
Design of a Local Nested Grid for the Optimal Combined Use of Landsat 8 and Sentinel 2 Data

 , , , ,
, , , , 
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Case Studies: The Duero River Basin and the Groundwater Mancha Oriental
2.2. Satellite Data: L8 and S2
2.3. Design of the LNG
2.3.1. Global Web Mercator Tiling Schema
2.3.2. The Proposed Tiling Schema
- CRS EPSG Code: 25830, projected CRS: UTM zone 30 North. Geographic base CRS EPSG Code: 4258 (ETRS89).
- Recursive ratio factor in LODs: 3
- Ground Sampling Distance (GSD) for the maximum LOD: 10 m
- Tile dimensions: 256 × 256 (rows × columns)
- ROI definition: This initial ROI covers the entire Iberian Peninsula, the Balearic Islands and the autonomous cities of Ceuta and Melilla, so that the defined LNG can be used for any project in Spain, except for the Canary Islands. The parameters for the ROI definition are as follows: NW longitude −10 DEG, NW latitude 44 DEG. Projected width: 1500 km. Maximum raster size: 183 km (L8). Then, a ROI is defined specifically for this project, which is the Spanish part of the Duero river basin and the groundwater Mancha Oriental.
2.3.3. Definition of the Tiling Schema: The Tuplekeys
- Obtaining the NW point in the projected CRS.
- Translation of the NW point: the NW point is translated in the projected CRS. The maximum size of the raster is subtracted from the X coordinate and added to the Y coordinate. In this way, the bounding box of a maximum size is fully integrated. Subsequently, the NW point is moved in the projected CRS to get its coordinates as integers and multiples of the GSD for the maximum LOD (in this case 10 m as the MSR of S2).
- Determination of the ROI: it is obtained as the sum of the initial area and the maximum size of the raster, resulting in this case 1683 km.
- Determination of the Region of Grid (ROG): it must be equal to or greater than the ROI and correspond to a certain LOD. Computed LOD is 6, corresponding to the MSR of S2, 10 m GSD, and 256 × 256 pixels. The geometry of the ROG and ROI is stored in a report file of results.
- Assessment of the suitability of the chosen projected CRS: For the four corners of the ROG and ROI, the linear deformation of the projected CRS is obtained. The corresponding GSD on the ellipsoid is calculated for the GSD of the LOD of MSR. For any case study in Spain, the chosen projected CRS is suitable since the maximum difference is around 10 cm (1%) within the ROG, and less than 1% within the ROI.
2.3.4. Selection of the Storage LOD
- The files that reach LOD 6, corresponding to the MSR of S2, will have dimensions of 256 × 256.
- The files that reach LOD 5, corresponding to the MSR of L8, will have dimensions of 768 × 768, (768 = 256 × 3). The size of these files on disk without compression will be of the order of 2.25 Mb for floating type (32 bits), 1.12 Mb for unsigned integer (16 bits) and 0.6 Mb for byte type.
- The files that reach LOD 4 will have dimensions of 2304 × 2304, (2304 = 256 × 3 × 3). The size of these files on disk without compression will be of the order of 20 Mb for floating type (32 bits), 10 Mb for unsigned integer (16 bits) and 5 Mb for byte type.
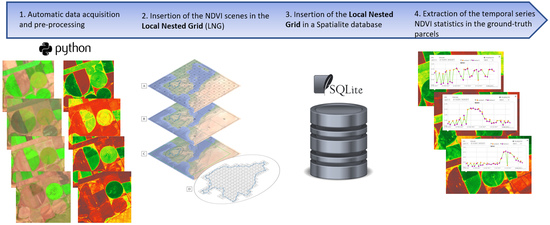
2.4. Processing Methodology
- Automatic downloading of all the EO products and pre-processing of the raw bands, obtaining directly the NDVI values.
- Operating only in one zone, the one corresponding to most of the study area (zone 30), which corresponds to the EPSG 25830 projection.
- Initial conversion of the pixel corners’ coordinates into integer numbers at all LODs up to the MSR of the satellite missions used.
- Perfect alignment of the pixels at the same spatial resolution and at different LODs up to the MSR of the satellite missions used, so that a pixel of L8 (30 × 30 m) includes exactly 9 pixels of S2 (10 × 10 m), as a 3 × 3 matrix.
- Image resampling based on a bilinear interpolation method, used only for the computation of NDVI values in each satellite mission. During this resampling method, the radiometric resolution can be fixed to the original one or reduced to 8 bits for other types of products, such as combinations of images for photointerpretation.
- Finally, a conversion to Cloud Optimized GeoTIFF (COG) format is applied. COG is a regular GeoTIFF file, aimed at being hosted on a HTTP file server, with an internal organization that enables more efficient workflows on the cloud.
2.4.1. Automatic Data Acquisition and Pre-Processing
2.4.2. Insertion of the NDVI Scenes in the LNG
- The type of product and the date are retrieved from the file name, checking its validity.
- The CRS of the LNG is reprojected.
- The storage LOD and the MSR LOD are established based on the GSD.
- The relation of tiles is obtained based on the storage LOD and the bounding box of the file.
- For each tile, using GDAL tools, the resulting file is created by extracting the plot corresponding to its boundary and using the parameters defined in the project file: data type, resampling method, internal tiling, and compression algorithm. In particular, through the gdal_translate command the image values are rescaled, so that the maximum value of NDVI is 1.0. Furthermore, with the a_scale and a_offset parameters the LNG software converts the digital levels on the fly, so that even if a value is stored as an integer (8 bits), the value shown by the LNG software will be the original one. Finally, the files are converted to COG format and compressed.
- If the pixels within the resulting file have a null value, the file is deleted. This happens in the wedge areas, especially in L8-derived NDVI products.
- Finally, using gdaladdo, pyramid levels are added with the number of steps equal to that between the storage LOD and the MSR LOD. For this case, one for the L8 NDVI products and two for the S2 NDVI products.
2.4.3. Inserting the LNG Structure into a SpatiaLite Database
- Insertion of the information of the L8 and S2 NDVI products from the XML file generated in the previous step.
- Region of Ground-Truth Plot Files (ROGTPF) in shapefile format. The fields that include the information to be inserted for each plot must be indicated: unique identifier and crop code.
2.4.4. Time Series Extraction of NDVI Statistics on Ground-Truth Plots
- The relationship of all ROGTPFs s is obtained, together with all the necessary data.
- Two containers are defined: one for ROGTPFs and one for Tiles.
- In the ROGTPFs container, the list of tiles that contains is inserted for each ROGTPF.
- In the tile container, the list of ROGTPFs that contains, totally or partially, is stored for each tile. These steps involve simple spatial operations.
- For each tile, each NDVI file is sequentially opened.
- ROGTPFs affected by this tile are recovered.
- For each ROGTPF, the interior pixels are determined by a spatial operation.
- The date and mission of the NDVI file are extracted and stored in a container for each ROGTPF, which will be updated with the values of other tiles. These values constitute the sample on which the statistics will be performed.
- From the ROGTPF container that includes the list of tiles, the tile that has just been processed is removed.
- If there is no tile left to process, the extraction of samples of NDVI values by date and mission is completed, and the statistics are obtained and stored: mean and standard deviation.
3. Results
3.1. LNG Definition Tool
3.2. Insertion of the NDVI Scenes in the LNG
3.3. Extraction of Time Series of NDVI Statistics in Ground-Truth Plots for Calibration of the Crop Classification Model
3.4. Analysis of LNG Approach
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Commission. Europe in a Changing World-Inclusive, Innovative and Reflective Societies; Decision C (2020)6320 of 17 September 2020. Work Programme 2018–2020 13; European Commission: Luxembourg, 2020. [Google Scholar]
- United Nations. Treaty Collection. Chapter XXVII—Environment: 7.d Paris Agreement; United Nations: Paris, France, 2016. [Google Scholar]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef] [Green Version]
- van der Werff, H.; van der Meer, F. Sentinel-2A MSI and Landsat 8 OLI Provide Data Continuity for Geological Remote Sensing. Remote Sens. 2016, 8, 883. [Google Scholar] [CrossRef] [Green Version]
- Piedelobo, L.; Ortega-Terol, D.; del Pozo, S.; Hernández-López, D.; Ballesteros, R.; Moreno, M.; Molina, J.-L.; González-Aguilera, D. HidroMap: A New Tool for Irrigation Monitoring and Management Using Free Satellite Imagery. Isprs Int. J. Geo-Inf. 2018, 7, 220. [Google Scholar] [CrossRef] [Green Version]
- Piedelobo, L.; Taramelli, A.; Schiavon, E.; Valentini, E.; Molina, J.-L.; Nguyen Xuan, A.; González-Aguilera, D. Assessment of Green Infrastructure in Riparian Zones Using Copernicus Programme. Remote Sens. 2019, 11, 2967. [Google Scholar] [CrossRef] [Green Version]
- Inglada, J.; Arias, M.; Tardy, B.; Hagolle, O.; Valero, S.; Morin, D.; Dedieu, G.; Sepulcre, G.; Bontemps, S.; Defourny, P.; et al. Assessment of an Operational System for Crop Type Map Production Using High Temporal and Spatial Resolution Satellite Optical Imagery. Remote Sens. 2015, 7, 12356–12379. [Google Scholar] [CrossRef] [Green Version]
- Piedelobo, L.; Hernández-López, D.; Ballesteros, R.; Chakhar, A.; Del Pozo, S.; González-Aguilera, D.; Moreno, M.A. Scalable pixel-based crop classification combining Sentinel-2 and Landsat-8 data time series: Case study of the Duero river basin. Agric. Syst. 2019, 171, 36–50. [Google Scholar] [CrossRef]
- Poussin, C.; Guigoz, Y.; Palazzi, E.; Terzago, S.; Chatenoux, B.; Giuliani, G. Snow Cover Evolution in the Gran Paradiso National Park, Italian Alps, Using the Earth Observation Data Cube. Data 2019, 4, 138. [Google Scholar] [CrossRef] [Green Version]
- Nazarova, T.; Martin, P.; Giuliani, G. Monitoring Vegetation Change in the Presence of High Cloud Cover with Sentinel-2 in a Lowland Tropical Forest Region in Brazil. Remote Sens. 2020, 12, 1829. [Google Scholar] [CrossRef]
- European Commission. Copernicus Market Report—February 2019. Prepared by PwC for the European Commission as Part of the Study ‘Update of the Copernicus Market Report‘; European Commission: Luxembourg, 2019. [Google Scholar]
- European Commission. Commission Staff Working Document. Expression of User Needs for the Copernicus Programme. SWD(2019) 394 Final; European Commission: Luxembourg, 2019. [Google Scholar]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 and Landsat 8 Imagery for a Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef] [Green Version]
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A note on the temporary misregistration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar] [CrossRef] [Green Version]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A Calibration and Products Validation Status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- Stumpf, A.; Michéa, D.; Malet, J.-P. Improved Co-Registration of Sentinel-2 and Landsat-8 Imagery for Earth Surface Motion Measurements. Remote Sens. 2018, 10, 160. [Google Scholar] [CrossRef] [Green Version]
- Purss, M.B.J.; Lewis, A.; Oliver, S.A.; Sixsmith, J.; Evans, B.; Edberg, R.; Frankish, G.; Hurst, L.; Chan, T. Unlocking the Australian Landsat Archive—From dark data to High Performance Data infrastructures. GeoResJ 2015, 6, 135–140. [Google Scholar] [CrossRef] [Green Version]
- Giuliani, G.; Chatenoux, B.; Bono, A.D.; Rodila, D.; Richard, J.-P.; Allenbach, K.; Dao, H.; Peduzzi, P. Building an Earth Observations Data Cube: Lessons learned from the Swiss Data Cube (SDC) on generating Analysis Ready Data (ARD). Big Earth Data. 2017, 1, 100–117. [Google Scholar] [CrossRef] [Green Version]
- Giuliani, G.; Masó, J.; Mazzetti, P.; Nativi, S.; Zabala, A. Paving the Way to Increased Interoperability of Earth Observations Data Cubes. Data 2019, 4, 113. [Google Scholar] [CrossRef] [Green Version]
- Navacchi, C.; Bauer-Marschallinger, B.; Wagner, W. Flood Monitoring using ACube—An Austrian Data Cube Solution. EGU Gen. Assem. 2020, 22, 21575. [Google Scholar]
- Picoli, M.; Simoes, R.; Chaves, M.; Santos, L.; Ipia, A.; Soares, A.; Sanches, I.; Ferreira, K.; Queiroz, G. CBERS DATA CUBE: A Powerfull Technology for Mapping and Monitoring Brazilian Biomes; Brazil’s National Institute for Space Research (INPE): São José dos Campos, Brazil, 2020; p. 539. [Google Scholar] [CrossRef]
- Maso, J.; Zabala, A.; Serral, I.; Pons, X. A Portal Offering Standard Visualization and Analysis on top of an Open Data Cube for Sub-National Regions: The Catalan Data Cube Example. Data 2019, 4, 96. [Google Scholar] [CrossRef] [Green Version]
- Giuliani, G.; Camara, G.; Killough, B.; Minchin, S. Earth Observation Data Cubes. In Book of the Special Issue Earth Observation Data Cubes, Data; MDPI: Basel, Switzerland, 2020; p. 302. [Google Scholar] [CrossRef] [Green Version]
- Earth Observation Data Cubes from GDAL Image Collection—Gdalcubes 0.2.0 Documentation. Available online: https://gdalcubes.github.io/docs/index.html (accessed on 17 December 2020).
- GitHub. Appelmar/Gdalcubes: Earth Observation Data Cubes from GDAL Image Collections. Available online: https://github.com/appelmar/gdalcubes (accessed on 17 December 2020).
- Appel, M.; Pebesma, E. On-Demand Processing of Data Cubes from Satellite Image Collections with the gdalcubes Library. Data 2019, 4, 92. [Google Scholar] [CrossRef] [Green Version]
- Villa, G.; Mas, S.; Fernández-Villarino, X.; Martínez-Luceño, J.; Ojeda, J.C.; Pérez-Martín, B.; Tejeiro, J.A.; García-González, C.; López-Romero, E.; Soteres, C. The need of nested grids for aerial and satellite images and digital elevation models. Isprs Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B2, 131–138. [Google Scholar] [CrossRef] [Green Version]
- Stefanakis, E. Web Mercator and raster tile maps: Two cornerstones of online map service providers. Geomatica 2017, 71, 100–109. [Google Scholar] [CrossRef]
- Battersby, S.E.; Finn, M.P.; Usery, E.L.; Yamamoto, K.H. Implications of Web Mercator and Its Use in Online Mapping. Cart. Int. J. Geogr. Inf. Geovis. 2014, 49, 85–101. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef] [Green Version]
- Xue, J.; Su, B. Significant remote sensing vegetation indices: A review of developments and applications. J. Sensors 2017, 2017. [Google Scholar] [CrossRef] [Green Version]
- Rouse, J.W.J.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. NASSP 1974, 351, 309. [Google Scholar]
- Yan, L.; Roy, D.; Zhang, H.; Li, J.; Huang, H. An Automated Approach for Sub-Pixel Registration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) Imagery. Remote Sens. 2016, 8, 520. [Google Scholar] [CrossRef] [Green Version]
- Dey, V.; Zhang, Y.; Zhong, M. A Review on Image Segmentation Techniques with Remote Sensing Perspective. In Proceedings of the ISPRS TC VII Symposium—100 Years ISPRS, Vienna, Austria, 5–7 July 2010; Wagner, W., Székely, B., Eds.; Institute of Photogrammetry and Remote Sensing, Vienna University of Technology: Vienna, Austria, 2010; Volume XXXVIII, Part 7A; p. 12. [Google Scholar]
- Stoimenov, L.; Djordjević-Kajan, S. An architecture for interoperable GIS use in a local community environment. Comput. Geosci. 2005, 31, 211–220. [Google Scholar] [CrossRef]
- van Oudenhoven, A.P.E.; Schröter, M.; Drakou, E.G.; Geijzendorffer, I.R.; Jacobs, S.; van Bodegom, P.M.; Chazee, L.; Czúcz, B.; Grunewald, K.; Lillebø, A.I.; et al. Key criteria for developing ecosystem service indicators to inform decision making. Ecol. Indic. 2018, 95, 417–426. [Google Scholar] [CrossRef]
- European Parliament. Regulation (EU) No 377/2014 of the European Parliament and of the Council of 3 April 2014 Establishing the Copernicus Programme and Repealing Regulation (EU) No 911/2010 Text with EEA Relevance; European Parliament: Brussels, Belgium, 2014; pp. 44–66. [Google Scholar]
- Haines, A.; Scheelbeek, P. European Green Deal: A major opportunity for health improvement. Lancet 2020, 395, 1327–1329. [Google Scholar] [CrossRef]
- Maes, J.; Teller, A.; Erhard, M.; Grizzetti, B.; Barredo, J.I.; Paracchini, M.L.; Condé, S.; Somma, F.; Orgiazzi, A.; Jones, A.; et al. Mapping and Assessment of Ecosystems and Their Services: An Analytical Framework for Mapping and Assessment of Ecosystem Condition in EU. Anal. Framew. Ecosyst. Assess. Action 2013, 5, 1–58. [Google Scholar]
- Herrero Lizano, J. Informe de Seguimiento del Plan Hidrológico de la Parte Española de la Demarcación Hidrográfica del Duero; Oficina de Planificación Hidrológica de la Confederación Hidrográfica del Duero: Valladolid, Spain, 2017. [Google Scholar]
- Ceballos, A.; Martínez-Fernández, J.; Luengo-Ugidos, M.Á. Analysis of rainfall trends and dry periods on a pluviometric gradient representative of Mediterranean climate in the Duero Basin, Spain. J. Arid Environ. 2004, 58, 215–233. [Google Scholar] [CrossRef]
- Fernández Pereira, J.; Rodríguez Arroyo, J.; del Barrio, V.; Ramos, M.; Castrillón, M.; Vaquerizo, E.; Trujillo, H.; Hernández, V.; Gómez, S.; Seisdedos, P.; et al. Plan Hidrológico de la Parte Española de la Demarcación Hidrográfica del Duero 2015–2021; Oficina de Planificación Hidrológica de la Confederación Hidrográfica del Duero: Valladolid, Spain, 2014. [Google Scholar]
- Samet, H. The Quadtree and Related Hierarchical Data Structures. Acm Comput. Surv. 1984, 16, 187–260. [Google Scholar] [CrossRef] [Green Version]
- Bing Maps Tile System. Bing Maps | Microsoft Docs. Available online: https://docs.microsoft.com/en-us/bingmaps/articles/bing-maps-tile-system#map-projection (accessed on 17 December 2020).
- MPC. Level 2A Data Quality Report S2 MPC; MPC: Toulouse, France, 2020. [Google Scholar]
- Ortega-Terol, D.; Perez-Martin, B. Hacia la implantación de una infraestructura de datos de imágenes de satélite en el Instituto Geográfico Nacional con Open Data Cube y QGIS. XI Jornadas Ibéricas de Infraestruturas de Datos Espaciales, JIIDE 2020, 28–30. [Google Scholar]
- Chatenoux, B.; Richard, J.-P.; Guigoz, Y.; Poussin, C.; Giuliani, G. Bringing Open Data Cube into Practice. Workshop Material; GRID-Geneva & University of Geneva: Geneva, Switzerland, 2019; 65p. [Google Scholar] [CrossRef]
- THE 17 GOALS. Sustainable Development. Available online: https://sdgs.un.org/goals (accessed on 13 April 2021).
- ESA. ESA and the Sustainable Development Goals. Available online: http://www.esa.int/Enabling_Support/Preparing_for_the_Future/Space_for_Earth/ESA_and_the_Sustainable_Development_Goals (accessed on 13 April 2021).
- Pérez Martín, B.; Serna Martínez, A.; Delgado Hernández, J.; Caballero García, M.; Villa Alcázar, G. El Programa Copernicus Para la Monitorización del Territorio y los Objetivos del Desarrollo Sostenible. Available online: https://www.ign.es/web/ign/portal/libros-digitales/programa-copernicus-monitorizacion-territorio (accessed on 13 April 2021).
- Kussul, N.; Lavreniuk, M.; Kolotii, A.; Skakun, S.; Rakoid, O.; Shumilo, L. A workflow for Sustainable Development Goals indicators assessment based on high-resolution satellite data. Int. J. Digit. Earth 2020, 13, 309–321. [Google Scholar] [CrossRef]
- Hakimdavar, R.; Hubbard, A.; Policelli, F.; Pickens, A.; Hansen, M.; Fatoyinbo, T.; Lagomasino, D.; Pahlevan, N.; Unninayar, S.; Kavvada, A.; et al. Monitoring Water-Related Ecosystems with Earth Observation Data in Support of Sustainable Development Goal (SDG) 6 Reporting. Remote Sens. 2020, 12, 1634. [Google Scholar] [CrossRef]
- Taramelli, A.; Valentini, E.; Piedelobo, L.; Marinelli, C.; Tornato, A.; Geraldini, S. CHIME—Hyperspectral Imaging Mission: Value-added offered by PRISMA. In AGU Fall Meeting Abstracts, Proceedings of the AGU Fall Meeting, Online Everywhere, 1–17 December 2020; American Geophysical Union: Washington, DC, USA, 2020.PRISMA. In AGU Fall Meeting Abstracts, Proceedings of the AGU Fall Meeting, Online Everywhere, 1–17 December 2020; American Geophysical Union: Washington, DC, USA, 2020. [Google Scholar]
- Cloud Optimized GeoTIFF. Available online: https://www.cogeo.org/ (accessed on 17 December 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Platform | Landsat 8 | Sentinel 2 |
|---|---|---|
| Sensor | Operational Land Imager (OLI) | Multispectral Instrument (MSI) |
| Scenes Duero river basin | Path/Row: 200/31, 201/30, 201/31, 201/32, 202/30, 202/31, 202/32, 203/30, 203/31, 203/32 and 204/31 | Granules: 29TPE, 29TPF, 29TPG, 29TQH, 30TTK, 30TTL, 30TTM, 30TUK, 30TUL, 30TUM, 30TUN, 30TVL, 30TVM, 30TVN, 30TWL, 30TWM; in orbits R37, R94 and R137 |
| Scenes groundwater Mancha Oriental | Path/Row: 199/33 | Granules: T30SWJ, T30SXJ; in orbits R51 and R94 |
| Scenes size | 170 × 185 km | 100 × 100 km |
| Band set used | Band 4 (Red: 630–680 nm) Band 5 (Near Infrared: 845–885 nm) | Band 4 (Red: 645–683 nm) Band 8 (Near Infrared: 762–907 nm) |
| Spatial resolution of the band set used | 30 m | 10 m |
| Temporal resolution | 16 days | 10 days (5 with 2 satellites) 1 |
| Radiometric resolution | 12 bits | 12 bits |
| NDVI Image | a | b |
|---|---|---|
| Satellite platform | Landsat 8 | Sentinel 2A |
| Date (yyyy/mm/dd) | 2017/08/20 | 2017/08/20 |
| Scene | 202/31 | T30TUM in orbit R137 |
| Dimensions | X: 768, Y: 768, Bands: 1 | X: 2304, Y: 2304, Bands: 1 |
| Extension (m) | 308,690, 4,617,960 331,730, 4,641,000 | 308,690, 4,617,960 331,730, 4,641,000 |
| Pixel size (m) | 30 | 10 |
| Duero River Basin | ||
| Satellite platform | With LNG | Without LNG |
| Sentinel 2 | 511.4 GB; 19,221 files | 526.2 GB; 1063 files |
| Landsat 8 | 43.9 GB; 28,415 files | 47.5 GB; 209 files |
| Groundwater Mancha Oriental–Jucar river basin | ||
| Satellite platform | With LNG | Without LNG |
| Sentinel 2 | 9.4 GB; 567 files | 9.6 GB; 20 files |
| Landsat 8 | 1.9 GB; 811 files | 2.3 GB; 10 files |
| Groundwater Mancha Oriental–Jucar river basin | ||
| Satellite platform | With LNG-COG | Without LNG |
| Sentinel 2 | 1.7 GB; 567 files | 9.6 GB; 20 files |
| Landsat 8 | 383 Mb; 811 files | 2.3 GB; 10 files |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández-López, D.; Piedelobo, L.; Moreno, M.A.; Chakhar, A.; Ortega-Terol, D.; González-Aguilera, D. Design of a Local Nested Grid for the Optimal Combined Use of Landsat 8 and Sentinel 2 Data. Remote Sens. 2021, 13, 1546. https://doi.org/10.3390/rs13081546
Hernández-López D, Piedelobo L, Moreno MA, Chakhar A, Ortega-Terol D, González-Aguilera D. Design of a Local Nested Grid for the Optimal Combined Use of Landsat 8 and Sentinel 2 Data. Remote Sensing. 2021; 13(8):1546. https://doi.org/10.3390/rs13081546
Chicago/Turabian StyleHernández-López, David, Laura Piedelobo, Miguel A. Moreno, Amal Chakhar, Damián Ortega-Terol, and Diego González-Aguilera. 2021. "Design of a Local Nested Grid for the Optimal Combined Use of Landsat 8 and Sentinel 2 Data" Remote Sensing 13, no. 8: 1546. https://doi.org/10.3390/rs13081546