Radiometric Comparison within the Sentinel-1 SAR Constellation over a Wide Backscatter Range


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Sentinel-1 SAR Data Products
2.2. Reference Targets
2.3. Deriving Radar Backscatter from Distributed and Point Targets
- the impulse response is interpolated to a subpixel resolution,
- the background clutter is properly estimated and subtracted.
3. Results
3.1. Point Target Evaluations
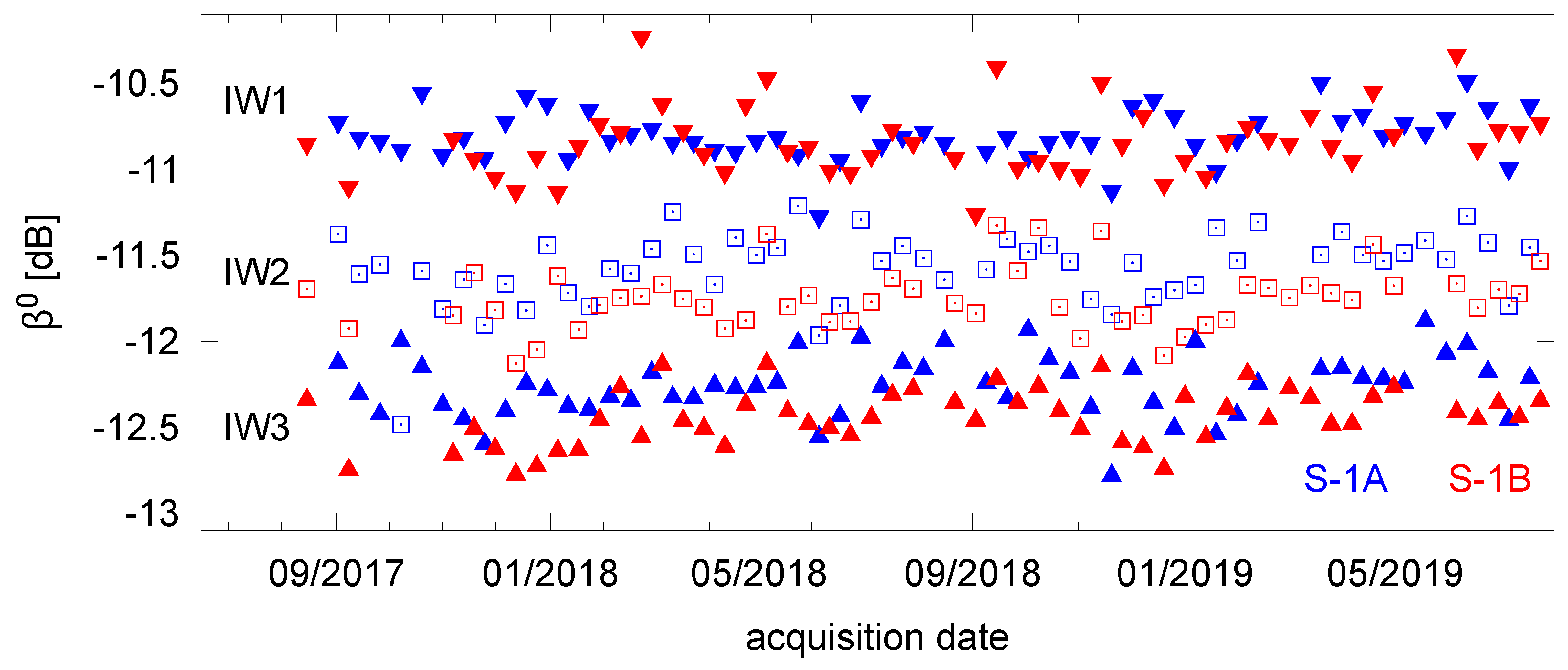
3.2. Medium Radar Backscatter Areas (Amazon Rainforest)
3.3. Transition to Lower Backscatterer (Greenland Region)
3.4. Very Low Radar Backscatter (Calm Water Region at Lake Constance)
3.5. Sensitivity of Noise Subtraction for Targets with Low SNR
4. Discussion
4.1. Long-Term Radiometric Stability
4.2. Radiometric Comparability between S-1A and S-1B over a Wide Backscatter Range
4.3. Noise Data Analysis from Calm Ocean Acquisitions
4.4. Comparing the SAR Transmit Antenna Pattern Using Transponder Recordings
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sandau, R.; Brieß, K.; D’Errico, M. Small satellites for global coverage: Potential and limits. ISPRS J. Photogramm. Remote Sens. 2010, 65, 492–504. [Google Scholar] [CrossRef]
- Milillo, P.; Riel, B.; Minchew, B.; Yun, S.; Simons, M.; Lundgren, P. On the Synergistic Use of SAR Constellations’ Data Exploitation for Earth Science and Natural Hazard Response. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 1095–1100. [Google Scholar] [CrossRef]
- Battagliere, M.L.; Virelli, M.; Lenti, F.; Lauretta, D.; Coletta, A. A Review of the Exploitation of the Operational Mission COSMO-SkyMed: Global Trends (2014-2017). Space Policy 2019, 48, 60–67. [Google Scholar] [CrossRef]
- Buckreuss, S.; Schättler, B.; Fritz, T.; Mittermayer, J.; Kahle, R.; Maurer, E.; Böer, J.; Bachmann, M.; Mrowka, F.; Schwarz, E.; et al. Ten Years of TerraSAR-X Operations. Remote Sens. 2018, 10, 873. [Google Scholar] [CrossRef] [Green Version]
- Gantert, S.; Kern, A.; Düring, R.; Janoth, J.; Petersen, L.; Herrmann, J. The future of X-band SAR: TerraSAR-X next generation and WorldSAR constellation. In Proceedings of the 2013 Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013; pp. 20–23. [Google Scholar]
- CSA News, published on 12th June 2019. Available online: https://www.canada.ca/en/space-agency/news/2019/06/canadas-next-generation-radarsat-satellite-constellation-successfully-launches-to-space.html (accessed on 6 March 2020).
- Wulder, M.A.; Hilker, T.; White, J.C.; Coops, N.C.; Masek, J.G.; Pflugmacher, D.; Crevier, Y. Virtual constellations for global terrestrial monitoring. Remote Sens. Environ. 2015, 170, 62–76. [Google Scholar] [CrossRef] [Green Version]
- Callegari, M.; Marin, C.; Notarnicola, C. Multi-temporal and multi-source alpine glacier cover classification. In Proceedings of the 2017 9th International Workshop on the Analysis of Multitemporal Remote Sensing Images (MultiTemp), Brugge, Belgium, 27–29 June 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A. Multistatic sar satellite formations: potentials and challenges. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 25–29 July 2005; Volume 4, pp. 2680–2684. [Google Scholar]
- Farquharson, G.; Woods, W.; Stringham, C.; Sankarambadi, N.; Riggi, L. The Capella Synthetic Aperture Radar Constellation. In Proceedings of the EUSAR 2018 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018. [Google Scholar]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Schwerdt, M.; Schmidt, K.; Tous Ramon, N.; Castellanos Alfonzo, G.; Döring, B.; Zink, M.; Prats, P. Independent Verification of the Sentinel-1A System Calibration. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 994–1007. [Google Scholar] [CrossRef] [Green Version]
- Schwerdt, M.; Schmidt, K.; Ramon, N.T.; Klenk, P.; Yague-Martinez, N.; Prats-Iraola, P.; Zink, M.; Geudtner, D. Independent System Calibration of Sentinel-1B. Remote Sens. 2017, 9, 511. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, K.; Tous Ramon, N.; Schwerdt, M. Radiometric Accuracy and Stability of Sentinel-1A Determined using Point Targets. Int. J. Microw. Wirel. Technol. 2018, 10, 538–546. [Google Scholar] [CrossRef] [Green Version]
- Reimann, J.; Schwerdt, M.; Schmidt, K.; Ramon, N.T.; Döring, B. The DLR Spaceborne SAR Calibration Center. Frequenz 2017, 71, 619–627. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H.; Hetzenecker, M.; Wuite, J.; Potin, P. The Sentinel-1 Mission: New Opportunities for Ice Sheet Observations. Remote Sens. 2015, 7, 9371–9389. [Google Scholar] [CrossRef] [Green Version]
- Garestier, F.; Dubois-Fernandez, P.C.; Papathanassiou, K.P. Pine Forest Height Inversion Using Single-Pass X-Band PolInSAR Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 59–68. [Google Scholar] [CrossRef]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N. Synergetic Use of Sentinel-1 and Sentinel-2 Data for Soil Moisture Mapping at 100 m Resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mouche, A.A.; Chapron, B.; Zhang, B.; Husson, R. Combined Co- and Cross-Polarized SAR Measurements Under Extreme Wind Conditions. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6746–6755. [Google Scholar] [CrossRef]
- Geudtner, D.; Torres, R.; Snoeij, P.; Davidson, M.; Rommen, B. Sentinel-1 system capabilities and applications. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 1457–1460. [Google Scholar]
- Schwerdt, M.; Brautigam, B.; Bachmann, M.; Döring, B.; Schrank, D.; Gonzalez, J.H. Final TerraSAR-X Calibration Results Based on Novel Efficient Methods. IEEE Trans. Geosci. Remote Sens. 2010, 48, 677–689. [Google Scholar] [CrossRef]
- Schwerdt, M.; Gonzalez, J.H.; Bachmann, M.; Schrank, D.; Schulz, C.; Döring, B. Monostatic calibration of both TanDEM-X satellites. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 2636–2639. [Google Scholar]
- Rudolf, D.; Raab, S.; Döring, B.J.; Jirousek, M.; Reimann, J.; Schwerdt, M. Absolute radiometric calibration of the novel DLR “Kalibri” transponder. In Proceedings of the 2015 German Microwave Conference, Nuremberg, Germany, 16–18 March 2015; pp. 323–326. [Google Scholar]
- Alfonzo, G.C.; Schwerdt, M.; Wollstadt, S.; Bachmann, M.; Döring, B.; Geudtner, D. First TerraSAR-X TOPS Mode Antenna Pattern Measurements Using Ground Receivers. Int. J. Antennas Propag. 2013, 2013. [Google Scholar] [CrossRef]
- Ulaby, F.; Dobson, M. Handbook of Radar Scattering Statistics for Terrain; Artech House: Norwood, MA, USA, 1989. [Google Scholar]
- Sentinel-1 Product Specification, S1-RS-MDA-52-7441, Issue 3.6. 2019. Available online: https://sentinel.esa.int/documents/247904/349449/Sentinel-1-Product-Specification.pdf (accessed on 6 March 2020).
- Radiometric Calibration of S-1 Level-1 Products Generated by the S-1 IPF, Ref: ESA-EOPG-CSCOP-TN-0002, Issue 1.0. 2015. Available online: https://sentinel.esa.int/documents/247904/685163/S1-Radiometric-Calibration-V1.0.pdf (accessed on 6 March 2020).
- Balss, U.; Breit, H.; Fritz, T. Noise-Related Radiometric Correction in the TerraSAR-X Multimode SAR Processor. IEEE Trans. Geosci. Remote Sens. 2010, 48, 741–750. [Google Scholar] [CrossRef]
- Recchia, A.; Giudici, D.; Piantanida, R.; Franceschi, N.; Monti-Guarnieri, A.; Miranda, N. On the Effective Usage of Sentinel-1 Noise Pulses for Denoising and RFI Identification. In Proceedings of the EUSAR 2018; 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018. [Google Scholar]
- Karvonen, J. Baltic Sea Ice Concentration Estimation Using SENTINEL-1 SAR and AMSR2 Microwave Radiometer Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2871–2883. [Google Scholar] [CrossRef]
- Park, J.; Korosov, A.A.; Babiker, M.; Sandven, S.; Won, J. Efficient Thermal Noise Removal for Sentinel-1 TOPSAR Cross-Polarization Channel. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1555–1565. [Google Scholar] [CrossRef]
- Thermal Denoising of Products Generated by the S-1 IPF, Ref: MPC-0392, DI-MPC-TN, Issue 1.1. 2017. Available online: https://sentinel.esa.int/documents/247904/2142675/Thermal-Denoising-of-Products-Generated-by-Sentinel-1-IPF (accessed on 6 March 2020).
- Rudolf, D.; Döring, B.; Jirousek, M.; Raab, S.; Reimann, J.; Schwerdt, M. Absolute radiometric calibration of C-band transponders with proven plausibility. In Proceedings of the EUSAR 2014 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014. [Google Scholar]
- Döring, B.; Reimann, J.; Raab, S.; Jirousek, M.; Rudolf, D.; Schwerdt, M. The three-transponder method: A novel method for accurate transponder RCS calibration. Prog. Electromagn. Res. 2014, 61, 297–315. [Google Scholar] [CrossRef] [Green Version]
- Ulander, L.M.; Hawkins, R.K.; Livingstone, C.E.; Lukowski, T. Absolute radiometric calibration of the CCRS SAR. IEEE Trans. Geosci. Remote Sens. 1991, 29, 922–933. [Google Scholar] [CrossRef]
- Gray, A.L.; Vachon, P.W.; Livingstone, C.E.; Lukowski, T.I. Synthetic aperture radar calibration using reference reflectors. IEEE Trans. Geosci. Remote Sens. 1990, 28, 374–383. [Google Scholar] [CrossRef]
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Rizzoli, P.; Martone, M.; Gonzalez, C.; Wecklich, C.; Tridon, D.B.; Bräutigam, B.; Bachmann, M.; Schulze, D.; Fritz, T.; Huber, M.; et al. Generation and performance assessment of the global TanDEM-X digital elevation model. ISPRS J. Photogramm. Remote Sens. 2017, 132, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools Version 6. Geochem. Geophys. Geosyst. 2019. [Google Scholar] [CrossRef] [Green Version]
- Miranda, N.; Meadows, P.; Piantanida, R.; Recchia, A.; Small, D.; Schubert, A.; Vincent, P.; Geudtner, D.; Navas-Traver, I.; Vega, F.C. The Sentinel-1 constellation mission performance. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 5541–5544. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarization | S-1A RCS [dB] | S-1B RCS [dB] | S-1A/S-1B |
|---|---|---|---|
| Channel | () | () | Difference [dB] |
| VV | −0.19 dB ± 0.21 dB | −0.11 dB ± 0.17 dB | −0.08 dB |
| VH | −0.03 dB ± 0.33 dB | −0.24 dB ± 0.26 dB | 0.21 dB |
| Target Center [lat,lon] | pol | S-1A [dB] | S-1B [dB] | S-1A/S-1B |
|---|---|---|---|---|
| @ Subswath | () | () | Difference [dB] | |
| 7.18 S, 66.61W | HH | −4.75 ± 0.18 | −4.92 ± 0.20 | 0.17 |
| IW1 | HV | −10.81 ± 0.15 | −10.86 ± 0.21 | 0.05 |
| 7.08 S, 65.76W | HH | −5.54 ± 0.21 | −5.87 ± 0.19 | 0.33 |
| IW2 | HV | −11.57 ± 0.21 | −11.75 ± 0.17 | 0.18 |
| 6.85 S, 65.02W | HH | −6.29 ± 0.19 | −6.73 ± 0.15 | 0.44 |
| IW3 | HV | −12.25 ± 0.18 | −12.43 ± 0.32 | 0.18 |
| Observation | Sub | S-1A [dB] | S-1B [dB] | S-1A/S-1B |
|---|---|---|---|---|
| Area Center | Swath | () | () | Difference [dB] |
| A: 72.62N, 33.70W | IW1 | −15.09 ± 0.05 | −15.12 ± 0.11 | 0.03 |
| B: 72.68N, 34.40W | IW1 | −16.12 ± 0.06 | −16.32 ± 0.09 | 0.20 |
| C: 72.83N, 34.92W | IW2 | −18.29 ± 0.13 | −18.90 ± 0.15 | 0.61 |
| D: 72.88N, 35.68W | IW2 | −20.77 ± 0.11 | −21.12 ± 0.10 | 0.35 |
| E: 73.01N, 38.32W | IW3 | −21.32 ± 0.05 | −21.72 ± 0.10 | 0.40 |
| S-1A | S1A | S-1B | S1B | S-1A/S-1B [dB] | S-1A/S-1B [dB] | |
|---|---|---|---|---|---|---|
| Subswath | [dB] | Noise | [dB] | Noise | Noise not | Noise |
| () | [dB] | () | [dB] | Subtracted | Subtracted | |
| IW1-VH | −20.12 ± 0.18 | −20.87 | −21.27 ± 0.25 | −22.12 | 1.15 | 0.65 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmidt, K.; Schwerdt, M.; Miranda, N.; Reimann, J. Radiometric Comparison within the Sentinel-1 SAR Constellation over a Wide Backscatter Range. Remote Sens. 2020, 12, 854. https://doi.org/10.3390/rs12050854
Schmidt K, Schwerdt M, Miranda N, Reimann J. Radiometric Comparison within the Sentinel-1 SAR Constellation over a Wide Backscatter Range. Remote Sensing. 2020; 12(5):854. https://doi.org/10.3390/rs12050854
Chicago/Turabian StyleSchmidt, Kersten, Marco Schwerdt, Nuno Miranda, and Jens Reimann. 2020. "Radiometric Comparison within the Sentinel-1 SAR Constellation over a Wide Backscatter Range" Remote Sensing 12, no. 5: 854. https://doi.org/10.3390/rs12050854