In the simulated data experiment, hyperspectral dataset Pavia Centre is taken, which was collected by the ROSIS (Reflective Optics Imaging Spectrometer) in July 2002, in Pavia, a northern city of Italy. The dataset contains 102 bands at the range of 0.43–0.86 μm, with spatial resolution of 1.3m and image size of 1096 × 1096. After removing the atmospheric absorption bands, the remaining 80 bands are considered as noise-free images. In the experiment, a dataset sized 256 × 256 × 80 is used as reference image to add simulated noise.
The absolute error for a whole HSI dataset is the average value of the absolute errors of all the bands.
5.1.1. Selection of the Number of Superpixels
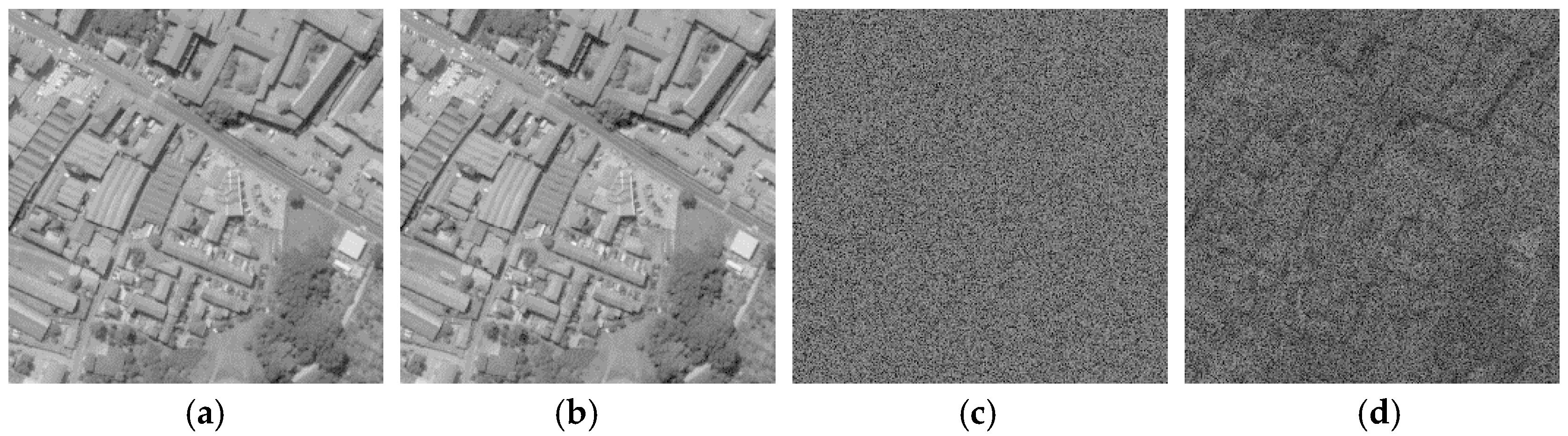
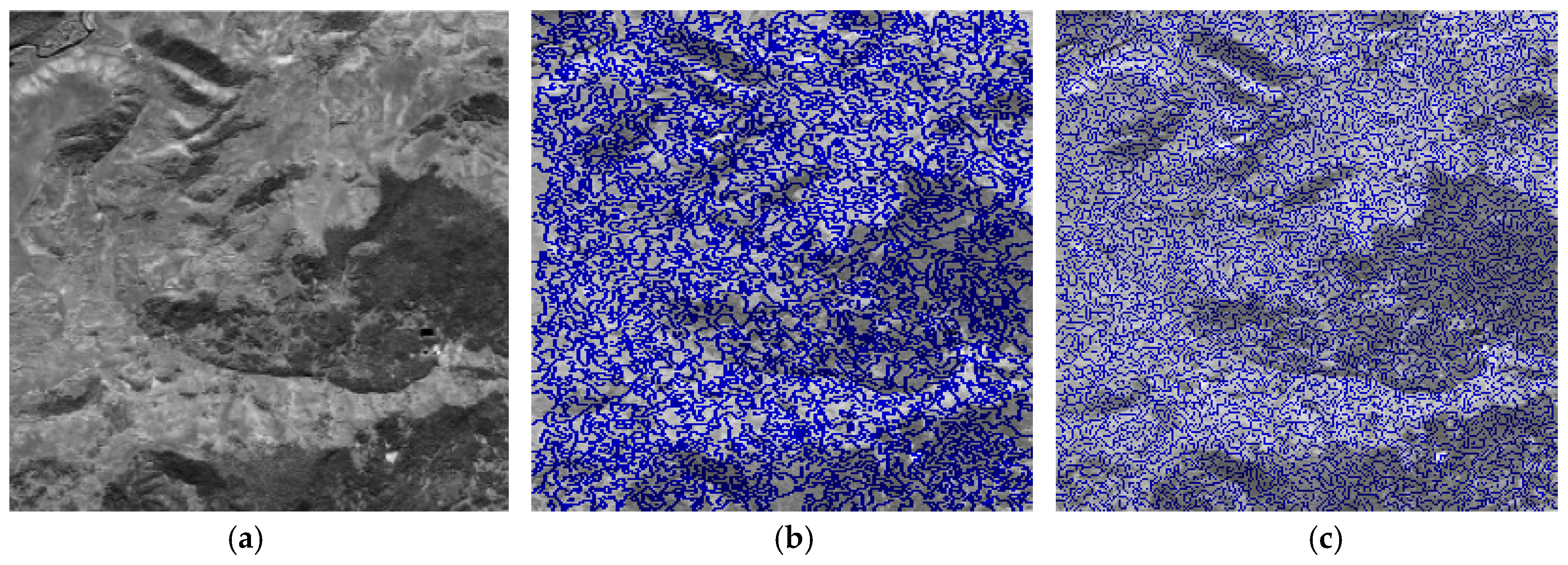
In this experiment, 30 dB noise is added to each band of HSI. According to the definition of SNR, the noise power in each band is proportional to the power of the noise-free signals in the corresponding band. Since the intensity varies with the wavelength, the noise level varies with the wavelength. The ratio of the SI noise power to the SD noise power is 1:1, that is to say, the power of SI noise and SD noise is competitive, none of which can be ignored when estimated. In
Figure 1a,b, it is difficult for human eyes to distinguish the slight difference between the noise-free data and the noisy data of 30 dB noise. However, in many HSI post-processing methods that are sensitive to noise, 30 dB is high enough to reduce the performance significantly [
28,
29]. Therefore, we first choose 30 dB noise with
for the experiment.
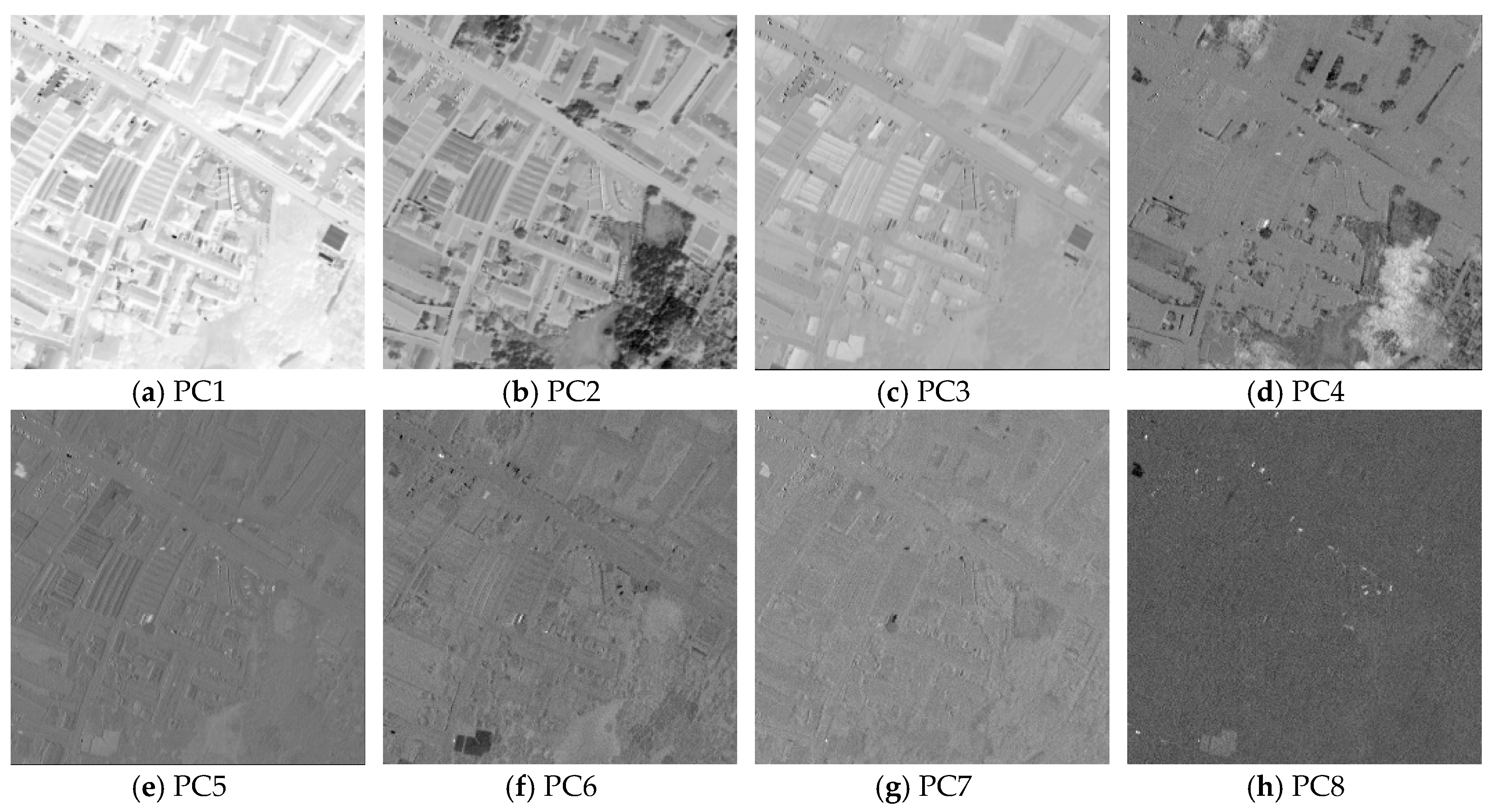
The first step of the algorithm is MNF.
Figure 2 gives the top eight PCs obtained by MNF with the dataset Pavia Centre. The first PC has the strongest signal power, while the following PCs contain less signal power. Since the noise in HSI has been processed by the noise-whitening matrix, the first PC has the highest SNR compared to the other PCs. This advantage ensures the performance of the subsequent superpixel segmentation.
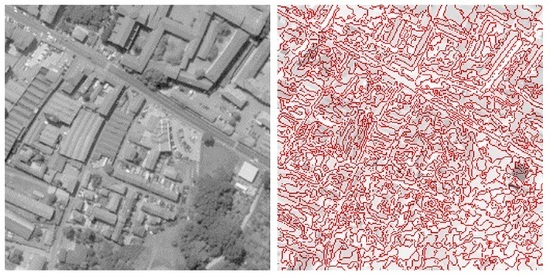
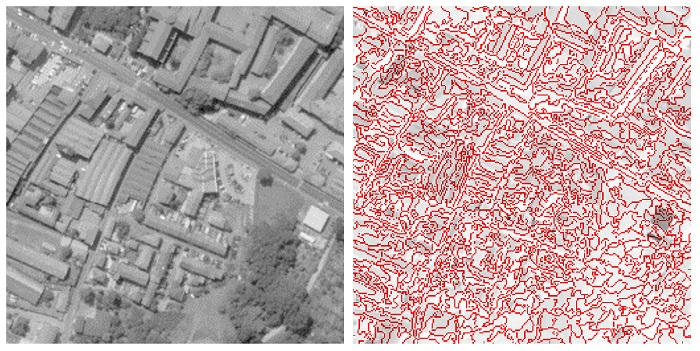
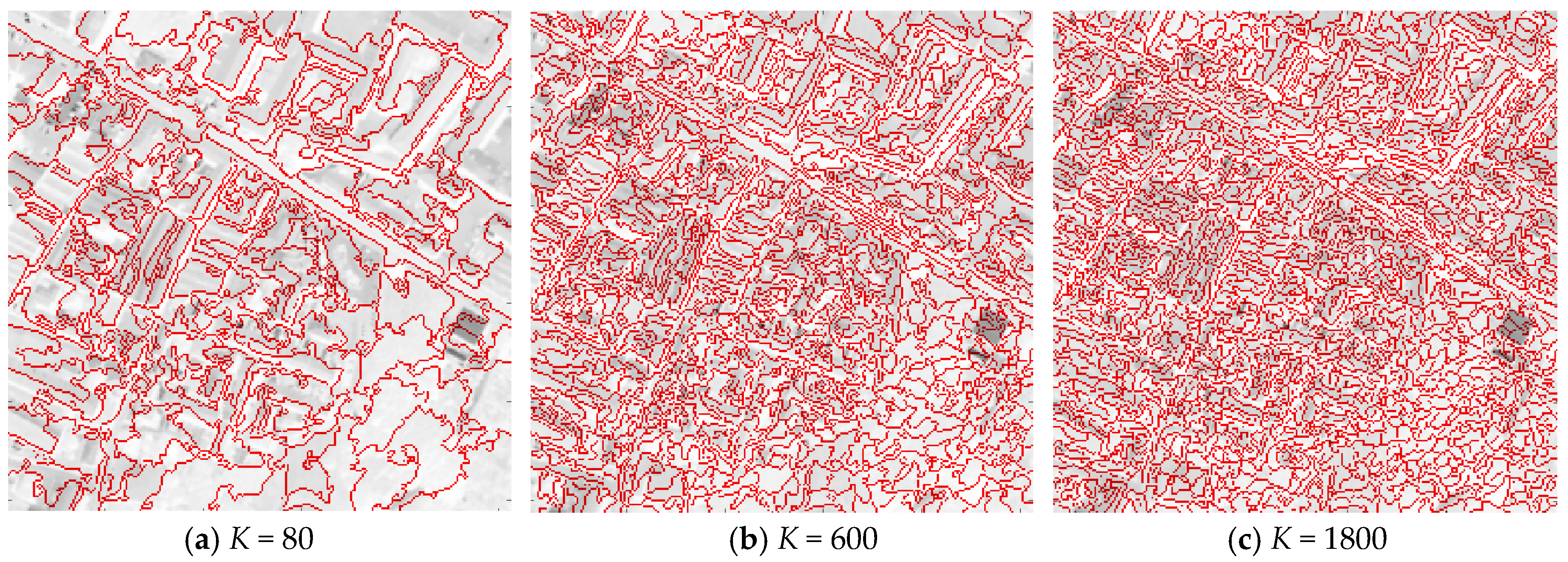
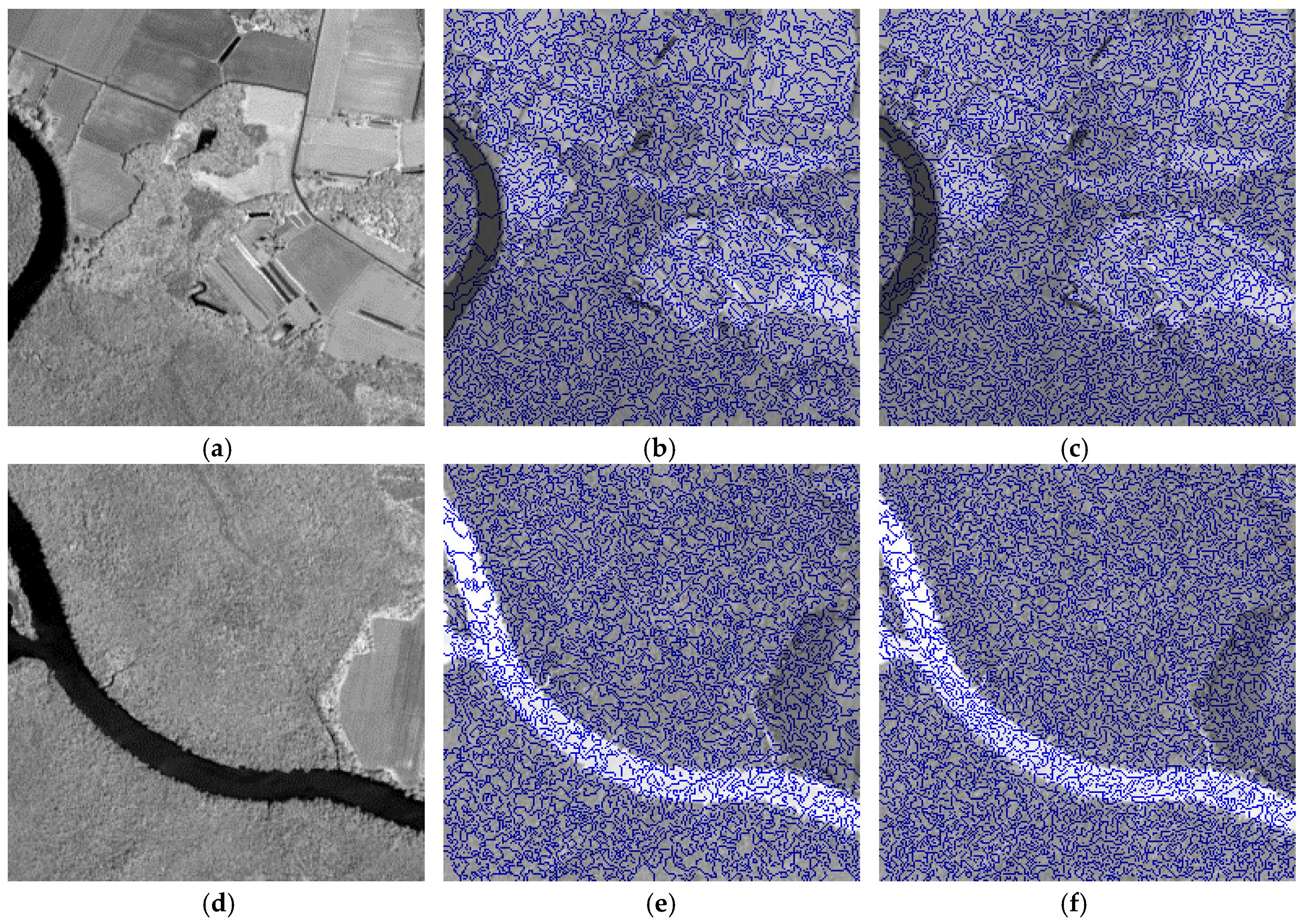
The superpixel segmentation results achieved by the ERS on PC1 are given in
Figure 3, where the superpixel number
K is 80, 600 and 1200. Note that the superpixel number has a direct impact on the final noise estimation result. Therefore, it is necessary to determine a reasonable number
K.
In the block-based MLRLS [
21], the size of a block is 7 × 7. In this paper, more sizes
N ×
N (height
width) each of them is viewed, where
N ranges from 2 to 32. Meanwhile, in order to find a proper number
K of the superpixels in the superpixel-based MLRLS, different numbers
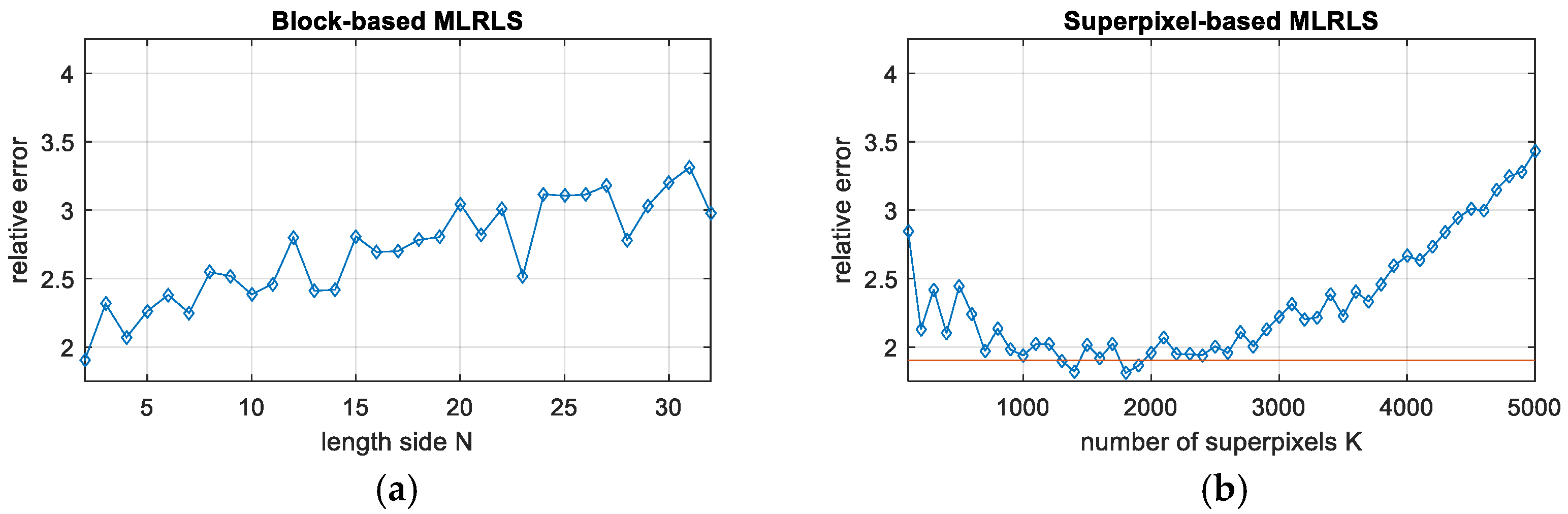
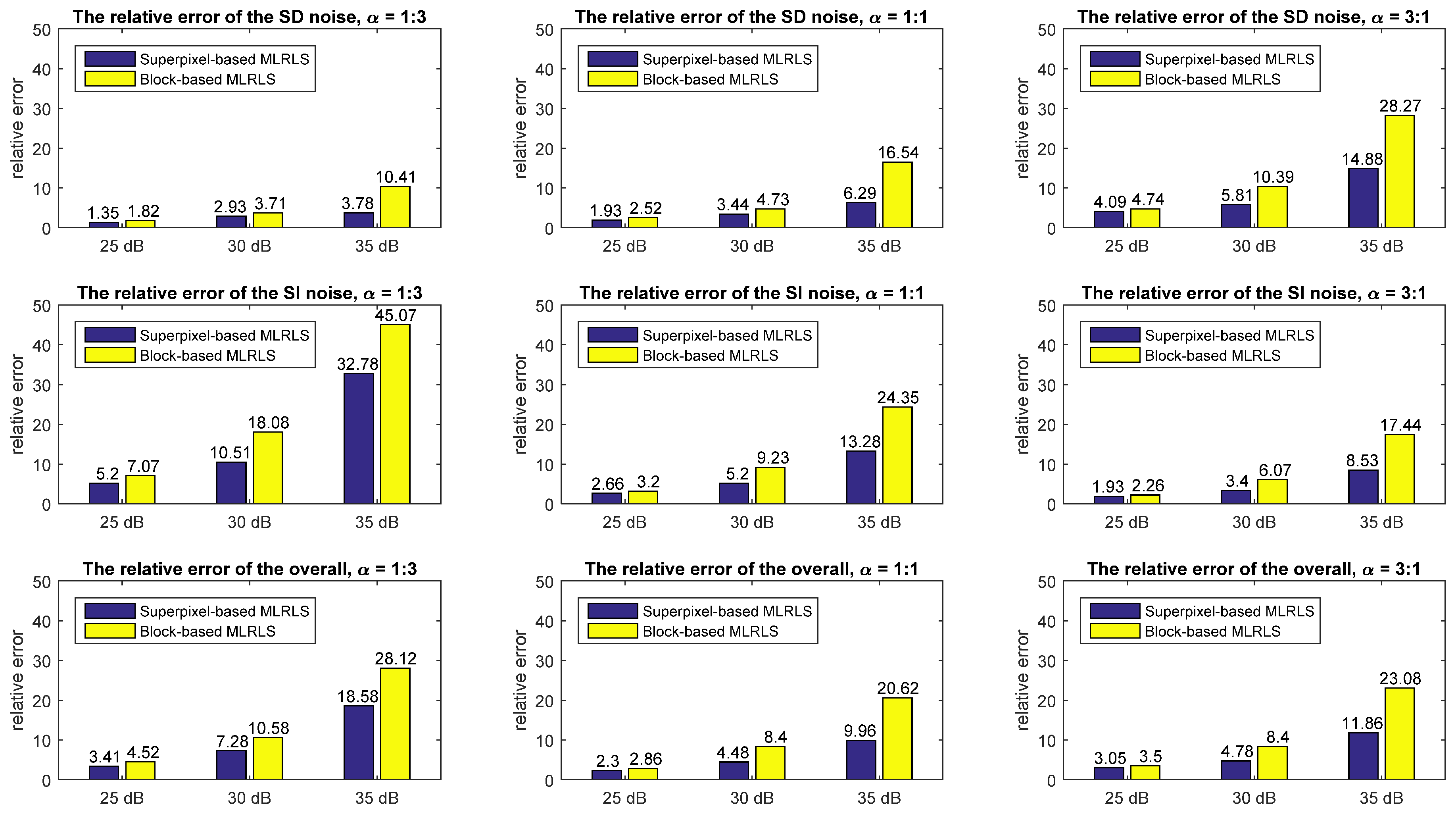
K are tested from 100 to 5000 with a step size of 100. The relative errors of the SD noise estimated by the block-based MLRLS and the superpixel-based MLRLS are given in
Figure 4. The minimal relative error of the block-based MLRLS is 1.90%, with the length side of a block being
. When
N is in a range from 2 to 7, the relative error varies stably in a narrow interval (1.90, 2.38). The blue curve in
Figure 5b shows the relative error of the SD noise estimated by the superpixel-based MLRLS, and the red line is the minimal relative error of the block-based MLRLS. When
is in a wide interval [900, 2600], the relative error fluctuates slightly along the red line, and is limited in a narrow interval (1.81, 2.07). The minimal relative error for the superpixel-based MLRLS is 1.81%, with
.
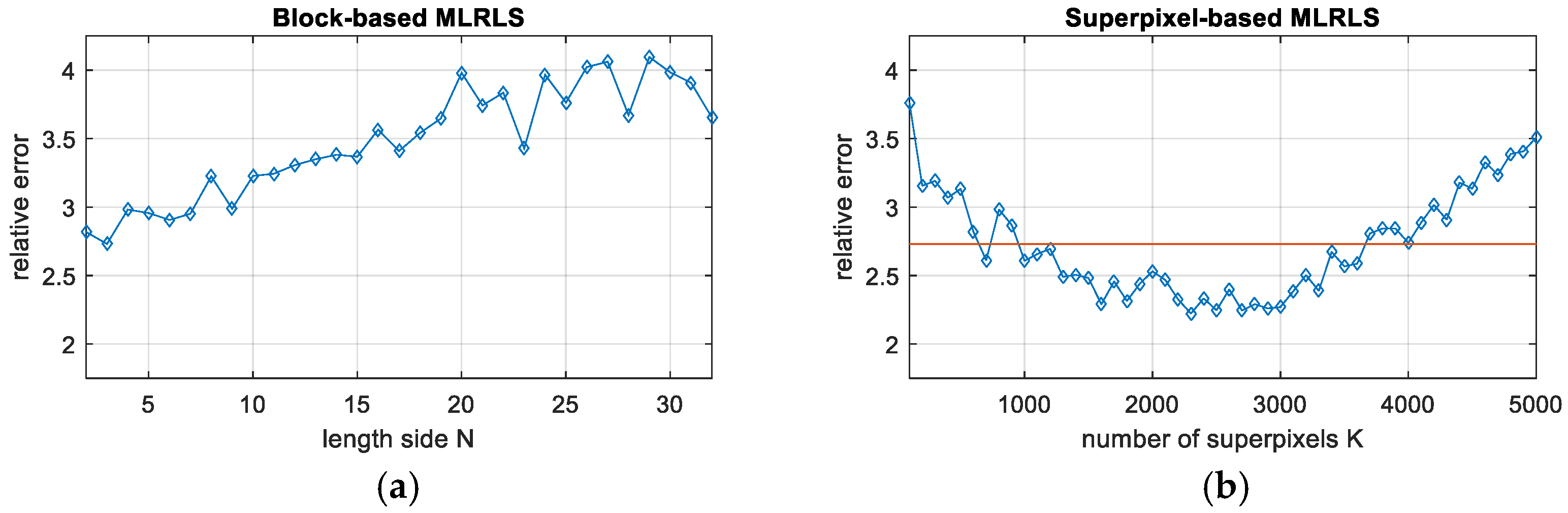
Figure 5 shows the relative errors of the SI noise estimated by the block-based MLRLS and the superpixel-based MLRLS. In
Figure 5a, the minimal relative error of the block-based MLRLS is 2.73%, with
. When
N is in the range from 2 to 7, the relative error varies stably and is limited in a narrow interval (2.73, 2.98).
Figure 5b shows the relative errors of the SI noise estimated by the superpixel-based MLRLS. The minimal relative error of the superpixel-based MLRLS is 2.22%, with
. When
is in a wide interval [1000, 3600], all the values of the relative errors are below the red line. This means that the number of superpixels
taken in a large range can ensure that the relative error is smaller than that of the block-based MLRLS. Meanwhile, when
is in the interval (1300, 3300), the relative error fluctuates slightly in a narrow interval (2.22, 2.53).
Since the relative errors of both the SD noise and the SI noise do not always achieve the minimal value at the same point
N or
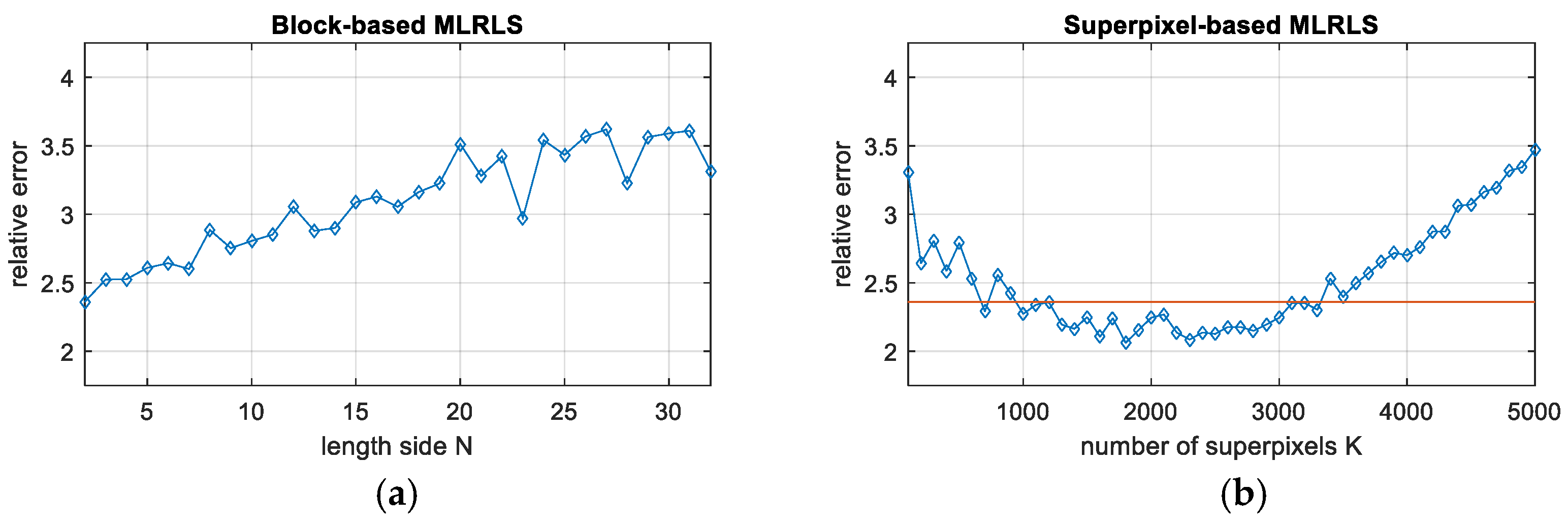
, the average value of the relative errors of the SD noise and the SI noise is also tested for an overall optimization.
Figure 6 shows the relative errors for the overall optimization taking both the SD and SI noise into account. The minimal relative error of the block-based MLRLS is 2.36%, with
. When
N is in a range of 2 to 7, the relative error varies stably in a narrow interval (2.36, 2.64). As
N becomse large, the general trend of the relative error becomes large. The reason for this phenomenon is that when the size of a block becomes large, it will contain more types of ground objects in an identical block, which will lead to inhomogeneous regions in one block and violate to assumption of homogeneity. In
Figure 6b, the minimal relative error of the superpixel-based MLRLS is 2.06%, with
. When
is in a wide interval [1000, 3300], all the relative errors of the superpixel-based MLRLS are smaller than the minimal relative error of the block-based MLRLS. Meanwhile, when
is in the range of (1300, 3300), the relative error fluctuates slightly in a narrow interval (2.06, 2.27).
By the comparison, the minimal relative error of the noise with estimated by the superpixel-based MLRLS is smaller than that of the block-based MLRLS with . However, the selection of the optimal length side of a block in the block-based MLRLS and the optimal number of superpixels in the superpixel-based MLRLS is dependent of the HSI dataset, and involves many factors such as the noise level, the edges, etc. The above experimental analysis indicates that the superpixel-based MLRLS can still perform better than the block-based MLRLS with a wide selection of when the ground truth noise is unknown.
5.1.2. Experiments for Different Cases
In this section, the algorithm is carried out on HSIs with different noise levels and different noise components. 25 dB, 30 dB and 35 dB noises with different
are added on the hyperspectral dataset Pavia Centre.
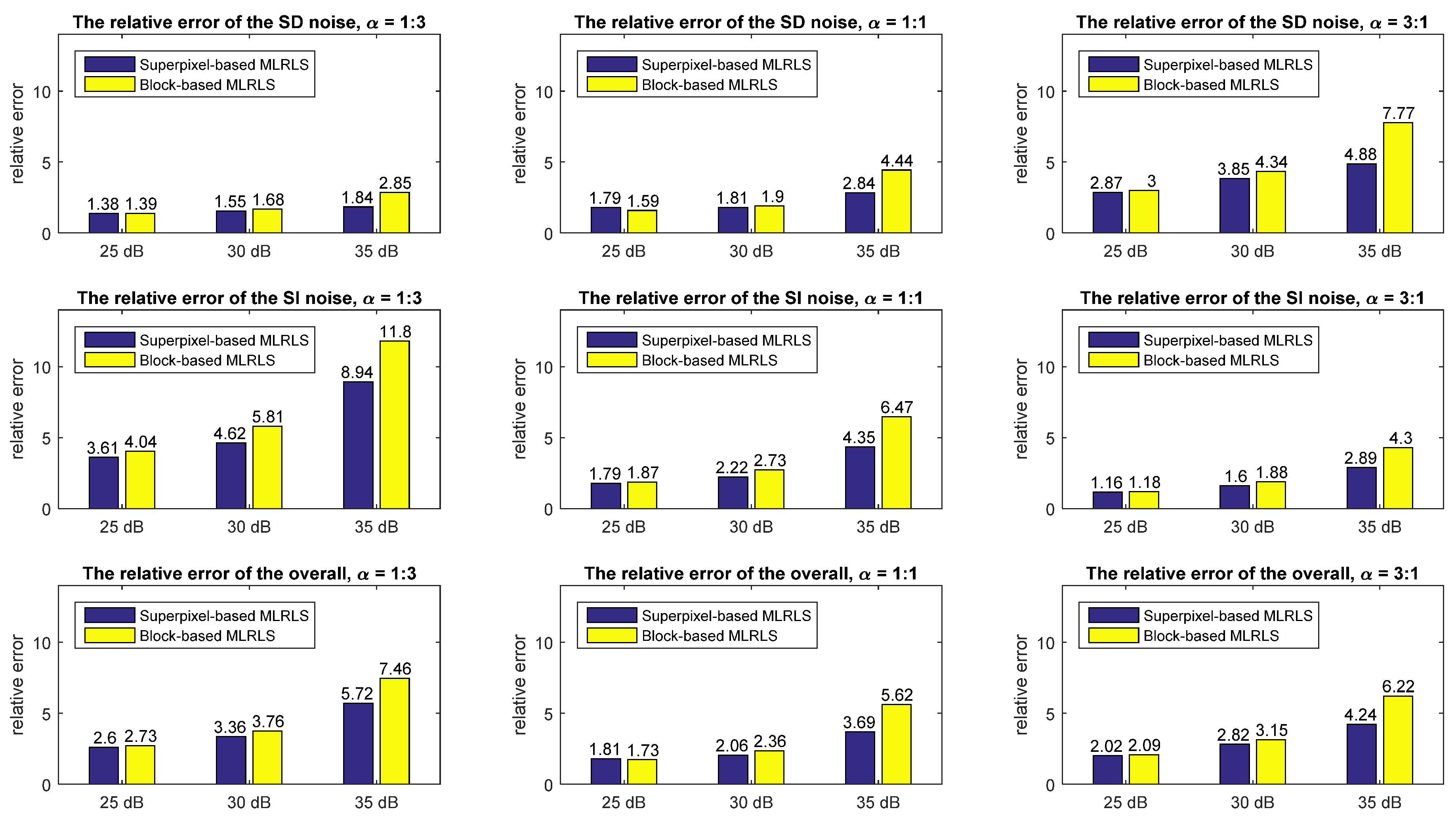
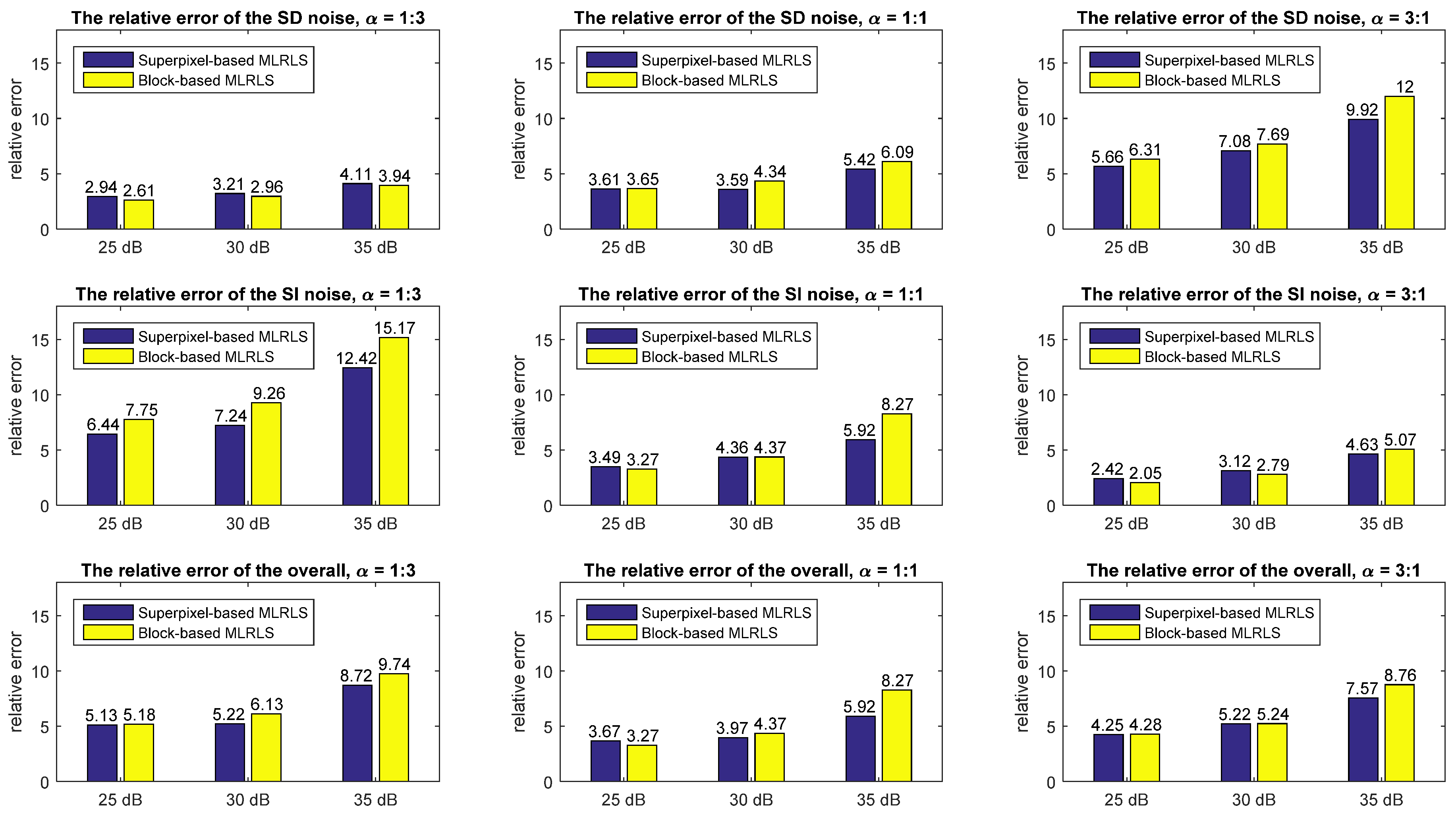
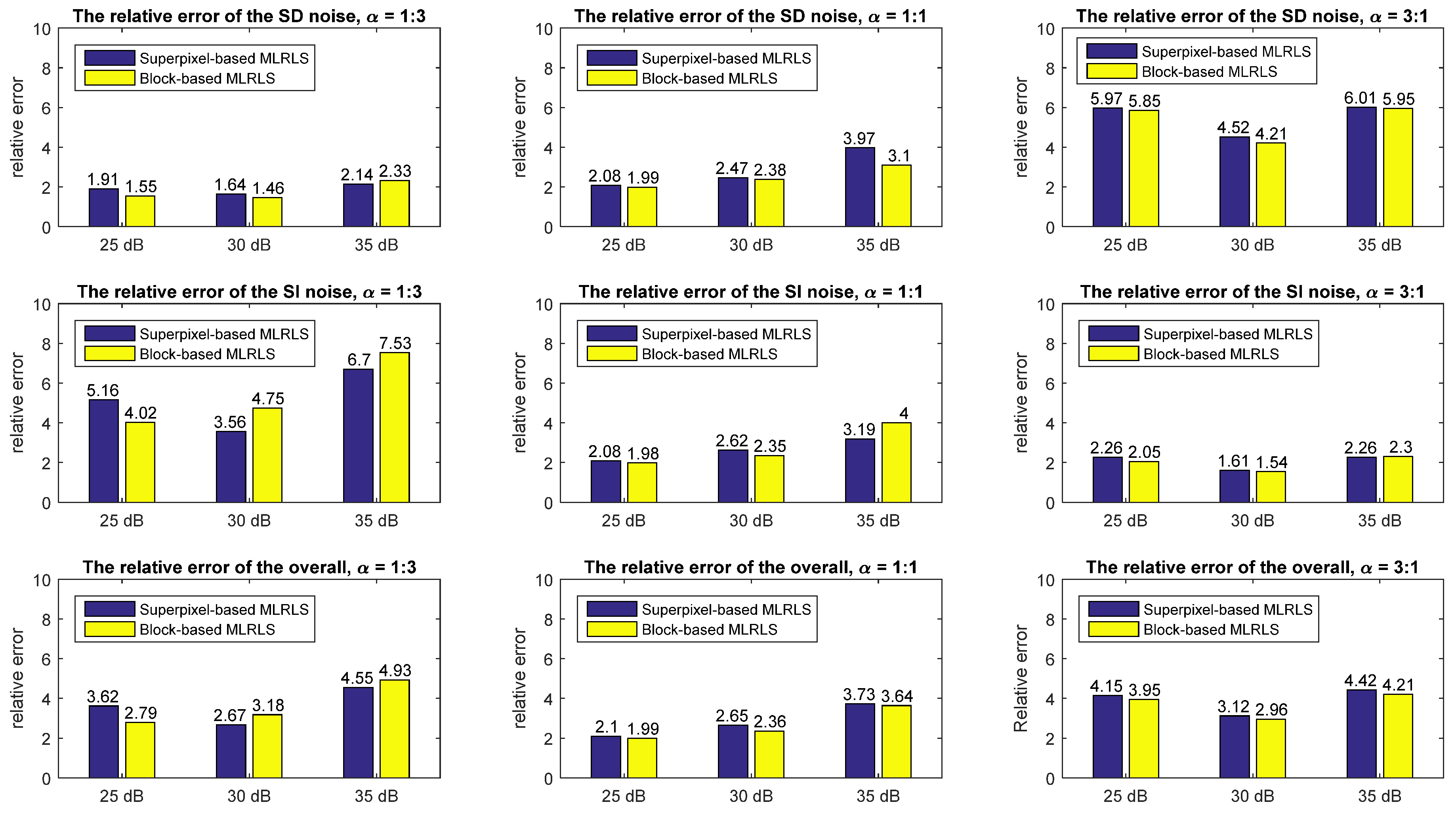
Table 1 and
Figure 7 show the relative errors of the superpixel-based MLRLS, the block-based MLRLS [
21], and MLRML [
19].
When SNR = 25 dB, the proposed algorithm does not improve much in terms of the relative errors. When
, the overall relative error is only reduced by 0.13%, and when
, the overall relative error is only reduced by 0.07%. When
, the accuracy is slightly decreased. At low SNR, the high level noise affects the accuracy of superpixel segmentation and subsequently degrades the performance of the proposed algorithm. Therefore, when the noise level is high, the superiority of the superpixel-based MLRLS is not obvious over the block-based MLRLS. When SNR = 30 dB, the overall relative error of the superpixel-based MLRLS is 0.34% less than that of the block-based MLRLS, while when SNR = 35 dB, the overall relative error is 1.88% less than that of the block-based MLRLS, and the estimation accuracy is improved by 1.01%–2.89%. As the SNR becomes larger, the superpixel segmentation performs better. Therefore,
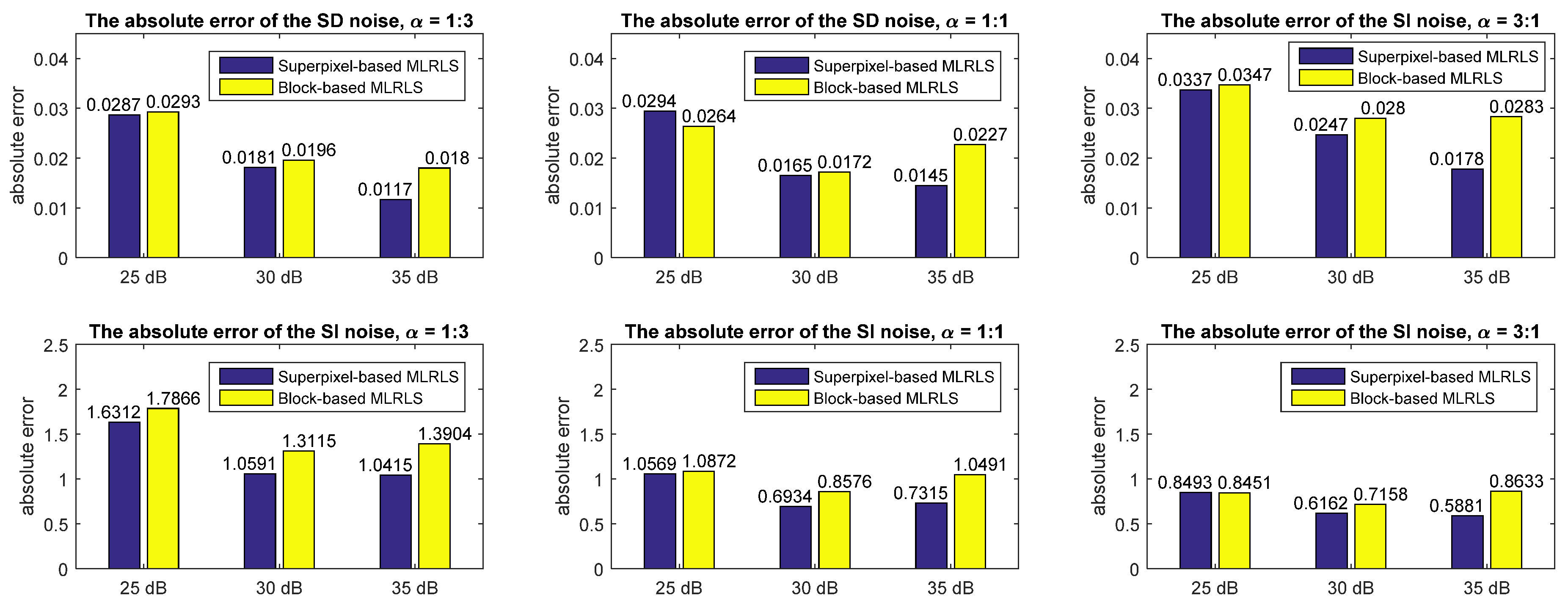
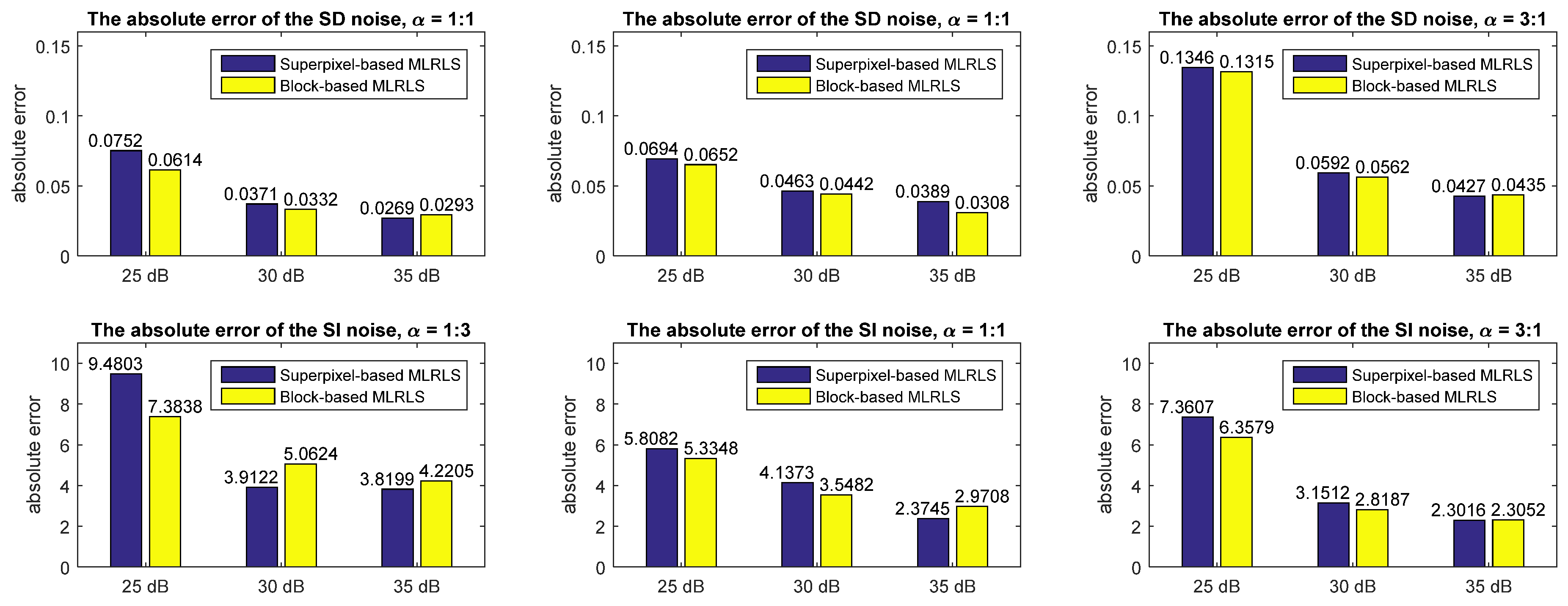
Table 1 shows that the superpixel-based MLRLS outperforms the block-based MLRLS, especially for high-SNR images. In addition, the absolute errors are listed in
Table 2 and
Figure 8. These figures indicate that the absolute errors decrease with a higher SNR. Meanwhile, the MNF approach and using superpixel segmentation to find homogenous regions play an important role in the mixed noise estimation, especially for HSIs of high SNRs.
A bar plot of
Table 1 is given in
Figure 7. As shown in
Table 1 and
Figure 7, the relative error becomes large as the SNR increases. However, this does not mean that a high SNR may lead to poor performance. In fact, a high SNR can ensure the performance of superpixel segmentation, which improves accuracy in terms of the absolute error. Since the standard deviations of the SD noise and the SI noise vary greatly in magnitude, to compare them at the same level, the relative error
is introduced for normalization. In
, if
becomes smaller,
becomes larger. That is to say,
is smaller with a higher SNR, accordingly, the relative error
becomes larger. To eliminate this misunderstanding that a high SNR leads to poor performance, the absolute errors
are also calculated in the experiments.
Table 2 and
Figure 8 show the absolute errors at different noise levels and in different cases. When the SNR is higher, the absolute errors are smaller.
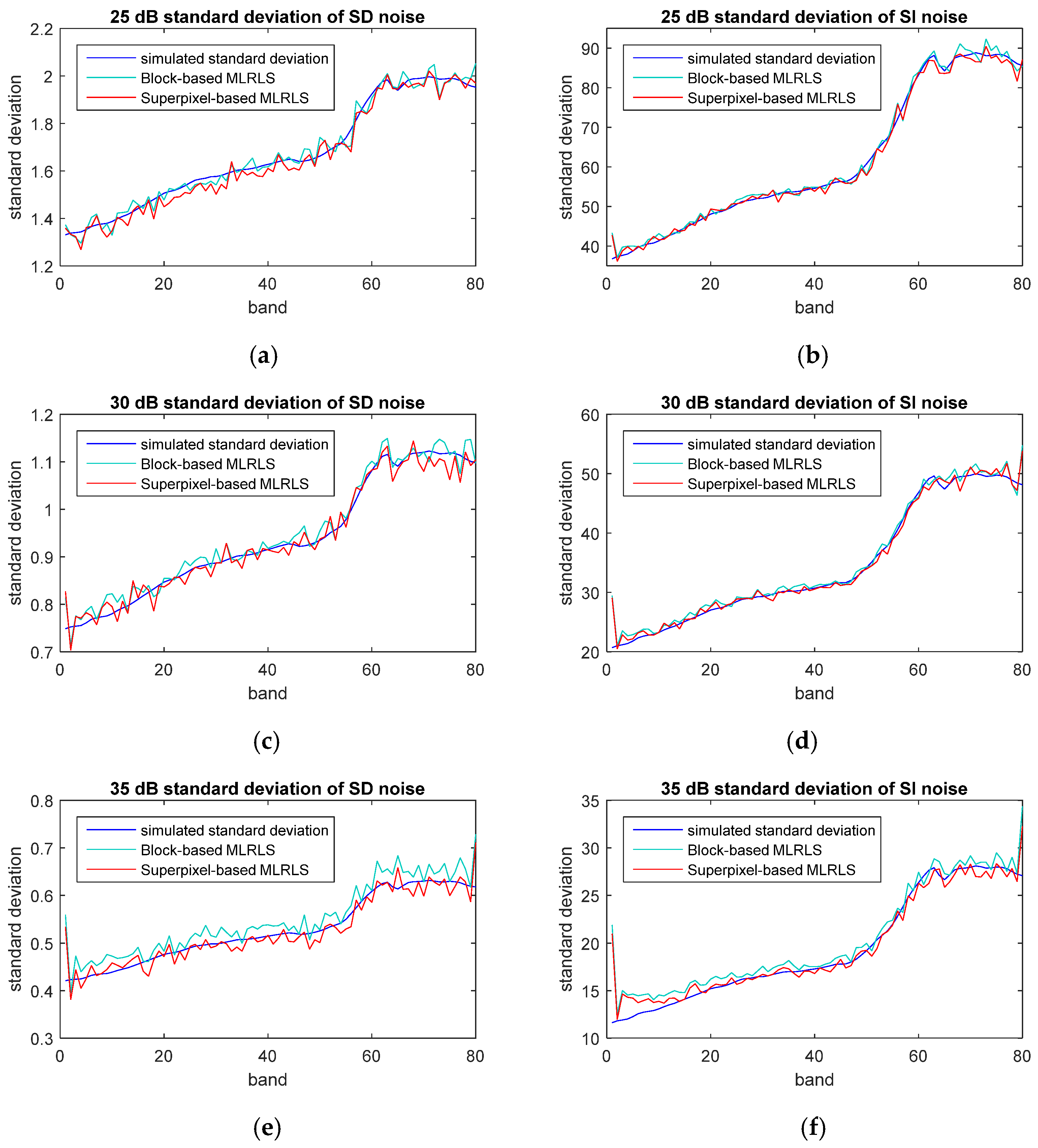
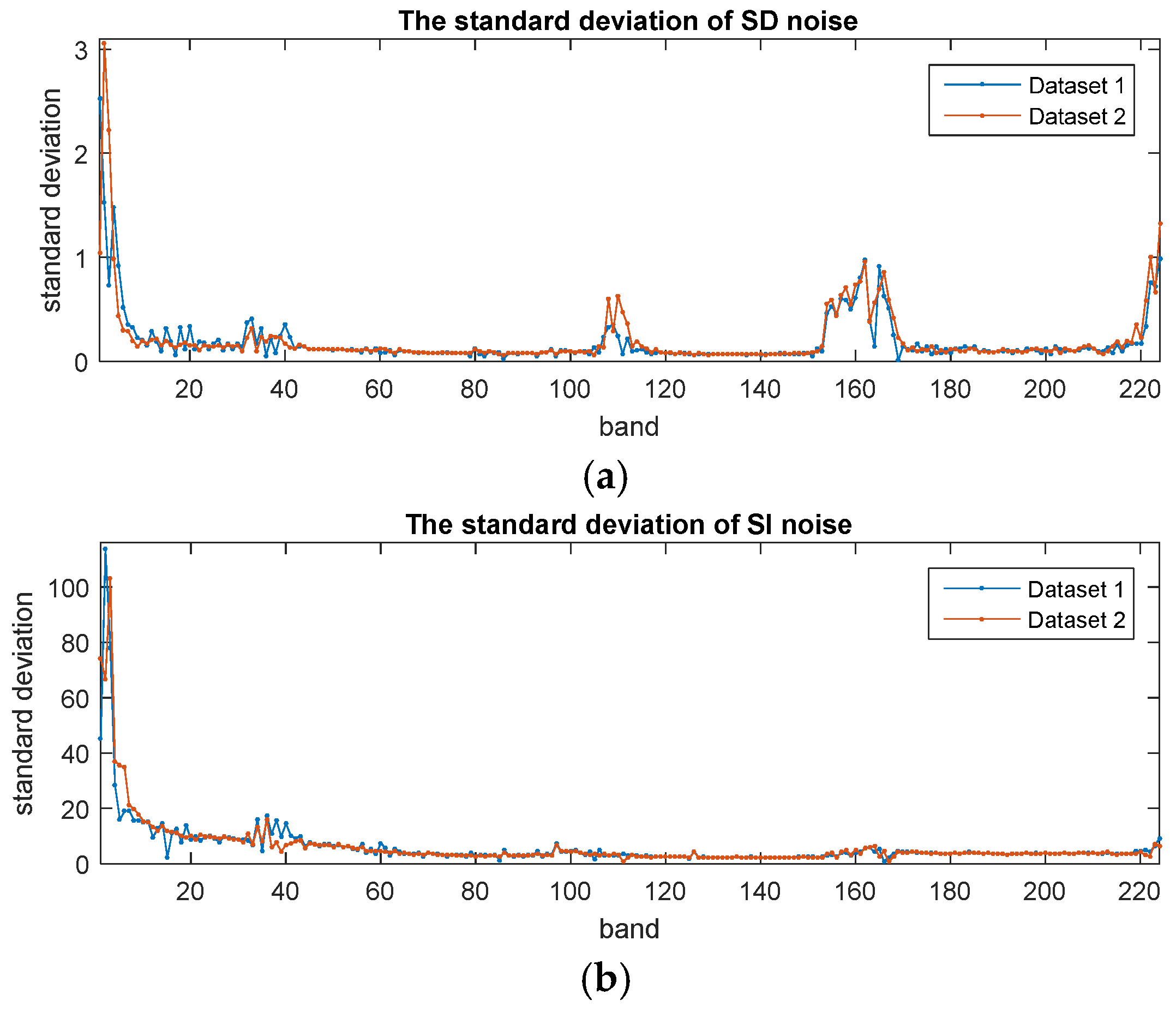
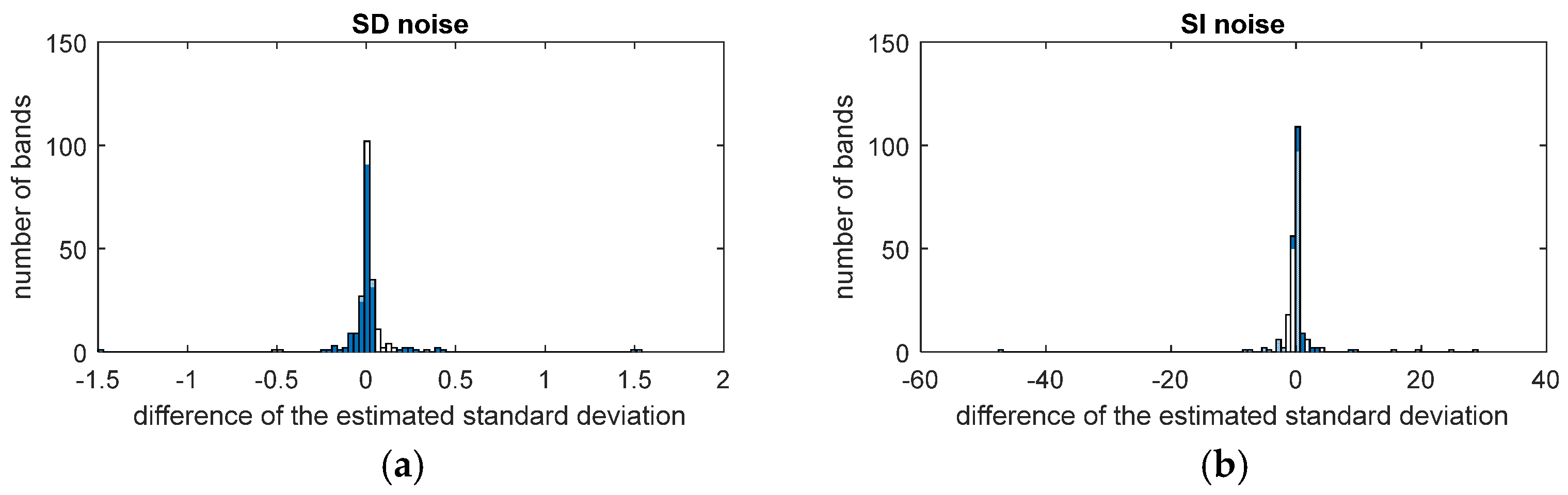
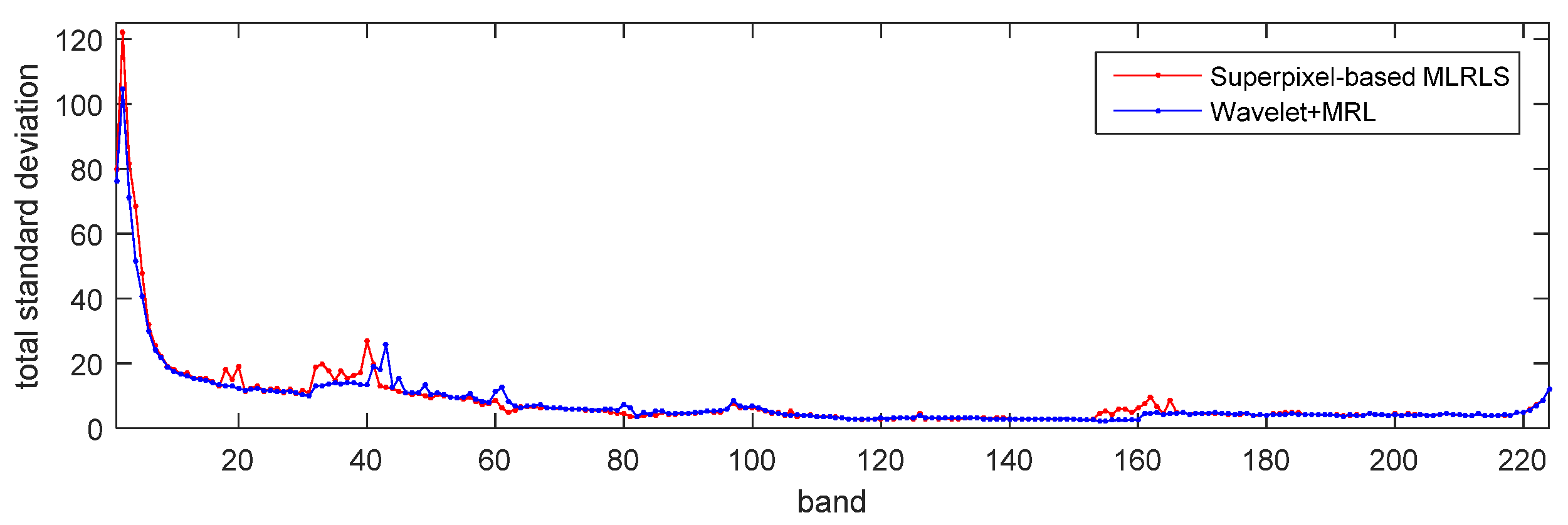
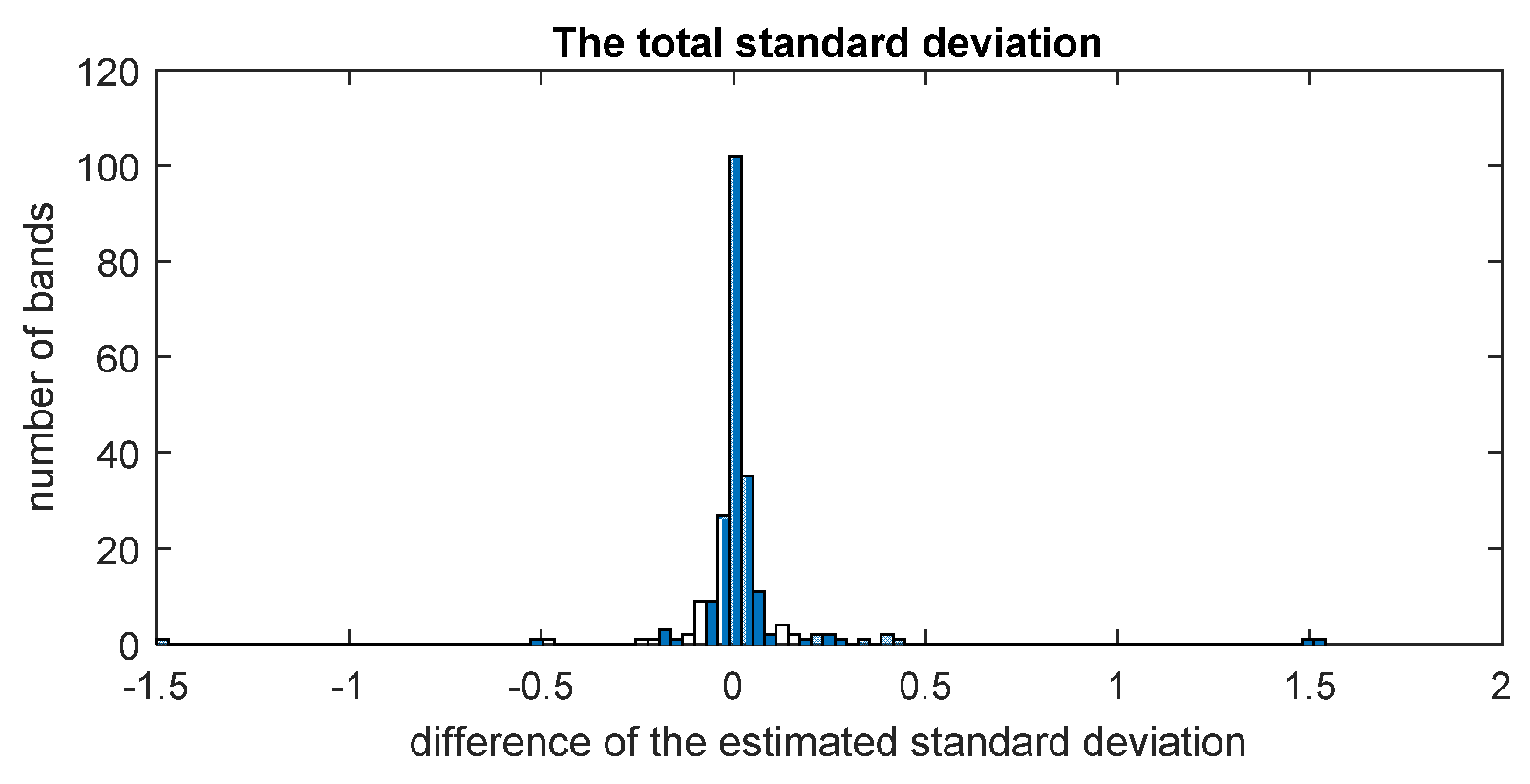
Figure 9 shows the standard deviation of the estimated SD and SI noise in each band compared with that of the synthetic noise, when
, and
SNR = 25 dB, 30 dB and 35 dB, respectively. When
SNR = 35 dB, the curve of the standard deviation of the superpixel-based MLRLS is obviously closer to that of the synthetic noise than that of the block-based MLRLS.
Furthermore, the proposed algorithm is compared with the MLRML method [
19]. The MLRML only takes high spectral correlation into account, but ignores spatial correlation. When
SNR = 25 dB, the noise level is high, the performance of the noise estimation achieved by the MLRML is acceptable. When the noise level is low, the MLRML fails to distinguish subtle difference between the noise and the details of the HSIs, which leads to an inaccurate noise estimation.
The experimental results with different noise levels and different noise components indicate that with the development of imaging quality using modern spectrometers, the proposed algorithm the superpixel-based MLRLS is more suitable for the noise estimation of modern HSI datasets.
Next, we will discuss the selection of the side length of a block in the block-based MLRLS and the number of the superpixels in the superpixel-based MLRLS at different noise levels.
Table 3 shows the side length
when the block-based MLRLS gets the optimal relative errors at different noise levels. It indicates that
fluctuates in a range from 2 to 8, and the average value of
is 4.04. Therefore,
is recommended for the block-based MLRLS performed on the real-life data when the ground truth noise is unknown.
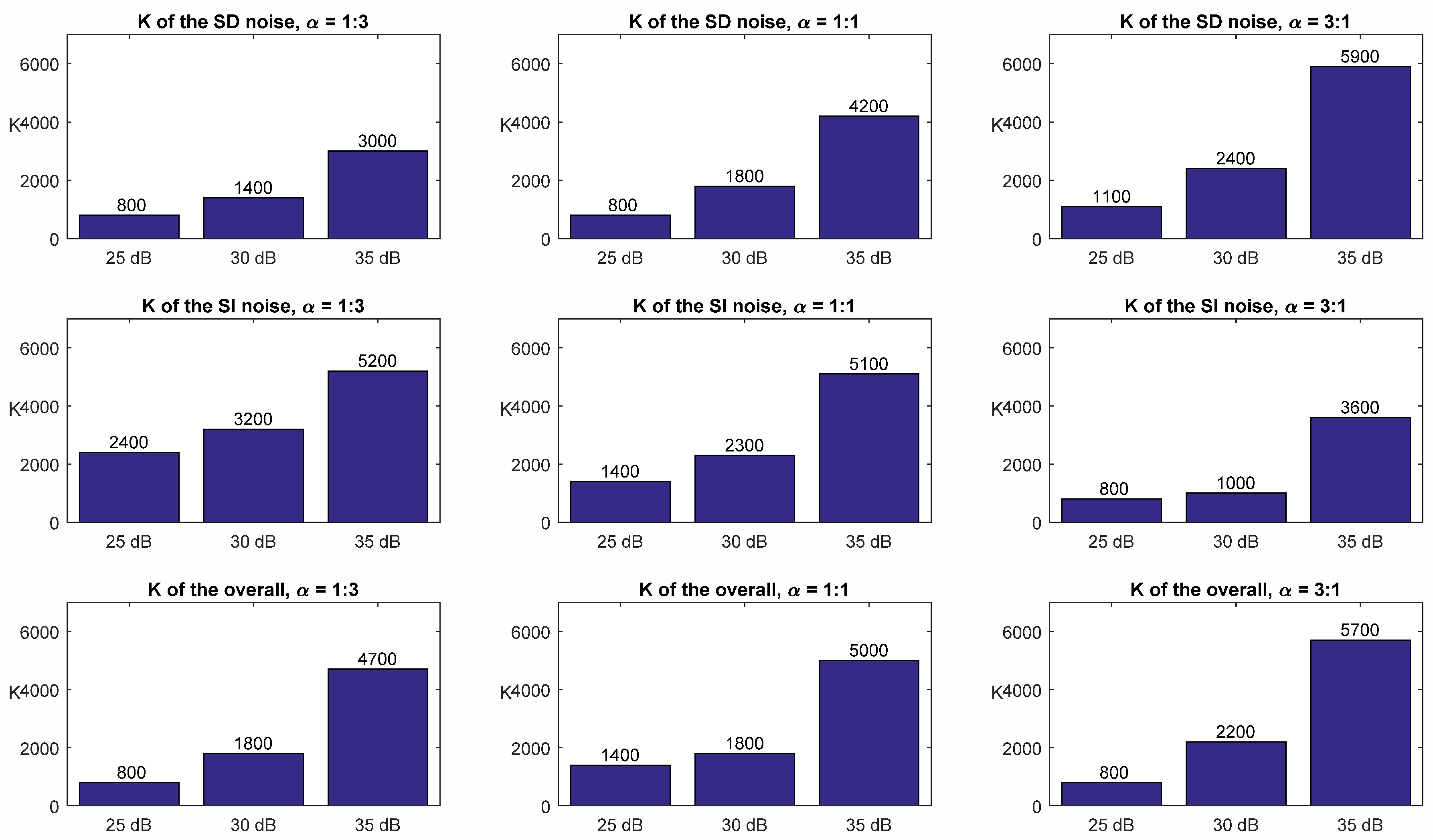
Table 4 and
Figure 10 show the number of superpixels
when the superpixel-based MLRLS achieves the optimal relative errors at different noise levels. As can be seen, the optimal
is from 800 to 5700, and the average value of
is 2614.8, i.e., on average, 25 pixels in a superpixel. Meanwhile, when SNR = 25 dB, the average value of
is 1144.4, i.e., on average, 57 pixels in one superpixel; when SNR = 30 dB, the average value of
is 1988.9, i.e., on average, 33 pixels in one superpixel; when SNR = 35 dB, the average value of
is 4711.1, i.e., on average, 14 pixels in one superpixel. Thus, the selection of
is dependent on the noise level of the HSIs. Therefore, it is recommended that on average, 25 pixels in one superpixel is selected in the superpixel-based MLRLS. If the noise level is high, one can choose more pixels in a superpixel, i.e., a smaller
, and vice versa.
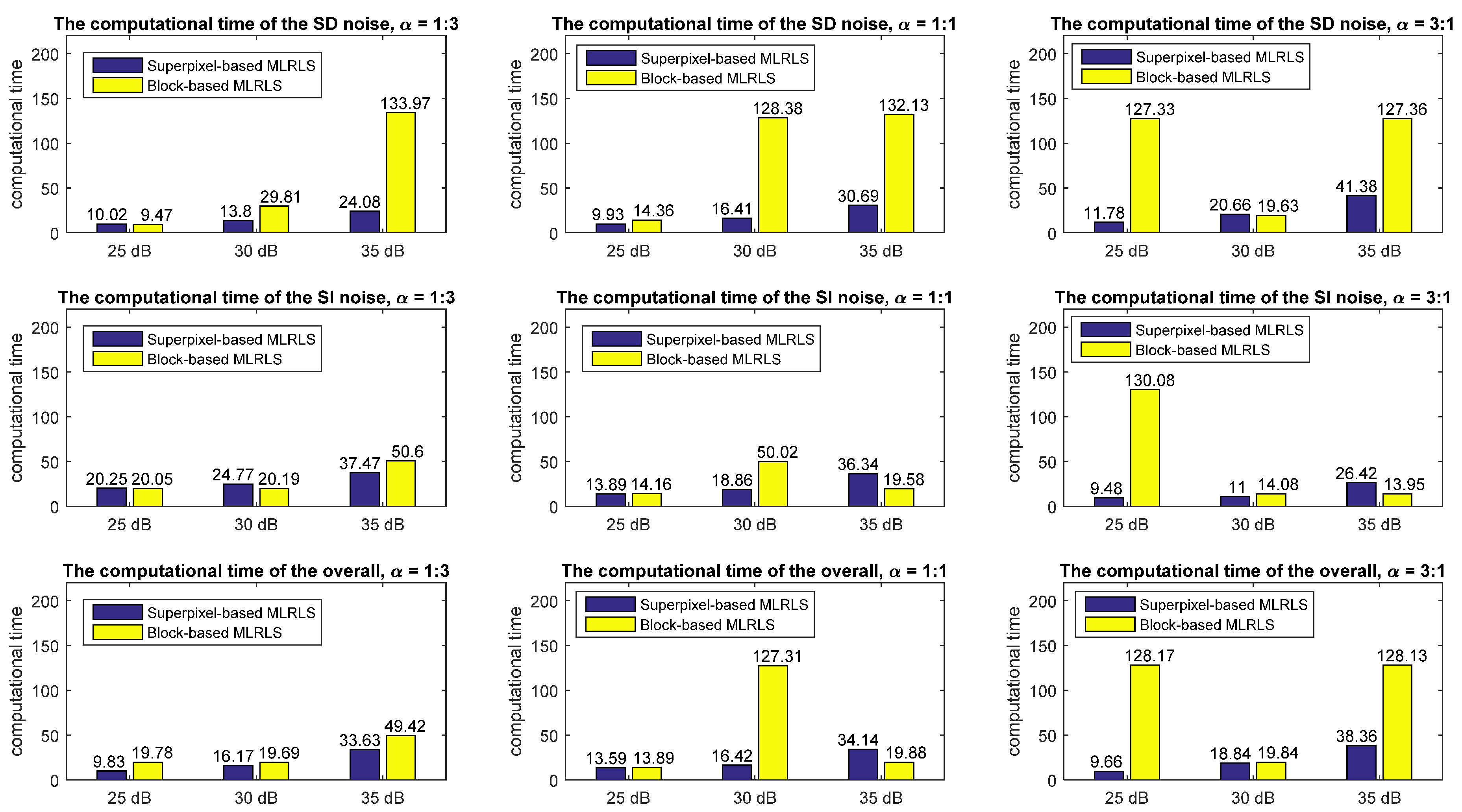
Table 5 and
Figure 11 show the computational time of the two algorithms. The algorithms are compiled and run in Matlab R2015a. The computer processor is Intel(R) Core(TM) i7-10710U CPU @1.10GHz and 1.61GHz, and the memory capacity is 16.0 GB. The average computational time of the superpixel-based MLRLS is 21.03 s, while the average computational time of the block-based MLRLS is 58.57 s. In the superpixel-based MLRLS, the computational time of MNF is 1.33 s, on average. The superpixel segmentation used in the proposed algorithm is based on a greedy optimization scheme, and is only performed on the first component. Therefore, the computational cost is not expensive. The superpixel segmentation takes only 0.32 s, on average. Most of the computational time is spent on calculating the matrix elements in Equations (24)–(26) and the least-squares method in Equation (28). The computational complexity is dependent on the number of superpixels or the number of blocks. Since the average number of superpixels
K is 2614.8, while the average side length
N of a block is 4.04, i.e., 16,222 blocks in the tested HSI data, the average computational time of the superpixel-based MLRLS is much lower than the block-based MLRLS.
5.1.3. Experiments on Low-Resolution Datasets
The proposed algorithm is based on the assumption that the HSIs have large spatial and spectral resolution. In this section, we discuss how lower spatial and spectral resolution affect the estimation performance of the proposed algorithm.
A. Lower Spatial Resolution
In this experiment, spatial subsampling is performed on the HSI dataset Pavia Centre to obtain a lower spatial resolution. The dataset is subsampled by 1:2 in spatial rows and 1:2 in columns, respectively. Thus, the subsampled dataset has a spatial resolution of 1:4 of the original image. The superpixel-based MLRLS and the block-based MLRLS are performed on the subsampled dataset. The estimated relative error is shown in
Table 6 and
Figure 12. This indicates that after spatial subsampling, the estimation errors of the two algorithms decrease compared to higher spatial resolution images. The estimated relative error of the superpixel-based MLRLS decreases by 1.26%–5.04%, with an average decrease of 2.33%. The estimated relative error of the block-based MLRLS decreases by 0.77%–4.23%, with an average decrease of 2.14%.
Although the lower spatial resolution makes the estimation accuracy of the superpixel-based MLRLS decreased slightly more than that of the block-based MLRLS, the estimation accuracy of the superpixel-based MLRLS in most cases is still higher than that of the block-based MLRLS.
B. Lower Spectral Resolution
Spectral subsampling is also performed on the HSI Pavia Centre to obtain a lower spectral resolution. The dataset is subsampled by 1:2 in the spectrum. The superpixel-based MLRLS and the block-based MLRLS are performed on the subsampled dataset. The estimated relative error is shown in
Table 7 and
Figure 13. This indicates that after spectral subsampling, the estimation errors of the two algorithms decrease compared to higher spectral resolution images. The estimated relative error of the superpixel-based MLRLS decreases by 0.14%–23.84% (except for that of the SD noise when SNR = 25dB,
), with an average decrease of 4.13%. The estimated relative error of the block-based MLRLS decreases by 0.43%–33.27%, with an average decrease of 8.14%.
Compared to the subsampling at a 1:4 spatial resolution, the subsampling at a 1:2 spectral resolution has a serious impact on the accuracy of noise estimation. This means that a high spectral correlation is necessary to ensure the accuracy of noise estimation, and a lower spectral resolution may lead to an unreliable result. The main reason for this is that the two algorithms are based on MLR, under the assumption of a high spectral correlation.
Although both the algorithms are sensitive to spectral resolution, the performance of the superpixel-based MLRLS is still better than that of the block-based MLRLS by 0.33%–13.39%.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}