
A Robust Adaptive Unscented Kalman Filter for Floating Doppler Wind-LiDAR Motion Correction


Abstract
:1. Introduction
2. Materials and Methods
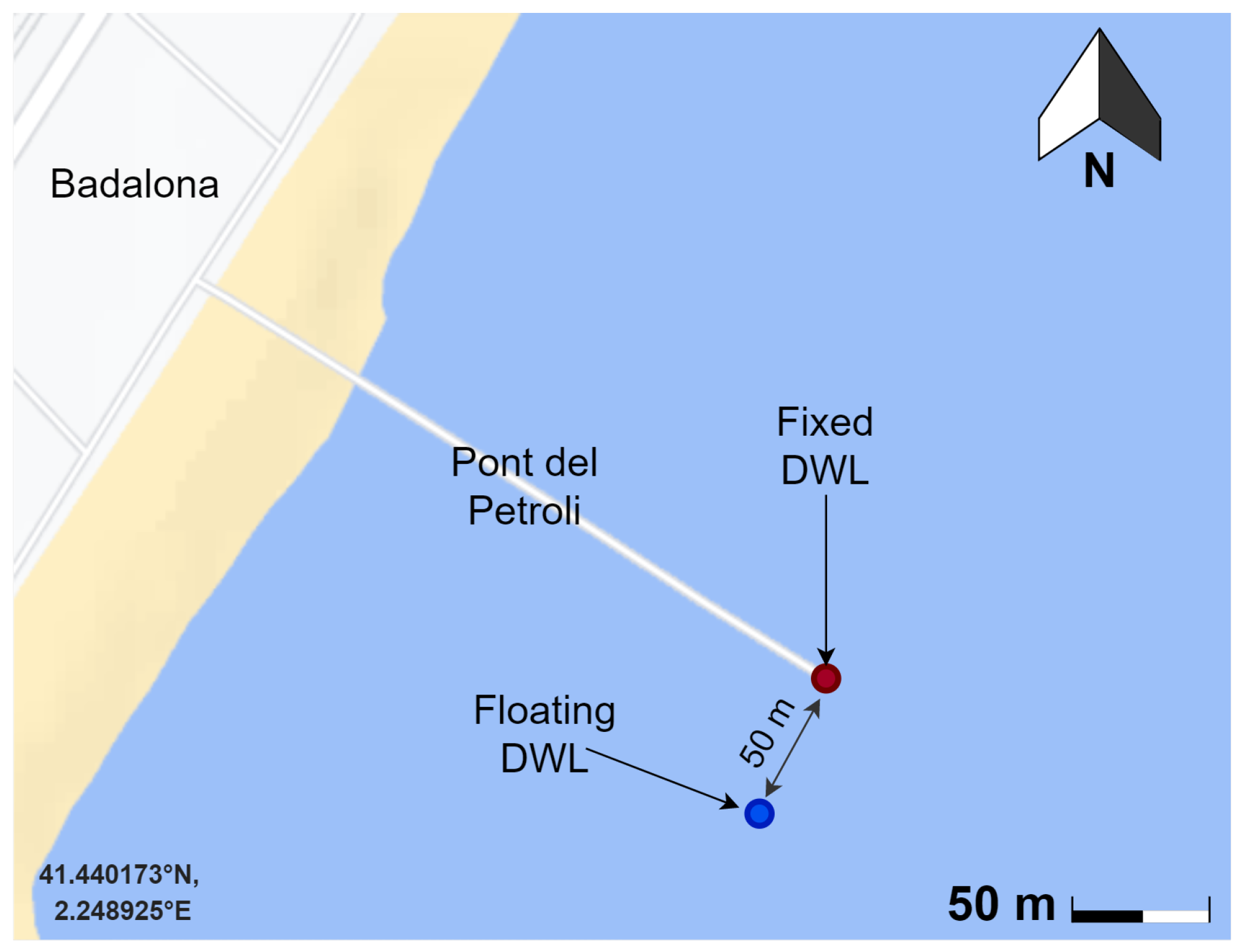
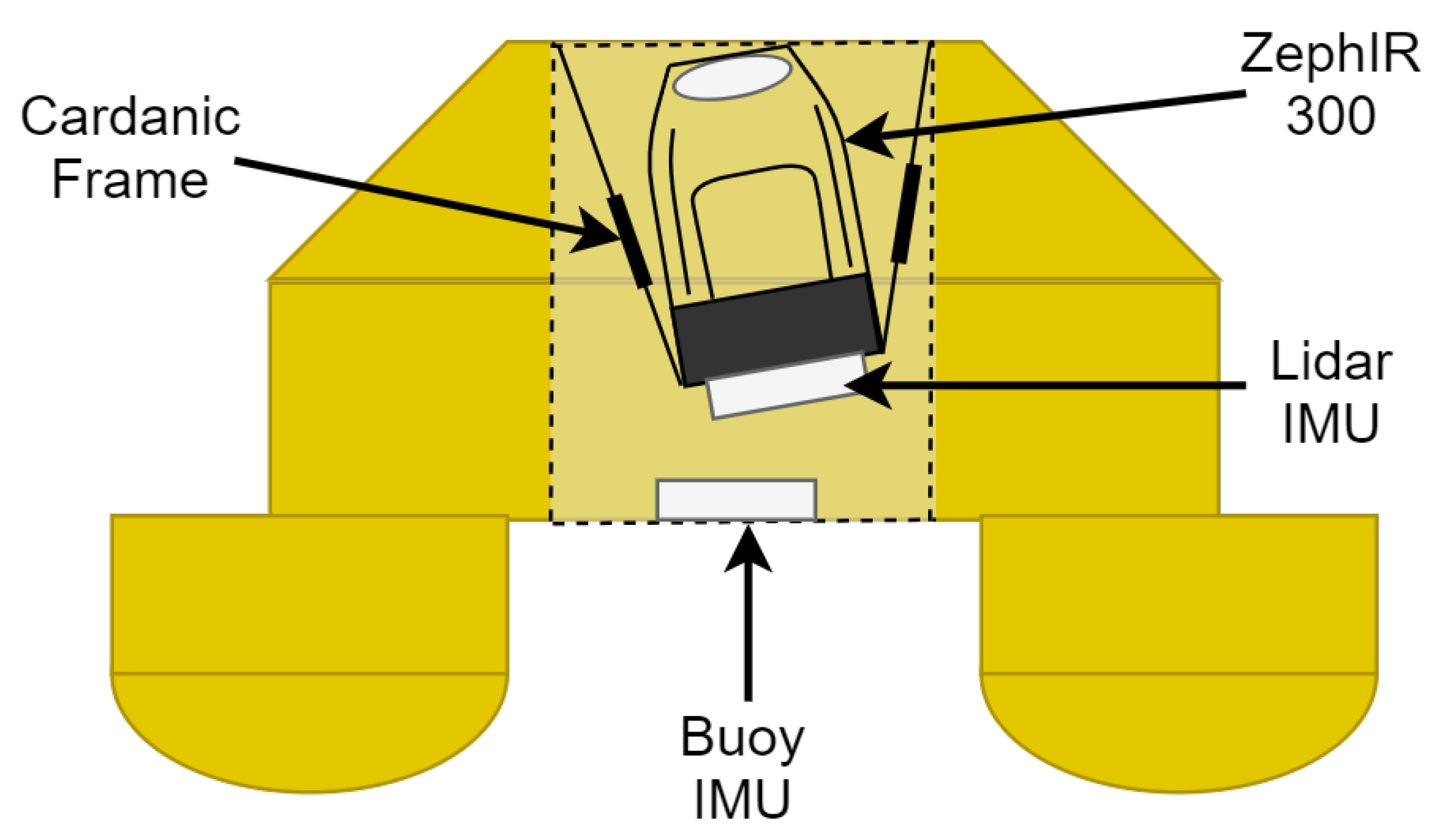
2.1. Instrumental Setup
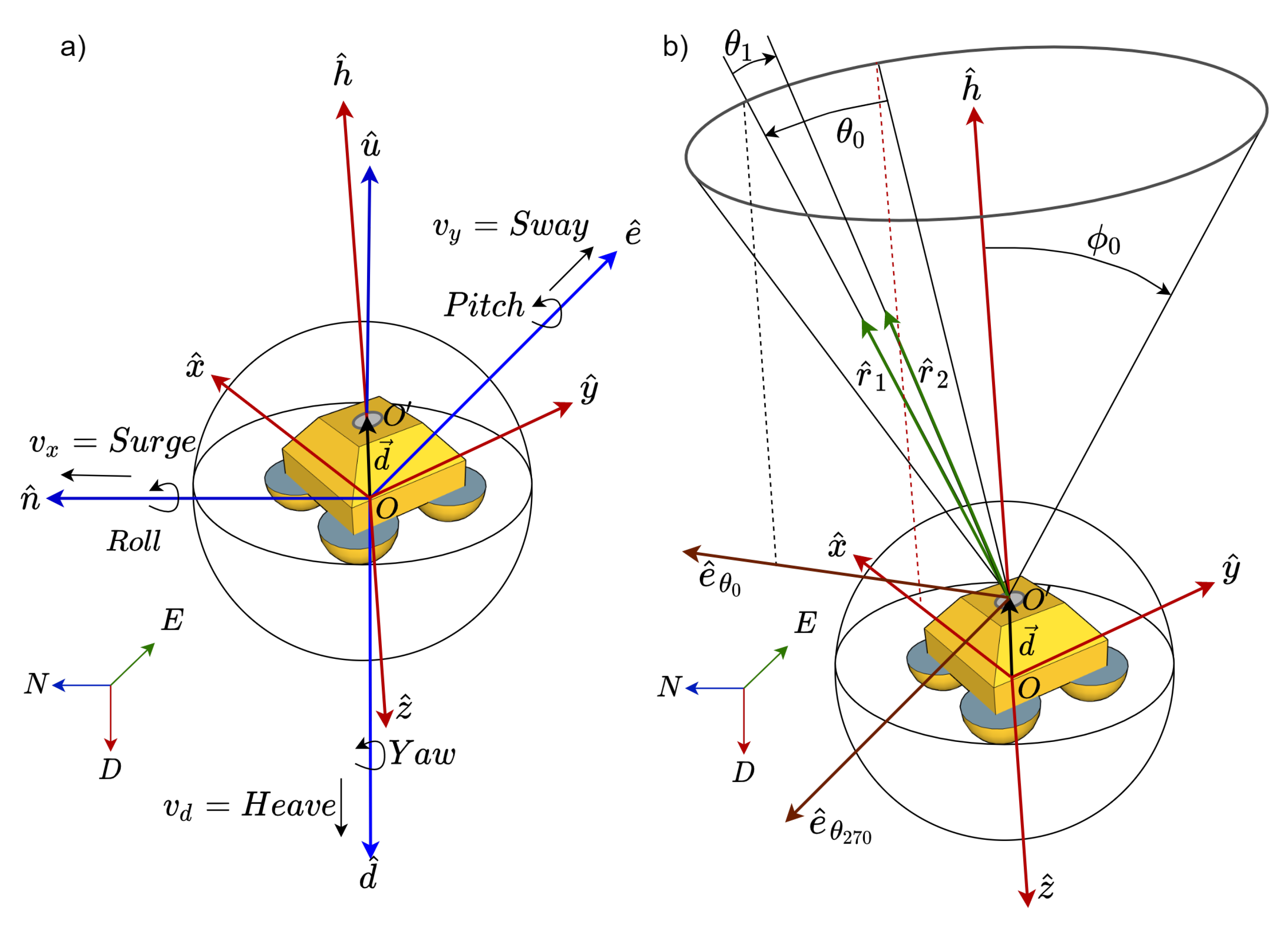
2.2. Basic Theoretical Definitions
2.3. The Estimation Viewpoint
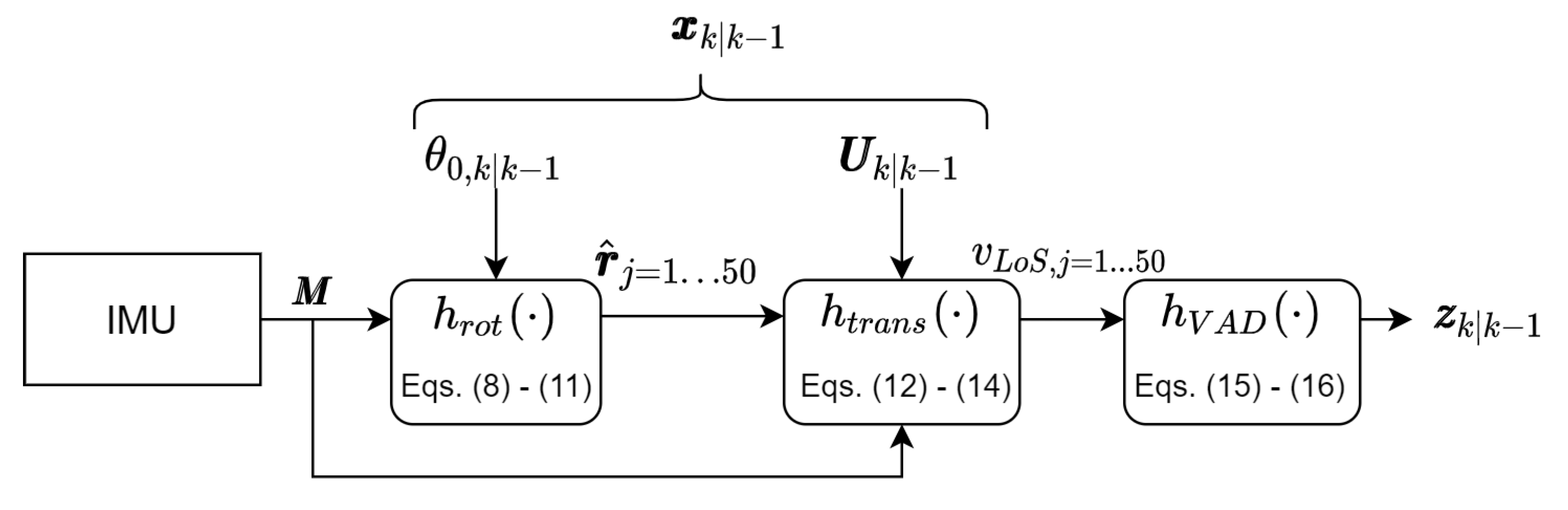
2.4. The Measurement Model: FDWL Motion
2.4.1. Rotational Motion
2.4.2. Translational Motion
2.4.3. VAD Algorithm
2.5. State-Transition Model
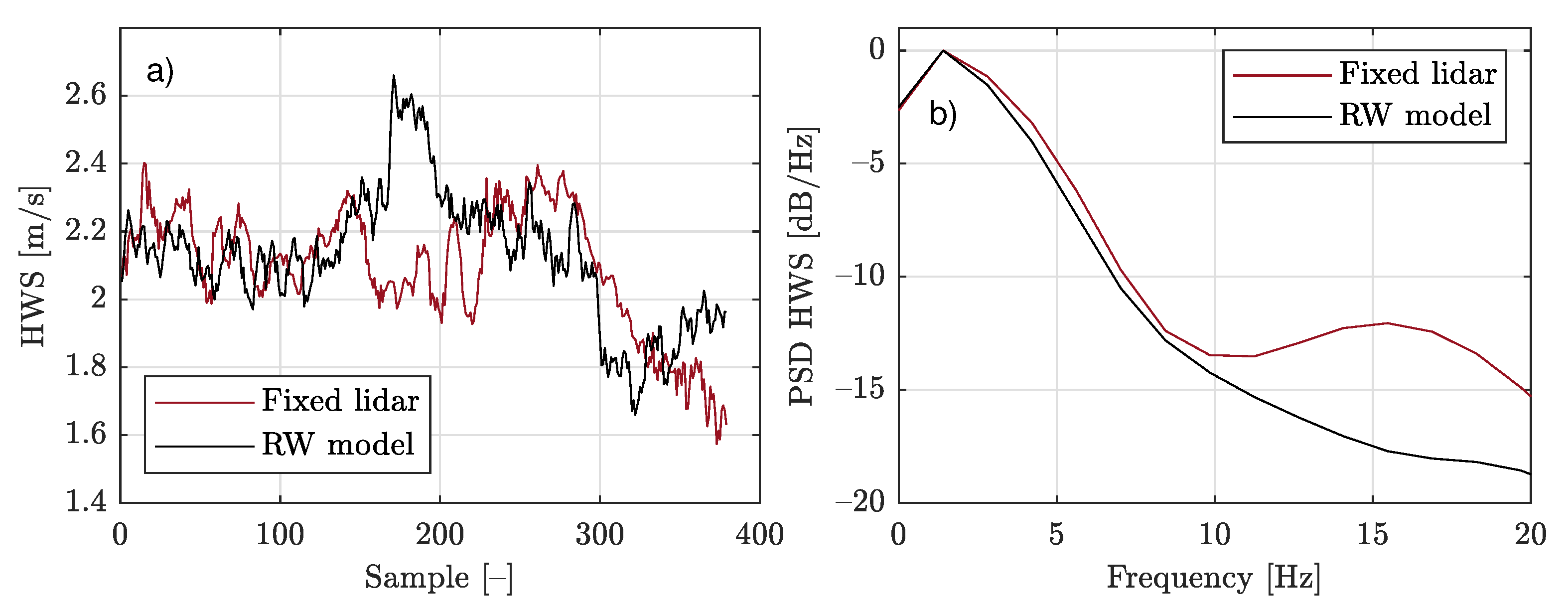
2.5.1. Wind Model
2.5.2. Initial Scan-Phase Model
2.6. State-Space Formulation of the Problem
- (i)
- retrieval of the motion-corrupted instantaneous LoS set, ;
- (ii)
- estimation of the associated LoS velocities, ; and
- (iii)
- VAD retrieval of the motion-corrupted observation wind vector, ;
2.7. Estimation of State- and Observation-Noise Covariance Matrices
2.8. Filter Initialization
3. Results
3.1. Data Set
3.2. Data Filtering
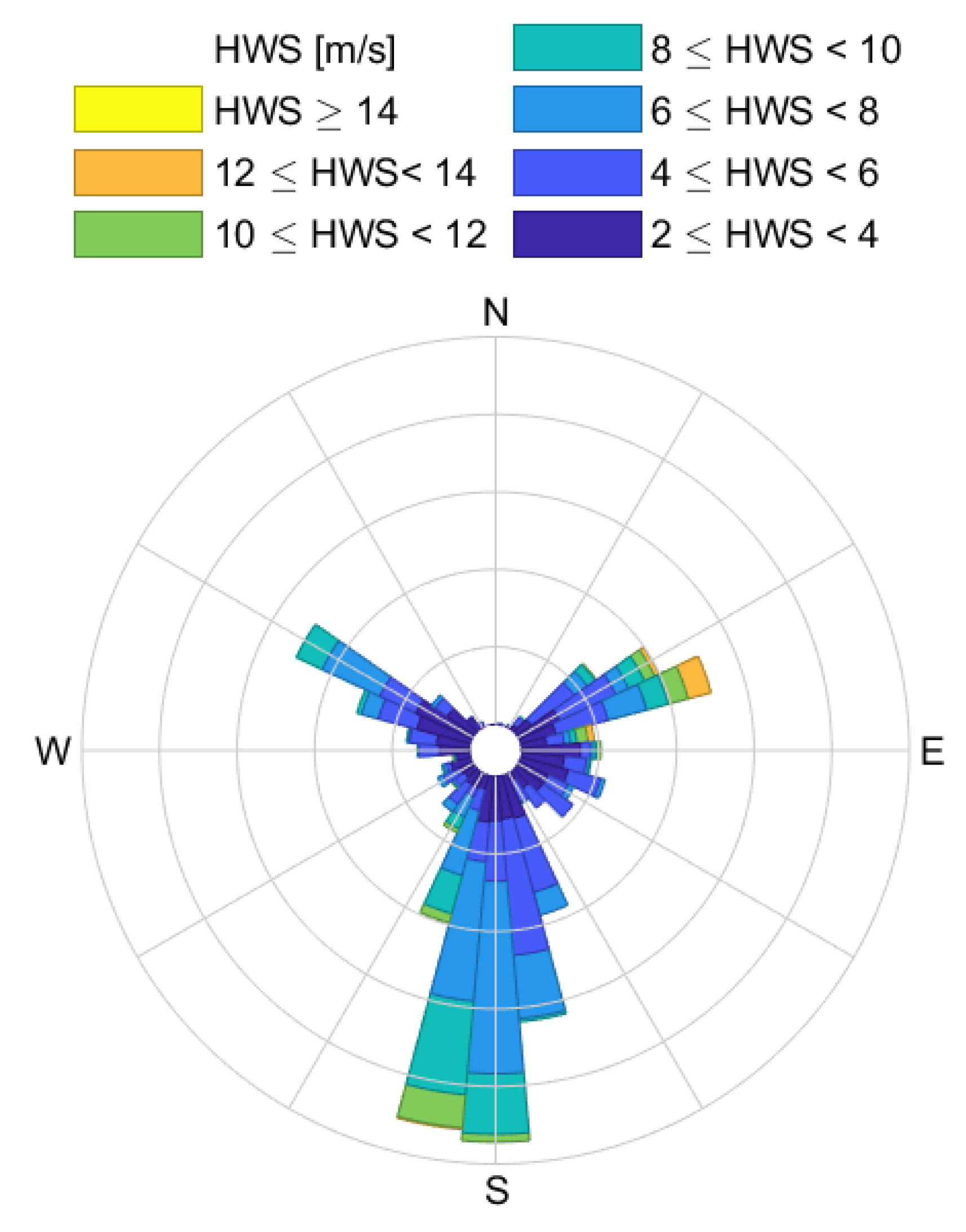
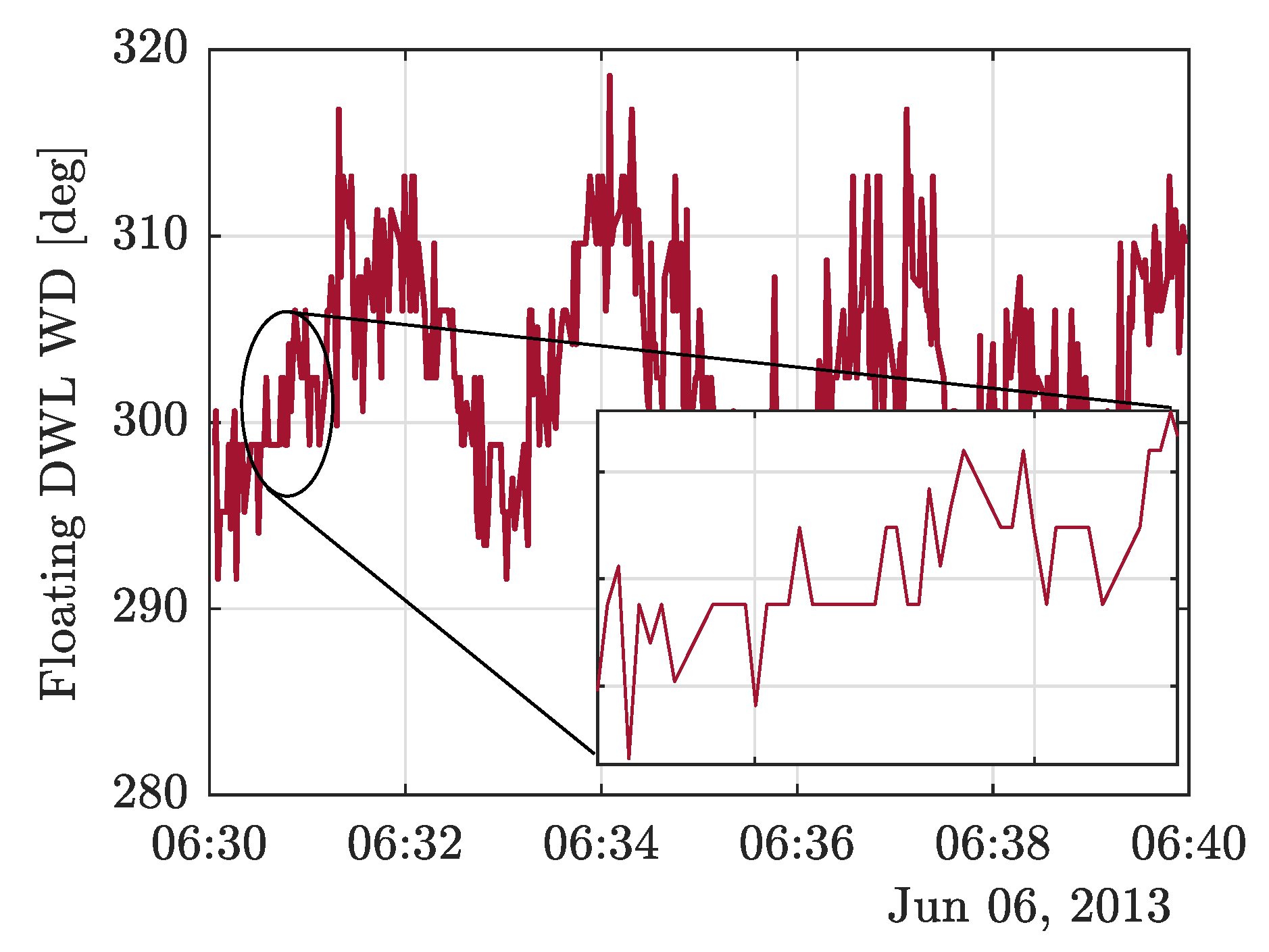
3.3. Campaign Overview
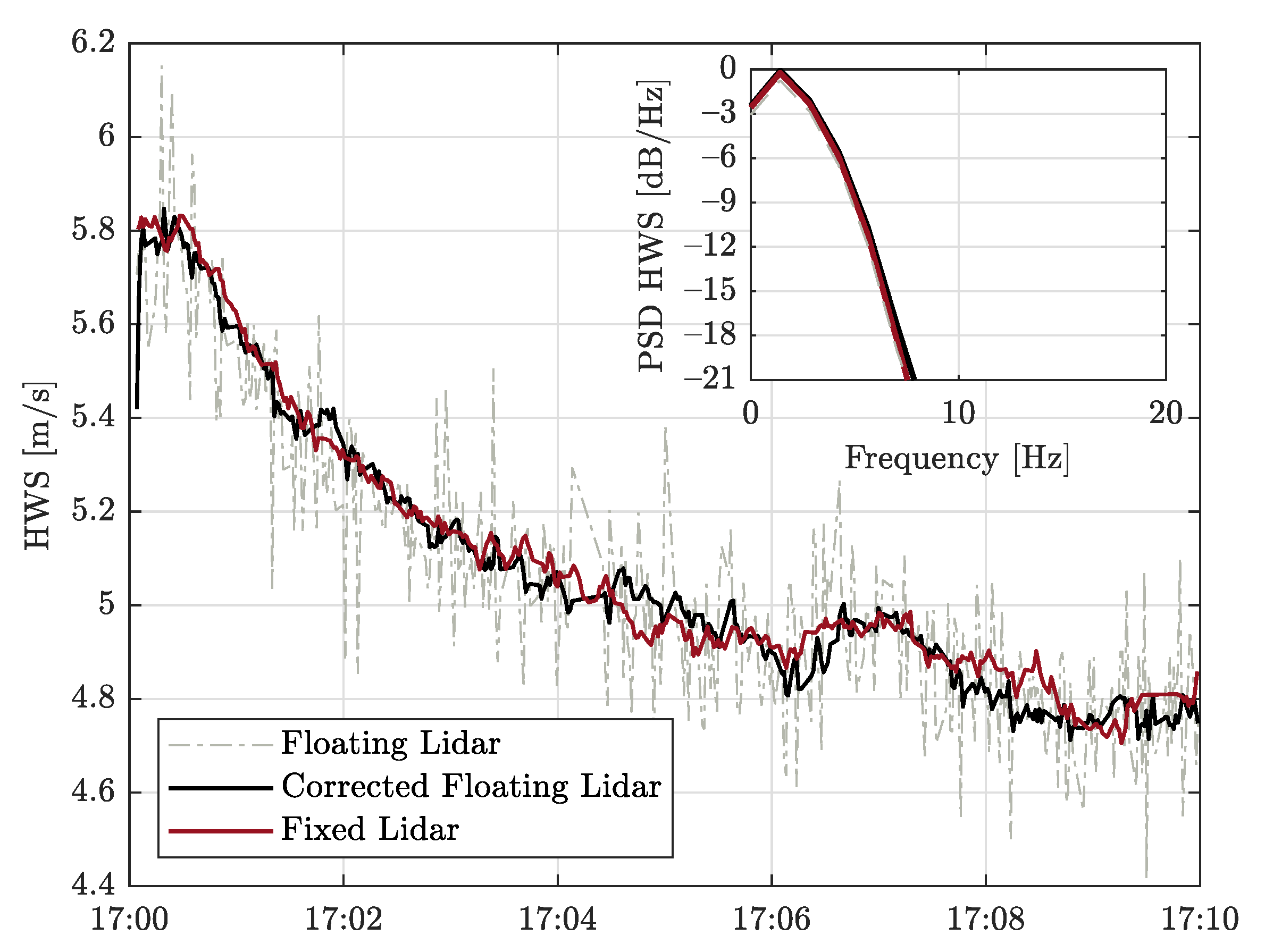
3.4. UKF Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Sample Availability
Abbreviations
| DoF | Degrees of Freedom |
| DWL | Doppler Wind LiDAR |
| EKF | Extended Kalman Filter |
| FDWL | Floating Doppler Wind LiDAR |
| HWS | Horizontal Wind Speed |
| IMU | Inertial Measurement Unit |
| KF | Kalman Filter |
| LoS | Line-of-Sight |
| LSQ | Least Squares |
| MD | Mean Deviation |
| metmast | meteorological mast |
| PdP | El Pont del Petroli |
| PSD | Power Spectral Density |
| RAUKF | Robust Adaptive Unscented Kalman Filter |
| RMSE | Root Mean Square Error |
| RW | Random Walk |
| SV | Spatial Variation |
| TI | Turbulence Intensity |
| UKF | Unscented Kalman Filter |
| VAD | Velocity–Azimuth Display |
| VWS | Vertical Wind Speed |
| WD | Wind Direction |
| WE | Wind Energy |
Appendix A. Kalman Filter Review
Appendix A.1. The Unscented Transform
Appendix A.2. The Unscented Kalman Filter
Appendix B. RAUKF Fault-Detection Mechanism
References
- Global Wind Energy Council. Global Wind Report 2018; Technical Report; Global Wind Energy Council: Brussels, Belgium, 2019. [Google Scholar]
- Barthelmie, R.; Courtney, M.; Højstrup, J.; Larsen, S. Meteorological aspects of offshore wind energy: Observations from the Vindeby wind farm. J. Wind Eng. Ind. Aerodyn. 1996, 62, 191–211. [Google Scholar] [CrossRef]
- Offshore Wind in Europe Key Trends and Statistics 2019; Technical Report; WindEurope: Brussels, Belgium, 2020.
- Timmons, D. 25 - Optimal Renewable Energy Systems: Minimizing the Cost of Intermittent Sources and Energy Storage. In A Comprehensive Guide to Solar Energy Systems; Letcher, T.M., Fthenakis, V.M., Eds.; Academic Press: Cambridge, MA, USA, 2018; pp. 485–504. [Google Scholar] [CrossRef]
- Carbon Trust. Carbon Trust Offshore Wind Accelerator Roadmap for the Commercial Acceptance of Floating LIDAR Technology; Technical Report; Carbon Trust: London, UK, 2013. [Google Scholar]
- Peña, A.; Hasager, C.; Lange, J.; Anger, J.; Badger, M.; Bingöl, F.; Bischoff, O.; Cariou, J.P.; Dunne, F.; Emeis, S.; et al. Remote Sensing for Wind Energy; DTU Wind Energy: Roskilde, Denmark, 2013. [Google Scholar]
- Sathe, A.; Mann, J. A review of turbulence measurements using ground-based wind lidars. Atmos. Meas. Tech. 2013, 6, 3147–3167. [Google Scholar] [CrossRef] [Green Version]
- Berger, R. Offshore Wind toward 2020: On the Pathway to Cost Competitiveness; Technical Report; Roland Berger: Munich, Germany, 2013. [Google Scholar]
- Gutiérrez, M.A.; Tiana-Alsina, J.; Bischoff, O.; Cateura, J.; Rocadenbosch, F. Performance evaluation of a floating Doppler wind lidar buoy in mediterranean near-shore conditions. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2147–2150. [Google Scholar] [CrossRef]
- Gutierrez-Antunano, M.A.; Tiana-Alsina, J.; Rocadenbosch, F.; Sospedra, J.; Aghabi, R.; Gonzalez-Marco, D. A wind-lidar buoy for offshore wind measurements: First commissioning test-phase results. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS-2017), Fort Worth, TX, USA, 23–28 July 2017; IEEE: Fort Worth, TX, USA, 2017; pp. 1607–1610. [Google Scholar] [CrossRef]
- Schuon, F.; González, D.; Rocadenbosch, F.; Bischoff, O.; Jané, R. KIC InnoEnergy Project Neptune: Development of a Floating LiDAR Buoy for Wind, Wave and Current Measurements. In Proceedings of the DEWEK 2012 German Wind Energy Conference, Bremen, Germany, 19–20 May 2012. [Google Scholar]
- Mathisen, J.P. Measurement of wind profile with a buoy mounted lidar. Energy Procedia 2013, 30, 12. [Google Scholar]
- Gutiérrez-Antuñano, M.; Tiana-Alsina, J.; Salcedo, A.; Rocadenbosch, F. Estimation of the Motion-Induced Horizontal-Wind-Speed Standard Deviation in an Offshore Doppler Lidar. Remote Sens. 2018, 10, 2037. [Google Scholar] [CrossRef] [Green Version]
- Salcedo-Bosch, A.; Gutierrez-Antunano, M.A.; Tiana-Alsina, J.; Rocadenbosch, F. Floating Doppler Wind Lidar Measurement of Wind Turbulence: A Cluster Analysis. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS-2020), Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar]
- Courtney, M.S.; Hasager, C.B. Chapter 4: Remote sensing technologies for measuring offshore wind. In Offshore Wind Farms; Elsevier: Amsterdam, The Netherlands, 2016; pp. 59–82. [Google Scholar]
- Mücke, T.; Kleinhans, D.; Peinke, J. Atmospheric turbulence and its influence on the alternating loads on wind turbines. Wind Energy 2011, 14, 301–316. [Google Scholar] [CrossRef]
- Gottschall, J.; Gribben, B.; Stein, D.; Würth, I. Floating lidar as an advanced offshore wind speed measurement technique: Current technology status and gap analysis in regard to full maturity. Wiley Interdiscip. Rev. Energy Environ. 2017, 6, e250. [Google Scholar] [CrossRef]
- Gottschall, J.; Wolken-Möhlmann, G.; Lange, B. About offshore resource assessment with floating lidars with special respect to turbulence and extreme events. J. Phys. Conf. Ser. 2014, 555, 12–43. [Google Scholar] [CrossRef]
- Tiana-Alsina, J.; Rocadenbosch, F.; Gutierrez-Antunano, M.A. Vertical Azimuth Display simulator for wind-Doppler lidar error assessment. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1614–1617. [Google Scholar] [CrossRef] [Green Version]
- Kelberlau, F.; Neshaug, V.; Lønseth, L.; Bracchi, T.; Mann, J. Taking the Motion out of Floating Lidar: Turbulence Intensity Estimates with a Continuous-Wave Wind Lidar. Remote Sens. 2020, 12, 898. [Google Scholar] [CrossRef] [Green Version]
- Gutiérrez-Antuñano, M.A.; Tiana-Alsina, J.; Rocadenbosch, F. Performance evaluation of a floating lidar buoy in nearshore conditions. Wind Energy 2017, 20, 1711–1726. [Google Scholar] [CrossRef] [Green Version]
- Mann, J. Wind field simulation. Probabilistic Eng. Mech. 1998, 13, 269–282. [Google Scholar] [CrossRef]
- Brown, B.G.; Katz, R.W.; Murphy, A.H. Time series models to simulate and forecast wind speed and wind power. J. Appl. Meteorol. Climatol. 1984, 23, 1184–1195. [Google Scholar] [CrossRef]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding: Theory and Practice; Series on Atmospheric, Oceanic and Planetary Physics; World Scientific: Singapore, 2004; Volume 2. [Google Scholar]
- Robert Grover, R.; Hwang, P.Y.C. Introduction to Random Signals and Kalman Filtering: With MATLAB Exercises, 4th ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Slinger, C.; Harris, M. Introduction to Continuous-Wave Doppler Lidar. Available online: http://breeze.colorado.edu/ftp/RSWE/Chris_Slinger.pdf (accessed on 21 July 2021).
- Sospedra, J.; Cateura, J.; Puigdefàbregas, J. Novel multipurpose buoy for offshore wind profile measurements EOLOS platform faces validation at ijmuiden offshore metmast. Sea Technol. 2015, 56, 25–28. [Google Scholar]
- ZX Lidars. ZX 300M—Offshore Wind Measurements from Vertical Profiling Lidar; ZX Lidars: Ledbury, UK, 2021. [Google Scholar]
- Pitter, M.; Burin des Roziers, E.; Medley, J.; Mangat, M.; Slinger, C.; Harris, M. Performance Stability of Zephir in High Motion Enviroments: Floating and Turbine Mounted; Technical Report; ZephIR: Ledbury, UK, 2014. [Google Scholar]
- Smith, D.A.; Mehta, K.C. Investigation of stationary and nonstationary wind data using classical Box-Jenkins models. J. Wind Eng. Ind. Aerodyn. 1993, 49, 319–328. [Google Scholar] [CrossRef]
- Davari, N.; Gholami, A. An Asynchronous Adaptive Direct Kalman Filter Algorithm to Improve Underwater Navigation System Performance. IEEE Sens. J. 2017, 17, 1061–1068. [Google Scholar] [CrossRef]
- Koivisto, M.; Seppänen, J.; Mellin, I.; Ekström, J.; Millar, J.; Mammarella, I.; Komppula, M.; Lehtonen, M. Wind speed modeling using a vector autoregressive process with a time-dependent intercept term. Int. J. Electr. Power Energy Syst. 2016, 77, 91–99. [Google Scholar] [CrossRef]
- Li, W.; Sun, S.; Jia, Y.; Du, J. Robust unscented Kalman filter with adaptation of process and measurement noise covariances. Digit. Signal Process. 2016, 48, 93–103. [Google Scholar] [CrossRef]
- Zheng, B.; Fu, P.; Li, B.; Yuan, X. A Robust Adaptive Unscented Kalman Filter for Nonlinear Estimation with Uncertain Noise Covariance. Sensors 2018, 18, 808. [Google Scholar] [CrossRef] [Green Version]
- Wang, J. Stochastic Modeling for Real-Time Kinematic GPS/GLONASS Positioning. Navigation 1999, 46, 297–305. [Google Scholar] [CrossRef]
- Hajiyev, C.; Soken, H.E. Robust adaptive unscented Kalman filter for attitude estimation of pico satellites. Int. J. Adapt. Control Signal Process. 2014, 28, 107–120. [Google Scholar] [CrossRef]
- Lange, D.; Rocadenbosch, F.; Tiana-Alsina, J.; Frasier, S. Atmospheric Boundary Layer Height Estimation Using a Kalman Filter and a Frequency-Modulated Continuous-Wave Radar. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3338–3349. [Google Scholar] [CrossRef] [Green Version]
- Salcedo-Bosch, A.; Rocadenbosch, F.; Gutiérrez-Antuñano, M.A.; Tiana-Alsina, J. Estimation of Wave Period from Pitch and Roll of a Lidar Buoy. Sensors 2021, 21, 1310. [Google Scholar] [CrossRef]
- Salcedo-Bosch, A.; Gutierrez-Antunano, M.A.; Tiana-Alsina, J.; Rocadenbosch, F. Motional Behavior Estimation Using Simple Spectral Estimation: Application to the Off-Shore Wind Lidar. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS-2020), Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar]
- National Data Buoy Center. Nondirectional and Directional Wave Data Analysis Procedures; Technical Report; National Oceanic and Atmospheric Administration: Washington, DC, USA, 1996.
- Wagner, R.; Mikkelsen, T.; Courtney, M. Investigation of Turbulence Measurements with a Continuous Wave, Conically Scanning LiDAR; Technical Report; DTU: Roskilde, Denmark, 2009. [Google Scholar]
- Gutiérrez Antuñano, M.Á. Doppler Wind LIDAR Systems Data Processing and Applications: An Overview towards Developing the New Generation of Wind Remote-Sensing Sensors for Off-Shore Wind Farms. Ph.D. Thesis, Polytechnic University of Catalonia, Barcelona, Spain, 2019. [Google Scholar]
- Campbell Scientific. ZephIR 300; Technical Report; Campbell Scientific: Edmonton, AB, Canada, 2016. [Google Scholar]
- Bingöl, F.; Mann, J.; Foussekis, D. Conically scanning lidar error in complex terrain. Meteorol. Z. 2009, 18, 189–195. [Google Scholar] [CrossRef]
- Al-Khalidy, N. Building Generated Wind Shear and Turbulence Prediction Utilising Computational Fluid Dynamics. WSEAS Trans. Fluid Mech. 2018, 13, 126–135. [Google Scholar]
- Gottschall, J.; Wolken-Möhlmann, G.; Viergutz, T.; Lange, B. Results and conclusions of a floating-lidar offshore test. Energy Procedia 2014, 53, 156–161. [Google Scholar] [CrossRef]
- Taylor, G.I. The spectrum of turbulence. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1938, 164, 476–490. [Google Scholar] [CrossRef] [Green Version]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Signal Processing, Sensor Fusion, and Target Recognition VI; Kadar, I., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1997; Volume 3068, pp. 182–193. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Uncorrected | Motion-Corrected | WD Filtered Motion-Corrected | |
|---|---|---|---|
| 0.85 | 0.90 | 0.93 | |
| RMSE | 2.01% | 1.01% | 0.86% |
| MD | −1.70% | 0.29% | 0.36% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salcedo-Bosch, A.; Rocadenbosch, F.; Sospedra, J. A Robust Adaptive Unscented Kalman Filter for Floating Doppler Wind-LiDAR Motion Correction. Remote Sens. 2021, 13, 4167. https://doi.org/10.3390/rs13204167
Salcedo-Bosch A, Rocadenbosch F, Sospedra J. A Robust Adaptive Unscented Kalman Filter for Floating Doppler Wind-LiDAR Motion Correction. Remote Sensing. 2021; 13(20):4167. https://doi.org/10.3390/rs13204167
Chicago/Turabian StyleSalcedo-Bosch, Andreu, Francesc Rocadenbosch, and Joaquim Sospedra. 2021. "A Robust Adaptive Unscented Kalman Filter for Floating Doppler Wind-LiDAR Motion Correction" Remote Sensing 13, no. 20: 4167. https://doi.org/10.3390/rs13204167