1. Introduction
Global navigation satellite systems (GNSS) technology has been widely researched and applied to many engineering applications, such as vehicle navigation, personal positioning, and mobile surveying. For centimeter-level demanding applications, the high-precision carrier phase observations-based real-time kinematic (RTK) positioning is attractive, which relies on a set of correctly fixed integer ambiguities [
1]. In open-sky and short baseline conditions, a dual-frequency global positioning system (GPS) RTK technique can achieve rapid, even instantaneous, ambiguity resolution (AR) with a high success rate [
2]. However, when it comes to single-frequency RTK for low-cost GPS receivers, particularly for single-epoch kinematic positioning, there is a low success rate for AR. Along with the rapid development of the Chinese BeiDou navigation satellite system (BDS), combining the observations of GPS and BDS improves the single-frequency single-epoch AR performance significantly [
3].
The GNSS-only configuration may not provide continuous and reliable solutions in adverse circumstances due to the frequent signal blockages and multipath effects, even with the combined GPS and BDS constellations. Attracted by the reduced size and low-cost inertial navigation system (INS) using micro-electro-mechanical sensors (MEMS) technology, integrating the low-cost inertial sensors with a single-frequency receiver has broad application prospects in the civil market [
4]. For GNSS RTK/INS integration is required reliable ambiguity resolution: incorrect ambiguities can cause position errors as well as sensor biases divergent and failed ambiguity resolution reduces availability.
In order to aid the AR with inertial sensors, the tightly coupled Kalman filter (TCKF) mechanization is commonly adopted, which is carried out in the raw measurements domain. To handle the ambiguity problem in GNSS/INS integration, two approaches can be used, i.e., using carrier-smoothing-code filtering (CSCF) and performing integer AR. These two techniques are also usually chosen by GNSS-only users [
5]. For carrier-smoothing-code filtering, the epoch-differenced carrier phases and the code pseudoranges are simultaneously considered [
6]. Although the ambiguities are canceled by epoch difference operations, the limitations of CSCF are that cycle slips should be absent or repaired in advance and the filter state estimates are essentially the delayed ones when considering the correlation between process and measurement noises [
7]. For the integer AR technique, the AR process in the TCKF is usually resolved in two steps. The first step is to solve the real-valued ambiguities and its variance-covariance matrix through least squares or the Kalman filter. Then, the second step tries to fix the real-valued ambiguities with a chosen integer least-squares estimate. For the single-epoch AR mode, if the ambiguities can be correctly fixed during the test period, the centimeter-level and real-time positioning results will be maintained [
8]. In this paper, the integer AR technique is taken care of.
Biases in satellite observations or inertial measurement unit (IMU) measurements will inevitably hamper the AR performance or result in incorrectly fixed ambiguities. For the observation-related biases, which may come from residual atmospheric error, large multipath error, and abnormal observation noise, the corresponding methods to relieve or delete the bias effects in the AR process have been extensively researched and can be categorized as the following three kinds: (i) the innovation-based reweighting method, also called the robust estimation method, which uses an innovation-based inflating factor to downscale the weight of the observation matrix [
9,
10,
11]. In this way, the effect of biased observations on float ambiguity will be reduced so as to improve the precision of the float ambiguity solution. (ii) There is the partial ambiguity resolution (PAR) strategy, which uses a predetermined subset ambiguities chosen strategy to fix an ambiguity subset with a high success rate. The subset ambiguities could be chosen based on the successively increased elevations [
12], the bias-affected success rate [
13], the maximum rounding fixing rate ordering method [
4], and so on. The PAR strategy is beneficial to the availability of positioning results, even with the degraded position accuracy due to fewer observations. This situation will have less of an effect especially when using multiple GNSS constellations with many satellites visible [
14,
15]. (iii) There is the receiver autonomous integrity monitoring (RAIM) method, which can directly delete the biased observations by outlier identification, reliability testing, and isolation steps [
16]. If all biased observations are identified and isolated, pure observations can be used for subsequent steps.
For biased measurements (outliers or gross errors) from inertial sensors, the INS predictions from integral operation in INS mechanization will be affected. Outliers in IMU measurements occasionally occur when the carrier of an IMU is traveling along a bumpy road or passing through a deceleration strip in an urban environment. The sudden bump will affect the outputs of the accelerometer triple and may affect the outputs of the gyroscope triple due to the fact that an IMU is often not firmly fixed on a carrier. Therefore, how to alleviate the negative effects of abnormal predictions on the AR and the final filter solutions are our main focus in this work.
With biased IMU measurements, abnormal predicted residuals (innovations) will be found during the AR process in the TCKF. In this case, the adaptive estimation method could be used to give less weight to the variance-covariance matrix of the predicted states and reduce the negative effect of the predicted position in estimating the float ambiguities [
17,
18]. The RAIM method could also be adopted to resist the abnormal dynamic predictions as shown in [
19], which use an extended RAIM (eRAIM) procedure to detect faults in predictions. The eRAIM procedures are executed within the framework of the Gauss–Markov model, where the observation vector is combined by the actual observations and the predicted system states. Then, least-squares estimation is adopted and the abnormal predictions can be judged according to residual testing. The above observation vector is similar to the combined observation vector used in the AR process of the TCKF, where the virtual observations that are the components of the combined observation vector consist of the predicted position components. However, both the adaptive estimation and RAIM methods could be marginally helpful for successful AR. This is because either down-weighting the variance-covariance matrix of states or deleting the corresponding abnormal state components means the reduction of redundant information in estimating the reliable float ambiguity estimates. Even if the ambiguities are fixed by using the above two methods, biased predictions will also influence the final TCKF states due to the fact that the final states are obtained by subtracting the estimated state errors from the approximates (i.e., the biased predicted states). Since subdecimeter-level predicted position is needed for successful AR in GNSS/INS integration, one should maintain the prediction accuracy and minimize the impact of biased predictions at the same time. From this point of view, a multiple model adaptive estimation method could be considered, which originates from tracking applications [
20] and has been extended to multi-sensor integration [
21,
22,
23]. The multiple model approach shares the same observation model but assumes that the system obeys one of a finite number of dynamic models. The final solution of multiple model adaptive estimation is the fusion of all Kalman filter solutions with respect to each dynamic model and with the corresponding transition probabilities as weights. It is unquestionable that the computational expenses will increase linearly with the number of dynamic models. Moreover, the motion behavior of one epoch should be uniquely specified by a reasonable dynamic model rather than a fused model with empirical weights.
To ensure the optimization of the Kalman filter when the system experiences unexpected dynamic conditions, a dynamic model that is able to adapt to a wide range of dynamic conditions should be guaranteed [
24]. In [
25], a positional polynomial fitting (PPF) approach with model orders from 1 to 4 was used to construct the dynamic models. Furthermore, in [
26], a model evaluation criterion was derived to choose a reliable dynamic model from a series of candidate models with different model orders in the given time window. As has been pointed out by [
25,
26], an object’s motion could be characterized by a low-order polynomial constructed by the positions of multiple successive historical epochs in a given time window. Therefore, in [
27], the PPF approach with a model order of 2 was used for single-frequency GNSS cycle slip estimation, and the estimation of cycle slips can be significantly improved compared with that from two traditional methods, i.e., measurement-based polynomial fitting and triple-differenced (TD) residual-based snooping. A main advantage of the constructed positional polynomial is that it does not depend on external measurements; it requires only that the positions within the time window are all available. However, the methods in [
25,
26,
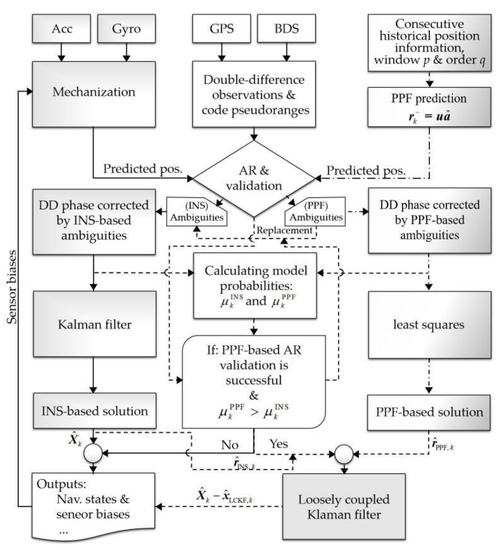
27] were only proposed to enhance the performance of the GNSS. For GNSS and INS integration, the INS predictions may be affected by gross errors existing in the IMU measurements. Thus, using PPF as an auxiliary model to aid the inertial dynamic model may improve the performance of GNSS/INS integration due to their complementary characteristics. Hence, when abnormal INS predictions are detected, one can use the position predicted by the constructed polynomial fitting model as an alternative. In this paper, we propose a PPF-aided GPS/BDS RTK and INS integration method to estimate the navigation solution in order to achieve continuous and reliable solutions for both ambiguities and positioning performance. We also propose the use of the model probabilities for both the INS and PPF models together with the ambiguity fixing state to detect an epoch with abnormal predictions. The PPF will be triggered once an epoch with abnormal predictions is detected. Furthermore, the full ambiguity resolution (FAR) and PAR strategies are respectively embedded into the proposed method while fixing the float ambiguities.
The typical characteristics of the proposed method when comparing with some existing methods in the domain of GNSS and INS integration are threefold: (i) with the aid of the predicted position from PPF, the proposed method has the ability to resist the abnormal predictions from INS. These abnormal predictions cannot be handled by the commonly used GNSS/INS integrated methods, e.g., [
4,
11], where no constraints on dynamic model error were introduced. (ii) The adaptive estimation and RAIM methods for GPS/INS integration as presented in [
18,
19], respectively, could alleviate the impact of abnormal INS predictions. However, these two kinds of methods cannot make full use of the a priori predicted information by down-weighting the variance-covariance matrix of states and deleting the corresponding abnormal state components. The proposed method uses PPF to compensate for the epochs with abnormal INS predictions, which will retain all the useful information from the INS predictions. (iii) Theoretically, the multiple model approaches [
20,
21,
22,
23] could achieve consistent results compared with the proposed method since one can incorporate all possible dynamic models, which will characterize the motion behavior of an object into the alternative dynamic models. However, the multiple model methods require nearly linear computation time as a function of the number of models. We should note that only code observations were considered in the existing methods mentioned in this paragraph. The effectiveness of these methods when considering the phase observations still needs further study.
The remainder of this paper is organized as follows: in
Section 2, methods for a single-frequency GPS/BDS/INS tightly coupled Kalman filter, the construction of a positional polynomial motion constraint, and the proposed PPF-aided GPS/BDS RTK and INS integration are presented. The experimental results are presented and discussed in
Section 3 and
Section 4, respectively. Finally, in
Section 5, the conclusions are summarized.
3. Results
3.1. Field Test Description
A vehicular test was carried out to evaluate the performance of the developed FFP-aided GPS/BDS RTK and INS tightly coupled method in an urban environment (see
Figure 2). Seventy minutes of rover station data with 100 Hz INS data and 1 Hz dual-frequency GPS/BDS data were collected by a NovAtel SPAN-CPT system and a high-grade geodetic GNSS dual-frequency receiver on 19 September 2014. Another same receiver mounted on the roof of a tall building was set up as the reference station. The baseline length of the whole experiment was less than 5 km. The test covered the typical area characterized by foliage, a sub-dense urban canyon, a lake, and an open-sky condition. Hence, the satellite positioning performance was limited because of signal blocking and multipath problems. In this test, the single-frequency GPS/BDS (GPS L1 and BDS B1 phase and code observations) and INS data were processed to validate the proposed method using a single-epoch mode, while the dual-frequency ambiguity-fixed GPS/BDS RTK and INS solution was processed for reference. For evaluating the ambiguity, one can compare the position components of the proposed method with the counterparts of the reference trajectory through a predefined threshold to judge whether the corresponding ambiguities are correct or incorrect fixing. The threshold used in this paper was 0.05 m for three position components.
From
Figure 2b, it can be seen that the number of visible satellites of BDS was marginally larger than that of the GPS counterparts during the whole test. From the perspective of position dilution of precision (PDOP) values, however, the PDOPs of BDS are larger than those of the GPS ones, which is due to the current deficiency of the BDS geometry configuration. By combining GPS with BDS, the number of visible satellites is doubled compared with in the GNSS-only system. The PDOPs are significantly improved for the combined GPS and BDS constellation.
Figure 2c,d show the velocities in the navigation frame and the vehicle attitudes. It can be seen that the vehicle was moving in a moderate dynamic.
During the test, the standard deviation
at zenith was empirically set to 3 mm and 0.3 m for the phase and code observations, respectively, and the cutoff elevation was set to 15°. The specifications of the inertial sensor are listed in
Table 1.
3.2. Positional Polynomial Fitting Performance by Simulated Vehicle Trajectories
In order to aid the ambiguity fixing so as to obtain continuous and highly reliable navigation solutions, the necessity of subdecimeter-precision-predicted positions for reliable ambiguity resolution should be confirmed by positional polynomial fitting. In this subsection, both the fitting errors and prediction errors of PPF are presented. For the fitting errors, it is calculated by the mean value of the differences between the fitted position coordinates of Equation (16) and the corresponding truth position coordinates within the time window. The prediction errors indicate the difference between the predicted position of Equation (18) and the truth position of epoch k.
How to select the time window
p and model order
q was studied in [
25,
26]. It was pointed out that the motion of a vehicle often obeys a low-order polynomial over a short period [
27]. Therefore, in this subsection, we chose two sets of polynomial fitting model characterized by
p = 4,
q = 2 and
p = 5,
q = 3 to build the kinematic model of PPF, respectively. A straight line vehicle trajectory with variable accelerated motion similar to [
27] and a combined straight and curved vehicle trajectory with accelerated and decelerated motion were simulated. All the position coordinates were expressed in the earth frame and then transformed to the navigation frame to show the vehicle trajectories in
Figure 3.
As seen from
Figure 3, the vehicle is simulated to move with a moderate velocity in these two cases, to try to match the actual motion in an urban environment. The description of the straight line vehicle trajectory with variable accelerated motion is separated into the following nine scenarios:
S1 (1–100 s): stationary;
S2 (101–110 s): accelerated motion with 0.8 m/s2 in z-axis components;
S3 (110–210 s): uniform motion with velocity 8 m/s in z-axis components;
S4 (211–220 s): variable accelerated motion with 0.1 m/s3 in z-axis components;
S5 (221–320 s): uniform motion with velocity 13.5 m/s in z-axis components;
S6 (321–330 s): variable accelerated motion with −0.1 m/s3 in z-axis components;
S7 (331–430 s): uniform motion with velocity 13.5 m/s in z-axis components;
S8 (431–440 s): decelerated motion with velocity −0.8 m/s2 in z-axis components;
S9 (441–540 s): stationary.
The description of the combined straight and curved vehicle trajectory with accelerated and decelerated motion is separated into the following nine scenarios:
S1 (1–50 s): stationary;
S2 (51–60 s): accelerated motion with 1 m/s2 in z-axis components;
S3 (61–110 s): uniform motion with the velocity at the end of S2;
S4 (111–155 s): left turning motion with slightly changed velocities;
S5 (156–205 s): uniform motion with the velocity at the end of S4;
S6 (206–255 s): circle motion with slightly changed velocities;
S7 (256–405 s): uniform motion with velocity at the end of S6;
S8 (406–410s): decelerated motion with velocity −2 m/s2 in z-axis components;
S9 (411–460s): stationary.
The fitting and prediction errors of the two vehicle trajectory using PPF with different model orders and time windows are shown in
Figure 4 and
Figure 5. The position coordinates within the time window are simulated as a normal distribution with a zero mean and a standard deviation of 0.01 m. The sampling interval of the position was set to 1 s.
3.3. Full Ambiguity Resolution and Positioning Performance
In terms of the different satellite system combinations, the INS-based solutions, in this paper, can be classified into the following three schemes: GPS/INS, BDS/INS, and GPS/BDS/INS. Furthermore, if the PPF method is considered, the PPF-aided INS-based solutions can also be classified as GPS/INS-PPF, BDS/INS-PPF, and GPS/BDS/INS-PPF schemes. In this subsection, the RTK/INS solutions of different system combinations with or without PPF aiding, together with the GNSS-only solutions with or without PPF aiding, are estimated using a single-frequency single-epoch FAR strategy. The GNSS-only solutions with PPF aiding could be regarded as the application of the method of [
25] in integrated navigation with phase observations. Other methods that could be used to handle the abnormal predictions from the dynamic system—such as the adaptive estimation method [
18], RAIM method [
19], and multiple model method [
23]—are not considered here for numerical analyses due to their shortcomings as summarized in
Section 1.
Table 2 lists the number of epochs with fully and incorrectly fixed ambiguities and their fixing and incorrect fixing rates.
In
Table 2, the fixing rate (
) and incorrect fixing rate (
) are defined by:
It should be noted that the number of epochs with fixed ambiguities mentioned here indicates the number of epochs for which the full set of ambiguities is fixed to their integers. This is used to distinguish the number of epochs with partially fixed ambiguities mentioned in the next subsection, which indicates the number of epochs for which only a subset of ambiguities is fixed to integers.
To further investigate the effectiveness of the schemes with the PPF-aided method, an error with a size of 0.05 g was added to the output of the accelerometer
z-axis at GPS time 460,270 s. The position errors and ambiguity fixing states around this epoch are shown in
Figure 6.
Figure 7 shows the model probabilities calculated by the three PPF-based schemes.
Furthermore, another experiment was performed where errors with a size of 0.05 g were added to each output of the accelerometer axes at GPS time 460,270 s. The position errors, ambiguity fixing states, and model probabilities are presented in
Figure 8 and
Figure 9.
3.4. Partial Ambiguity Resolution and Positioning Performance
To further improve the ambiguity fixing rate so as to achieve continuous high-precision positioning results, the partial ambiguity resolution (PAR) strategy is added to the ambiguity fixing processes of INS-based AR and PPF-based AR. The PAR used in this paper is conducted in an iterative way, which uses an already-fixed subset of ambiguities as precise ranges to resolve the remaining unfixed ambiguities until all the ambiguities are fixed or there are no more ambiguities that can be fixed.
The vital step for PAR is the selection of an ambiguity subset that can be reliably fixed. In this paper, we chose the commonly used strategy to determine the subset of ambiguities by successively increased elevations. The PAR is only activated if the full ambiguity resolution fails. If FAR fails, the cutoff elevation is then increased by 5°. Therefore, the subset of ambiguities is chosen based on the new cutoff elevation threshold. The LAMBDA method is used to try to fix the subset ambiguities to their integers. If the fixed ambiguity subset does not pass the ratio test and the success rate is lower than the predefined value, this procedure is repeated until a selected ambiguity subset that can be successfully fixed or is empty is obtained. If the fixed ambiguity subset passes the ratio test and the success rate fulfills the predefined value, we think that the subset ambiguities are correctly fixed. Then, the ambiguity-fixed carrier phase observations can be used as precise ranges and aid the fixing of the remaining ambiguities. If none of the ambiguities can be fixed, only the code observations are used and the float solution of the state vector is achieved. The ratio test value and the success rate for PAR are set to 3 and 0.99, respectively.
Table 3 lists the single-frequency single-epoch ambiguity fixing states of each scheme using PAR. To demonstrate a clear effect of PPF in aiding GNSS/INS solutions by using PAR, in this subsection, only the integrated solutions are considered. In
Table 3, an additional column containing the number of epochs with partially fixed ambiguities and the partial fixing rate is presented, compared with
Table 2. The partial fixing rate (
) is computed as:
In order to manifest the advantage of the proposed PPF-aided method, errors with a size of 0.05 g were added to each output of the accelerometer axes at GPS time 460,270 s in the same way as in the second simulation in
Section 3.2. The position errors and ambiguity fixing states around GPS time 460,270 s estimated by the schemes using PAR are shown in
Figure 10. The corresponding model probabilities calculated by the schemes with the PPF-aided method using PAR are shown in
Figure 11.
To give an overall comparison of the number of ambiguities fixed by PAR and FAR, the ratio of the number of ambiguities (
) fixed by PAR with respect to those fixed by FAR is defined as:
The
results corresponding to the integrated solutions are shown in
Figure 12.
Finally, in
Figure 13,
Figure 14 and
Figure 15, the performance of each PPF-based scheme using PAR is evaluated by analyzing the positioning errors and the number of fixed DD ambiguities.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}