Fully Automated Countrywide Monitoring of Fuel Break Maintenance Operations

 , , , ,
, , , ,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Data
2.1.1. Portuguese Land Use and Land Cover Map
2.1.2. Study Sites
2.1.3. Imagery and Choice of Indices
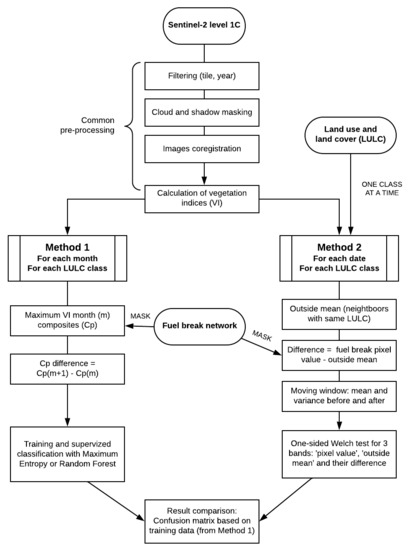
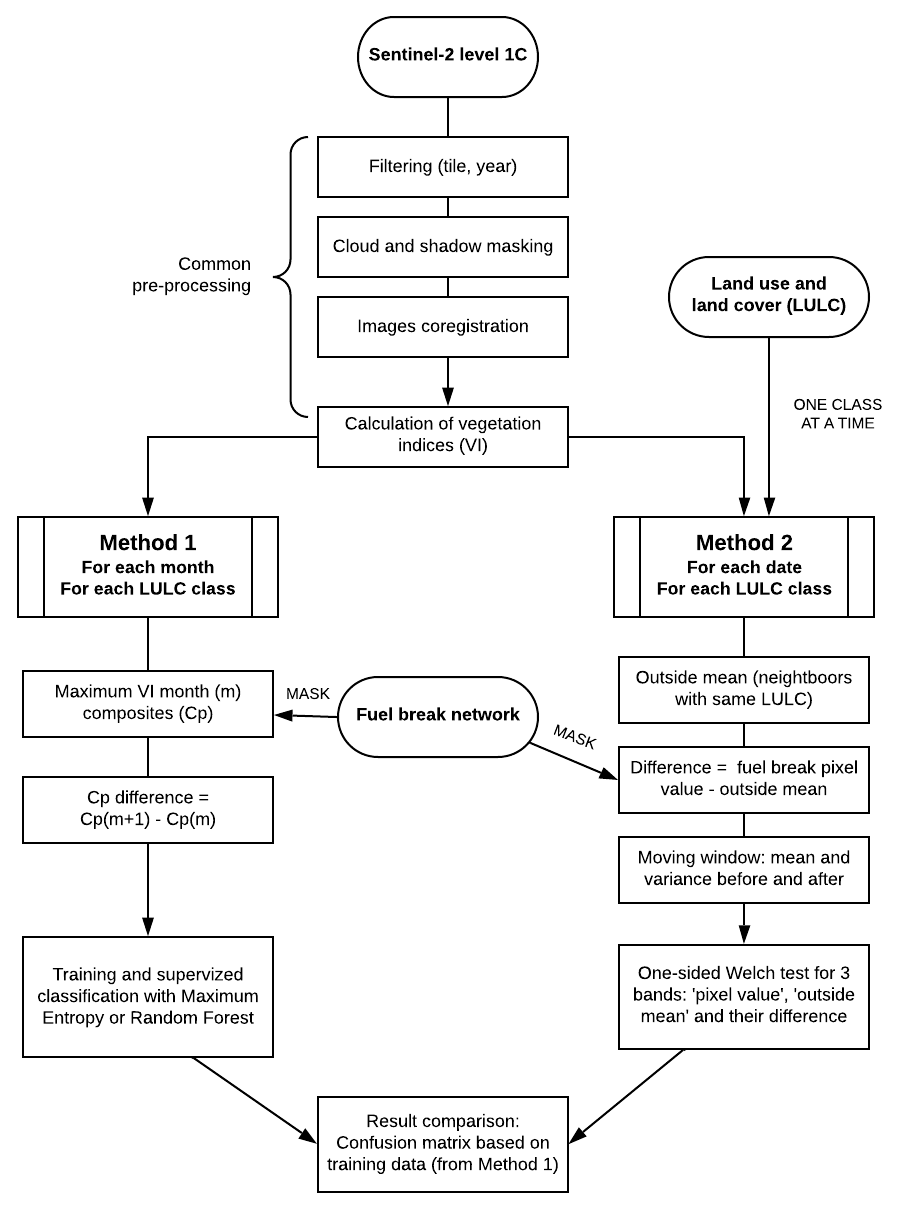
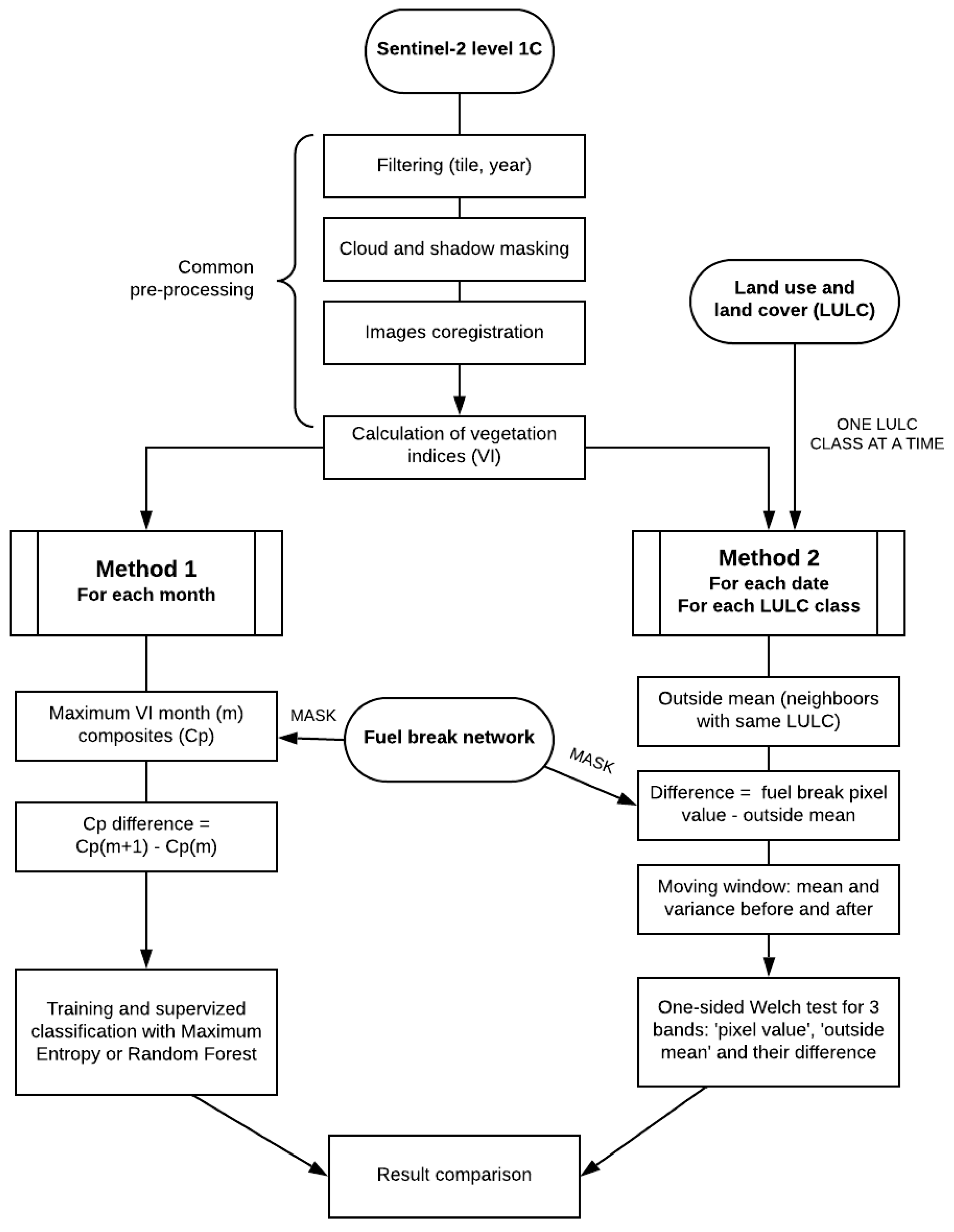
2.2. Two Methodologies for Fuel Break Monitoring
2.2.1. Common Preprocessing
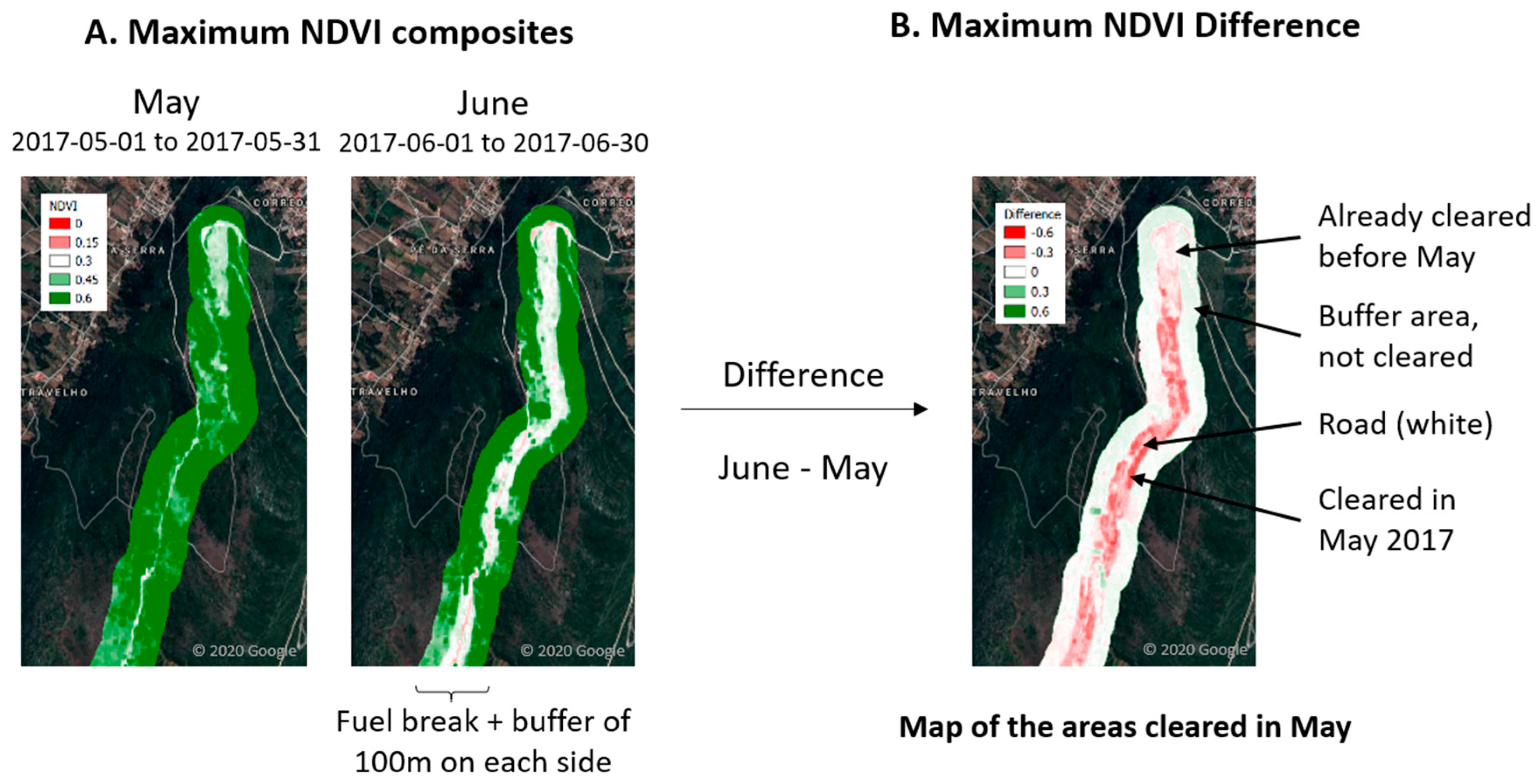
2.2.2. Method 1: Supervised Classification
2.2.3. Method 2: Time Series and Welch’s t-Test
2.3. Validation and Results’ Comparison
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shukla, P.R.; Skea, J.; Calvo Buendia, E.; Masson-Delmotte, V.; Pörtner, H.-O.; Roberts, D.C.; Zhai, P.; Slade, R.; Connors, S.; van Diemen, R.; et al. Climate Change and Land: An IPCC Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Greenhouse Gas Fluxes in Terrestrial Ecosystems; IPCC: Geneva, Switzerland, 2019. [Google Scholar]
- Camia, A.; Liberta, G.; San-Miguel-Ayanz, J. Modeling the Impacts of Climate Change on Forest Fire Danger in Europe; Joint Research Centre (European Commission): Brussels, Belgium, 2017. [Google Scholar] [CrossRef]
- San-Miguel-Ayanz, J.; Durrant, T.; Boca, R.; Libertà, G.; Branco, A.; De Rigo, D.; Ferrari, D.; Maianti, P.; Vivancos, T.A.; Oom, D.; et al. Forest Fires in Europe, Middle East and North Africa 2018; EUR 29856 EN; Publications Office of the European Union: Luxembourg, 2019; ISBN 978-92-76-11234-1. [Google Scholar] [CrossRef]
- Silva, J.M.N.; Moreno, M.V.; Le Page, Y.; Oom, D.; Bistinas, I.; Pereira, J.M.C. Spatiotemporal trends of area burnt in the Iberian Peninsula, 1975–2013. Reg. Environ. Chang. 2019, 19, 515–527. [Google Scholar] [CrossRef]
- Beighley, M.; Hyde, A.C. Portugal Wildfire Management in a New Era. Assessing Fire Risks, Resources and Reforms. 2018. Available online: https://www.isa.ulisboa.pt/files/cef/pub/articles/2018-04/2018_Portugal_Wildfire_Management_in_a_New_Era_Engish.pdf (accessed on 4 September 2020).
- Viedma, O.; Moity, N.; Moreno, J.M. Changes in landscape fire-hazard during the second half of the 20th century: Agriculture abandonment and the changing role of driving factors. Agric. Ecosyst. Environ. 2015, 207, 126–140. [Google Scholar] [CrossRef]
- Plano Nacional de Defesa da Floresta Contra Incêndios–ICNF. Available online: http://www2.icnf.pt/portal/florestas/dfci/planos/PNDFCI (accessed on 13 April 2020).
- Syphard, A.D.; Keeley, J.E.; Brennan, T.J. Factors affecting fuel break effectiveness in the control of large fires on the Los Padres National Forest, California. Int. J. Wildland Fire 2011, 20, 764–775. [Google Scholar] [CrossRef]
- Oliveira, T.M.; Barros, A.M.G.; Ager, A.A.; Fernandes, P.M. Assessing the effect of a fuel break network to reduce burnt area and wildfire risk transmission. Int. J. Wildland Fire 2016, 25, 619–632. [Google Scholar] [CrossRef]
- Ministério da Agricultura do Mar do Ambiente e do Ordenamento do Território. Divisão de Proteção Florestal e Valorização de Áreas Públicas (DPFVAP). Manual de Rede Primária; ICNF: Lisbon, Portugal, 2014. [Google Scholar]
- Ministério da Agricultura do Desenvolvimento Rural e das Pescas Decreto-Lei 124/2006, 2006-06-28. Available online: https://data.dre.pt/eli/dec-lei/124/2006/06/28/p/dre/pt/html (accessed on 1 May 2020).
- Tewkesbury, A.P.; Comber, A.J.; Tate, N.J.; Lamb, A.; Fisher, P.F. A critical synthesis of remotely sensed optical image change detection techniques. Remote Sens. Environ. 2015, 160, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Lu, D.; Li, G.; Moran, E. Current situation and needs of change detection techniques. Int. J. Image Data Fusion 2014, 5, 13–38. [Google Scholar] [CrossRef]
- Tarantino, C.; Adamo, M.; Lucas, R.; Blonda, P. Change detection in (semi-) natural grassland ecosystems for biodiversity monitoring using open data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 30 June 2018; pp. 8981–8984. [Google Scholar]
- Wang, Z.; Yao, W.; Tang, Q.; Liu, L.; Xiao, P.; Kong, X.; Zhang, P.; Shi, F.; Wang, Y. Continuous change detection of forest/grassland and cropland in the loess plateau of China using all available landsat data. Remote Sens. 2018, 10, 1775. [Google Scholar] [CrossRef] [Green Version]
- Kolecka, N.; Ginzler, C.; Pazur, R.; Price, B.; Verburg, P.H. Regional scale mapping of grassland mowing frequency with sentinel-2 time series. Remote Sens. 2018, 10, 1221. [Google Scholar] [CrossRef] [Green Version]
- Johansen, K.; Phinn, S.; Taylor, M. Mapping woody vegetation clearing in Queensland, Australia from Landsat imagery using the Google Earth Engine. Remote Sens. Appl. Soc. Environ. 2015, 1, 36–49. [Google Scholar] [CrossRef]
- Bekkema, M.E.; Eleveld, M. Mapping grassland management intensity using sentinel-2 satellite data. J. Geogr. Inf. Sci. 2018, 6, 194–213. [Google Scholar] [CrossRef]
- Pereira-Pires, J.E.; Aubard, V.; Ribeiro, R.A.; Fonseca, J.M.; Silva, J.M.N.; Mora, A. Semi-automatic methodology for fire break maintenance operations detection with sentinel-2 imagery and artificial neural network. Remote Sens. 2020, 12, 909. [Google Scholar] [CrossRef] [Green Version]
- European Space Agency (ESA). Sentinel-2 User Handbook; European Space Agency: Brussels, Belgium, 2015. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Direção-Geral do Território. Especificações técnicas da Carta de uso e Ocupação do Solo de Portugal Continental para 1995, 2007, 2010 e 2015. Relatório Técnico; Direção-Geral do Território: Lisbon, Portugal, 2018. [Google Scholar]
- Cerasoli, S.; e Silva, F.C.; Silva, J.M. Temporal dynamics of spectral bioindicators evidence biological and ecological differences among functional types in a cork oak open woodland. Int. J. Biometeorol. 2016, 60, 813–825. [Google Scholar] [CrossRef] [PubMed]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Guijarro, M.; Pajares, G. Real-time image processing for crop/weed discrimination in maize fields. Comput. Electron. Agric. 2011, 75, 337–346. [Google Scholar] [CrossRef] [Green Version]
- Sentinel Online. Level-2A Processing Overview–Sentinel-2 MSI–Technical Guide–Sentinel Online. Available online: https://earth.esa.int/web/sentinel/technical-guides/sentinel-2-msi/level-2a/algorithm (accessed on 13 April 2020).
- Google Earth Engine. Registering Images. Available online: https://developers.google.com/earth-engine/register?hl=fr (accessed on 13 April 2020).
- Holben, B.N. Characteristics of maximum-value composite images from temporal AVHRR data. Int. J. Remote Sens. 1986, 7, 1417–1434. [Google Scholar] [CrossRef]
- Google Earth Engine. Arrays and Array Images. Available online: https://developers.google.com/earth-engine/arrays_array_images?hl=fr (accessed on 13 April 2020).
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Elith, J.; Phillips, S.J.; Hastie, T.; Dudík, M.; Chee, Y.E.; Yates, C.J. A statistical explanation of MaxEnt for ecologists. Divers. Distrib. 2011, 17, 43–57. [Google Scholar] [CrossRef]
- Campagnolo, M.L.; Oom, D.; Padilla, M.; Pereira, J.M.C. A patch-based algorithm for global and daily burned area mapping. Remote Sens. Environ. 2019, 232. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Original Class Number | Details | Area (ha) | Relative Area (%) |
|---|---|---|---|---|
| Artificialized lands | 1. | Continuous and discontinuous urban fabric, industries, parks, airports, historical areas, leisure infrastructures and golf fields. | 1747 | 3.6 |
| Agriculture | 2. | Permanent and temporary agriculture fields, some with natural areas, including orchards, olive groves and vineyards. | 5497 | 11.4 |
| Forest | 3.1. | Mainly cork oaks, holm oaks, eucalyptus, stone pine and maritime pine. | 24,017 | 49.7 |
| Agroforestry | 2.4.4. | Oaks or pines agroforestry systems. | 663 | 1.4 |
| Shrublands | 3.2.2. | 13,621 | 28.2 | |
| Herbaceous vegetation | 2.3. and 3.2.1. | Permanent pasture and natural herbaceous | 1869 | 3.9 |
| Sparse vegetation | 3.3. | 787 | 1.6 | |
| Water | 4. and 5. | Inland water and wetlands | 145 | 0.3 |
| Total | 48,346 | 100 |
| Study Area | Years | Area (ha) | Forest (%) | Shrubs (%) | P (mm) * | maxT (°C) * |
|---|---|---|---|---|---|---|
| Serra de Caldeirão | 2016–2017 | 205.2 | 58.7 | 40 | 800 | 19 |
| Manteigas | 2016–2017 | 204.6 | 31 | 42.2 | 1400 | 14 |
| Serra de Candeeiros | 2017–2018 | 398.6 | 20.9 | 61.9 | 1200 | 18 |
| Amarante | 2018–2019 | 97.6 | 90.3 | 8.3 | 1600 | 16 |
| Proença-a-Nova | 2018–2019 | 202 | 79.2 | 19.2 | 1100 | 20 |
| Total | 2016–2019 | 1108 | 46.5 | 41.7 |
| Classifier and Index | MaxEnt NDVI | MaxEnt MExG | RF NDVI | RF MExG | |||||
|---|---|---|---|---|---|---|---|---|---|
| Fuel treatment detected | Yes | No | Yes | No | Yes | No | Yes | No | |
| Annual | Precision (%) | 54 | 87 | 35 | 95 | 43 | 87 | 33 | 92 |
| Recall (%) | 69 | 78 | 96 | 32 | 73 | 64 | 94 | 29 | |
| F1-Score (%) | 61 | 82 | 51 | 48 | 54 | 74 | 49 | 44 | |
| Overall accuracy (%) | 75 | 50 | 66 | 46 | |||||
| Monthly | Precision (%) | 38 | 99 | 8 | 99 | 25 | 99 | 11 | 99 |
| Recall (%) | 56 | 98 | 83 | 78 | 55 | 96 | 63 | 87 | |
| F1-Score (%) | 45 | 98 | 15 | 88 | 35 | 98 | 18 | 93 | |
| Overall accuracy (%) | 97 | 79 | 95 | 87 | |||||
| Vegetation index and Level of significance | NDVI 0.05 | NDVI 0.005 | NDVI 0.0005 | MExG 0.05 | MExG 0.005 | MExG 0.0005 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fuel treatment detected | Yes | No | Yes | No | Yes | No | Yes | No | Yes | No | Yes | No | |
| Annual | Precision (%) | 37 | 87 | 56 | 83 | 74 | 80 | 35 | 83 | 50 | 83 | 66 | 82 |
| Recall (%) | 80 | 50 | 57 | 83 | 40 | 95 | 77 | 45 | 60 | 76 | 47 | 91 | |
| F1-Score (%) | 51 | 63 | 57 | 83 | 52 | 87 | 48 | 59 | 54 | 79 | 55 | 86 | |
| Overall accuracy (%) | 58 | 76 | 79 | 54 | 72 | 79 | |||||||
| Monthly | Precision (%) | 10 | 98 | 26 | 98 | 52 | 98 | 10 | 98 | 27 | 98 | 45 | 98 |
| Recall (%) | 21 | 96 | 27 | 98 | 28 | 99 | 23 | 95 | 33 | 98 | 32 | 99 | |
| F1-Score (%) | 13 | 97 | 27 | 98 | 37 | 99 | 14 | 97 | 30 | 98 | 37 | 99 | |
| Overall accuracy (%) | 94 | 97 | 98 | 94 | 96 | 98 | |||||||
| Land cover and Method | Forest M1 | Forest NDVI | Forest MExG | Shrubs M1 | Shrubs NDVI | Shrubs MExG | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fuel treatment detected | Yes | No | Yes | No | Yes | No | Yes | No | Yes | No | Yes | No | |
| Annual | Precision (%) | 45 | 90 | 69 | 88 | 57 | 89 | 60 | 84 | 83 | 78 | 78 | 80 |
| Recall (%) | 62 | 82 | 43 | 95 | 51 | 91 | 71 | 76 | 47 | 95 | 55 | 92 | |
| F1-Score (%) | 52 | 86 | 53 | 91 | 54 | 90 | 65 | 80 | 60 | 86 | 6f4 | 86 | |
| Overall accuracy (%) | 78 | 85 | 83 | 75 | 79 | 80 | |||||||
| Monthly | Precision (%) | 34 | 99 | 54 | 99 | 41 | 99 | 47 | 99 | 58 | 98 | 53 | 98 |
| Recall (%) | 52 | 98 | 33 | 100 | 37 | 99 | 62 | 98 | 33 | 99 | 37 | 99 | |
| F1-Score (%) | 41 | 99 | 41 | 99 | 38 | 99 | 53 | 98 | 42 | 99 | 44 | 99 | |
| Overall accuracy (%) | 98 | 98 | 98 | 97 | 97 | 97 | |||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aubard, V.; Pereira-Pires, J.E.; Campagnolo, M.L.; Pereira, J.M.C.; Mora, A.; Silva, J.M.N. Fully Automated Countrywide Monitoring of Fuel Break Maintenance Operations. Remote Sens. 2020, 12, 2879. https://doi.org/10.3390/rs12182879
Aubard V, Pereira-Pires JE, Campagnolo ML, Pereira JMC, Mora A, Silva JMN. Fully Automated Countrywide Monitoring of Fuel Break Maintenance Operations. Remote Sensing. 2020; 12(18):2879. https://doi.org/10.3390/rs12182879
Chicago/Turabian StyleAubard, Valentine, João E. Pereira-Pires, Manuel L. Campagnolo, José M. C. Pereira, André Mora, and João M. N. Silva. 2020. "Fully Automated Countrywide Monitoring of Fuel Break Maintenance Operations" Remote Sensing 12, no. 18: 2879. https://doi.org/10.3390/rs12182879