
Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet


Abstract
:
1. Introduction
2. Materials and Methods
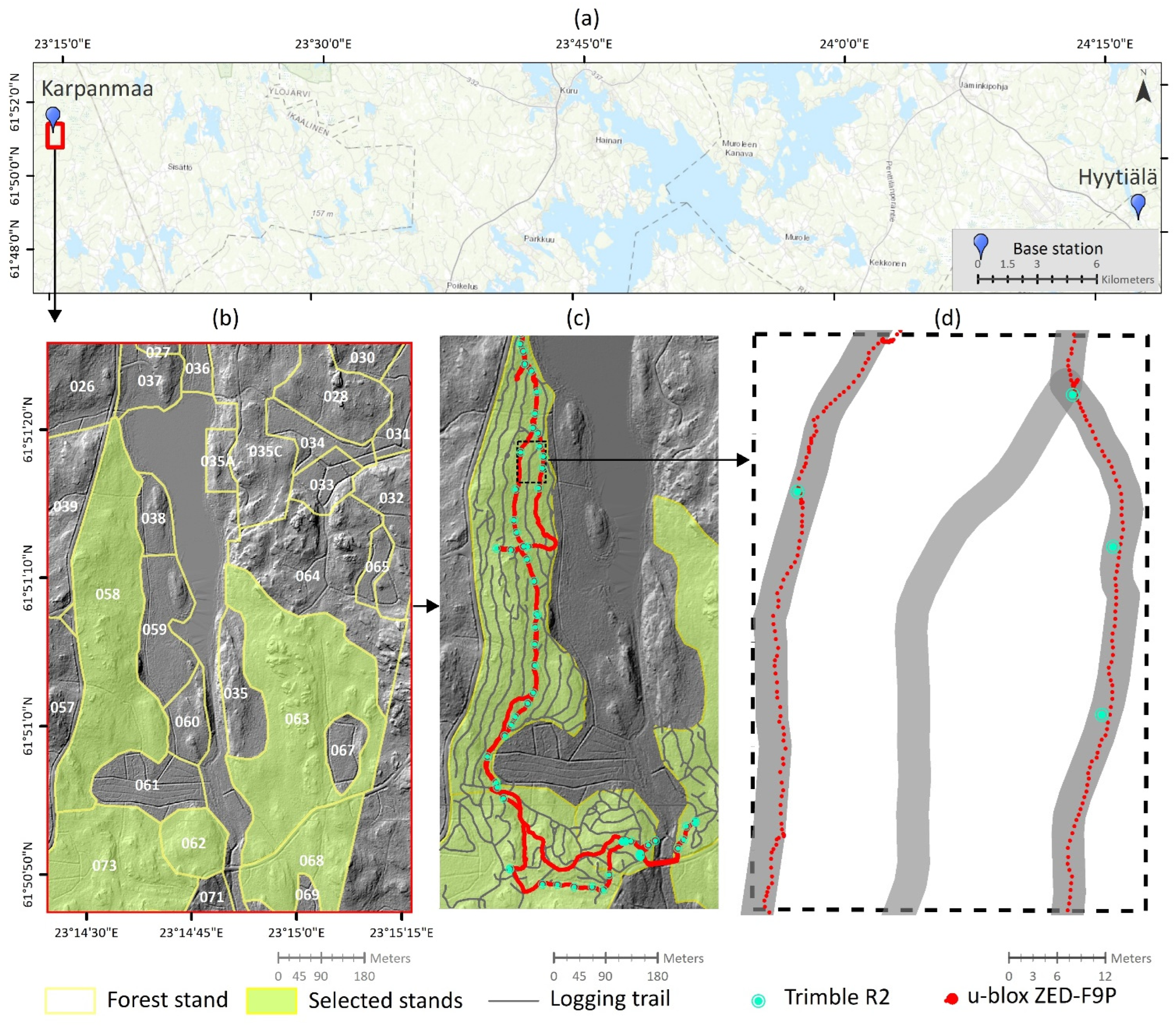
2.1. Description of the Study Area
2.2. Data
2.3. GNSS Devices
2.4. Research Sulky
2.5. Field Measurements
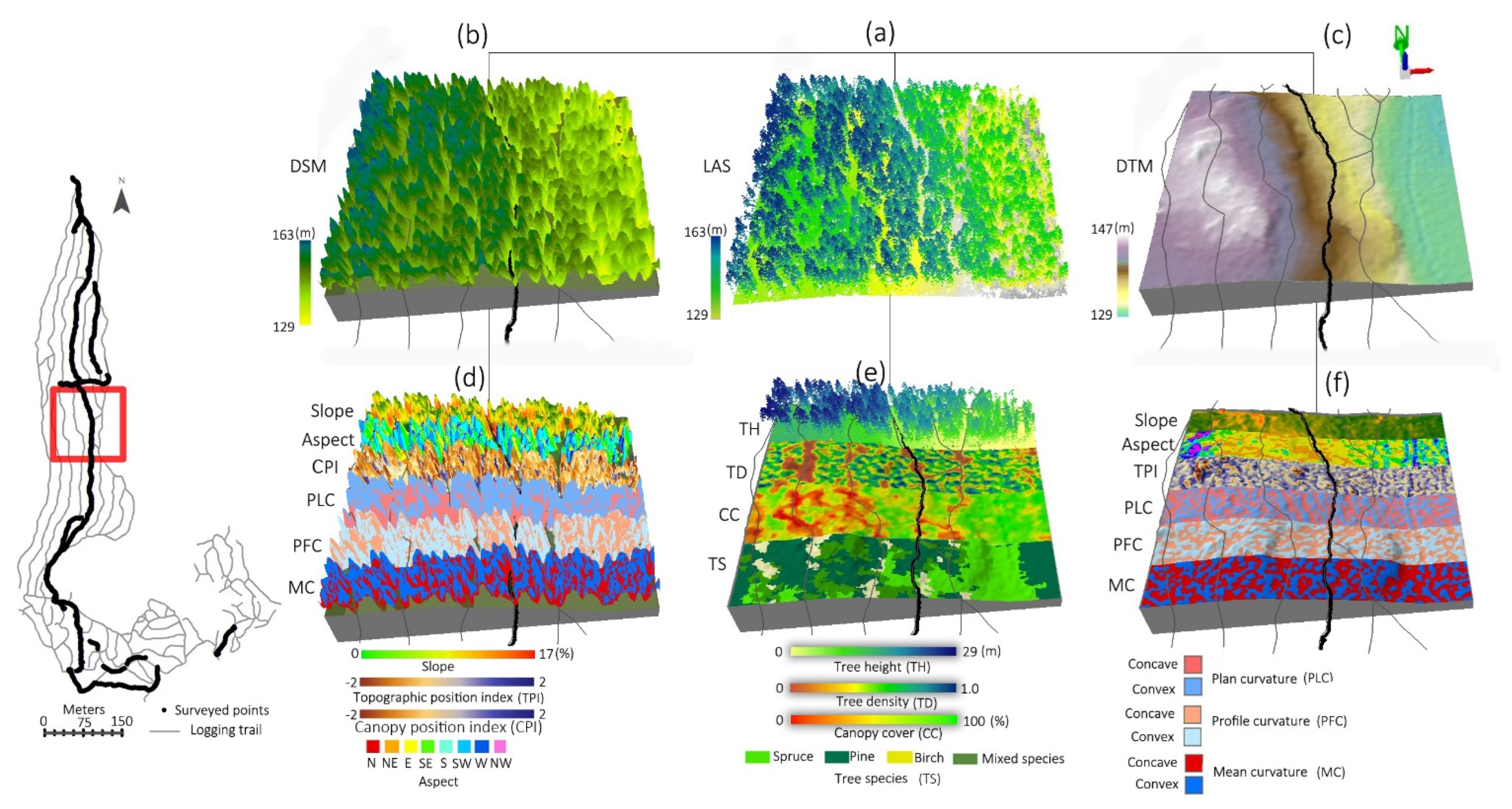
2.6. High-Density Laser Scanning Features
2.7. Object Features
2.8. TreeNet Regression

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Features | Description |
|---|---|---|
| Ground-surface/canopy-surface conditions | Elevation | The mean of ground/canopy elevation (m) [58] in an object. |
| Slope (°) | The average of maximum changes in elevation value [59] within each object. | |
| Aspect | The direction of compass of downhill slope [59] in each object. | |
| Topographic position index (TPI) | TPI measures the difference between the elevation of the central point against the average elevation of the ground surface in an object. The positive values indicate the higher elevation of the central points and vice versa [60]. | |
| Canopy position index (CPI) | CPI measures the difference between the elevation of the central point against the average elevation of the canopy surface in an object. The positive values indicate the higher elevation of the central points and vice versa. | |
| Plan curvature | The curvature of the surface (ground or canopy) perpendicular to the direction of slope. The positive values indicate the convex surface and negative values indicate the concave surface [48,49]. | |
| Profile curvature | The curvature of the surface (ground or canopy) in the direction of the maximum slope in each object. The negative values indicate the convex position and positive values indicate concave surface [48,49]. | |
| Mean curvature | The combination of the plan and profile curvatures within an object [48,49]. | |
| Tree characteristics | Canopy height | The difference between the elevation of canopy surface and ground surface in an object [50]. |
| Canopy density | The density of nonground returns of LiDAR points in an object [51]. | |
| Canopy cover | The percentage of canopy cover within an object, delineated from the CHM [52]. | |
| Species type | The type of species trees extracted from the intensity image, derived from the high-density LiDAR data and orthophoto images. |
3. Results
3.1. The Accuracy of Positions
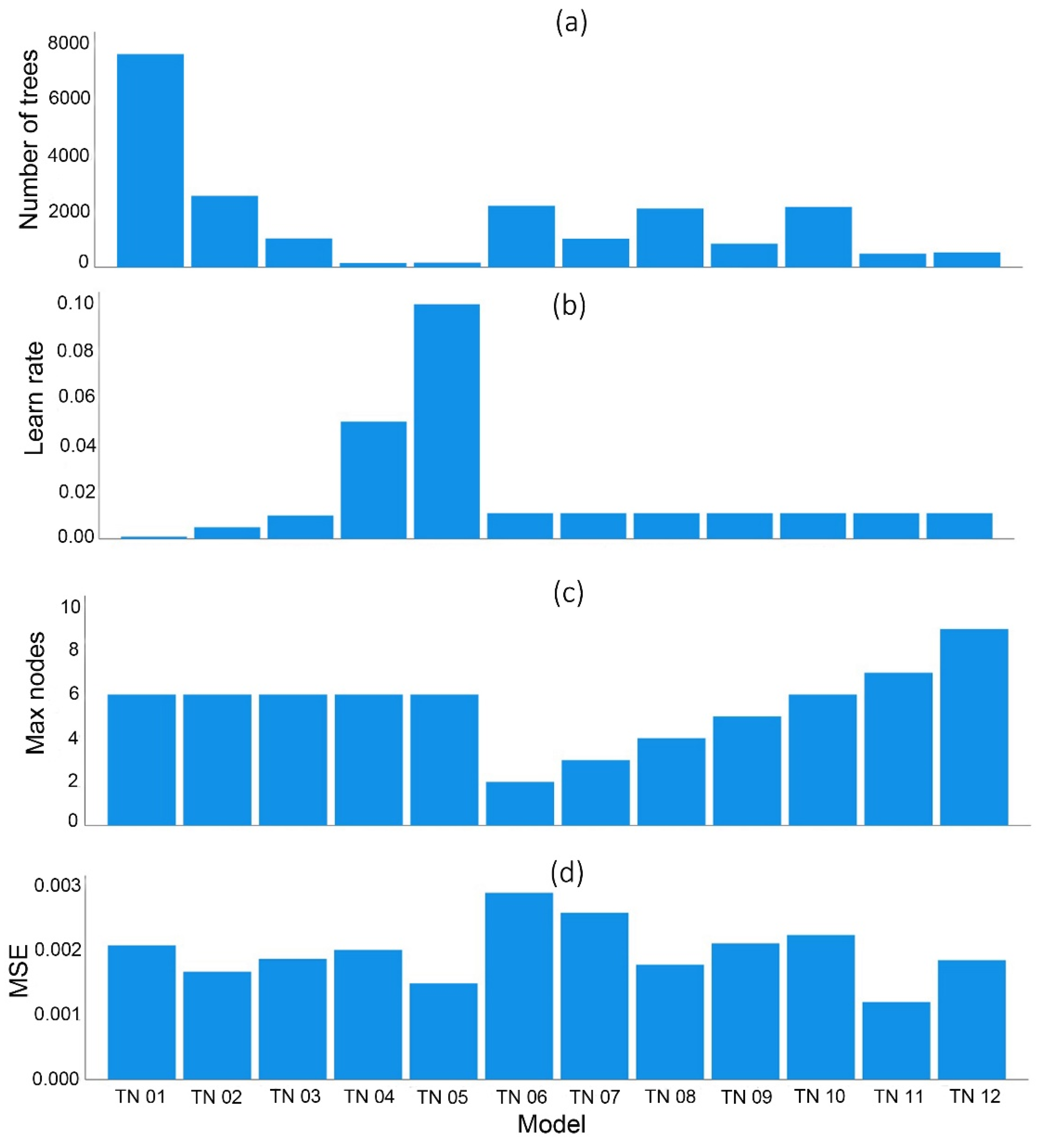
3.2. TreeNet Performance
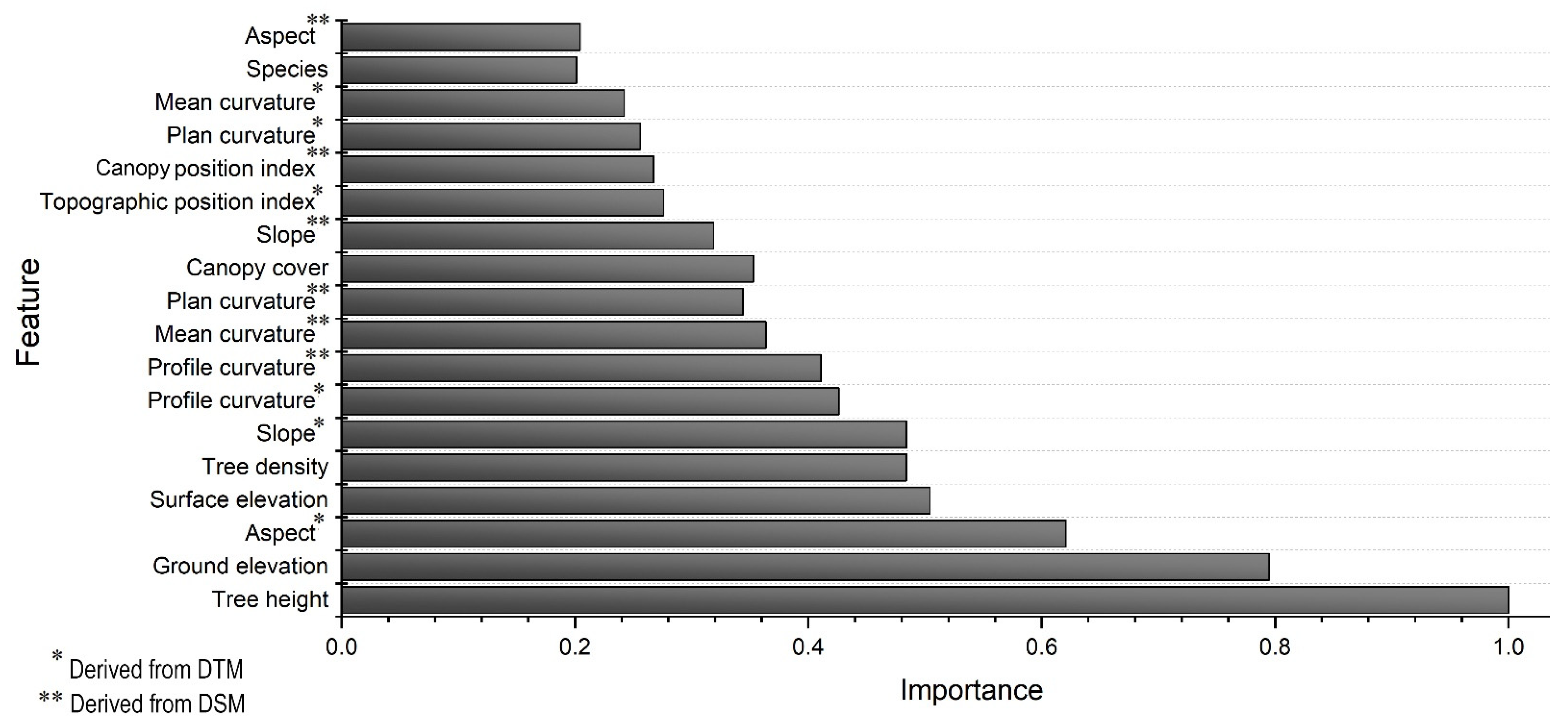
3.3. Features’ Importance
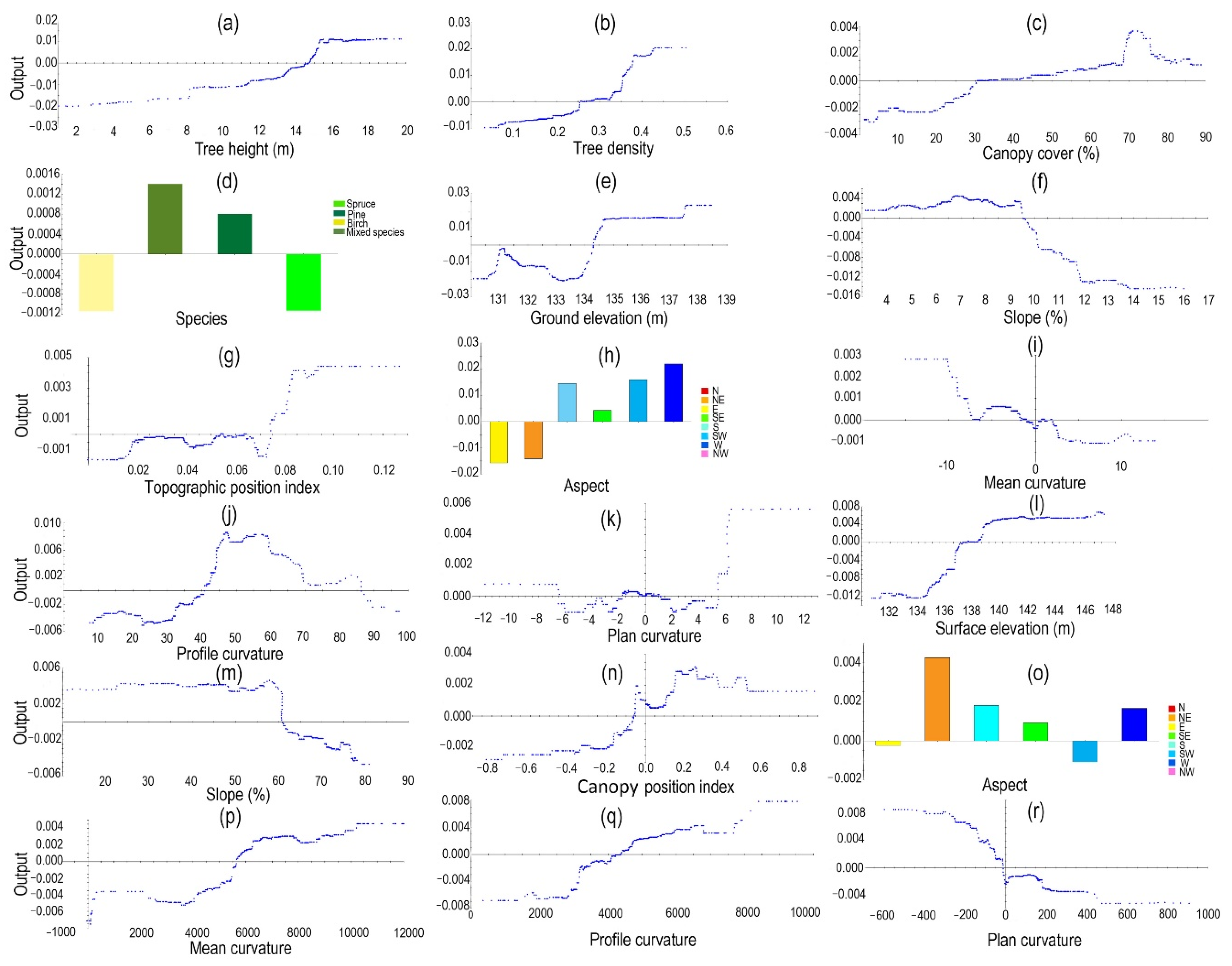
3.4. Marginal Effect of Individual Features
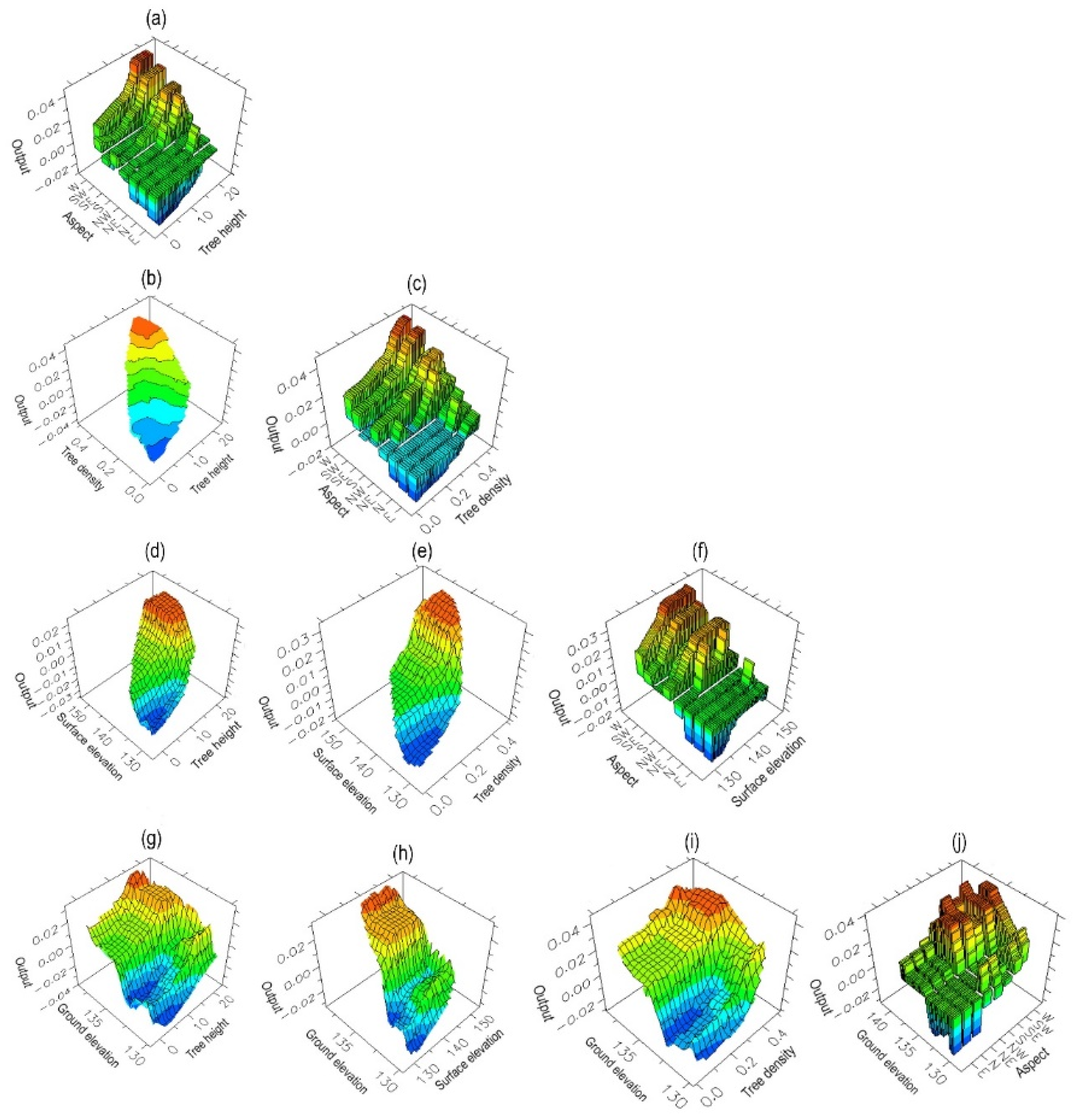
3.5. Marginal Effects of Pairs of Features
4. Discussion
4.1. The Positioning Accuracy of the Low-Cost GNSS Receiver
4.2. The Performance of TreeNet
4.3. Influential Forest Features
4.4. The Application
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pini, M.; Marucco, G.; Falco, G.; Nicola, M.; Wilde, W.D. Experimental Testbed and Methodology for the Assessment of RTK GNSS Receivers Used in Precision Agriculture. IEEE Access 2020, 8, 14690–14703. [Google Scholar] [CrossRef]
- Kadeřábek, J.; Shapoval, V.; Matějka, P.; Kroulík, M.; Kumhála, F. Comparison of Four RTK Receivers Operating in the Static and Dynamic Modes Using Measurement Robotic Arm. Sensors 2021, 21, 7794. [Google Scholar] [CrossRef] [PubMed]
- Möller, J.J.; Arlinger, J.; Hannrup, B.; Larsson, W.; Barth, A. Harvester data as a base for management of forest operations and feedback to forest owners. In Proceedings of the 4th Forest Engineering Conference: Innovation in Forest Engineering—Adapting to Structural Change, Stellenbosch, South Africa, 5–7 April 2011; Ackerman, P., Ham, H., Elizabeth, G., Eds.; Department of Forest and Wood Science: White River, South Africa, 2011. ISBN 978-0-7972-1284-8. [Google Scholar]
- Olivera, A.; Visser, R. Using the harvester on-board computer capability to move towards precision forestry. N. Z. J. For. 2016, 60, 3–7. [Google Scholar] [CrossRef] [Green Version]
- Auat Cheein, F.; Torres-Torriti, M.; Rosell-Polo, J.R. Usability analysis of scan matching techniques for localization of field machinery in avocado groves. Comput. Electron. Agric. 2019, 162, 941–950. [Google Scholar] [CrossRef]
- Kemmerer, J.; Labelle, E.R. Using harvester data from on-board computers: A review of key findings, opportunities and challenges. Eur. J. For. Res. 2021, 140, 1–17. [Google Scholar] [CrossRef]
- Saukkola, A.; Melkas, T.; Riekki, K.; Sirparanta, S.; Peuhkurinen, J.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Predicting Forest Inventory Attributes Using Airborne Laser Scanning, Aerial Imagery, and Harvester Data. Remote Sens. 2019, 11, 797. [Google Scholar] [CrossRef] [Green Version]
- Noordermeer, L.; Næsset, E.; Gobakken, T. Effects of harvester positioning errors on merchantable timber volume predicted and estimated from airborne laser scanner data in mature Norway spruce forests. Silva Fenn. 2022, 56, 10608. [Google Scholar] [CrossRef]
- Schwarzbach, P.; Michler, A.; Tauscher, P.; Michler, O. An Empirical Study on V2X Enhanced Low-Cost GNSS Cooperative Positioning in Urban Environments. Sensors 2019, 19, 5201. [Google Scholar] [CrossRef] [Green Version]
- Donahue, B.; Wentzel, J.; Berg, R. Guidelines for RTK/RTN GNSS Surveying in Canada; Natural Resources Canada: Vancouver, BC, Canada, 2013. [Google Scholar]
- Sigrist, P.; Coppin, P.; Hermy, M. Impact of forest canopy on quality and accuracy of GPS measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Naesset, E.; Jonmeister, T. Assessing Point Accuracy of DGPS Under Forest Canopy Before Data Acquisition, in the Field and After Postprocessing. Scand. J. For. Res. 2002, 17, 351–358. [Google Scholar] [CrossRef]
- Murgaš, V.; Sačkov, I.; Sedliak, M.; Tunák, D.; Chudý, F. Assessing horizontal accuracy of inventory plots in forests with different mix of tree species composition and development stage. J. For. Sci. 2018, 64, 478–485. [Google Scholar] [CrossRef] [Green Version]
- Feng, T.; Chen, S.; Feng, Z.; Shen, C.; Tian, Y. Effects of Canopy and Multi-Epoch Observations on Single-Point Positioning Errors of a GNSS in Coniferous and Broadleaved Forests. Remote Sens. 2021, 13, 2325. [Google Scholar] [CrossRef]
- Ordóñez Galán, C.; Rodríguez-Pérez, J.R.; Martínez Torres, J.; García Nieto, P.J. Analysis of the influence of forest environments on the accuracy of GPS measurements by using genetic algorithms. Math. Comput. Model. 2011, 54, 1829–1834. [Google Scholar] [CrossRef]
- Piedallu, C.; Gégout, J.-C. Effects of Forest Environment and Survey Protocol on GPS Accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 1071–1078. [Google Scholar] [CrossRef]
- Valbuena, R.; Mauro, F.; Rodríguez-Solano, R.; Manzanera, J.A. Partial Least Squares for Discriminating Variance Components in Global Navigation Satellite Systems Accuracy Obtained Under Scots Pine Canopies. For. Sci. 2012, 58, 139–153. [Google Scholar] [CrossRef]
- Kabir, M.S.N.; Song, M.-Z.; Sung, N.-S.; Chung, S.-O.; Kim, Y.-J.; Noguchi, N.; Hong, S.-J. Performance comparison of single and multi-GNSS receivers under agricultural fields in Korea. Eng. Agric. Environ. Food 2016, 9, 27–35. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Varhola, A.; Vastaranta, M.; Coops, N.C.; Cook, B.D.; Pitt, D.; Woods, M. A best practices guide for generating forest inventory attributes from airborne laser scanning data using an area-based approach. For. Chron. 2013, 89, 722–723. [Google Scholar] [CrossRef] [Green Version]
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer: Dordrecht, The Netherlands, 2014; ISBN 978-94-017-8662-1. [Google Scholar]
- Su, Y. The Use of LiDAR in Multi-Scale Forestry Applications; University of California: Merced, CA, USA, 2017. [Google Scholar]
- Ene, L.T.; Næsset, E.; Gobakken, T.; Mauya, E.W.; Bollandsås, O.M.; Gregoire, T.G.; Ståhl, G.; Zahabu, E. Large-scale estimation of aboveground biomass in miombo woodlands using airborne laser scanning and national forest inventory data. Remote Sens. Environ. 2016, 186, 626–636. [Google Scholar] [CrossRef]
- Noordermeer, L.; Økseter, R.; Ørka, H.O.; Gobakken, T.; Næsset, E.; Bollandsås, O.M. Classifications of Forest Change by Using Bitemporal Airborne Laser Scanner Data. Remote Sens. 2019, 11, 2145. [Google Scholar] [CrossRef] [Green Version]
- Sherba, J.; Blesius, L.; Davis, J. Object-Based Classification of Abandoned Logging Roads under Heavy Canopy Using LiDAR. Remote Sens. 2014, 6, 4043–4060. [Google Scholar] [CrossRef] [Green Version]
- Abdi, O.; Uusitalo, J.; Kivinen, V.-P. Logging Trail Segmentation via a Novel U-Net Convolutional Neural Network and High-Density Laser Scanning Data. Remote Sens. 2022, 14, 349. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping. Remote Sens. 2017, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Poluzzi, L.; Tavasci, L.; Corsini, F.; Barbarella, M.; Gandolfi, S. Low-cost GNSS sensors for monitoring applications. Appl. Geomat. 2020, 12, 35–44. [Google Scholar] [CrossRef]
- Tsakiri, M.; Sioulis, A.; Piniotis, G. Compliance of low-cost, single-frequency GNSS receivers to standards consistent with ISO for control surveying. Int. J. Metrol. Qual. Eng. 2017, 8, 11. [Google Scholar] [CrossRef] [Green Version]
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of Using Low-Cost Dual-Frequency GNSS Receivers for Land Surveying. Sensors 2021, 21, 1956. [Google Scholar] [CrossRef]
- Xue, C.; Psimoulis, P.; Zhang, Q.; Meng, X. Analysis of the performance of closely spaced low-cost multi-GNSS receivers. Appl. Geomat. 2021, 13, 415–435. [Google Scholar] [CrossRef]
- Semler, Q.; Mangin, L.; Moussaoui, A.; Semin, E. Development of a Low-Cost Centimetric Gnss Positioning Solution for Android Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 309–314. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Zhang, H.; Gao, Z.; Chen, Q.; Niu, X. High-Accuracy Positioning in Urban Environments Using Single-Frequency Multi-GNSS RTK/MEMS-IMU Integration. Remote Sens. 2018, 10, 205. [Google Scholar] [CrossRef] [Green Version]
- Yuwono; Handoko, E.Y.; Cahyadi, M.N.; Rahmadiansah, A.; Yudha, I.S.; Sari, A. Assessment of the Single Frequency Low Cost GPS RTK Positioning. IOP Conf. Ser. Earth Environ. Sci. 2019, 280, 12025. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P. Evaluation of Low-Cost GNSS Receiver under Demanding Conditions in RTK Network Mode. Sensors 2021, 21, 5552. [Google Scholar] [CrossRef] [PubMed]
- Krietemeyer, A.; van der Marel, H.; van de Giesen, N.; Veldhuis, M.-C.T. High Quality Zenith Tropospheric Delay Estimation Using a Low-Cost Dual-Frequency Receiver and Relative Antenna Calibration. Remote Sens. 2020, 12, 1393. [Google Scholar] [CrossRef]
- Jackson, J.; Saborio, R.; Ghazanfar, S.A.; Gebre-Egziabher, D.; Davis, B. Evaluation of Low-Cost, Centimeter-Level Accuracy OEM GNSS Receivers; MN/RC 2018-10; University of Minnesota: Minneapolis, MN, USA, 2018. [Google Scholar]
- Hauglin, M.; Hansen, E.H.; Næsset, E.; Busterud, B.E.; Gjevestad, J.G.O.; Gobakken, T. Accurate single-tree positions from a harvester: A test of two global satellite-based positioning systems. Scand. J. For. Res. 2017, 32, 774–781. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- National Land Survey of Finland. Laser Scanning Data 5 p. Available online: https://www.maanmittauslaitos.fi/en/maps-and-spatial-data/expert-users/product-descriptions/laser-scanning-data-5-p (accessed on 6 May 2021).
- National Land Survey of Finland. NLS Orthophotos. Available online: https://tiedostopalvelu.maanmittauslaitos.fi/tp/kartta?lang=en (accessed on 1 May 2021).
- U-blox AG. ZED-F9P: U-blox F9 High Precision GNSS Module. Integration Manual. Available online: https://www.u-blox.com/en/docs/UBX-18010802 (accessed on 15 November 2021).
- U-blox AG. ANN-MB Series: Multi-band, High Precision GNSS Antennas. Data Sheet. Available online: https://www.u-blox.com/sites/default/files/ANN-MB_DataSheet_%28UBX-18049862%29.pdf (accessed on 15 November 2021).
- U-blox AG. ZED-F9P: Application Note. Available online: https://www.u-blox.com/en/docs/UBX-19009093 (accessed on 15 November 2021).
- U-blox AG. ZED-F9P Module: U-blox F9 High Precision GNSS Module. Available online: https://www.u-blox.com/en/ubx-viewer/view/ZED-F9P_ProductSummary_UBX-17005151?url=https%3A%2F%2Fwww.u-blox.com%2Fsites%2Fdefault%2Ffiles%2FZED-F9P_ProductSummary_UBX-17005151.pdf (accessed on 1 December 2021).
- U-blox AG. U-Center: GNSS Evaluation Software for Windows. User Guide. Available online: https://www.u-blox.com/en/docs/UBX-13005250 (accessed on 1 December 2021).
- ESRI. Lidar Solutions in ArcGIS: Estimating Forest Canopy Density and Height. Available online: https://desktop.arcgis.com/en/arcmap/latest/manage-data/las-dataset/lidar-solutions-estimating-forest-density-and-height.htm (accessed on 10 December 2021).
- Wilson, J.P. Environmental Applications of Digital Terrain Modeling, 1st ed.; Wiley-Blackwell: Hoboken, NJ, USA, 2018. [Google Scholar]
- Florinsky, I.V. Digital Terrain Analysis in Soil Science and Geology; Academic Press: Oxford, UK; Amsterdam, The Netherlands, 2012; ISBN 978-0-12-385036-2. [Google Scholar]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017; ISBN 9781482243017. [Google Scholar]
- Evans, J.; Hudak, A.; Faux, R.; Smith, A.M. Discrete Return Lidar in Natural Resources: Recommendations for Project Planning, Data Processing, and Deliverables. Remote Sens. 2009, 1, 776–794. [Google Scholar] [CrossRef] [Green Version]
- García, R.; Suárez, J.C.; Patenaude, G. Delineation of individual tree crowns for LiDAR tree and stand parameter estimation in Scottish woodlands. In The European Information Society; Cartwright, W., Gartner, G., Meng, L., Peterson, M.P., Fabrikant, S.I., Wachowicz, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 55–85. ISBN 978-3-540-72384-4. [Google Scholar]
- ESRI. Creating Intensity Images from Lidar in ArcGIS. Available online: https://desktop.arcgis.com/en/arcmap/latest/manage-data/las-dataset/lidar-solutions-creating-intensity-images-from-lidar.htm (accessed on 12 December 2021).
- Friedman, J.H. Stochastic gradient boosting. Comput. Stat. Data Anal. 2002, 38, 367–378. [Google Scholar] [CrossRef]
- Salford Systems. Salford Predictive Modeler: Introducing TreeNet® Gradient Boosting Machine. 2019. Available online: https://www.minitab.com/en-us/products/spm/user-guides/ (accessed on 11 December 2021).
- Swets, J.A. Measuring the accuracy of diagnostic systems. Science 1988, 240, 1285–1293. [Google Scholar] [CrossRef] [Green Version]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Statist. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Hutchinson, M.F. A new procedure for gridding elevation and stream line data with automatic removal of spurious pits. J. Hydrol. 1989, 106, 211–232. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonnell, R.A. Principles of Geographical Information Systems; Oxford University Press: New York, NY, USA, 1998; ISBN 9780198748618. [Google Scholar]
- Szypuła, B. Digital Elevation Models in Geomorphology. In Hydro-Geomorphology—Models and Trends; Shukla, D.P., Ed.; InTech: Rijeka, Croatia, 2017; ISBN 978-953-51-3573-9. [Google Scholar]
- Holpp, M.; Kroulik, M.; Kviz, Z.; Anken, T.; Sauter, M.; Hensel, O. Large-scale field evaluation of driving performance and ergonomic effects of satellite-based guidance systems. Biosyst. Eng. 2013, 116, 190–197. [Google Scholar] [CrossRef]
- Santra, A.; Mahato, S.; Mandal, S.; Dan, S.; Verma, P.; Banerjee, P.; Bose, A. Augmentation of GNSS utility by IRNSS/NavIC constellation over the Indian region. Adv. Space Res. 2019, 63, 2995–3008. [Google Scholar] [CrossRef]
- Brach, M. Rapid Static Positioning Using a Four System GNSS Receivers in the Forest Environment. Forests 2022, 13, 45. [Google Scholar] [CrossRef]
- Wing, M.G. Consumer-Grade GPS Receiver Measurement Accuracy in Varying Forest Conditions. Res. J. For. 2011, 5, 78–88. [Google Scholar] [CrossRef] [Green Version]
- Joyce, M.; Moen, R. Accuracy of a Modular GPS/GLONASS Receiver; NRRI/TR-2018/28, 2018, Release 1.0; University of Minnesota Duluth: Duluth, MN, USA, 2018. [Google Scholar]
- Konnestad, A.J. On the Accuracy of GNSS in Forests: A Test of Consumer-Grade GNSS Equipment, Smartphones and Open-Source Postprocessing Software under Forest Canopies, for Mapping of Forest Species; Norwegian University of Life Sciences: As, Norway, 2018. [Google Scholar]
- Pesyna, K.M.; Heath, R.W.; Humphreys, T.E. Centimeter Positioning with a Smartphone-Quality GNSS Antenna. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014. [Google Scholar]
- Merry, K.; Bettinger, P. Smartphone GPS accuracy study in an urban environment. PLoS ONE 2019, 14, e0219890. [Google Scholar] [CrossRef] [Green Version]
- Ritchie, D.A. Factors That Affect the Global Positioning System and Global Navigation Satellite System in an Urban and Forested Environment; East Tennessee State University: Johnson City, TN, USA, 2007. [Google Scholar]
- Brach, M.; Stereńczak, K.; Bolibok, L.; Kwaśny, Ł.; Krok, G.; Laszkowski, M. Impacts of forest spatial structure on variation of the multipath phenomenon of navigation satellite signals. Folia For. Pol. 2019, 61, 3–21. [Google Scholar] [CrossRef] [Green Version]
- Pirti, A. Accuracy Analysis of GPS Positioning Near the Forest Environment. Croat. J. For. Eng. 2008, 29, 189–199. [Google Scholar]
- Simwanda, M.; Wing, M.G.; Sessions, J. Evaluating Global Positioning System Accuracy for Forest Biomass Transportation Tracking within Varying Forest Canopy. West. J. Appl. For. 2011, 26, 165–173. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Hu, X.; Xu, L.; Wu, Y. Construction and Accuracy Analysis of a BDS/GPS-Integrated Positioning Algorithm for Forests. Croat. J. For. Eng. 2021, 42, 321–335. [Google Scholar] [CrossRef]
- Kobal, M.; Bertoncelj, I.; Pirotti, F.; Dakskobler, I.; Kutnar, L. Using lidar data to analyse sinkhole characteristics relevant for understory vegetation under forest cover-case study of a high karst area in the dinaric mountains. PLoS ONE 2015, 10, e0122070. [Google Scholar] [CrossRef] [Green Version]
- D’Eon, R.G.; Delparte, D. Effects of radio-collar position and orientation on GPS radio-collar performance, and the implications of PDOP in data screening. J. Appl. Ecol. 2005, 42, 383–388. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar] [CrossRef] [PubMed]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdi, O.; Uusitalo, J.; Pietarinen, J.; Lajunen, A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sens. 2022, 14, 2856. https://doi.org/10.3390/rs14122856
Abdi O, Uusitalo J, Pietarinen J, Lajunen A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sensing. 2022; 14(12):2856. https://doi.org/10.3390/rs14122856
Chicago/Turabian StyleAbdi, Omid, Jori Uusitalo, Julius Pietarinen, and Antti Lajunen. 2022. "Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet" Remote Sensing 14, no. 12: 2856. https://doi.org/10.3390/rs14122856