
Partial Shape Recognition for Sea Ice Motion Retrieval in the Marginal Ice Zone from Sentinel-1 and Sentinel-2



Abstract
:1. Introduction
2. Data
2.1. Sentinel-1 Data
2.2. Sentinel-2 Data
3. Methodology
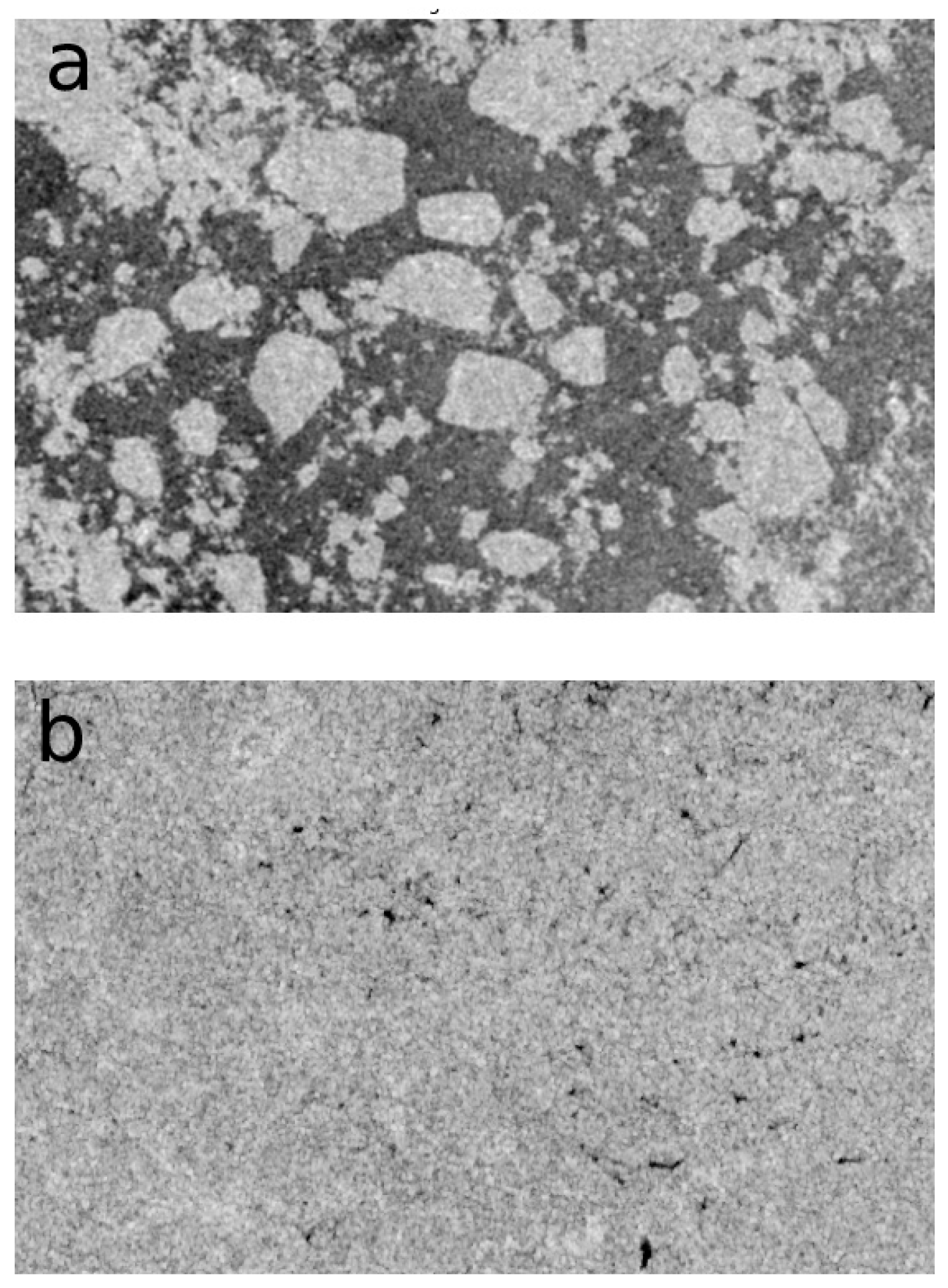
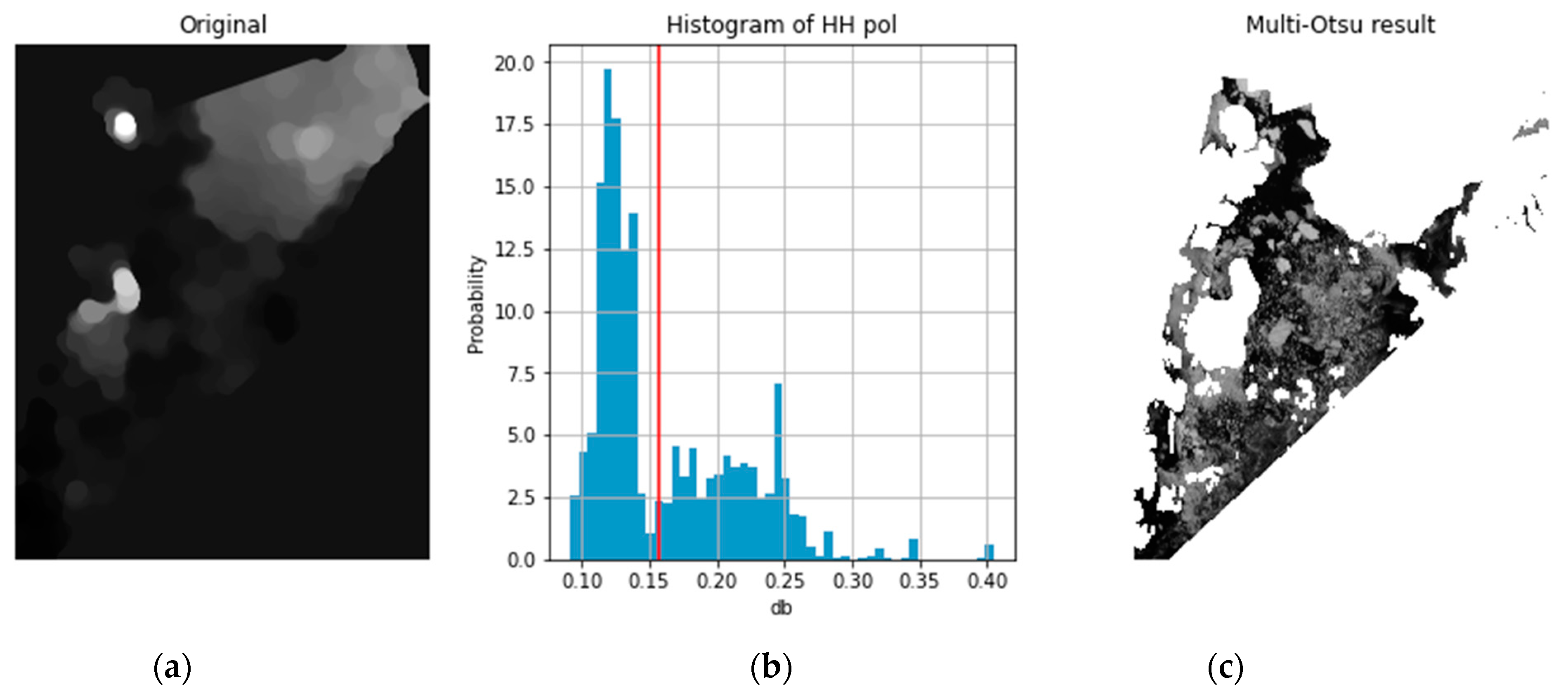
3.1. Image Segementation
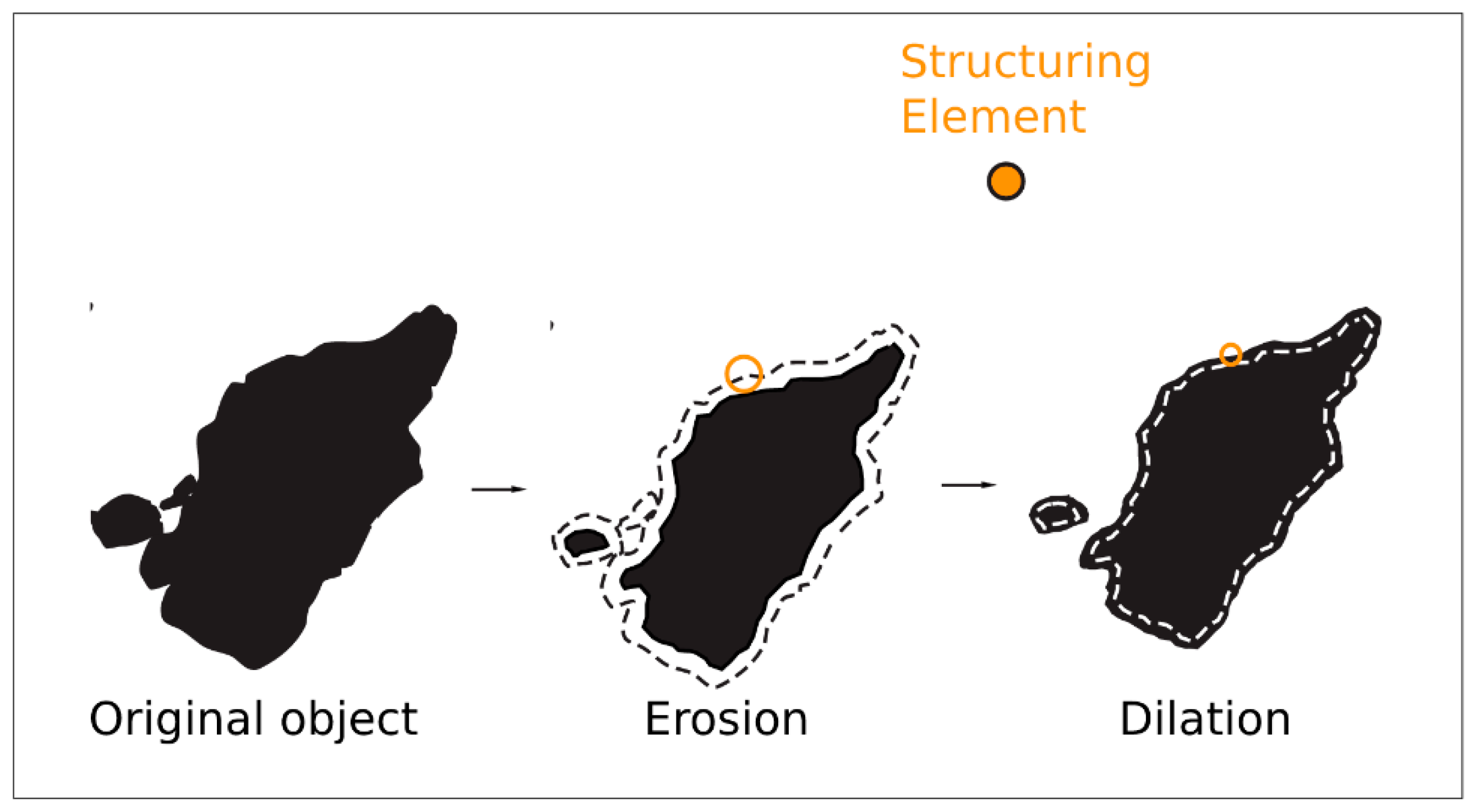
3.2. Ice Floe Extraction
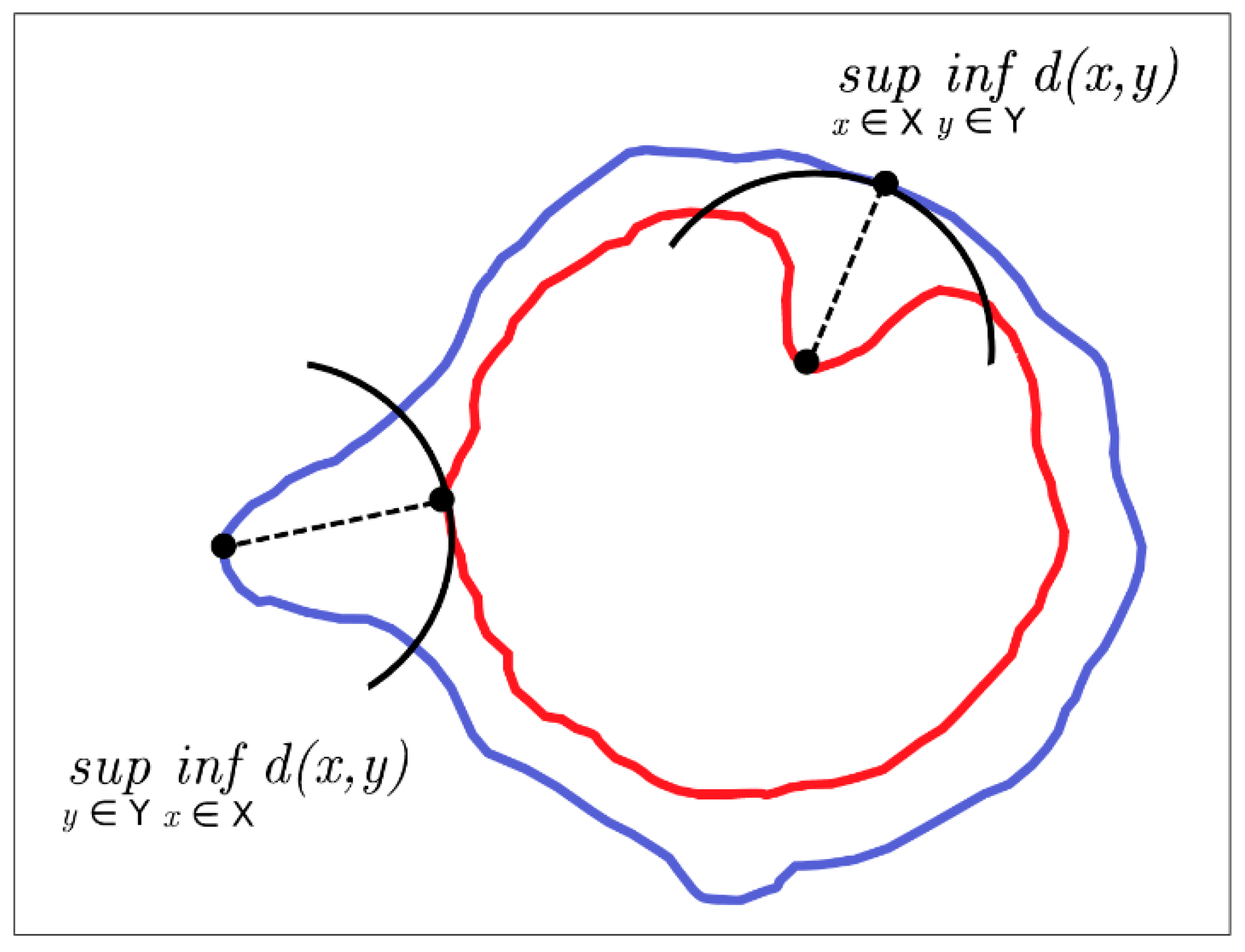
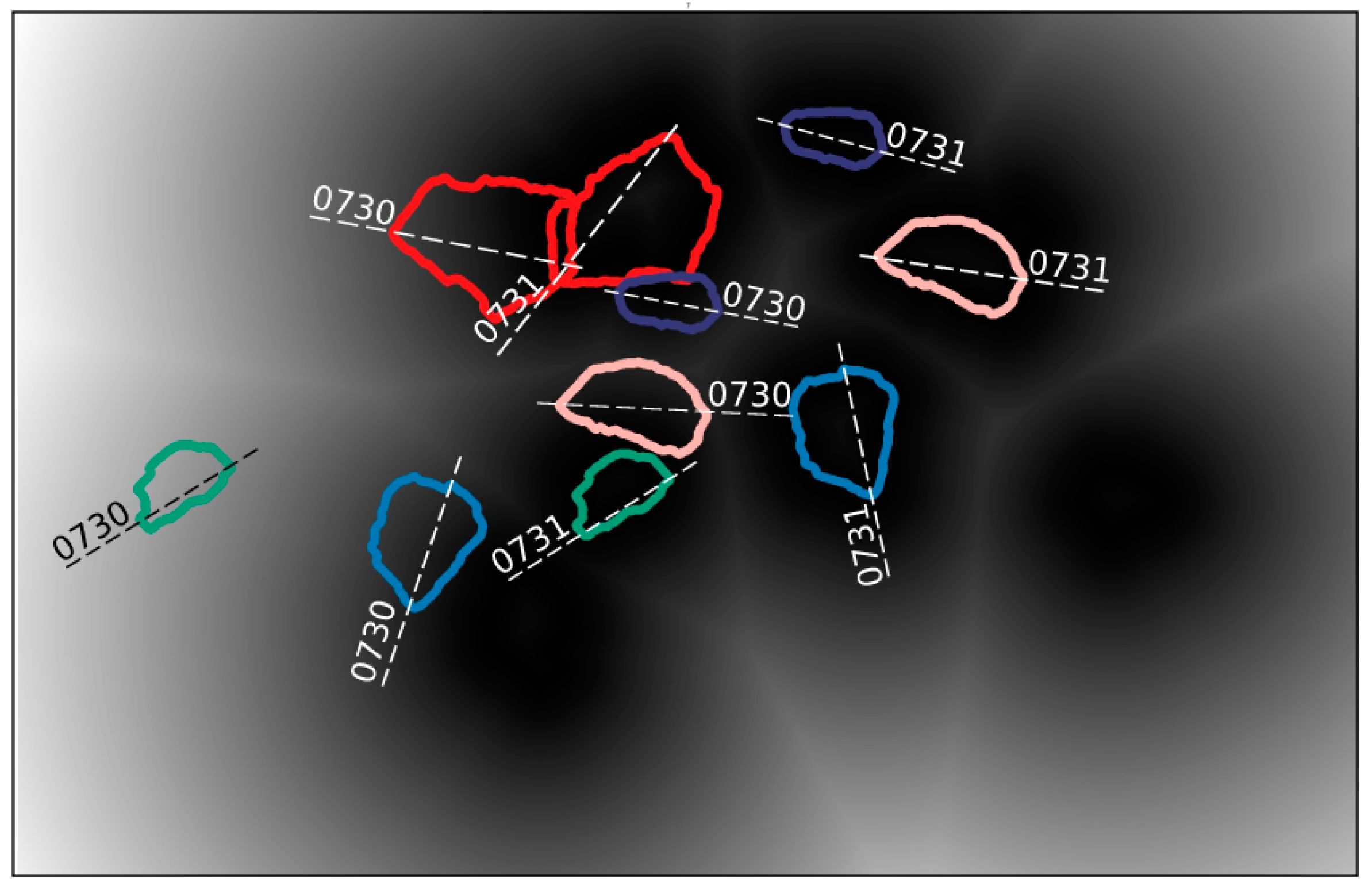
3.3. Ice Floe Matching
4. Experimental Results and Discussion
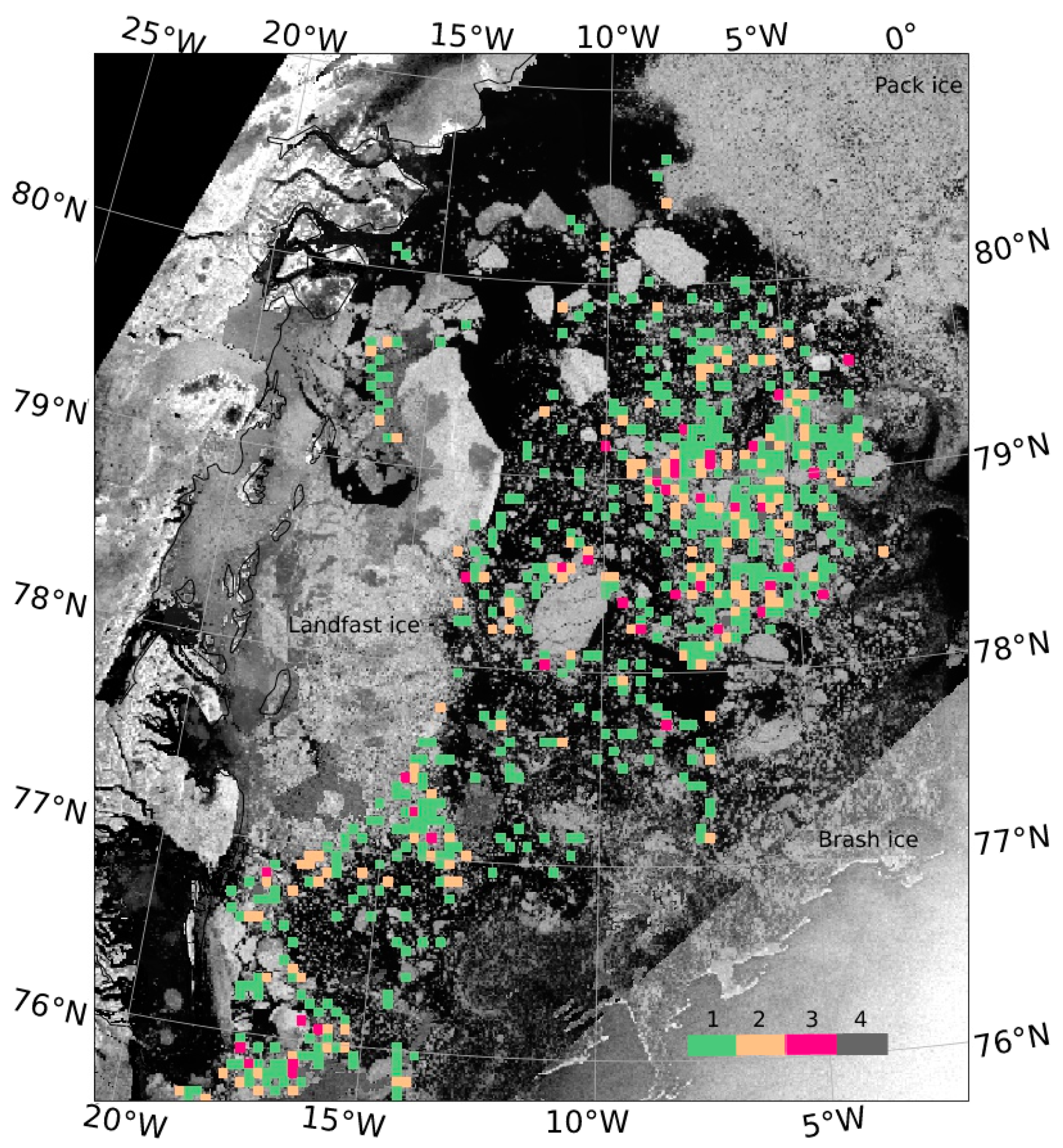
4.1. Ice Floes Drift of MIZ
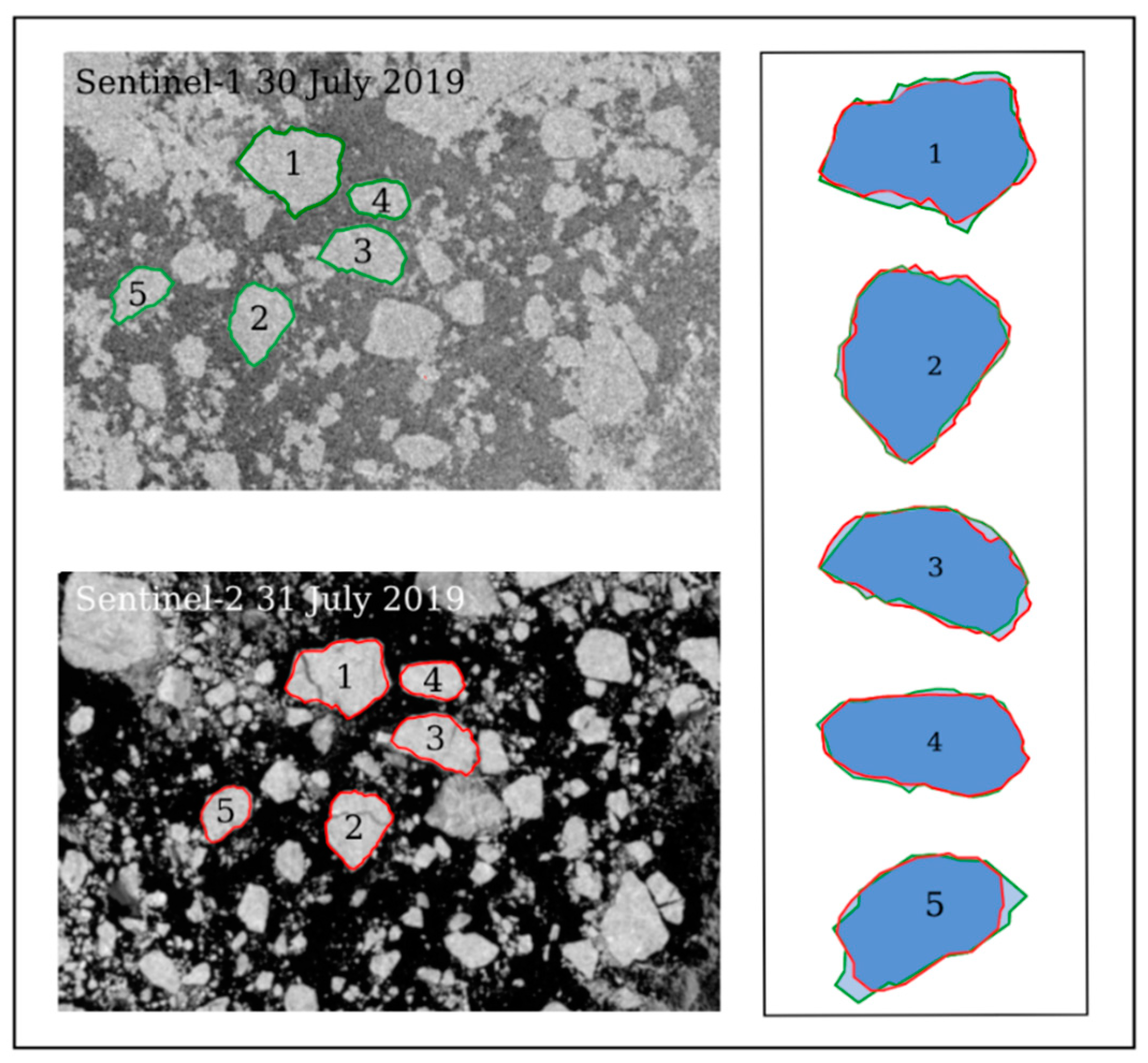
4.2. Ice Floes Imagery Registration
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kwok, R.; Spreen, G.; Pang, S. Arctic sea ice circulation and drift speed: Decadal trends and ocean currents. J. Geophys. Res. Ocean. 2013, 118, 2408–2425. [Google Scholar] [CrossRef]
- Vincent, R.F. A Study of the North Water Polynya Ice Arch using Four Decades of Satellite Data. Sci. Rep. 2019, 9, 20278. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stephenson, S.; Pincus, R. Challenge of sea-ice prediction for Arctic Marine Policy and Planning. J. Borderl. Stud. 2018, 33, 255–272. [Google Scholar] [CrossRef]
- Squire, V. Of ocean waves and sea-ice revisited. Cold Reg. Sci. Technol. 2007, 49, 110–133. [Google Scholar] [CrossRef]
- Rogers, T.S.; Walsh, J.E.; Rupp, T.S.; Brighan, L.W.; Sfraga, M. Future Arctic marine access: Analysis and evaluation of observations, models, and projections of sea ice. Cryosphere 2013, 7, 321–332. [Google Scholar] [CrossRef] [Green Version]
- Komarov, A.S.; Barber, D.G. Sea ice motion tracking from sequential dual-polarization radarsat-2 images. IEEE Trans. Geosci. Remote Sens. 2013, 52, 121–136. [Google Scholar] [CrossRef]
- Petrou, Z.I.; Tian, Y. High-resolution sea ice motion estimation with optical flow using satellite spectroradiometer data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1339–1350. [Google Scholar] [CrossRef]
- Ninnis, R.M.; Emery, W.J.; Collins, M.J. Automated extraction of pack ice motion from advanced very high resolution radiometer imagery. J. Geophys. Res. Ocean. 1986, 91, 10725–10734. [Google Scholar] [CrossRef]
- Fily, M.; Rothrock, D. Extracting sea ice data from satellite sar imagery. IEEE Trans. Geosci. Remote Sens. 1986, GE-24, 849–854. [Google Scholar] [CrossRef]
- Bracewell, R.N.; Chang, K.Y.; Jha, A.K.; Wang, Y.H. Affine theorem for two-dimensional Fourier transform. Electron. Lett. 1993, 29, 304. [Google Scholar] [CrossRef]
- Reddy, B.S.; Reddy, B.S. An FFT-based technique for translation, rotation, and scale-invariant image registration. IEEE Trans. Image Process. 1996, 5, 1266–1271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Gool, L.V. Speeded-up robust features (surf). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Muckenhuber, S.; Korosov, A.A.; Sandven, S. Open-source feature-tracking algorithm for sea ice drift retrieval from sentinel-1 sar imagery. Cryosphere 2016, 10, 913–925. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Acosta, R.; Schodlok, M.P.; Wilhelmus, M.M. Ice floe tracker: An algorithm to automatically retrieve lagrangian trajectories via feature matching from moderate-resolution visual imagery. Remote Sens. Environ. 2019, 234, 111406. [Google Scholar] [CrossRef]
- König, M.; Wagner, M.P.; Oppelt, N. Ice floe tracking with Sentinel-2. In Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions; International Society for Optics and Photonic: Bellingham, WA, USA, 2020; Volume 2020, p. 1152908. [Google Scholar]
- Fletcher, K. Sentinel-1: ESA’s Radar Observatory Mission for GMES Operational Services; ESA Communications: Noordwijk, The Netherlands, 2012. [Google Scholar]
- Sentinel-2 User Handbook. 1–64. Available online: https://earth.esa.int/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 28 May 2018).
- Resolution and Swath. Sentin. Online. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2/instrument-payload/resolution-and-swath (accessed on 28 May 2018).
- Revisit and Coverage. Sentin. Online. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-2-msi/revisit-coverage (accessed on 1 November 2018).
- Sentinel-2 Spectral Response Functions (S2-SRF). Sentin. Online. Available online: https://earth.esa.int/web/sentinel/userguides/sentinel-2-msi/document-library/-/asset_publisher/Wk0TKajiISaR/content/sentinel-2a-spectral-responses (accessed on 3 May 2018).
- Soille, P. Morphological Image Analysis Principles and Applications, 2nd ed.; Springer: Berlin, Germany, 2003; p. 391. [Google Scholar]
- Liao, P.; Chen, T.; Chung, P. A fast algorithm for multilevel thresholding. J. Inf. Sci. Eng. 2001, 17, 713–727. [Google Scholar]
- Roerdink, J.; Meijster, A. The watershed transform: Definitions, algorithms and parallelization strategies. Fundam. Inform. 2000, 41, 187–228. [Google Scholar] [CrossRef] [Green Version]
- Wahler, R.A.; Shih, F.Y. Image enhancement for radiographs utilizing filtering, gray scale transformation and Sobel gradient operator. Images of the Twenty-First Century. In Proceedings of the Annual International Engineering in Medicine and Biology Society, International Conference of the IEEE Engineering, Seattle, WA, USA, 9–12 November 1989. [Google Scholar]
- Huttenlocher, D.P.; Klanderman, G.A.; Rucklidge, W.J. Comparing images using the hausdorff distance. IEEE Trans. Pattern Anal. Mach. Intell. 1993, 15, 850–863. [Google Scholar] [CrossRef] [Green Version]
- Kozlov, I.E.; Plotnikov, E.V.; Manucharyan, G.E. Brief Communication: Mesoscale and submesoscale dynamics in the marginal ice zone from sequential synthetic aperture radar observations. Cryosphere 2020, 14, 2941–2947. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [s] | Accuracy | |||||
|---|---|---|---|---|---|---|
| 0.8 | 1/50 | 1/20 | 1/10 | 1388 | 1849 | 100% |
| 0.8 | 1/50 | 1/12 | 1/6 | 1155 | 1289 | 98% |
| 0.8 | 1/30 | 1/20 | 1/10 | 1787 | 1603 | 95% |
| 0.6 | 1/50 | 1/20 | 1/10 | 2147 | 1718 | 93% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; König, M.; Oppelt, N. Partial Shape Recognition for Sea Ice Motion Retrieval in the Marginal Ice Zone from Sentinel-1 and Sentinel-2. Remote Sens. 2021, 13, 4473. https://doi.org/10.3390/rs13214473
Wang M, König M, Oppelt N. Partial Shape Recognition for Sea Ice Motion Retrieval in the Marginal Ice Zone from Sentinel-1 and Sentinel-2. Remote Sensing. 2021; 13(21):4473. https://doi.org/10.3390/rs13214473
Chicago/Turabian StyleWang, Mingfeng, Marcel König, and Natascha Oppelt. 2021. "Partial Shape Recognition for Sea Ice Motion Retrieval in the Marginal Ice Zone from Sentinel-1 and Sentinel-2" Remote Sensing 13, no. 21: 4473. https://doi.org/10.3390/rs13214473