
Prediction of the Nitrogen, Phosphorus and Potassium Contents in Grape Leaves at Different Growth Stages Based on UAV Multispectral Remote Sensing

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Overview of the Test Area
2.2. Experimental Design
2.3. Observation Indicators and Methods
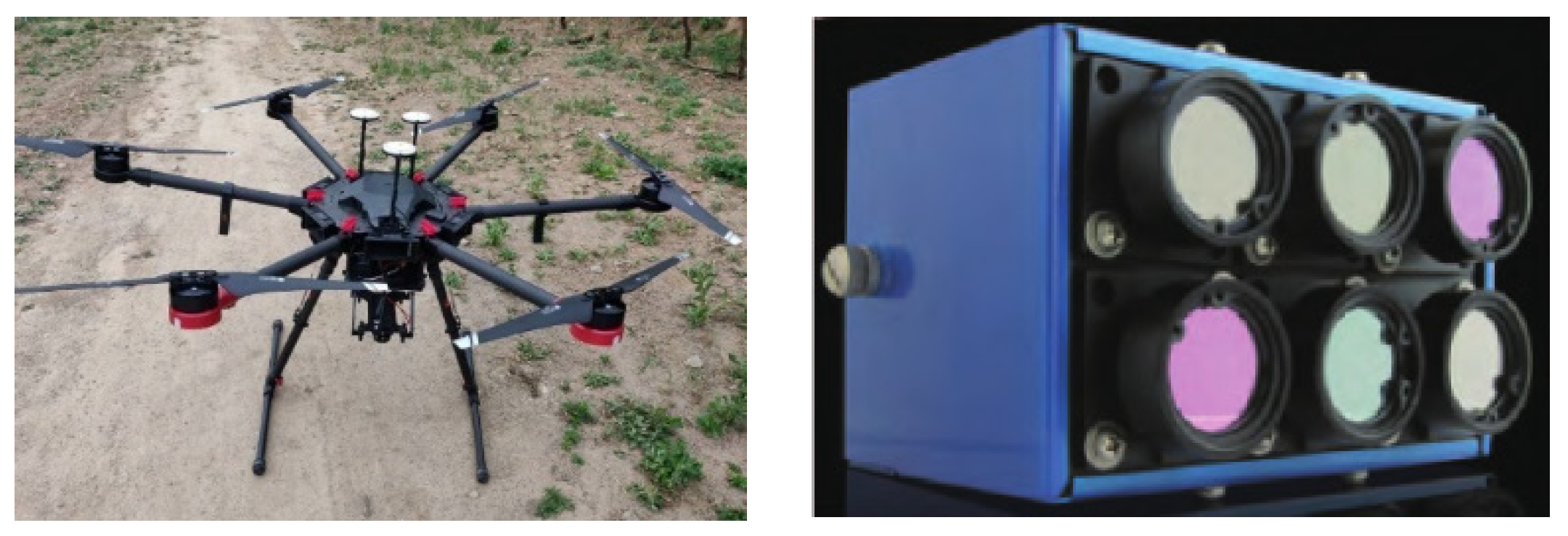
2.3.1. UAV Multispectral Image Acquisition and Preprocessing
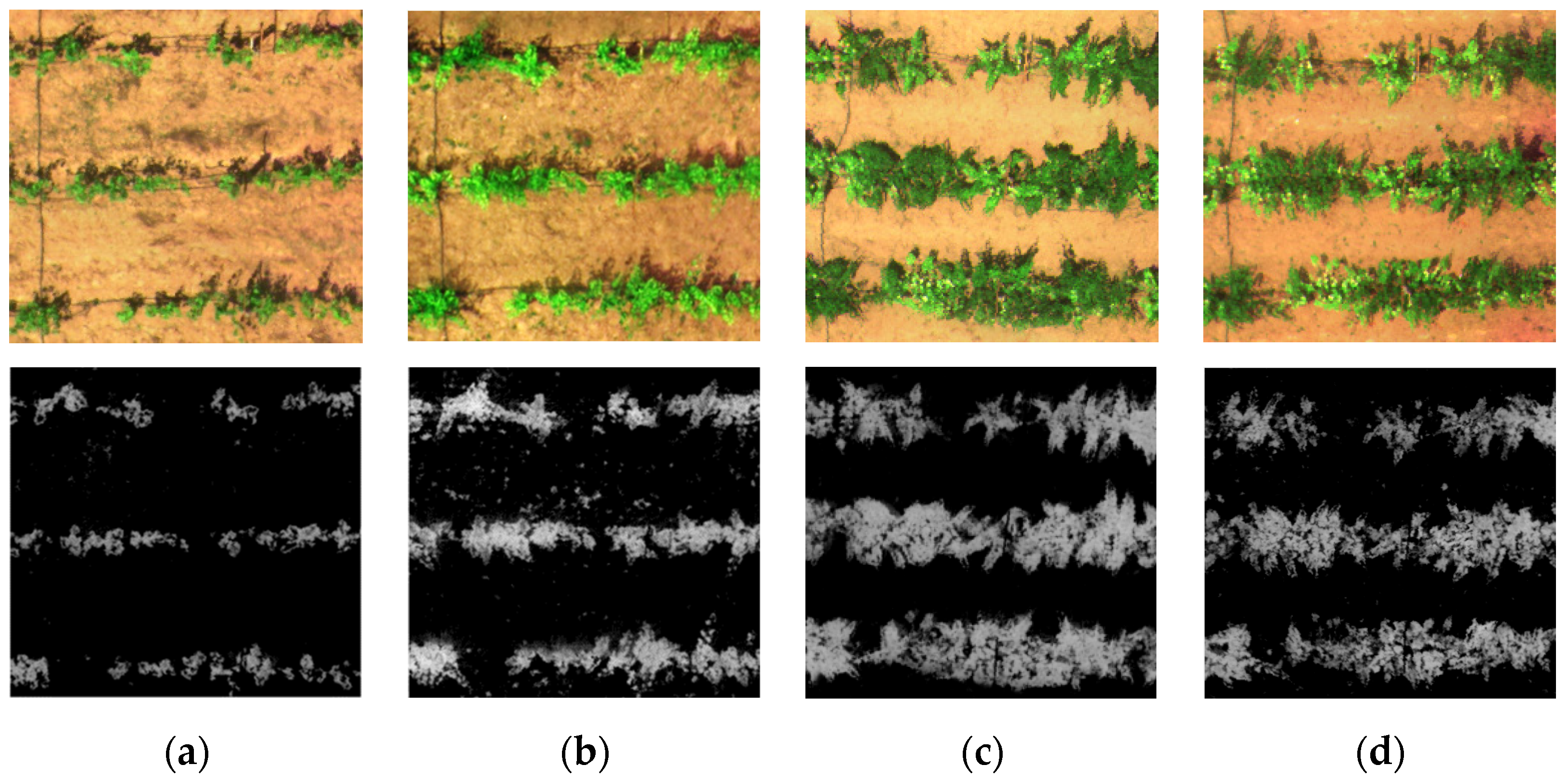
2.3.2. Extracting Band Reflectance
2.3.3. Vegetation Indices (VIs)
2.3.4. Determination of Leaf Nutrient Contents
2.4. Model Building and Data Analysis
2.4.1. PLS Model
2.4.2. RF Model
2.4.3. SVM Model
2.4.4. ELM Model
2.4.5. Uncertainty Analysis
2.5. Model Verification
3. Results
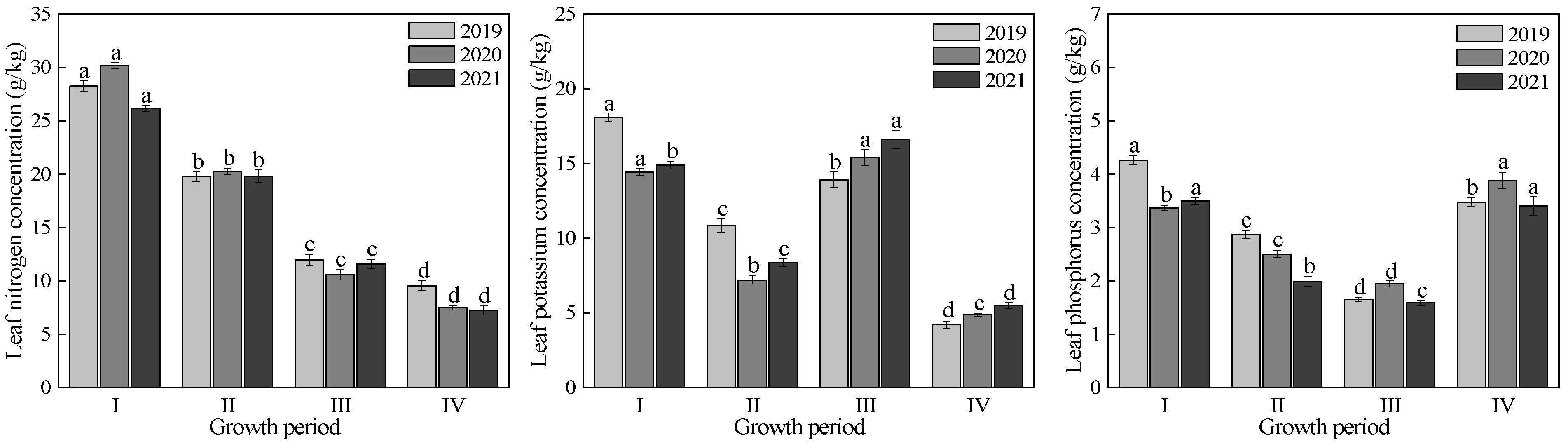
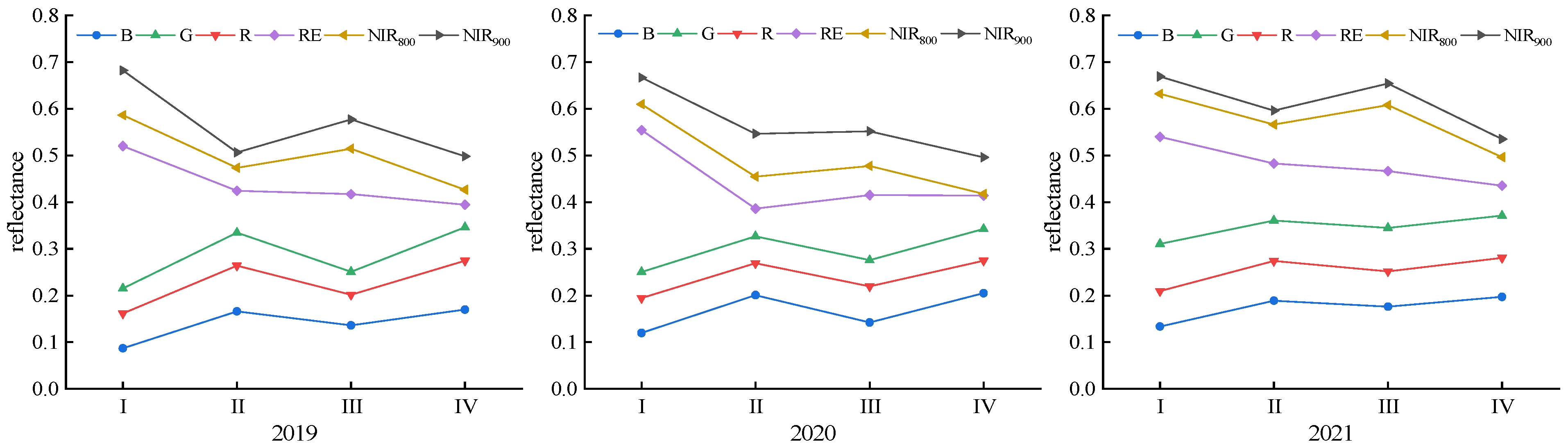
3.1. Variations in the LNC, LPC and LKC Values and Canopy Reflectance at Different Grape Growth Stages
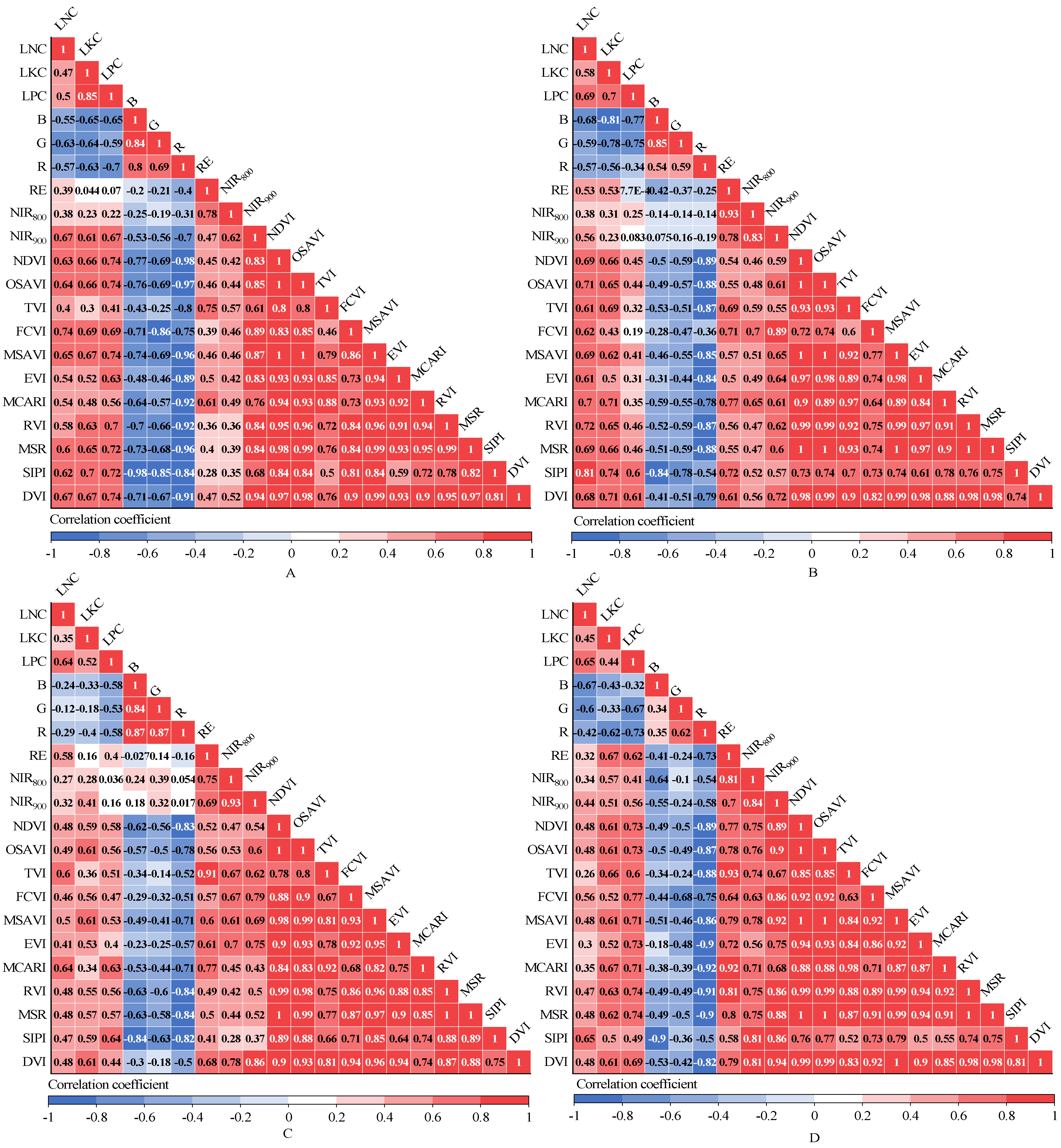
3.2. Correlation Analyses between Spectral Variables and the LNC, LKC and LPC
3.3. LNC, LKC, and LPC Prediction Models Constructed Based on Different Spectral Variables
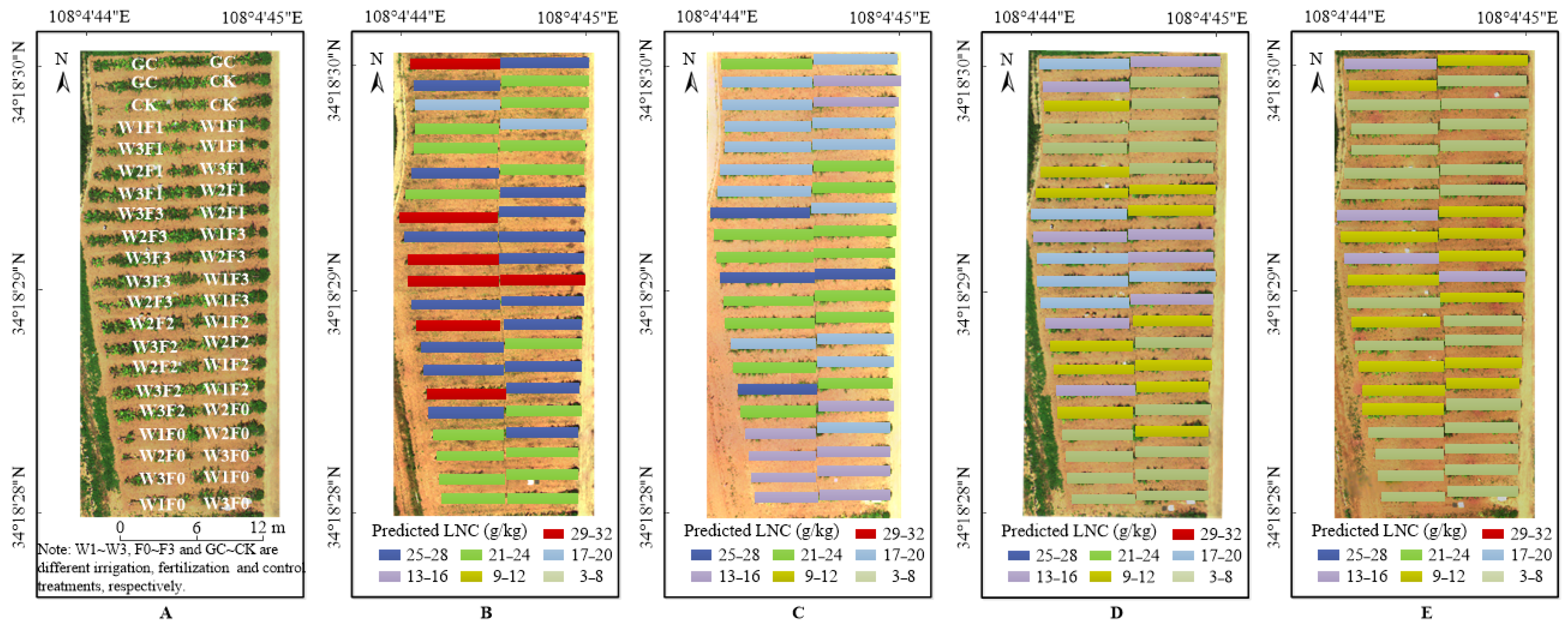
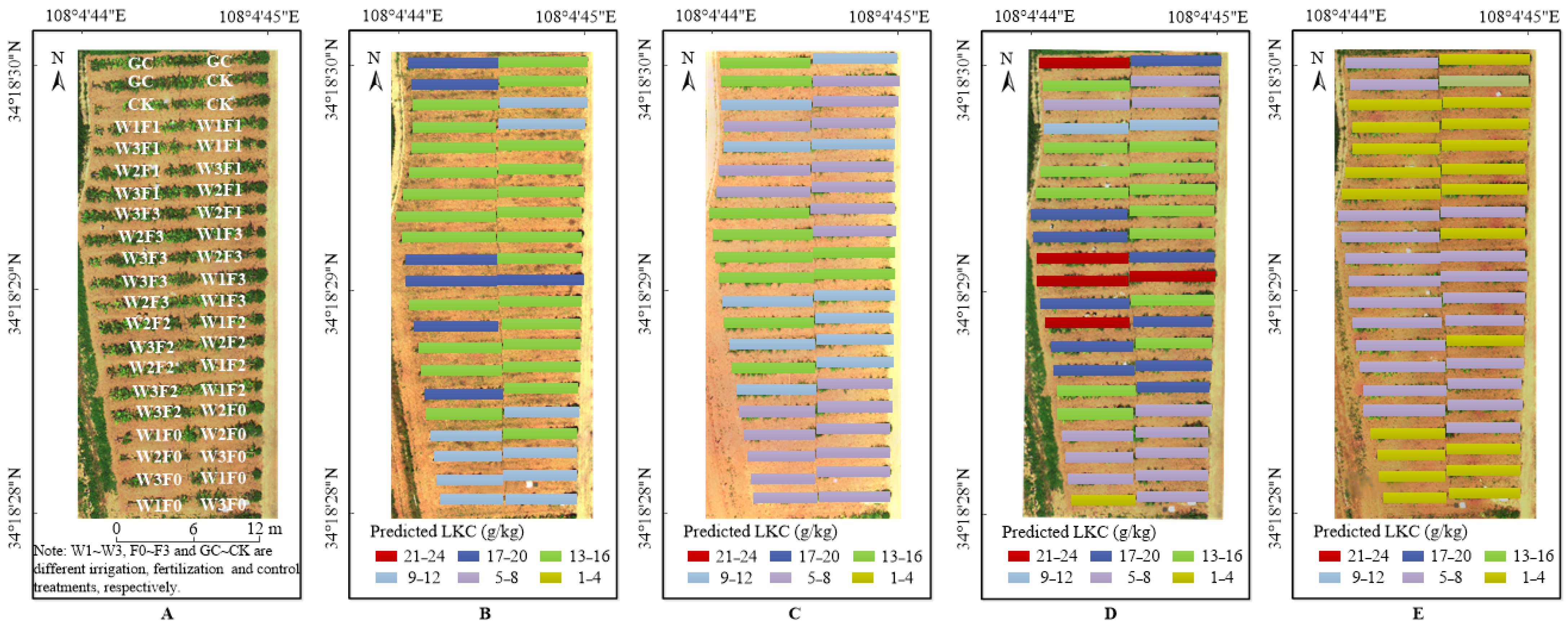
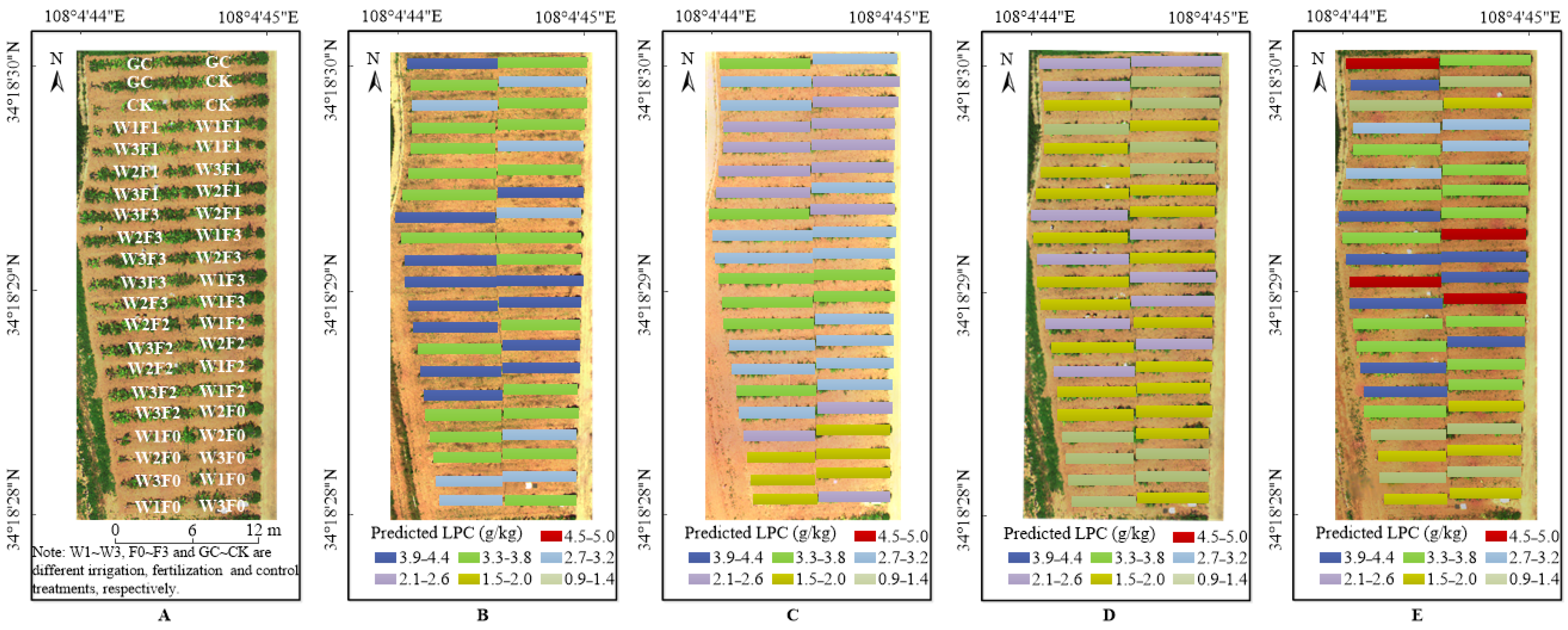
3.4. Distributions of LNC, LKC and LPC in Different Growth Stages
3.5. Model Uncertainty Analysis
4. Discussion
4.1. Comparison of Sensitive Spectral Variables at Different Growth Stages
4.2. Performances of Different Machine Learning Models
4.3. Research Limitations and Future Prospects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. Food and Agriculture Organization of the United Nations. 2019. Available online: http://www.fao.org/faostat/en/#data (accessed on 22 March 2022).
- Jinglin, L.; Hongju, Z.; Zhifang, L. Effects of Application of Potassium on the Yield and Quality of Grape in Greenhouse. Chin. J. Soil Sci. 2015, 46, 694–697. [Google Scholar]
- Lianjun, W.; Chenghan, W.; Jianlei, Q.; Yingkui, X. Effects of Water and Fertilizer Quality of Grape under Drip Coupling on Growth, Yield and Irrigation with Film Mulching. Trans. Chin. Soc. Agric. Mach. 2016, 47, 113–119. [Google Scholar] [CrossRef]
- Berger, K.; Verrelst, J.; Féret, J.-B.; Wang, Z.; Wocher, M.; Strathmann, M.; Danner, M.; Mauser, W.; Hank, T. Crop nitrogen monitoring: Recent progress and principal developments in the context of imaging spectroscopy missions. Remote Sens. Environ. 2020, 242, 111758. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Pengfei, W.; Xingang, X.; Zhongyuan, L.; Guijun, Y.; Zhenhai, L.; Haikuan, F.; Guo, C.; Lingling, F.; Yulong, W.; Shuaibing, L. Remote sensing estimation of nitrogen content in summer maize leaves based on multispectral images of UAV. Trans. Chin. Soc. Agric. Eng. 2019, 35, 126–133, 335. [Google Scholar]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Barbedo, J. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Mortensen, A.K.; Mao, P.; Boelt, B.; Gislum, R. Estimating the nitrogen nutrition index in grass seed crops using a UAV-mounted multispectral camera. Int. J. Remote Sens. 2019, 40, 2467–2482. [Google Scholar] [CrossRef]
- Zheng, H.; Li, W.; Jiang, J.; Liu, Y.; Cheng, T.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, Y.; Yao, X. A Comparative Assessment of Different Modeling Algorithms for Estimating Leaf Nitrogen Content in Winter Wheat Using Multispectral Images from an Unmanned Aerial Vehicle. Remote Sens. 2018, 10, 2026. [Google Scholar] [CrossRef] [Green Version]
- Cilia, C.; Panigada, C.; Rossini, M.; Meroni, M.; Busetto, L.; Amaducci, S.; Boschetti, M.; Picchi, V.; Colombo, R. Nitrogen Status Assessment for Variable Rate Fertilization in Maize through Hyperspectral Imagery. Remote Sens. 2014, 6, 6549. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Miao, Y.; Yuan, F.; Gnyp, M.L.; Yao, Y.; Cao, Q.; Wang, H.; Lenz-Wiedemann, V.I.S.; Bareth, G. Potential of RapidEye and WorldView-2 Satellite Data for Improving Rice Nitrogen Status Monitoring at Different Growth Stages. Remote Sens. 2017, 9, 227. [Google Scholar] [CrossRef] [Green Version]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine Learning in Agriculture: A Review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ali, I.; Greifeneder, F.; Stamenkovic, J.; Neumann, M.; Notarnicola, C. Review of Machine Learning Approaches for Biomass and Soil Moisture Retrievals from Remote Sensing Data. Remote Sens. 2015, 7, 15841. [Google Scholar] [CrossRef] [Green Version]
- Hansen, P.M.; Schjoerring, J.K. Reflectance measurement of canopy biomass and nitrogen status in wheat crops using normalized difference vegetation indices and partial least squares regression. Remote Sens. Environ. 2003, 86, 542–553. [Google Scholar] [CrossRef]
- Jin, J.; Huang, N.; Huang, Y.; Yan, Y.; Zhao, X.; Wu, M. Proximal Remote Sensing-Based Vegetation Indices for Monitoring Mango Tree Stem Sap Flux Density. Remote Sens. 2022, 14, 1483. [Google Scholar] [CrossRef]
- Wang, F.; Yang, M.; Ma, L.; Zhang, T.; Qin, W.; Li, W.; Zhang, Y.; Sun, Z.; Wang, Z.; Li, F.; et al. Estimation of Above-Ground Biomass of Winter Wheat Based on Consumer-Grade Multi-Spectral UAV. Remote Sens. 2022, 14, 1251. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, Q.; Shang, J.; Liu, C.; Zhuang, T.; Ding, J.; Xian, Y.; Zhao, L.; Wang, W.; Zhou, G.; et al. UAV- and Machine Learning-Based Retrieval of Wheat SPAD Values at the Overwintering Stage for Variety Screening. Remote Sens. 2021, 13, 5166. [Google Scholar] [CrossRef]
- Liu, X.; Lv, Q.; He, S.; Yi, S.; Xie, R.; Zheng, Y.; Hu, D.; Wang, Z.; Deng, j. Estimation of nitrogen and pigments content in citrus canopy by low-altitude remote sensing. J. Remote Sens. 2015, 19, 1007–1018. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, H.; Wang, P. Quantitative modelling for leaf nitrogen content of winter wheat using UAV-based hyperspectral data. Int. J. Remote Sens. 2017, 38, 2117–2134. [Google Scholar] [CrossRef]
- Li, M.; Zhu, X.; Bai, X.; Peng, Y.; Tian, Z.; Jiang, Y. Remote Sensing Inversion of Nitrogen Content in Apple Canopy Based on Shadow Removal in UAV Multi-Spectral Remote Sensing Images. Sci. Agric. Sin. 2021, 54, 2084–2094. [Google Scholar] [CrossRef]
- Shrestha, D.L.; Kayastha, N.; Solomatine, D.P. A novel approach to parameter uncertainty analysis of hydrological models using neural networks. Hydrol. Earth Syst. Sci. Discuss. 2009, 6, 1235–1248. [Google Scholar] [CrossRef] [Green Version]
- Chancia, R.; Bates, T.; Vanden Heuvel, J.; van Aardt, J. Assessing Grapevine Nutrient Status from Unmanned Aerial System (UAS) Hyperspectral Imagery. Remote Sens. 2021, 13, 4489. [Google Scholar] [CrossRef]
- Moghimi, A.; Pourreza, A.; Zuniga-Ramirez, G.; Williams, L.E.; Fidelibus, M.W. A Novel Machine Learning Approach to Estimate Grapevine Leaf Nitrogen Concentration Using Aerial Multispectral Imagery. Remote Sens. 2020, 12, 3515. [Google Scholar] [CrossRef]
- Peng, X.; Hu, X.; Chen, D.; Zhou, Z.; Guo, Y.; Deng, X.; Zhang, X.; Yu, T. Prediction of Grape Sap Flow in a Greenhouse Based on Random Forest and Partial Least Squares Models. Water 2021, 13, 3078. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Broge, N.H.; Leblanc, E. Comparing prediction power and stability of broadband and hyperspectral vegetation indices for estimation of green leaf area index and canopy chlorophyll density. Remote Sens. Environ. 2001, 76, 156–172. [Google Scholar] [CrossRef]
- Jiang, J.; Cai, W.; Zheng, H.; Cheng, T.; Tian, Y.; Zhu, Y.; Ehsani, R.; Hu, Y.; Niu, Q.; Gui, L.; et al. Using Digital Cameras on an Unmanned Aerial Vehicle to Derive Optimum Color Vegetation Indices for Leaf Nitrogen Concentration Monitoring in Winter Wheat. Remote Sens. 2019, 11, 2667. [Google Scholar] [CrossRef] [Green Version]
- Qi, J.G.; Chehbouni, A.R.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; de Colstoun, E.B.; McMurtrey, J.E. Estimating Corn Leaf Chlorophyll Concentration from Leaf and Canopy Reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of Vegetation Indices and a Modified Simple Ratio for Boreal Applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- Peñuelas, J.; Gamon, J.A.; Fredeen, A.L.; Merino, J.; Field, C.B. Reflectance indices associated with physiological changes in nitrogen- and water-limited sunflower leaves. Remote Sens. Environ. 1994, 48, 135–146. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learing 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Bingmei, C.; Xiaoping, F.; Zhiming, Z.; Xuerong, L. The principle and prospect of support vector machine. Manuf. Autom. 2010, 32, 136–138. [Google Scholar] [CrossRef]
- Guo, L.; Fu, P.; Shi, T.; Chen, Y.; Zhang, H.; Meng, R.; Wang, S. Mapping field-scale soil organic carbon with unmanned aircraft system-acquired time series multispectral images. Soil Tillage Res. 2020, 196, 104477. [Google Scholar] [CrossRef]
- Du, B.; Hu, X.; Wang, W.; Ma, L.; Zhou, S. Stem flow influencing factors sensitivity analysis and stem flow model applicability in filling stage of alternate furrow irrigated maize. Sci. Agric. Sin. 2018, 51, 233–245. [Google Scholar]
- Sun, G.; Jiao, Z.; Zhang, A.; Li, F.; Fu, H.; Li, Z. Hyperspectral image-based vegetation index (HSVI): A new vegetation index for urban ecological research. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102529. [Google Scholar] [CrossRef]
- Barillé, L.; Mouget, J.-L.; Méléder, V.; Rosa, P.; Jesus, B. Spectral response of benthic diatoms with different sediment backgrounds. Remote Sens. Environ. 2011, 115, 1034–1042. [Google Scholar] [CrossRef]
- Fenling, L.; Qingrui, C.; Jian, S.; Li, W. Remote sensing estimation of winter wheat leaf nitrogen content based on GF-1 satellite data. Trans. Chin. Soc. Agric. Eng. 2016, 32, 157–164. [Google Scholar] [CrossRef]
- Luo, S.; He, Y.; Li, Q.; Jiao, W.; Zhu, Y.; Zhao, X. Nondestructive estimation of potato yield using relative variables derived from multi-period LAI and hyperspectral data based on weighted growth stage. Plant Methods 2020, 16, 150. [Google Scholar] [CrossRef] [PubMed]
- Nguy-Robertson, A.; Gitelson, A.; Peng, Y.; Viña, A.; Arkebauer, T.; Rundquist, D. Green Leaf Area Index Estimation in Maize and Soybean: Combining Vegetation Indices to Achieve Maximal Sensitivity. Agron. J. 2012, 104, 1336–1347. [Google Scholar] [CrossRef] [Green Version]
- Hatfield, J.L.; Prueger, J.H. Value of Using Different Vegetative Indices to Quantify Agricultural Crop Characteristics at Different Growth Stages under Varying Management Practices. Remote Sens. 2010, 2, 562. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Growth Stage | Date of Grape Growth Stage Partition | Date of Image Acquisition | ||||
|---|---|---|---|---|---|---|
| 2019 | 2020 | 2021 | 2019 | 2020 | 2021 | |
| New shoot growth stage | 4/13–5/14 | 4/10–5/18 | 4/15–5/21 | 4/24; 5/9 | 5/5; 5/14 | 5/8; 5/20 |
| Flowering stage | 5/15–5/25 | 5/19–5/29 | 5/22–6/1 | 5/22 | 5/26 | 5/31 |
| Fruit expansion stage | 5/26–7/11 | 5/30–7/12 | 6/2–7/10 | 7/6 | 6/7; 6/14 | 6/10; 6/22 |
| Veraison and maturity stage | 7/12–8/19 | 7/13–8/21 | 7/11–8/15 | 7/23 | 7/28 | 7/23 |
| Treatment | Irrigation Quantity (m3/hm2) | Fertilizer Amount (kg/hm2) | ||
|---|---|---|---|---|
| New Shoot Growth Stage N + P2O5 + K2O | Fruit Expanding Stage N+ P2O5 + K2O | Veraison and Maturity Stage N + P2O5 + K2O | ||
| W1F0 | 97.0 | 0 + 0 + 0 | 0 + 0 + 0 | 0 + 0 + 0 |
| W1F1 | 97.0 | 46.4 + 14.0 + 27.6 | 34.8 + 28.0 + 55.2 | 34.8 + 28.0 + 55.2 |
| W1F2 | 97.0 | 69.6 + 20.8 + 41.6 | 52.2 + 41.6 + 83.2 | 52.2 + 41.6 + 83.2 |
| W1F3 | 97.0 | 92.8 + 27.6 + 55.6 | 69.6 + 111.2 + 52.2 | 69.6 + 111.2 + 52.2 |
| W2F0 | 145.0 | 0 + 0 + 0 | 0 + 0 + 0 | 0 + 0 + 0 |
| W2F1 | 145.0 | 46.4 + 14.0 + 27.6 | 34.8 + 28.0 + 55.2 | 34.8 + 28.0 + 55.2 |
| W2F2 | 145.0 | 69.6 + 20.8 + 41.6 | 52.2 + 41.6 + 83.2 | 52.2 + 41.6 + 83.2 |
| W2F3 | 145.0 | 92.8 + 27.6 + 55.6 | 69.6 + 111.2 + 52.2 | 69.6 + 111.2 + 52.2 |
| W3F0 | 193.0 | 0 + 0 + 0 | 0 + 0 + 0 | 0 + 0 + 0 |
| W3F1 | 193.0 | 46.4 + 14.0 + 27.6 | 34.8 + 28.0 + 55.2 | 34.8 + 28.0 + 55.2 |
| W3F2 | 193.0 | 69.6 + 20.8 + 41.6 | 52.2 + 41.6 + 83.2 | 52.2 + 41.6 + 83.2 |
| W3F3 | 193.0 | 92.8 + 27.6 + 55.6 | 69.6 + 111.2 + 52.2 | 69.6 + 111.2 + 52.2 |
| GC | 193.0 | 92.8 + 27.6 + 55.6 | 69.6 + 111.2 + 52.2 | 69.6 + 111.2 + 52.2 |
| CK | 0 | 0 + 0 + 0 | 0 + 0 + 0 | 0 + 0 + 0 |
| Vegetation Indices | Formula | References |
|---|---|---|
| Normalized difference VI (NDVI) | [27] | |
| Optimized soil adjusted VI (OSAVI) | [28] | |
| Transformed VI (TVI) | [29] | |
| False color VI (FCVI) | [30] | |
| Modified soil adjusted VI (MSAVI) | [31] | |
| Enhanced VI (EVI) | [32] | |
| Modified chlorophyll absorption in reflectance index (MCARI) | [33] | |
| Ratio VI (RVI) | [34] | |
| Modified simple ratio (MSR) | [35] | |
| Structure-intensive pigment index (SIPI) | [36] | |
| Difference VI (DVI) | [34] |
| Model | The Number of Variables | New Shoot Growth Stage | Flowering Stage | Fruit Expansion Stage | Veraison and Maturity Stage | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RRMSE | WIA | R2 | RRMSE | WIA | R2 | RRMSE | WIA | R2 | RRMSE | WIA | ||
| PLS | 17 | 0.190 | 0.000 | 0.002 | 0.218 | 0.000 | 0.000 | 0.485 | 0.000 | 0.000 | 0.141 | 0.000 | 0.001 |
| 7 | 0.570 | 0.097 | 0.829 | 0.345 | 0.139 | 0.756 | 0.594 | 0.230 | 0.871 | 0.499 | 0.244 | 0.848 | |
| 6 | 0.568 | 0.097 | 0.829 | 0.321 | 0.144 | 0.745 | 0.572 | 0.250 | 0.862 | 0.498 | 0.245 | 0.847 | |
| 5 | 0.563 | 0.097 | 0.827 | 0.427 | 0.120 | 0.772 | 0.602 | 0.203 | 0.871 | 0.494 | 0.249 | 0.845 | |
| 4 | 0.532 | 0.092 | 0.826 | 0.431 | 0.120 | 0.774 | 0.615 | 0.227 | 0.871 | 0.496 | 0.245 | 0.847 | |
| 3 | 0.560 | 0.090 | 0.844 | 0.452 | 0.117 | 0.777 | 0.598 | 0.233 | 0.865 | 0.524 | 0.244 | 0.850 | |
| 2 | 0.563 | 0.089 | 0.829 | 0.466 | 0.116 | 0.785 | 0.550 | 0.247 | 0.848 | 0.441 | 0.246 | 0.791 | |
| 1 | 0.576 | 0.088 | 0.830 | 0.462 | 0.116 | 0.785 | 0.546 | 0.248 | 0.845 | 0.436 | 0.248 | 0.788 | |
| RF | 17 | 0.626 | 0.088 | 0.892 | 0.516 | 0.126 | 0.862 | 0.654 | 0.216 | 0.896 | 0.704 | 0.189 | 0.916 |
| 7 | 0.616 | 0.085 | 0.894 | 0.490 | 0.113 | 0.803 | 0.682 | 0.211 | 0.905 | 0.713 | 0.186 | 0.915 | |
| 6 | 0.655 | 0.068 | 0.914 | 0.451 | 0.117 | 0.787 | 0.688 | 0.209 | 0.907 | 0.707 | 0.188 | 0.911 | |
| 5 | 0.665 | 0.067 | 0.910 | 0.485 | 0.113 | 0.799 | 0.684 | 0.210 | 0.906 | 0.701 | 0.190 | 0.912 | |
| 4 | 0.671 | 0.068 | 0.916 | 0.508 | 0.111 | 0.809 | 0.710 | 0.198 | 0.908 | 0.694 | 0.194 | 0.910 | |
| 3 | 0.630 | 0.074 | 0.898 | 0.418 | 0.121 | 0.771 | 0.691 | 0.204 | 0.901 | 0.725 | 0.172 | 0.917 | |
| 2 | 0.625 | 0.074 | 0.896 | 0.477 | 0.115 | 0.801 | 0.494 | 0.263 | 0.823 | 0.631 | 0.200 | 0.879 | |
| 1 | 0.410 | 0.098 | 0.820 | 0.525 | 0.111 | 0.838 | 0.514 | 0.257 | 0.831 | 0.633 | 0.200 | 0.884 | |
| SVM | 17 | 0.589 | 0.079 | 0.879 | 0.608 | 0.101 | 0.878 | 0.706 | 0.180 | 0.903 | 0.707 | 0.188 | 0.919 |
| 7 | 0.357 | 0.174 | 0.700 | 0.589 | 0.108 | 0.864 | 0.702 | 0.210 | 0.900 | 0.712 | 0.187 | 0.902 | |
| 6 | 0.703 | 0.062 | 0.919 | 0.603 | 0.105 | 0.869 | 0.682 | 0.203 | 0.903 | 0.710 | 0.187 | 0.904 | |
| 5 | 0.583 | 0.078 | 0.884 | 0.658 | 0.095 | 0.891 | 0.726 | 0.179 | 0.911 | 0.744 | 0.178 | 0.916 | |
| 4 | 0.562 | 0.080 | 0.878 | 0.584 | 0.109 | 0.856 | 0.658 | 0.203 | 0.895 | 0.719 | 0.195 | 0.912 | |
| 3 | 0.528 | 0.084 | 0.872 | 0.375 | 0.134 | 0.775 | 0.705 | 0.187 | 0.913 | 0.742 | 0.180 | 0.918 | |
| 2 | 0.551 | 0.086 | 0.886 | 0.356 | 0.136 | 0.767 | 0.544 | 0.230 | 0.849 | 0.592 | 0.214 | 0.839 | |
| 1 | 0.485 | 0.093 | 0.839 | 0.538 | 0.114 | 0.853 | 0.544 | 0.229 | 0.846 | 0.367 | 0.262 | 0.740 | |
| ELM | 17 | 0.700 | 0.076 | 0.914 | 0.803 | 0.075 | 0.923 | 0.780 | 0.167 | 0.943 | 0.725 | 0.122 | 0.905 |
| 7 | 0.721 | 0.060 | 0.938 | 0.800 | 0.073 | 0.933 | 0.792 | 0.164 | 0.938 | 0.806 | 0.118 | 0.945 | |
| 6 | 0.499 | 0.089 | 0.866 | 0.812 | 0.071 | 0.937 | 0.800 | 0.160 | 0.943 | 0.853 | 0.113 | 0.955 | |
| 5 | 0.510 | 0.090 | 0.872 | 0.809 | 0.072 | 0.934 | 0.791 | 0.164 | 0.940 | 0.171 | 0.365 | 0.650 | |
| 4 | 0.533 | 0.084 | 0.878 | 0.803 | 0.072 | 0.936 | 0.791 | 0.165 | 0.938 | 0.006 | 0.760 | 0.248 | |
| 3 | 0.595 | 0.077 | 0.900 | 0.050 | 7.838 | 0.001 | 0.806 | 0.165 | 0.936 | 0.216 | 0.302 | 0.687 | |
| 2 | 0.559 | 0.089 | 0.884 | 0.002 | 0.831 | 0.155 | 0.316 | 0.623 | 0.623 | 0.579 | 0.215 | 0.852 | |
| 1 | 0.458 | 0.092 | 0.836 | 0.577 | 0.103 | 0.857 | 0.564 | 0.243 | 0.854 | 0.101 | 4.237 | 0.008 | |
| Model | The Number of Variables | New Shoot Growth Stage | Flowering Stage | Fruit Expansion Stage | Veraison and Maturity Stage | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RRMSE | WIA | R2 | RRMSE | WIA | R2 | RRMSE | WIA | R2 | RRMSE | WIA | ||
| PLS | 17 | 0.162 | 0.000 | 0.000 | 0.368 | 0.000 | 0.011 | 0.179 | 0.000 | 0.002 | 0.318 | 0.000 | 0.000 |
| 7 | 0.489 | 0.133 | 0.823 | 0.734 | 0.153 | 0.923 | 0.496 | 0.186 | 0.891 | 0.625 | 0.169 | 0.877 | |
| 6 | 0.477 | 0.135 | 0.817 | 0.720 | 0.160 | 0.917 | 0.502 | 0.188 | 0.890 | 0.620 | 0.170 | 0.877 | |
| 5 | 0.482 | 0.135 | 0.820 | 0.728 | 0.157 | 0.917 | 0.509 | 0.187 | 0.891 | 0.661 | 0.156 | 0.879 | |
| 4 | 0.482 | 0.135 | 0.820 | 0.737 | 0.155 | 0.919 | 0.516 | 0.198 | 0.889 | 0.660 | 0.156 | 0.879 | |
| 3 | 0.499 | 0.132 | 0.826 | 0.743 | 0.153 | 0.921 | 0.553 | 0.180 | 0.836 | 0.671 | 0.153 | 0.887 | |
| 2 | 0.487 | 0.132 | 0.826 | 0.727 | 0.157 | 0.916 | 0.501 | 0.204 | 0.864 | 0.612 | 0.164 | 0.866 | |
| 1 | 0.453 | 0.139 | 0.807 | 0.697 | 0.167 | 0.909 | 0.494 | 0.206 | 0.859 | 0.622 | 0.163 | 0.865 | |
| RF | 17 | 0.564 | 0.121 | 0.882 | 0.757 | 0.150 | 0.926 | 0.553 | 0.167 | 0.891 | 0.734 | 0.131 | 0.917 |
| 7 | 0.586 | 0.118 | 0.890 | 0.777 | 0.144 | 0.932 | 0.545 | 0.203 | 0.890 | 0.722 | 0.134 | 0.916 | |
| 6 | 0.578 | 0.120 | 0.886 | 0.775 | 0.144 | 0.931 | 0.661 | 0.165 | 0.889 | 0.753 | 0.132 | 0.920 | |
| 5 | 0.575 | 0.120 | 0.885 | 0.779 | 0.143 | 0.933 | 0.601 | 0.176 | 0.897 | 0.701 | 0.145 | 0.902 | |
| 4 | 0.662 | 0.108 | 0.892 | 0.787 | 0.140 | 0.936 | 0.695 | 0.159 | 0.899 | 0.640 | 0.159 | 0.880 | |
| 3 | 0.594 | 0.118 | 0.864 | 0.790 | 0.135 | 0.939 | 0.683 | 0.182 | 0.897 | 0.633 | 0.161 | 0.875 | |
| 2 | 0.519 | 0.129 | 0.836 | 0.789 | 0.141 | 0.935 | 0.654 | 0.189 | 0.887 | 0.659 | 0.155 | 0.884 | |
| 1 | 0.481 | 0.138 | 0.822 | 0.696 | 0.173 | 0.907 | 0.578 | 0.211 | 0.856 | 0.618 | 0.165 | 0.868 | |
| SVM | 17 | 0.624 | 0.115 | 0.879 | 0.774 | 0.154 | 0.926 | 0.530 | 0.219 | 0.879 | 0.755 | 0.151 | 0.910 |
| 7 | 0.549 | 0.138 | 0.855 | 0.744 | 0.161 | 0.913 | 0.546 | 0.218 | 0.870 | 0.806 | 0.131 | 0.925 | |
| 6 | 0.639 | 0.113 | 0.888 | 0.723 | 0.166 | 0.906 | 0.545 | 0.217 | 0.869 | 0.816 | 0.116 | 0.945 | |
| 5 | 0.640 | 0.113 | 0.889 | 0.720 | 0.166 | 0.906 | 0.573 | 0.200 | 0.860 | 0.805 | 0.135 | 0.928 | |
| 4 | 0.581 | 0.126 | 0.859 | 0.654 | 0.185 | 0.880 | 0.591 | 0.181 | 0.835 | 0.680 | 0.173 | 0.866 | |
| 3 | 0.611 | 0.115 | 0.861 | 0.594 | 0.200 | 0.858 | 0.519 | 0.199 | 0.867 | 0.692 | 0.170 | 0.871 | |
| 2 | 0.488 | 0.139 | 0.825 | 0.660 | 0.202 | 0.867 | 0.550 | 0.192 | 0.877 | 0.697 | 0.168 | 0.874 | |
| 1 | 0.481 | 0.139 | 0.828 | 0.720 | 0.160 | 0.916 | 0.525 | 0.202 | 0.870 | 0.647 | 0.176 | 0.852 | |
| ELM | 17 | 0.584 | 0.111 | 0.869 | 0.806 | 0.135 | 0.946 | 0.701 | 0.176 | 0.915 | 0.782 | 0.154 | 0.943 |
| 7 | 0.549 | 0.117 | 0.857 | 0.803 | 0.136 | 0.944 | 0.759 | 0.162 | 0.932 | 0.801 | 0.147 | 0.942 | |
| 6 | 0.548 | 0.115 | 0.856 | 0.801 | 0.137 | 0.944 | 0.713 | 0.174 | 0.914 | 0.449 | 0.405 | 0.746 | |
| 5 | 0.613 | 0.102 | 0.879 | 0.800 | 0.136 | 0.943 | 0.546 | 0.279 | 0.838 | 0.562 | 0.244 | 0.862 | |
| 4 | 0.582 | 0.117 | 0.871 | 0.810 | 0.135 | 0.940 | 0.598 | 0.212 | 0.867 | 0.310 | 0.983 | 0.465 | |
| 3 | 0.504 | 0.125 | 0.826 | 0.578 | 0.243 | 0.856 | 0.522 | 0.237 | 0.850 | 0.276 | 0.618 | 0.583 | |
| 2 | 0.369 | 0.204 | 0.747 | 0.501 | 0.215 | 0.825 | 0.102 | 0.420 | 0.611 | 0.108 | 2.415 | 0.000 | |
| 1 | 0.485 | 0.135 | 0.823 | 0.345 | 0.264 | 0.777 | 0.376 | 0.363 | 0.732 | 0.084 | 4.147 | 0.015 | |
| Model | The Number of Variables | New Shoot Growth Stage | Flowering Stage | Fruit Expansion Stage | Veraison and Maturity Stage | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R2 | RRMSE | WIA | R2 | RRMSE | WIA | R2 | RRMSE | WIA | R2 | RRMSE | WIA | ||
| PLS | 17 | 0.130 | 0.000 | 0.002 | 0.026 | 0.000 | 0.000 | 0.205 | 0.000 | 0.001 | 0.490 | 0.000 | 0.002 |
| 7 | 0.496 | 0.141 | 0.842 | 0.538 | 0.168 | 0.829 | 0.459 | 0.198 | 0.777 | 0.471 | 0.225 | 0.780 | |
| 6 | 0.496 | 0.143 | 0.840 | 0.538 | 0.168 | 0.825 | 0.477 | 0.194 | 0.796 | 0.453 | 0.229 | 0.782 | |
| 5 | 0.571 | 0.129 | 0.846 | 0.553 | 0.165 | 0.835 | 0.480 | 0.194 | 0.799 | 0.497 | 0.202 | 0.788 | |
| 4 | 0.571 | 0.129 | 0.846 | 0.559 | 0.164 | 0.840 | 0.542 | 0.180 | 0.835 | 0.554 | 0.192 | 0.805 | |
| 3 | 0.596 | 0.125 | 0.849 | 0.570 | 0.162 | 0.844 | 0.619 | 0.188 | 0.897 | 0.569 | 0.191 | 0.803 | |
| 2 | 0.501 | 0.139 | 0.849 | 0.560 | 0.164 | 0.844 | 0.466 | 0.197 | 0.776 | 0.585 | 0.189 | 0.809 | |
| 1 | 0.491 | 0.143 | 0.837 | 0.493 | 0.176 | 0.813 | 0.476 | 0.195 | 0.777 | 0.568 | 0.191 | 0.803 | |
| RF | 17 | 0.595 | 0.122 | 0.879 | 0.673 | 0.157 | 0.899 | 0.612 | 0.156 | 0.893 | 0.560 | 0.186 | 0.822 |
| 7 | 0.540 | 0.132 | 0.889 | 0.653 | 0.179 | 0.908 | 0.640 | 0.166 | 0.894 | 0.538 | 0.191 | 0.817 | |
| 6 | 0.642 | 0.118 | 0.880 | 0.649 | 0.181 | 0.905 | 0.677 | 0.151 | 0.891 | 0.513 | 0.195 | 0.805 | |
| 5 | 0.563 | 0.130 | 0.852 | 0.701 | 0.133 | 0.902 | 0.683 | 0.150 | 0.895 | 0.509 | 0.196 | 0.801 | |
| 4 | 0.558 | 0.131 | 0.850 | 0.711 | 0.134 | 0.901 | 0.705 | 0.175 | 0.906 | 0.525 | 0.193 | 0.807 | |
| 3 | 0.550 | 0.132 | 0.844 | 0.578 | 0.161 | 0.849 | 0.683 | 0.152 | 0.889 | 0.562 | 0.187 | 0.815 | |
| 2 | 0.527 | 0.135 | 0.831 | 0.558 | 0.165 | 0.843 | 0.666 | 0.155 | 0.887 | 0.606 | 0.169 | 0.823 | |
| 1 | 0.497 | 0.140 | 0.819 | 0.527 | 0.170 | 0.822 | 0.433 | 0.219 | 0.802 | 0.407 | 0.214 | 0.765 | |
| SVM | 17 | 0.575 | 0.141 | 0.829 | 0.709 | 0.121 | 0.890 | 0.578 | 0.187 | 0.827 | 0.199 | 0.290 | 0.695 |
| 7 | 0.602 | 0.128 | 0.872 | 0.758 | 0.117 | 0.928 | 0.659 | 0.178 | 0.884 | 0.514 | 0.203 | 0.846 | |
| 6 | 0.610 | 0.128 | 0.874 | 0.789 | 0.120 | 0.922 | 0.569 | 0.182 | 0.837 | 0.490 | 0.217 | 0.834 | |
| 5 | 0.610 | 0.142 | 0.826 | 0.781 | 0.114 | 0.931 | 0.576 | 0.178 | 0.833 | 0.326 | 0.251 | 0.757 | |
| 4 | 0.610 | 0.142 | 0.826 | 0.800 | 0.110 | 0.941 | 0.527 | 0.188 | 0.814 | 0.526 | 0.208 | 0.847 | |
| 3 | 0.619 | 0.142 | 0.823 | 0.652 | 0.159 | 0.896 | 0.525 | 0.187 | 0.813 | 0.537 | 0.199 | 0.852 | |
| 2 | 0.580 | 0.144 | 0.827 | 0.649 | 0.176 | 0.886 | 0.173 | 0.257 | 0.597 | 0.039 | 0.383 | 0.529 | |
| 1 | 0.570 | 0.153 | 0.810 | 0.511 | 0.175 | 0.828 | 0.225 | 0.243 | 0.671 | 0.111 | 1.944 | 0.166 | |
| ELM | 17 | 0.581 | 0.121 | 0.879 | 0.778 | 0.130 | 0.916 | 0.778 | 0.122 | 0.904 | 0.551 | 0.198 | 0.773 |
| 7 | 0.664 | 0.117 | 0.900 | 0.795 | 0.115 | 0.909 | 0.780 | 0.130 | 0.919 | 0.615 | 0.185 | 0.807 | |
| 6 | 0.634 | 0.125 | 0.888 | 0.784 | 0.121 | 0.908 | 0.787 | 0.128 | 0.924 | 0.775 | 0.166 | 0.884 | |
| 5 | 0.161 | 0.214 | 0.659 | 0.781 | 0.121 | 0.902 | 0.782 | 0.130 | 0.921 | 0.601 | 0.179 | 0.837 | |
| 4 | 0.274 | 0.183 | 0.735 | 0.824 | 0.106 | 0.942 | 0.800 | 0.120 | 0.939 | 0.633 | 0.176 | 0.836 | |
| 3 | 0.508 | 0.157 | 0.834 | 0.197 | 0.370 | 0.582 | 0.482 | 0.278 | 0.791 | 0.629 | 0.172 | 0.854 | |
| 2 | 0.582 | 0.127 | 0.860 | 0.034 | 0.555 | 0.360 | 0.403 | 0.218 | 0.802 | 0.596 | 0.177 | 0.865 | |
| 1 | 0.536 | 0.134 | 0.834 | 0.514 | 0.173 | 0.821 | 0.462 | 0.201 | 0.809 | 0.549 | 0.200 | 0.837 | |
| Growth Stage | Model | Response Variables | Predictive Variables | R2 | RRMSE | WIA |
|---|---|---|---|---|---|---|
| New shoot growth stage | PLS | LNC | FCVI | 0.576 | 0.088 | 0.830 |
| LKC | SIPI, FCVI, DVI | 0.499 | 0.132 | 0.826 | ||
| LPC | DVI, MSAVI, OSAVI | 0.596 | 0.125 | 0.849 | ||
| RF | LNC | FCVI, DVI, NIR900, MSAVI | 0.671 | 0.068 | 0.916 | |
| LKC | SIPI, FCVI, DVI, NIR900 | 0.662 | 0.108 | 0.892 | ||
| LPC | DVI, MSAVI, OSAVI, NDVI, MSR, SIPI | 0.642 | 0.118 | 0.880 | ||
| SVM | LNC | FCVI, DVI, NIR900, MSAVI, OSAVI, NDVI | 0.703 | 0.062 | 0.919 | |
| LKC | SIPI, FCVI, DVI, NIR900, MSAVI | 0.640 | 0.113 | 0.889 | ||
| LPC | DVI, MSAVI, OSAVI | 0.619 | 0.142 | 0.823 | ||
| ELM | LNC | FCVI, DVI, NIR900, MSAVI, OSAVI, NDVI, G | 0.721 | 0.060 | 0.938 | |
| LKC | SIPI, FCVI, DVI, NIR900, MSAVI | 0.613 | 0.102 | 0.879 | ||
| LPC | DVI, MSAVI, OSAVI, NDVI, MSR, SIPI, R | 0.664 | 0.117 | 0.900 | ||
| Flowering stage | PLS | LNC | SIPI, RVI | 0.466 | 0.116 | 0.785 |
| LKC | B, G, SIPI | 0.743 | 0.153 | 0.921 | ||
| LPC | B, G, DVI | 0.570 | 0.162 | 0.844 | ||
| RF | LNC | SIPI | 0.525 | 0.111 | 0.838 | |
| LKC | B, G, SIPI | 0.790 | 0.135 | 0.939 | ||
| LPC | B, G, DVI, SIPI | 0.711 | 0.134 | 0.901 | ||
| SVM | LNC | SIPI, RVI, OSAVI, MCARI, MSAVI | 0.658 | 0.095 | 0.891 | |
| LKC | B | 0.720 | 0.160 | 0.916 | ||
| LPC | B, G, DVI, SIPI | 0.800 | 0.110 | 0.941 | ||
| ELM | LNC | SIPI, RVI, OSAVI, MCARI, MSAVI, NDVI | 0.812 | 0.071 | 0.937 | |
| LKC | B, G, SIPI, DVI | 0.810 | 0.135 | 0.940 | ||
| LPC | B, G, DVI, SIPI | 0.824 | 0.106 | 0.942 | ||
| Fruit expansion stage | PLS | LNC | MCARI, TVI, RE, MSAVI | 0.615 | 0.227 | 0.871 |
| LKC | MSAVI, DVI, OSAVI | 0.553 | 0.18 | 0.836 | ||
| LPC | SIPI, MCARI, R | 0.619 | 0.188 | 0.897 | ||
| RF | LNC | MCARI, TVI, RE, MSAVI | 0.710 | 0.198 | 0.908 | |
| LKC | MSAVI, DVI, OSAVI, NDVI | 0.695 | 0.159 | 0.899 | ||
| LPC | SIPI, MCARI, R, B | 0.705 | 0.175 | 0.906 | ||
| SVM | LNC | MCARI, TVI, RE, MSAVI, OSAVI | 0.726 | 0.179 | 0.911 | |
| LKC | MSAVI, DVI, OSAVI, NDVI | 0.591 | 0.181 | 0.835 | ||
| LPC | SIPI, MCARI, R, B, NDVI, MSR, OSAVI | 0.659 | 0.178 | 0.884 | ||
| ELM | LNC | MCARI, TVI, RE | 0.806 | 0.165 | 0.936 | |
| LKC | MSAVI, DVI, OSAVI, NDVI, SIPI, MSR, FCVI | 0.759 | 0.162 | 0.932 | ||
| LPC | SIPI, MCARI, R, B | 0.800 | 0.120 | 0.939 | ||
| Veraison and maturity stage | PLS | LNC | B, SIPI, G | 0.524 | 0.244 | 0.850 |
| LKC | RE, MCARI, TVI | 0.671 | 0.153 | 0.887 | ||
| LPC | FCVI, RVI, MSR | 0.585 | 0.189 | 0.809 | ||
| RF | LNC | B, SIPI, G | 0.725 | 0.172 | 0.917 | |
| LKC | RE, MCARI(6) | 0.753 | 0.132 | 0.92 | ||
| LPC | FCVI, RVI | 0.606 | 0.169 | 0.823 | ||
| SVM | LNC | B, SIPI, G | 0.742 | 0.180 | 0.918 | |
| LKC | RE, MCARI, TVI, RVI, MSR, R | 0.816 | 0.116 | 0.945 | ||
| LPC | FCVI, RVI, MSR | 0.537 | 0.199 | 0.852 | ||
| ELM | LNC | B, SIPI, G, FCVI, OSAVI, NDVI | 0.853 | 0.113 | 0.955 | |
| LKC | RE, MCARI, TVI, RVI, MSR, R, MSAVI | 0.801 | 0.147 | 0.942 | ||
| LPC | FCVI, RVI, MSR, NDVI, EVI, R | 0.775 | 0.166 | 0.884 |
| Model | Response Variables | d-Factor | |||||
|---|---|---|---|---|---|---|---|
| New Shoot Growth Stage | Flowering Stage | Fruit Expansion Stage | Veraison and Maturity Stage | Average Value of Xi | Average Value | ||
| PLS | LNC | 0.663 | 0.292 | 0.274 | 0.186 | 0.354 | 0.319 |
| LKC | 0.515 | 0.168 | 0.288 | 0.195 | 0.292 | ||
| LPC | 0.482 | 0.212 | 0.195 | 0.356 | 0.311 | ||
| RF | LNC | 0.634 | 0.291 | 0.249 | 0.163 | 0.334 | 0.302 |
| LKC | 0.489 | 0.160 | 0.280 | 0.194 | 0.281 | ||
| LPC | 0.468 | 0.197 | 0.187 | 0.310 | 0.291 | ||
| SVM | LNC | 0.646 | 0.285 | 0.270 | 0.160 | 0.340 | 0.307 |
| LKC | 0.502 | 0.171 | 0.288 | 0.189 | 0.288 | ||
| LPC | 0.476 | 0.188 | 0.182 | 0.323 | 0.292 | ||
| ELM | LNC | 0.621 | 0.271 | 0.267 | 0.157 | 0.329 | 0.301 |
| LKC | 0.512 | 0.164 | 0.274 | 0.203 | 0.288 | ||
| LPC | 0.487 | 0.186 | 0.180 | 0.290 | 0.286 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, X.; Chen, D.; Zhou, Z.; Zhang, Z.; Xu, C.; Zha, Q.; Wang, F.; Hu, X. Prediction of the Nitrogen, Phosphorus and Potassium Contents in Grape Leaves at Different Growth Stages Based on UAV Multispectral Remote Sensing. Remote Sens. 2022, 14, 2659. https://doi.org/10.3390/rs14112659
Peng X, Chen D, Zhou Z, Zhang Z, Xu C, Zha Q, Wang F, Hu X. Prediction of the Nitrogen, Phosphorus and Potassium Contents in Grape Leaves at Different Growth Stages Based on UAV Multispectral Remote Sensing. Remote Sensing. 2022; 14(11):2659. https://doi.org/10.3390/rs14112659
Chicago/Turabian StylePeng, Xuelian, Dianyu Chen, Zhenjiang Zhou, Zhitao Zhang, Can Xu, Qing Zha, Fang Wang, and Xiaotao Hu. 2022. "Prediction of the Nitrogen, Phosphorus and Potassium Contents in Grape Leaves at Different Growth Stages Based on UAV Multispectral Remote Sensing" Remote Sensing 14, no. 11: 2659. https://doi.org/10.3390/rs14112659