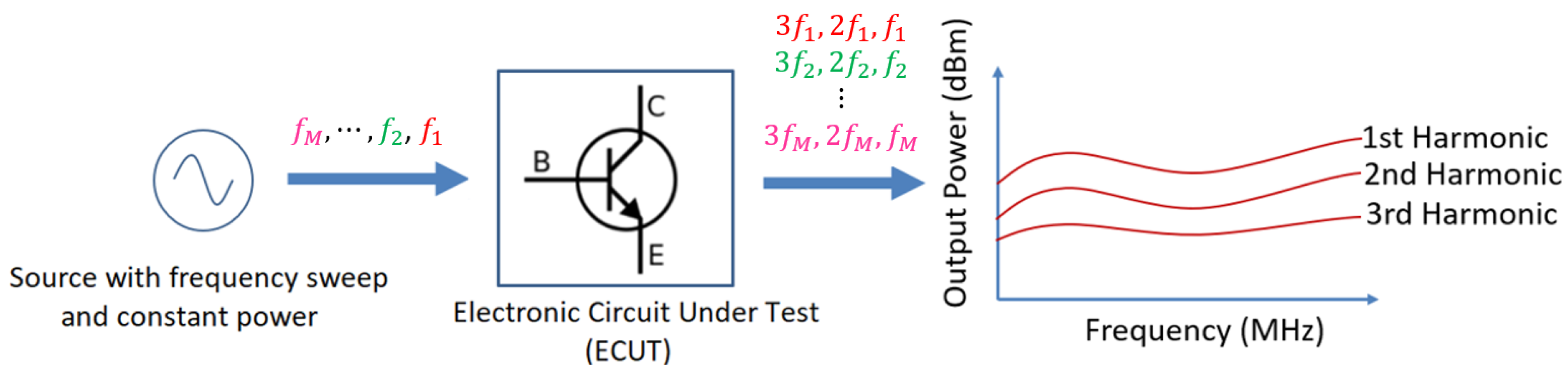
Figure 1. A set of a large number of circuits was tested for each device type. A frequency-swept signal with a constant power was transmitted to ECUTs and the received signal powers at the first, second, and third harmonics were analyzed using simulations, as illustrated in
Figure 2. The frequency of the transmitted signal with a constant power value was swept across a wide bandwidth. A signal with the frequency values in this specified range was transmitted to the ECUTs sequentially. Afterward, the statistical and Fourier features of the harmonic responses were analyzed. A kNN (k-Nearest Neighbors) algorithm was utilized to classify the ECUTs. We performed realistic Monte Carlo simulations with additive noise.
The organization of this paper is as follows. In
Section 2, the proposed method and background information of this study are briefly explained. In
Section 3, the features that we exploited to characterize the harmonic responses of the nonlinear circuits are described. In
Section 4, the simulation setup, design of the ECUTs, and their simulated harmonic responses are presented. In
Section 5, the classification performance analysis and confusion matrices used to evaluate the effectiveness of the proposed method are presented. In addition, a performance comparison with other relevant studies in the literature is provided. Finally, in
Section 6, concluding remarks are provided and future works addressed.
2. Frequency-Swept Harmonic Radar Approach
In harmonic radar phenomena, after a transmitted wave hits a nonlinear target, re-radiation occurs due to the currents induced over the nonlinear target at the harmonic frequencies of the incident wave. We simulate the received signals at the harmonic frequencies based on the currents induced at the harmonic frequencies of the transmitted signal. The re-radiated signal from a nonlinear target includes both the transmitted frequency and integer multiples of the fundamental frequency. On the other hand, the response of a linear target includes only the fundamental frequency components [
11]. This is the main starting point for harmonic radar studies. The re-radiated signal from a nonlinear device, in other words, the harmonic response, is represented by a Taylor series model [
2,
3,
41]:
where
denotes the re-radiated signal from the nonlinear target,
represents the incident signal to the target, the
s are the complex power series coefficients, the linear response of the target is
, and the nonlinear coefficients of the harmonics are
.
In this study, the nonlinear characteristics of the circuits are captured by sweeping the frequency of the transmitted signal within a determined range which is a novel approach. Because the re-radiated signals at higher-order harmonic frequencies are weak, the resulting signals of first three harmonics are utilized to classify the ECUTs.
A frequency-swept zero-phase input signal can be expressed as
where
is the magnitude of the transmitted signal and
is the instantaneous transmitted frequency. It is important to note that
M frequencies are transmitted to the targets sequentially, not simultaneously with a predetermined step size.
The re-radiated signal from the target can be obtained by substituting (
2) into (
1). The re-radiated signals of the first, second, and third order harmonics are approximately equal to
where
.
The re-radiation of signals at the harmonics of the transmitted frequency is due to the harmonic characteristics of the target nonlinear devices. Different types of electronic devices have distinctive harmonic characteristics, whereas similar types of devices have similar harmonic characteristics. These unique characteristics of electronic devices are essential to devising descriptive features in order to classify them. Thus, exploiting the harmonics of re-radiated signals enables us to classify various electronic circuits.
4. Simulations
Three different classes of electronic devices, namely, a cascaded amplifier, common emitter amplifier and sawtooth oscillator, were designed in order to analyze the performance of the proposed method. The main nonlinear circuit component that causes harmonic re-radiation in these electronic circuits is the Bipolar Junction Transistor (BJT). The received signal powers at the harmonics were collected using a Harmonic Balance simulator tool in the Cadence AWR Microwave Office Program. AWR enabled us to gather harmonic responses, as would be the case in a real life scenario. Therefore, real-life issues such as the coupling between the elements of the ECUTs and other possible sources of nonlinear responses were all collectively and intrinsically present in the responses that we analyze here. Antennas and free space propagation were not considered in the simulation setup. However, the features in the proposed method do not depend on antennas or free space propagation in the proposed scheme. Although this technique is demonstrated here with certain classes of electronic circuits, it can be utilized in other classes of electronic circuits (devices) that cause harmonic re-radiation upon a transmitted signal.
Schematics of each class of electronic circuits under test are presented in
Figure 1. We created a data set of 100 circuits for each 3 different circuit types using Swept Variable Control (SWPVAR) in the AWR Microwave Office Program. The values of randomly selected components were swept to create a set of different circuits for each device type. The device types and their variations were chosen randomly, as the devices to be detected and classified in real life will not be known. While the purpose here was only to collect harmonic responses from all sets of the circuits, this study can be applied to any type of nonlinear circuit.
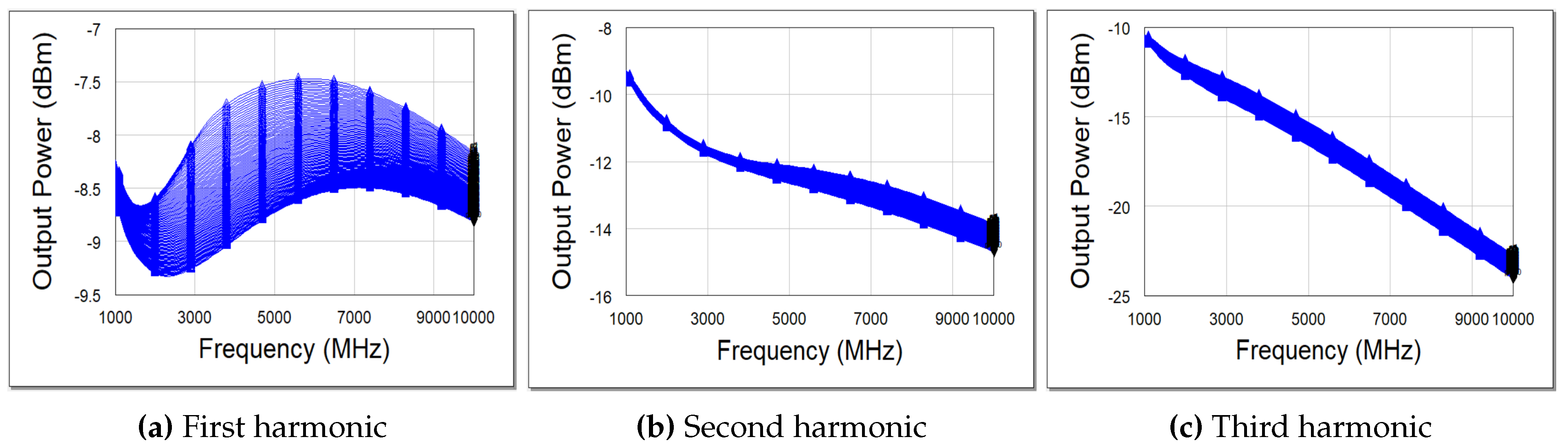
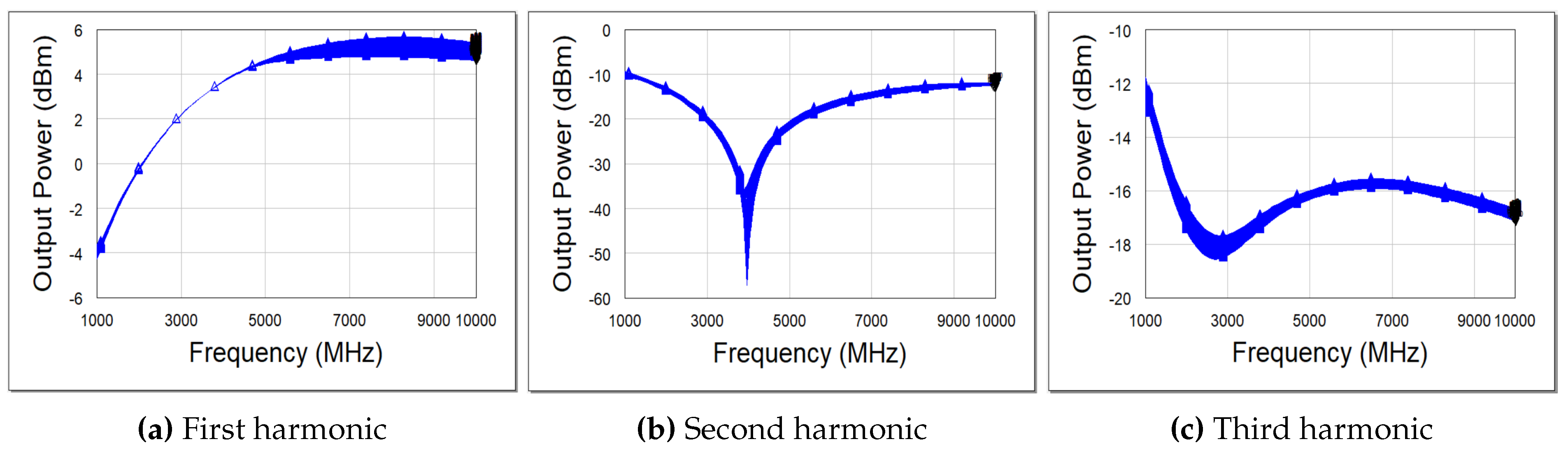
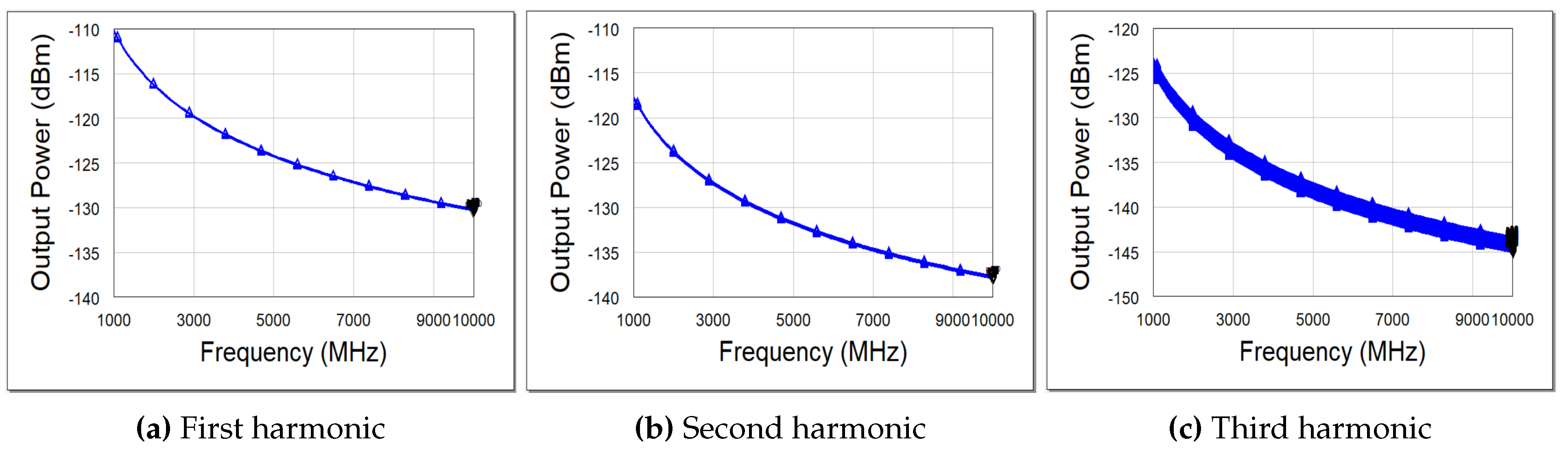
A 10 dBm of constant input power with a frequency-swept signal was transmitted to the nonlinear electronic circuits. We swept the input frequency from 1000 MHz to 10,000 MHz in 90 MHz steps to observe the nonlinear characteristics of the ECUTs. In this study, both the power of the transmitted signal and operating frequency range were arbitrarily chosen. However, the proposed method can be implemented using any input power and frequency range. The simulated received powers at the first, second, and third harmonics with respect to varying input frequency are presented in
Figure 3,
Figure 4 and
Figure 5. The received powers in
Figure 3,
Figure 4 and
Figure 5 are based on noise-free received harmonic signals. However, in the simulations used for performance analysis, complex white Gaussian noise (CWGN) was added to the received harmonic signals. The feature sets, which are discussed in
Section 3, were extracted in order to create a data set, then exploited to classify the ECUTs based on the received harmonic signals embedded in the CWGN.
6. Conclusions
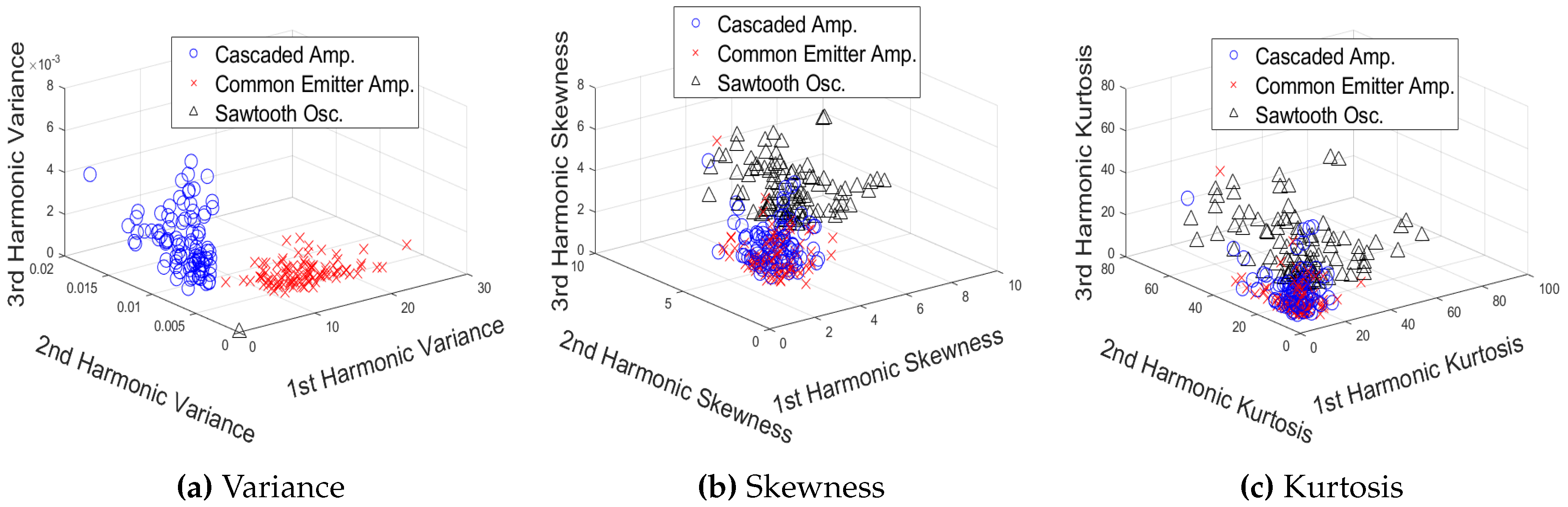
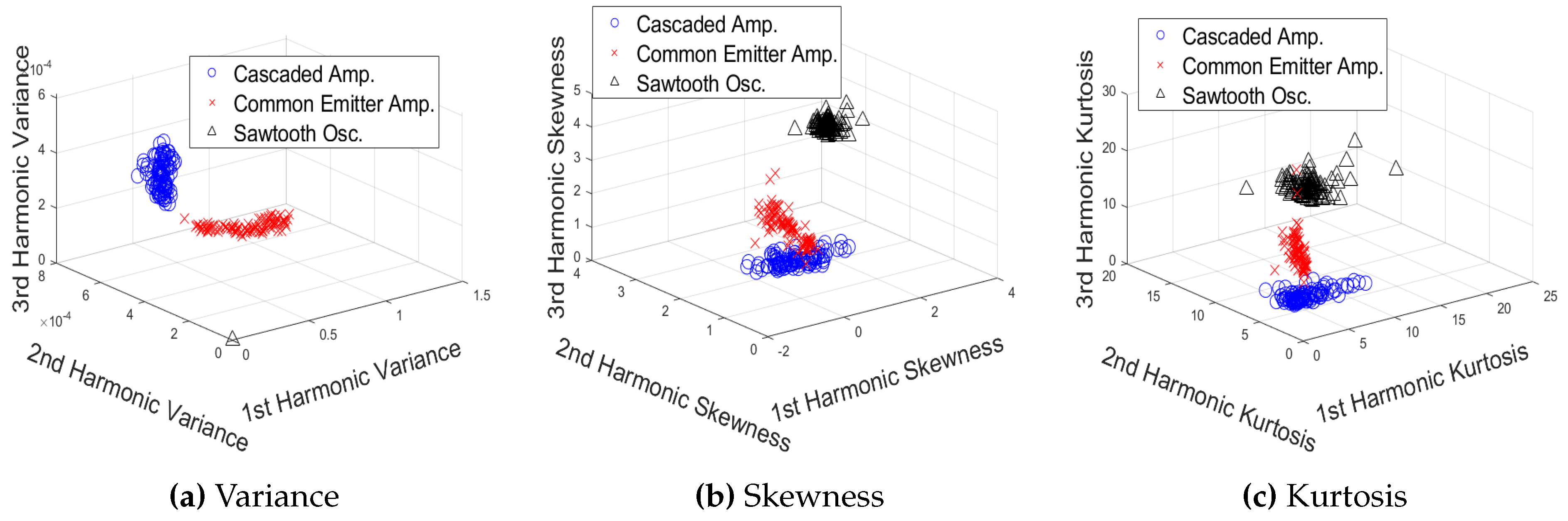
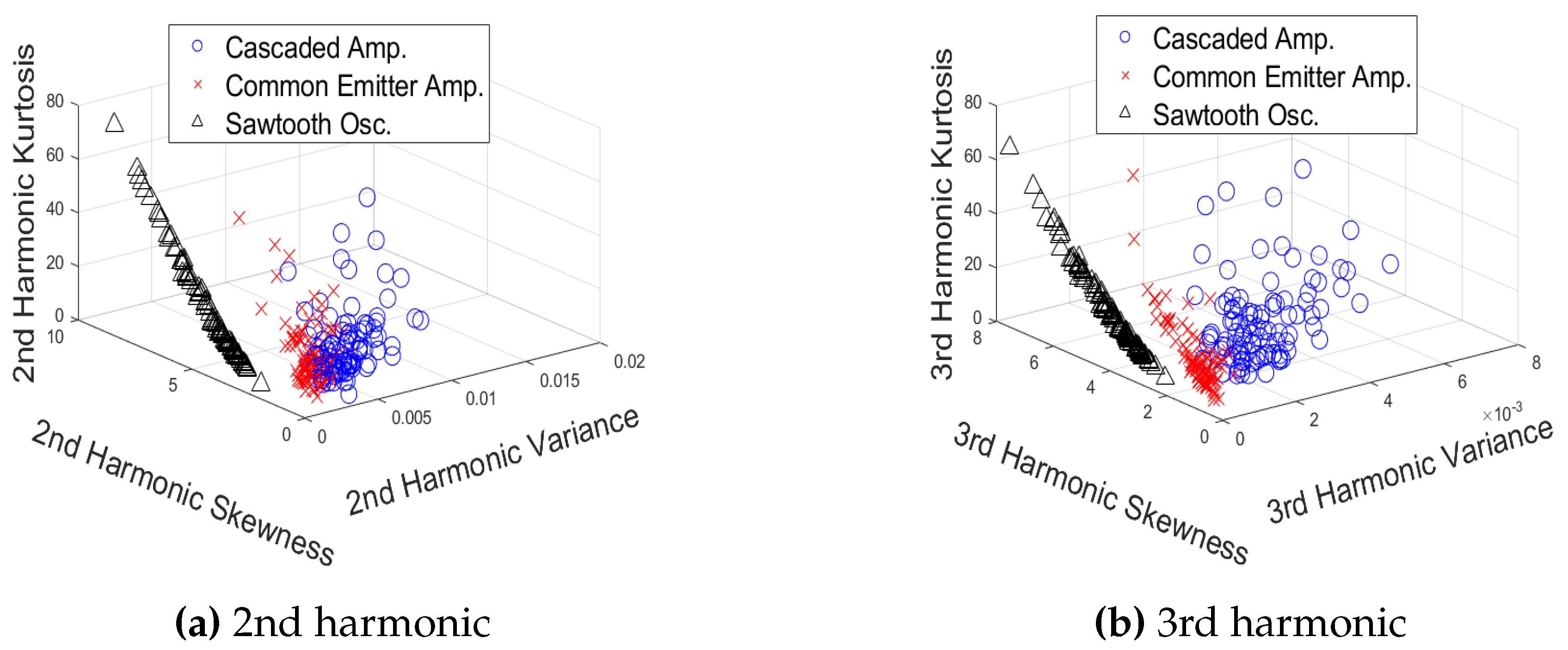
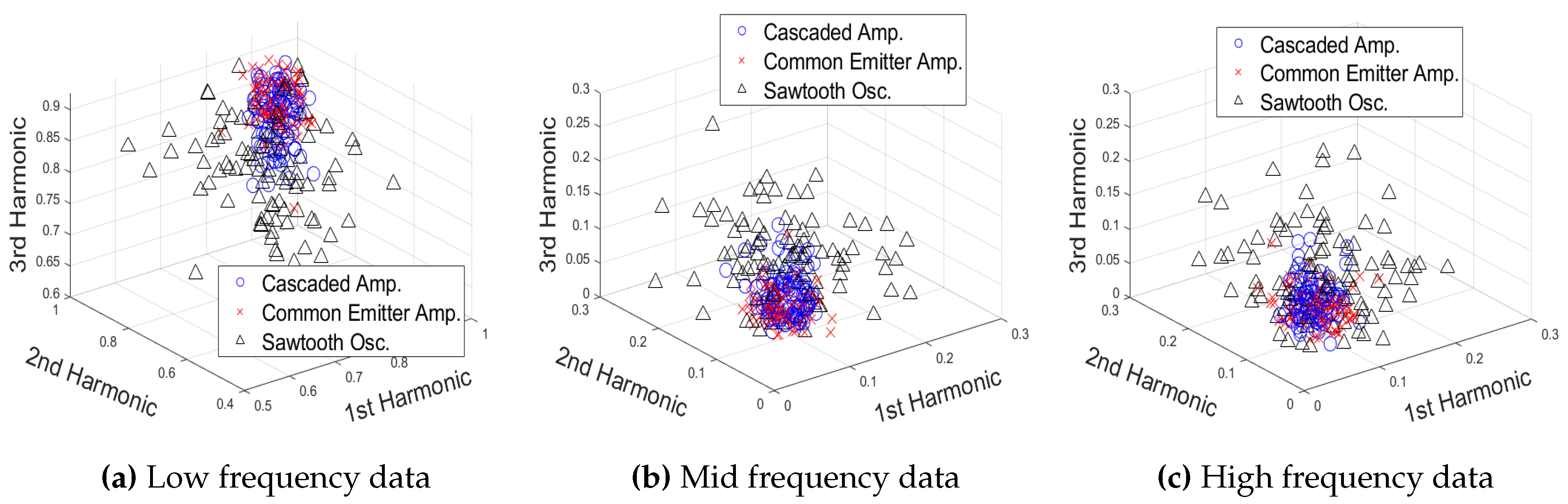
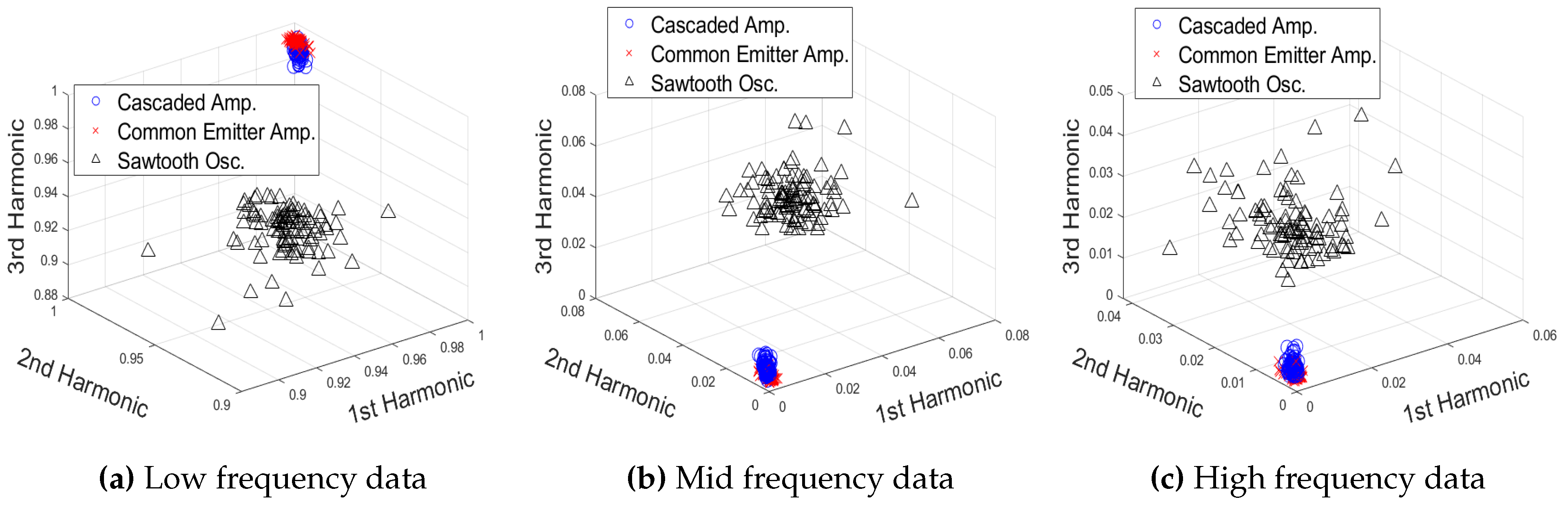
In this article, a novel method for classifying non-linear electronic circuits is presented. Various types of electronic circuits such as cascaded amplifiers, common emitter amplifiers, and sawtooth oscillators are classified using a Frequency-Swept Harmonic Radar (FSHR) approach. Unlike prior studies, signals with constant power are sequentially transmitted to the Electronic Circuits Under Test (ECUT) at frequency values which are swept across a wide range. The first, second, and third harmonic responses of the ECUTs are collected to derive statistical and Fourier features, and a k-Nearest Neighbors (kNN) algorithm is utilized to classify the ECUTs. Scatter plots of the harmonic responses are derived in both feature space and harmonic space and for different SNR values.
The nonlinear characteristics of each ECUT were captured by statistical features such as the variance, skewness, and kurtosis of the received powers at the first three harmonic frequencies. These statistical features are useful for characterizing the received signal power curves at each harmonic, which are unique for each type of ECUT. In addition, Fourier features provide the frequency content of the received powers at harmonic frequencies, and can thus be utilized to characterize the ECUTs. The energy values of the Fourier transform at different frequency levels of the received powers are assessed at the first three harmonic frequencies. Fourier features, which indicate how much of the total energy is at the relevant frequency level, are devised as distinguishing features as well.
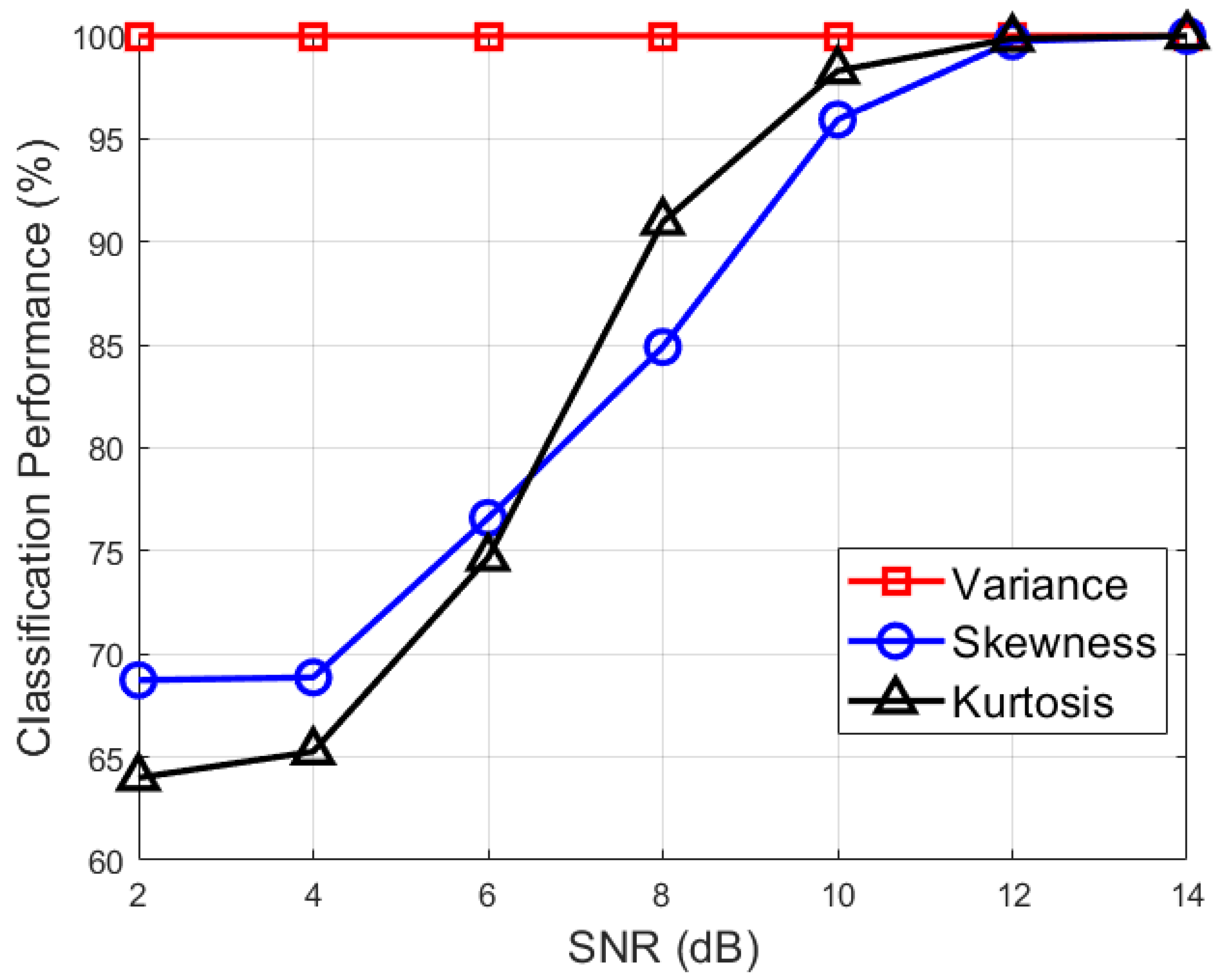
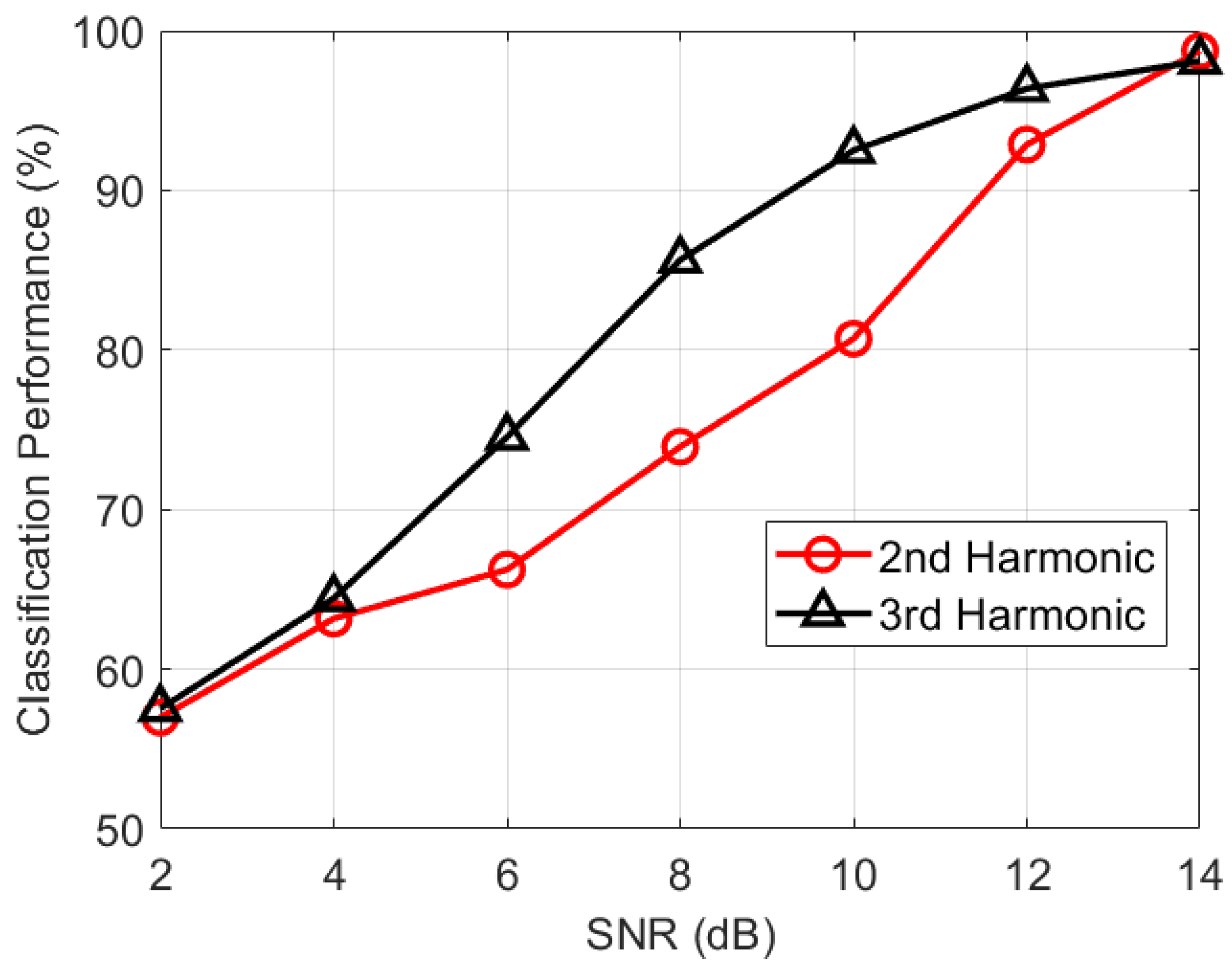
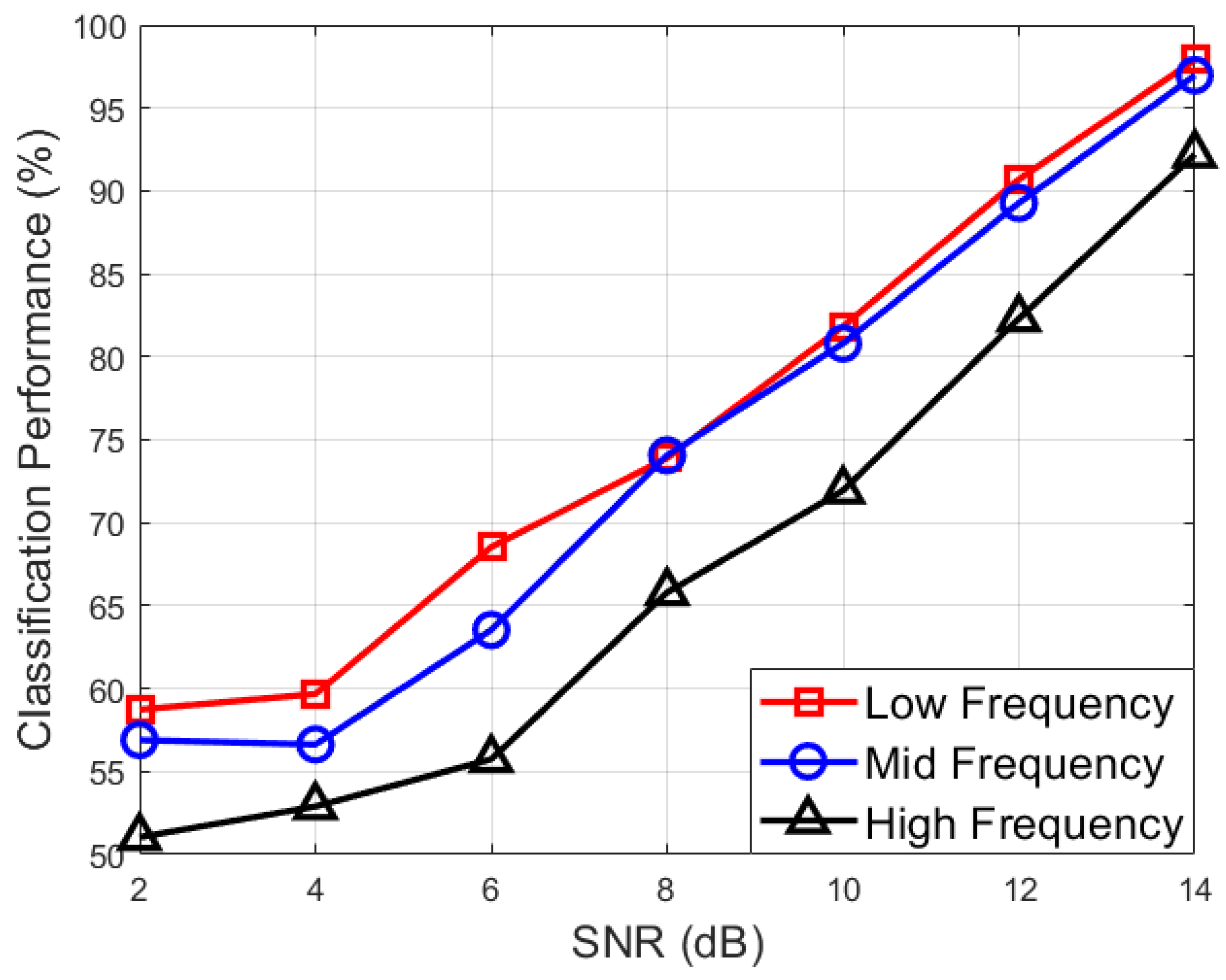
Through Monte Carlo simulations, we apply complex white Gaussian noise (CWGN) to the harmonic responses of the ECUTs for performance assessment of the FSHR approach in real life scenarios. The classification performance of both statistical and Fourier features is presented with confusion matrices and correct classification rates with varying SNR values. We observed that the proposed techniques using frequency-swept transmitted signals are promising for classifying nonlinear electronic circuits using harmonic radar. However, classification of ECUTs via harmonic radar is an emerging technique that requires broader attention in research studies. Therefore, a brief comparison between the proposed method and previous methods of nonlinear electronic circuit classification using harmonic radar found in the literature is presented in this article.
Our future work plans include transmitting different types of waveforms to the electronic circuits. In addition, our research study into acquiring the harmonic data of electronic devices using an experimental setup to test and validate our approach with real data continues. The present study can represent an inspiring reference for other researchers to further analyze the classification performance of nonlinear electronic devices with different features and classification techniques in order to enhance the classification performance in future work.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}