
Prediction of Target Detection Probability Based on Air-to-Air Long-Range Scenarios in Anomalous Atmospheric Environments


Abstract
:
1. Introduction
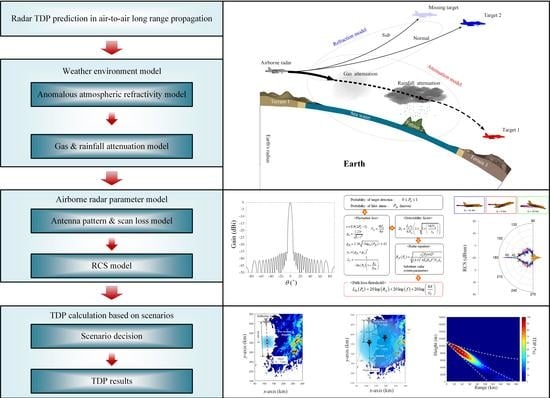
2. TDP Simulation Process
2.1. Anomalous Atmospheric Refractivity and Measurement
2.2. Weather Environment Models
2.3. TDP Calculation with Airborne Radar Parameters
3. TDP Calculation with Airborne Radar Parameters
- (1)
- TDPs when azimuth beam scanning within 90° in an anomalous atmospheric environment of the refractivity, as shown in Figure 7a.
- (2)
- TDPs when azimuth beam scanning within 90° in a rainy weather environment, as shown in Figure 7b.
- (3)
- TDPs according to the distance (Rt < 190 km) to the target in a heavy rain environment, as shown in Figure 7c.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rim, J.-W.; Koh, I.-S. SAR image generation of ocean surface using time-divided velocity bunching model. J. Electromagn. Eng. Sci. 2019, 19, 82–88. [Google Scholar] [CrossRef]
- Farina, A.; Saverione, A.; Timmoneri, L. MVDR vectorial lattice applied to space–time processing for AEW radar with large instantaneous bandwidth. IEE Proc.-Radar Sonar Navig. 1996, 143, 41–46. [Google Scholar] [CrossRef]
- Kim, E.H.; Park, J. Dwell time optimization of alert-confirm detection for active phased array radars. J. Electromagn. Eng. Sci. 2019, 19, 107–114. [Google Scholar] [CrossRef]
- Nam, J.-H.; Rim, J.-W.; Lee, H.; Koh, I.-S.; Song, J.-H. Modeling of monopulse radar signals reflected from ground clutter in a time domain considering doppler effects. J. Electromagn. Eng. Sci. 2020, 20, 190–198. [Google Scholar] [CrossRef]
- Benzon, H.; Høeg, P. Wave propagation simulation of radio occultations based on ECMWF refractivity profiles. Radio Sci. 2015, 50, 778–788. [Google Scholar] [CrossRef]
- Barclay, M.; Pietzschmann, U.; Gonzalez, G.; Tellini, P. AESA upgrade option for Eurofighter captor radar. IEEE Aerosp. Electron. Syst. Mag. 2010, 25, 11447006. [Google Scholar] [CrossRef]
- Mesnard, F.; Sauvageot, H. Climatology of anomalous propagation radar echoes in a coastal area. J. Appl. Meteorol. Climatol. 2010, 49, 2285–2300. [Google Scholar] [CrossRef]
- Lenouo, A. Climatology of anomalous propagation radar over Douala, Cameroon. Meteorol. Appl. 2014, 21, 249–255. [Google Scholar] [CrossRef]
- Colussi, L.C.; Schiphorst, R.; Teinsma, H.W.M.; Witvliet, B.A.; Fleurke, S.R.; Bentum, M.J.; van Maanen, E.; Griffioen, J. Multiyear trans-horizon radio propagation measurements at 3.5 ghz. IEEE Trans. Antennas Propag. 2018, 66, 884–896. [Google Scholar] [CrossRef]
- López, R.N.; del Río, V.S. High temporal resolution refractivity retrieval from radar phase measurements. Remote Sens. 2018, 10, 896. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Wei, M.; Yang, T.; Liu, P. Effects of atmospheric refraction on an airborne weather radar detection and correction method. Adv. Meteorol. 2015, 2015, 407867. [Google Scholar] [CrossRef]
- Gerstoft, P.; Rogers, L.T.; Krolik, J.L.; Hodgkiss, W.S. Inversion for refractivity parameters from radar sea clutter. Radio Sci. 2003, 38, 8053. [Google Scholar] [CrossRef]
- Lowry, A.R.; Rocken, C.; Sokolovskiy, S.V.; Anderson, K.D. Vertical profiling of atmospheric refractivity from ground-based GPS. Radio Sci. 2002, 37, 1–19. [Google Scholar] [CrossRef]
- Liu, X.; Wu, Z.; Wang, H. Inversion method of regional range-dependent surface ducts with a base layer by doppler weather radar echoes based on WRF model. Atmosphere 2020, 11, 754. [Google Scholar] [CrossRef]
- Wagner, M.; Gerstoft, P.; Rogers, T. Estimating refractivity from propagation loss in turbulent media. Radio Sci. 2016, 51, 1876–1894. [Google Scholar] [CrossRef] [Green Version]
- Gunashekar, S.D.; Warrington, E.M.; Siddle, D.R.; Valtr, P. Signal strength variations at 2 GHz for three sea paths in the British Channel Islands: Detailed discussion and propagation modeling. Radio Sci. 2007, 42, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Alappattu, D.P.; Billingsley, S.; Blomquist, B.; Burkholder, R.J.; Christman, A.J.; Creegan, E.D.; Paolo, T.; de Eleuterio, D.P.; Fernando, H.J.S.; et al. CASPER: Coupled air–sea processes and electromagnetic ducting research. Bull. Am. Meteorol. Soc. 2018, 99, 1449–1471. [Google Scholar] [CrossRef]
- Habib, A.; Moh, S. Wireless channel models for over-the-sea communication: A comparative study. Appl. Sci. 2019, 9, 443. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Kun-De, Y.; Yang, Y.-X.; Ma, Y.-L. Influence of obstacle on electromagnetic wave propagation in evaporation duct with experiment verification. Chin. Phys. B 2015, 24, 054101. [Google Scholar] [CrossRef]
- Wang, S.; Lim, T.H.; Chong, Y.J.; Ko, J.; Park, Y.B.; Choo, H. Estimation of abnormal wave propagation by a novel duct map based on the average normalized path loss. Microw. Opt. Technol. Lett. 2020, 62, 1662–1670. [Google Scholar] [CrossRef]
- Barrios, A.E. Considerations in the development of the advanced propagation model (APM) for U.S. Navy applications. In Proceedings of the 2003 International Conference on Radar, Adelaide, SA, Australia, 3–5 September 2003; pp. 77–82. [Google Scholar]
- Sirkova, I. Brief review on PE method application to propagation channel modeling in sea environment. Open Eng. 2012, 2, 19–38. [Google Scholar] [CrossRef]
- Levy, M. Parabolic Equation Methods for Electromagnetic Wave Propagation; The Institution of Engineering and Technology: London, UK, 2000. [Google Scholar]
- Hardin, R.H.; Tappert, F.D. Application of the split-step Fourier method to the numerical solution of nonlinear and variable coefficient wave equations. SIAM Rev. 1973, 15, 423. [Google Scholar]
- Ozgun, O. New Software Tool (GO+UTD) for visualization of wave propagation [testing ourselves]. IEEE Antennas Propag. Mag. 2016, 58, 91–103. [Google Scholar] [CrossRef]
- Patterson, W.L. User Manual for Advanced Refractive Effects Prediction System (AREPS); Space Naval Warfare System Center: San Diego, CA, USA, 2004. [Google Scholar]
- Schwartz, B.; Benjamin, S.G. A comparison of temperature and wind measurements from ACARS-equipped aircraft and Rawinsondes. Weather Forecast. 1995, 10, 528–544. [Google Scholar] [CrossRef]
- Lee, T.R.; Pal, S. On the potential of 25 years (1991–2015) of rawinsonde measurements for elucidating climatological and spatiotemporal patterns of afternoon boundary layer depths over the contiguous US. Adv. Meteorol. 2017, 2017, 6841239. [Google Scholar] [CrossRef] [Green Version]
- Hock, T.F.; Franklin, J.L. The NCAR GPS dropwindsonde. Bull. Amer. Meteorol. Soc. 1999, 80, 407–420. [Google Scholar] [CrossRef] [Green Version]
- ITU. The Radio Refractive Index: Its Formula and Refractivity Data. Available online: https://www.itu.int/rec/R-REC-P.453/en (accessed on 24 August 2021).
- Korea Meteorological Administration. Available online: https://www.kma.go.kr/eng/index.jsp (accessed on 24 August 2021).
- Lim, T.H.; Go, M.; Seo, C.; Choo, H. Analysis of the target detection performance of air-to-air airborne radar using long-range propagation simulation in abnormal atmospheric conditions. Appl. Sci. 2020, 10, 6440. [Google Scholar] [CrossRef]
- National Geographic Information Institute. Available online: https://www.ngii.go.kr/eng/main.do? (accessed on 24 August 2021).
- ITU. Attenuation by Atmospheric Gases and Related Effects. Available online: https://www.itu.int/rec/R-REC-P.676-12-201908-I/en (accessed on 24 August 2021).
- ITU. Propagation Data and Prediction Methods Required for the Design of Terrestrial Line-of-Sight Systems. 2017. Available online: https://www.itu.int/rec/R-REC-P.530-17-201712-I (accessed on 24 August 2021).
- ITU. Characteristics of Precipitation for Propagation Modelling, International Telecommunication Union 2017. Available online: https://www.itu.int/rec/R-REC-P.837-7-201706-I/en (accessed on 24 August 2021).
- ITU. Specific Attenuation Model for Rain for Use in Prediction Methods 2005. Available online: https://www.itu.int/rec/R-REC-P.838-3-200503-I/en (accessed on 24 August 2021).
- Shayea, I.; Rahman, T.A.; Azmi, M.H.; Islam, R. Real measurement study for rain rate and rain attenuation conducted over 26 Ghz microwave 5G link system in Malaysia. IEEE Access 2018, 6, 19044–19064. [Google Scholar] [CrossRef]
- Nalinggam, R.; Ismail, W.; Singh, M.J.; Islam, M.T.; Menon, P.S. Development of rain attenuation model for Southeast Asia equatorial climate. IET Commun. 2013, 7, 1008–1014. [Google Scholar] [CrossRef]
- Shrestha, S.; Choi, D.-Y. Rain attenuation study over an 18 GHz terrestrial microwave link in South Korea. Int. J. Antennas Propag. 2019, 2019, 1712791. [Google Scholar] [CrossRef] [Green Version]
- Shebani, N.M.; Kaeib, A.F.; Zerek, A.R. Estimation of rain attenuation based on ITU-R model for terrestrial link in Libya. In Proceedings of the 5th International Conference of Control Signal Processing, Kairouan, Tunisia, 28–30 October 2017. [Google Scholar]
- Kestwal, M.C.; Joshi, S.; Garia, L.S. Prediction of rain attenuation and impact of rain in wave propagation at microwave frequency for tropical region (Uttarakhand, India). Int. J. Microw. Sci. Technol. 2014, 2014, 958498. [Google Scholar] [CrossRef] [Green Version]
- Islam, R.; Rahman, T.A.; Karfaa, Y. Worst-month rain attenuation statistics for radio wave propagation study in Malaysia. In Proceedings of the 9th Asia-Pacific Conference on Communications, Penang, Malaysia, 21–24 September 2003; Volume 3, pp. 1066–1069. [Google Scholar]
- Jicha, O.; Pechac, P.; Kvicera, V.; Grabner, M. On the uncertainty of refractivity height profile measurements. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 983–986. [Google Scholar] [CrossRef]
- Blake, L.V. Radar Range-Performance Analysis; Munro Pub. Co.: Silver Spring, MD, USA, 1991. [Google Scholar]
- Mailloux, R.J. Phased Array Antenna Handbook, 3rd ed.; Artech House: Norwood, MA, USA, 2018. [Google Scholar]
- Nathanson, F.E.; O’Reilly, P.J.; Cohen, M.N. Radar Design Principles: Signal Processing and the Environment; Scitech Publ.: Raleigh, NC, USA, 2004. [Google Scholar]
- Ozgun, O.; Apaydin, G.; Kuzuoglu, M.; Sevgi, L. PETOOL: MATLAB-based one-way and two-way split-step parabolic equation tool for radiowave propagation over variable terrain. Comput. Phys. Commun. 2011, 182, 2638–2654. [Google Scholar] [CrossRef]
- ITU. A Propagation Prediction Method for Aeronautical Mobile and Radionavigation Services Using the VHF, UHF and SHF Bands 2019. Available online: https://www.itu.int/rec/R-REC-P.528-4-201908-I/en (accessed on 24 August 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height (m) | Air Pressure (hPa) | Temperature (°C) | Relative Humidity (%) | Refractivity (M-Unit) |
|---|---|---|---|---|
| 80 | 1015 | 6 | 87 | 333.7 |
| 752.2 | 934.8 | 4.5 | 9.6 | 383.3 |
| 1477.2 | 855.1 | 4.7 | 14.5 | 476.7 |
| 2229.8 | 779.6 | 2.9 | 10.1 | 572.9 |
| 2999.6 | 708.2 | –2.7 | 10.6 | 676.9 |
| 3793.1 | 640.3 | –7.9 | 10.3 | 784.7 |
| Scenario I | Scenario II | Scenario III | |
|---|---|---|---|
| Scan range (Rt) | 0–190 km | 0–190 km | 0–190 km |
| Elevation steering angle | −4.3° | −4.3° | −1.8–31° |
| Scan angle (ϕscan) | −20–70° | −20–70° | 0° |
| Atmospheric condition (∇M) | Normal (∇M = 85) Sub (∇M = 300) Super (∇M = 10) Ducting (∇M = −80) | Normal (∇M = 85) Super (∇M = 10) | Normal (∇M = 85) |
| Weather condition (e) | Dry (0.1 g/m3) | Dry (0.1 g/m3) Rainfall (12 mm/h) | Dry (0.1 g/m3) Heavy rainfall (22 mm/h) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, T.-H.; Choo, H. Prediction of Target Detection Probability Based on Air-to-Air Long-Range Scenarios in Anomalous Atmospheric Environments. Remote Sens. 2021, 13, 3943. https://doi.org/10.3390/rs13193943
Lim T-H, Choo H. Prediction of Target Detection Probability Based on Air-to-Air Long-Range Scenarios in Anomalous Atmospheric Environments. Remote Sensing. 2021; 13(19):3943. https://doi.org/10.3390/rs13193943
Chicago/Turabian StyleLim, Tae-Heung, and Hosung Choo. 2021. "Prediction of Target Detection Probability Based on Air-to-Air Long-Range Scenarios in Anomalous Atmospheric Environments" Remote Sensing 13, no. 19: 3943. https://doi.org/10.3390/rs13193943