LiDAR/RISS/GNSS Dynamic Integration for Land Vehicle Robust Positioning in Challenging GNSS Environments





Abstract
:1. Introduction
- Design and implementation of denoising method for the raw LiDAR point cloud to remove any outliers, thus reducing the computational complexity and enhancing the performance.
- Utilization of the Iterative Closest Point (ICP) algorithm to register the LiDAR point clouds and minimize the root-mean-squared error between two consecutive point clouds.
- Realization of an Extended Kalman Filter (EKF) to fuse the positioning information from GNSS, INS, and LiDAR and improve the overall positioning solution.
- Design and implementation of a selection criterion that can automatically select the set of sensors/systems to be included in the fusion filter to mitigate the drift in the positioning solution.
- The performance of the proposed system is assessed based on road test experiments to quantitively assess its merits and limitations when compared to a high-end reference solution.
2. System Architecture and Mathematical Model
2.1. Three-Dimensional Reduced Inertial Sensor System (3D-RISS)
2.2. LiDAR Odometry
2.2.1. Ego Points Removal
2.2.2. Segmentation of the Ground Points from the Point Cloud
2.2.3. LiDAR Point Cloud Clustering
2.2.4. Point Cloud Denoising
2.2.5. Point Cloud Downsampling
2.2.6. Iterative Closest Point (ICP)
2.3. LiDAR/RISS/GNSS Integration
Switching Criterion
3. Experimental System Setup
4. Results and Discussion
4.1. Road Trajectories
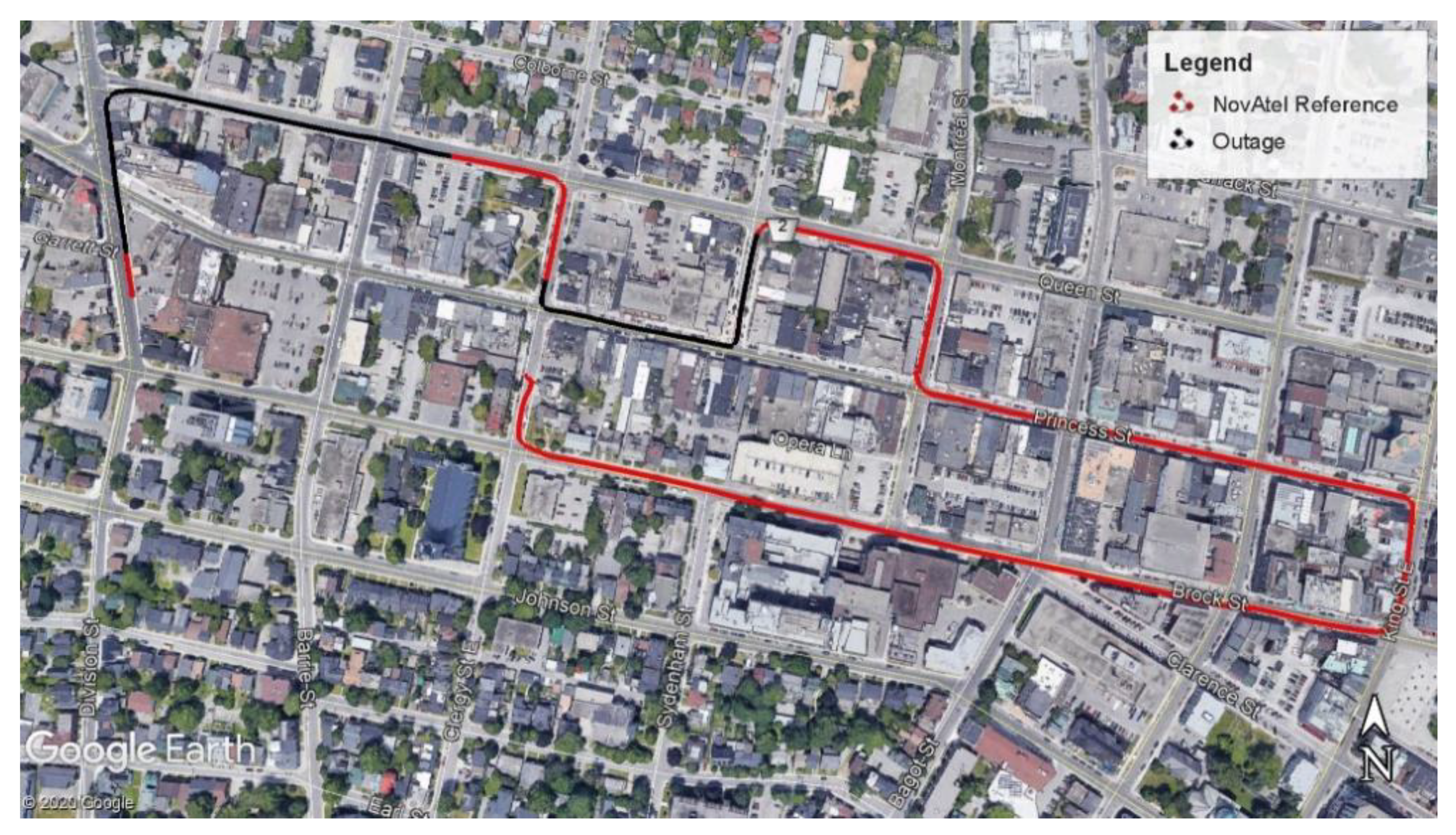
4.1.1. First Road Trajectory
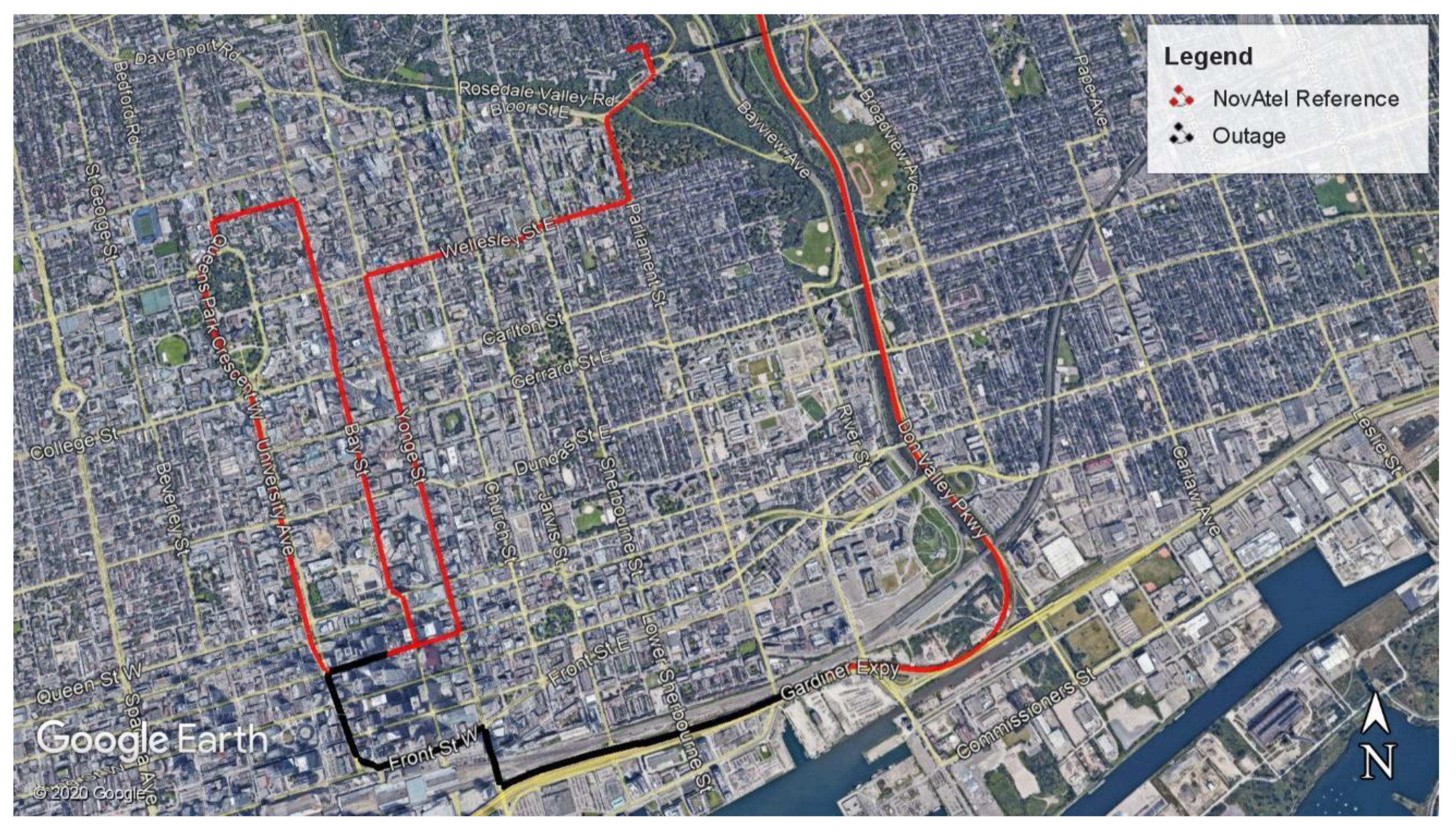
4.1.2. Second Road Trajectory
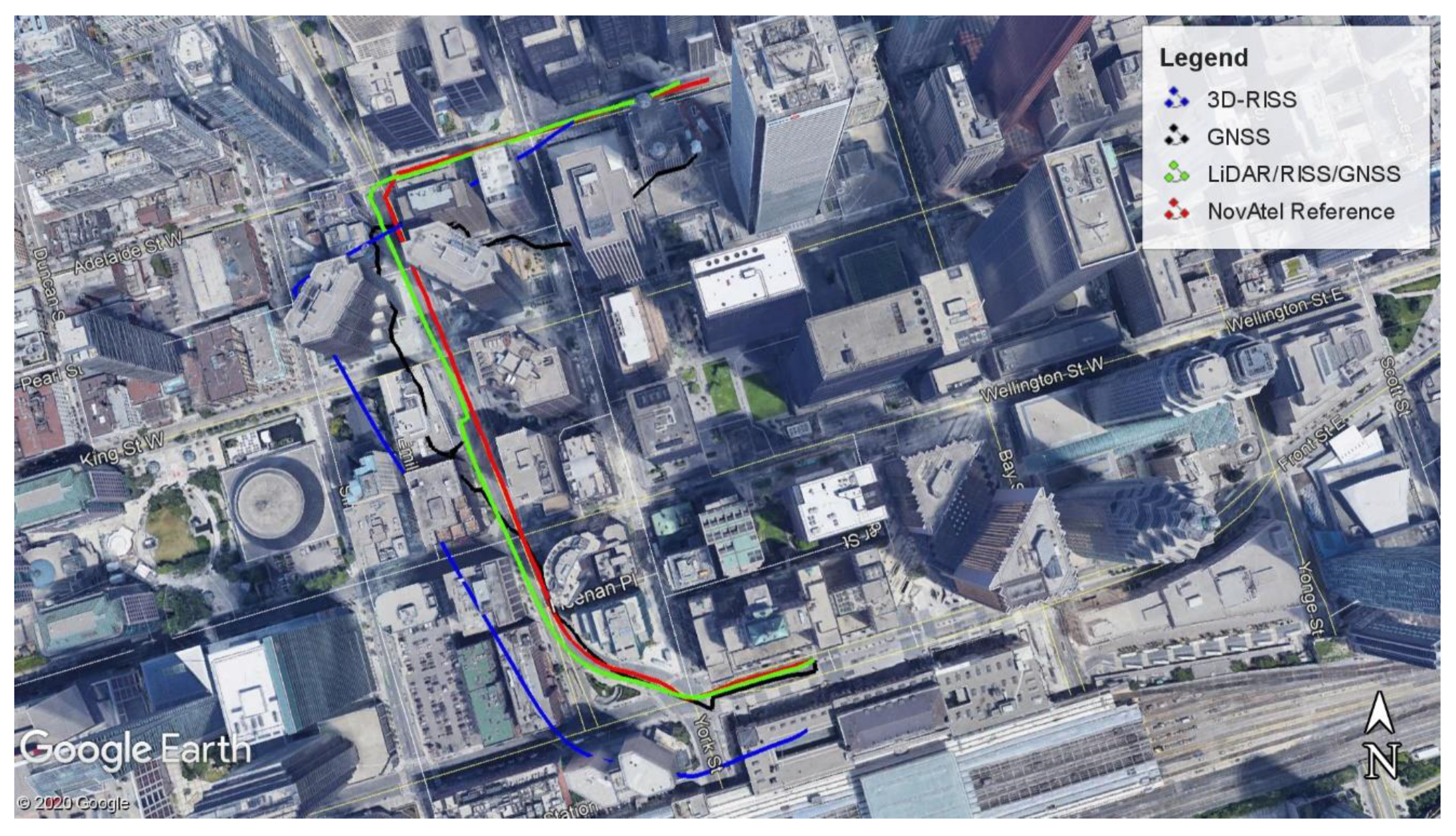
- For the first 147 s, the algorithm was using the GNSS to provide updates in the EKF as it was an open sky environment with good satellite geometry, as shown in Figure 22 from the GDOP values.
- After that, for the next 111 s, the algorithm switched to the LiDAR to provide the measurement updates as the ICP’s RMSE has a low value. As the GDOP values in Figure 22 have spiked as it lost all the GNSS satellites while entering the tunnel. Also, observed in Figure 23 that the SD of the 3D-position begins to increase in value.
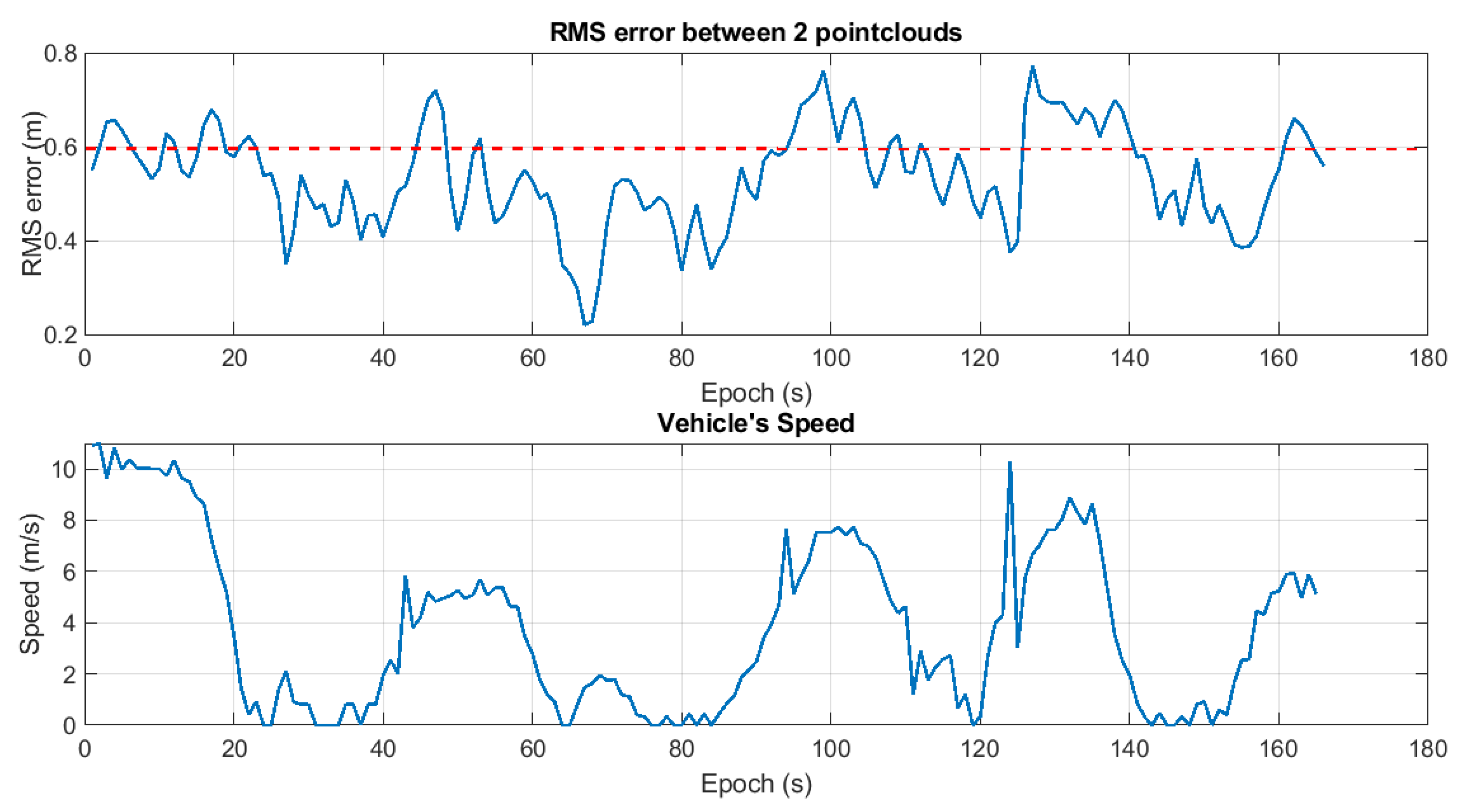
- Then, for the next 80 s, the algorithm switched to the 3D-RISS standalone to provide a navigation solution as the RMS error in the ICP was increasing, as shown in Figure 24.
- Finally, when relying only on the 3D-RISS solution, when a sharp turn is detected by the (), as shown in Figure 25, it is switched back to the LiDAR. Therefore, for the last 247 s, the switching criteria will check the GDOP and SD of the GNSS and will find them unsuitable for toggling to the GNSS. Therefore, it will use the LiDAR to provide the measurement updates for the system. As observed in Figure 22 and Figure 23, the GDOP and the SD of the 3D-position provided by the GNSS are still high, which is the reason why we did not rely on the GNSS to provide the measurement updates.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, K.; Teunissen, P.J.G.; El-Mowafy, A. The ADOP and PDOP: Two Complementary Diagnostics for GNSS Positioning. J. Surv. Eng. 2020, 146, 04020008. [Google Scholar] [CrossRef] [Green Version]
- Georgy, J.; Noureldin, A.; Goodall, C. Vehicle Navigator Using a Mixture Particle Filter for Inertial Sensors/Odometer/Map Data/GPS Integration. IEEE Trans. Consum. Electron. 2012, 58, 544–552. [Google Scholar] [CrossRef]
- Peshekhonov, V.G. Gyroscopic navigation systems: Current status and prospects. Gyroscopy Navig. 2011, 2, 111. [Google Scholar] [CrossRef]
- Binder, Y.I. Dead Reckoning Using an Attitude and Heading Reference System Based on a Free Gyro with Equatorial Orientation. Gyroscopy Navig. 2017, 8, 104–114. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Gao, Z.; Niu, X.; El-Sheimy, N. Tight Fusion of a Monocular Camera, MEMS-IMU, and Single-Frequency Multi-GNSS RTK for Precise Navigation in GNSS-Challenged Environments. Remote Sens. 2019, 11, 610. [Google Scholar] [CrossRef] [Green Version]
- Noureldin, A.; Karamat, T.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration; Springer: Berlin, Germany, 2013; pp. 297–313. [Google Scholar]
- El-Wakeel, A.S.; Osman, A.; Zorba, N.; Hassanein, H.S.; Noureldin, A. Robust Positioning for Road Information Services in Challenging Environments. IEEE Sens. J. 2020, 20, 3182–3195. [Google Scholar] [CrossRef]
- Iqbal, U.; Okou, A.F.; Noureldin, A. An Integrated Reduced Inertial Sensor System—RISS/GPS for Land Vehicle. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 1014–1021. [Google Scholar] [CrossRef]
- Balid, W.; Tafish, H.; Refai, H.H. Intelligent Vehicle Counting and Classification Sensor for Real-Time Traffic Surveillance. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1784–1794. [Google Scholar] [CrossRef]
- Veronese, L.d.; Badue, C.; Cheein, F.A.; Guivant, J.; de Souza, A.F. A Single Sensor System for Mapping in GNSS-denied environments. Cogn. Syst. Res. 2019, 56, 246–261. [Google Scholar] [CrossRef]
- Rusinkiewicz, S.; Levoy, M. Efficient Variants of the ICP Algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, S.A.S.; Haghbayan, M.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. A Survey on Odometry for Autonomous Navigation Systems. IEEE Access 2019, 7, 97466–97486. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Y.; Zhu, Q.; Liu, Z. Lidar-IMU and Wheel Odometer Based Autonomous Vehicle Localization System. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 4950–4955. [Google Scholar] [CrossRef]
- Khalife, J.; Ragothaman, S.; Kassas, Z.M. Pose Estimation with Lidar Odometry and Cellular Pseudoranges. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1722–1727. [Google Scholar]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM Integrated Navigation System Based on Graph Optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef] [Green Version]
- ABrandt; Gardner, J.F. Constrained Navigation Algorithms for Strapdown Inertial Navigation Systems with Reduced Set of Sensors. In Proceedings of the 1998 American Control Conference, ACC (IEEE Cat. No. 98CH36207), Philadelphia, PA, USA, 26 June 1998; Volume 3, pp. 1848–1852. [Google Scholar]
- Iqbal, U.; Georgy, J.; Abdelfatah, W.F.; Korenberg, M.; Noureldin, A. Enhancing Kalman Filtering–based Tightly Coupled Navigation Solution Through Remedial Estimates for Pseudorange Measurements Using Parallel Sascade Identification. Instrum. Sci. Technol. 2012, 40, 530–566. [Google Scholar] [CrossRef]
- Aboutaleb, A.; Ragab, H.; Nourledin, A. Examining the Benefits of LiDAR Odometry Integrated with GNSS and INS in Urban Areas. In Proceedings of the 32nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), Miami, FL, USA, 16–20 September 2019. [Google Scholar]
- Bogoslavskyi, I.; Stachniss, C. Efficient Online Segmentation for Sparse 3D Laser Scans. Photogramm. Fernerkund. Geoinf. 2016, 85, 41–52. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. arXiv 2019, arXiv:1912.12033. [Google Scholar]
- Velodyne LiDAR PUCK LITETM Datasheet. Available online: https://velodynelidar.com/products/puck-lite/ (accessed on 20 January 2020).
- Zermas, D.; Izzat, I.; Papanikolopoulos, N. Fast Segmentation of 3D Point Clouds: A Paradigm on LiDAR Data for Autonomous Vehicle Applications. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5067–5073. [Google Scholar] [CrossRef]
- NovAtel. OEM4 Family User Manual-Volume 1. Available online: https://forsbergpnt.com/wp-content/uploads/2016/04/OEM4-user-manual-Rev-19.pdf (accessed on 1 June 2020).
- Abosekeen, A.; Noureldin, A.; Karamt, T.; Korenberg, M. Comparative Analysis of Magnetic-Based RISS using Different MEMS-Based Sensors. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017. [Google Scholar]
- Ublox. ANN-MS Active GPS Antenna Manual. Available online: https://www.u-blox.com/en/docs/UBX-15025046 (accessed on 8 May 2020).
- NovAtel. NovAtel SPAN-SETM Manual. Available online: https://www.novatel.com/assets/Documents/Manuals/om-20000124.pdf (accessed on 8 May 2020).
- NovAtel. NovAtel SPAN IMU-CPT Manual. Available online: https://www.novatel.com/assets/Documents/Papers/IMU-CPT.pdf (accessed on 8 May 2020).
- Schneider, A. GPS Visualizer. Available online: www.gpsvisualizer.com (accessed on 8 May 2020).






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | NovAtel SPAN-CPT | VTI-MEMS IMU |
|---|---|---|
| Update Rate | 100 Hz | 20 Hz |
| Gyroscopes | ||
| Bias | <±0.0055 deg/s | <±1.5 deg/s |
| Scale Factor | <0.15% | <2% |
| Angle Random Walk | 0.0667 deg/ | 0.86 deg/ |
| Accelerometers | ||
| Scale Factor | <0.4% | <1% |
| Range | ±10 g | ±6 g |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aboutaleb, A.; El-Wakeel, A.S.; Elghamrawy, H.; Noureldin, A. LiDAR/RISS/GNSS Dynamic Integration for Land Vehicle Robust Positioning in Challenging GNSS Environments. Remote Sens. 2020, 12, 2323. https://doi.org/10.3390/rs12142323
Aboutaleb A, El-Wakeel AS, Elghamrawy H, Noureldin A. LiDAR/RISS/GNSS Dynamic Integration for Land Vehicle Robust Positioning in Challenging GNSS Environments. Remote Sensing. 2020; 12(14):2323. https://doi.org/10.3390/rs12142323
Chicago/Turabian StyleAboutaleb, Ahmed, Amr S. El-Wakeel, Haidy Elghamrawy, and Aboelmagd Noureldin. 2020. "LiDAR/RISS/GNSS Dynamic Integration for Land Vehicle Robust Positioning in Challenging GNSS Environments" Remote Sensing 12, no. 14: 2323. https://doi.org/10.3390/rs12142323