High-Precision Soil Moisture Mapping Based on Multi-Model Coupling and Background Knowledge, Over Vegetated Areas Using Chinese GF-3 and GF-1 Satellite Data


Abstract
:
1. Introduction
2. Study Area and Available Datasets
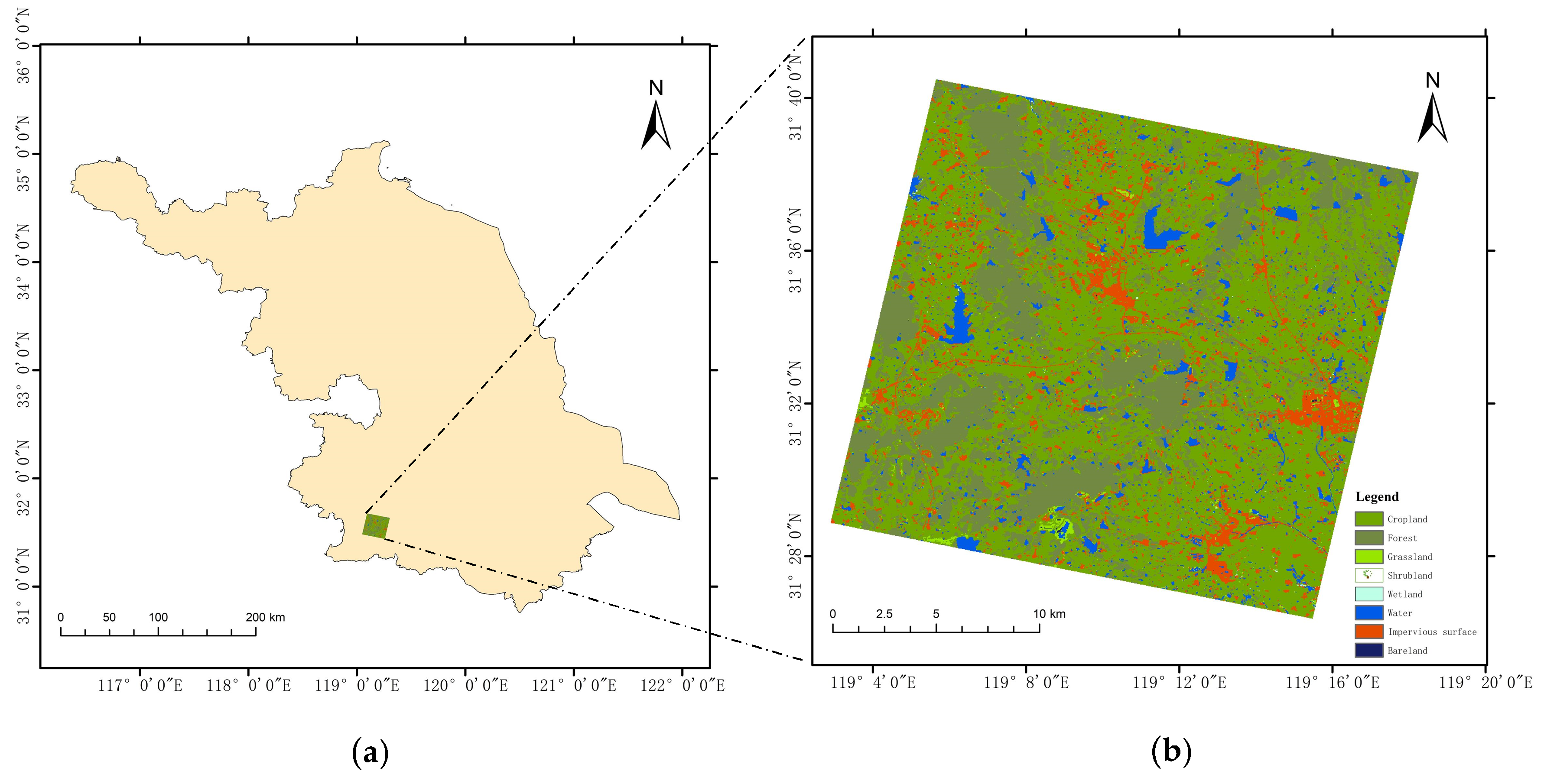
2.1. Study Area
2.2. GF-1 Data
2.3. GF-3 Data
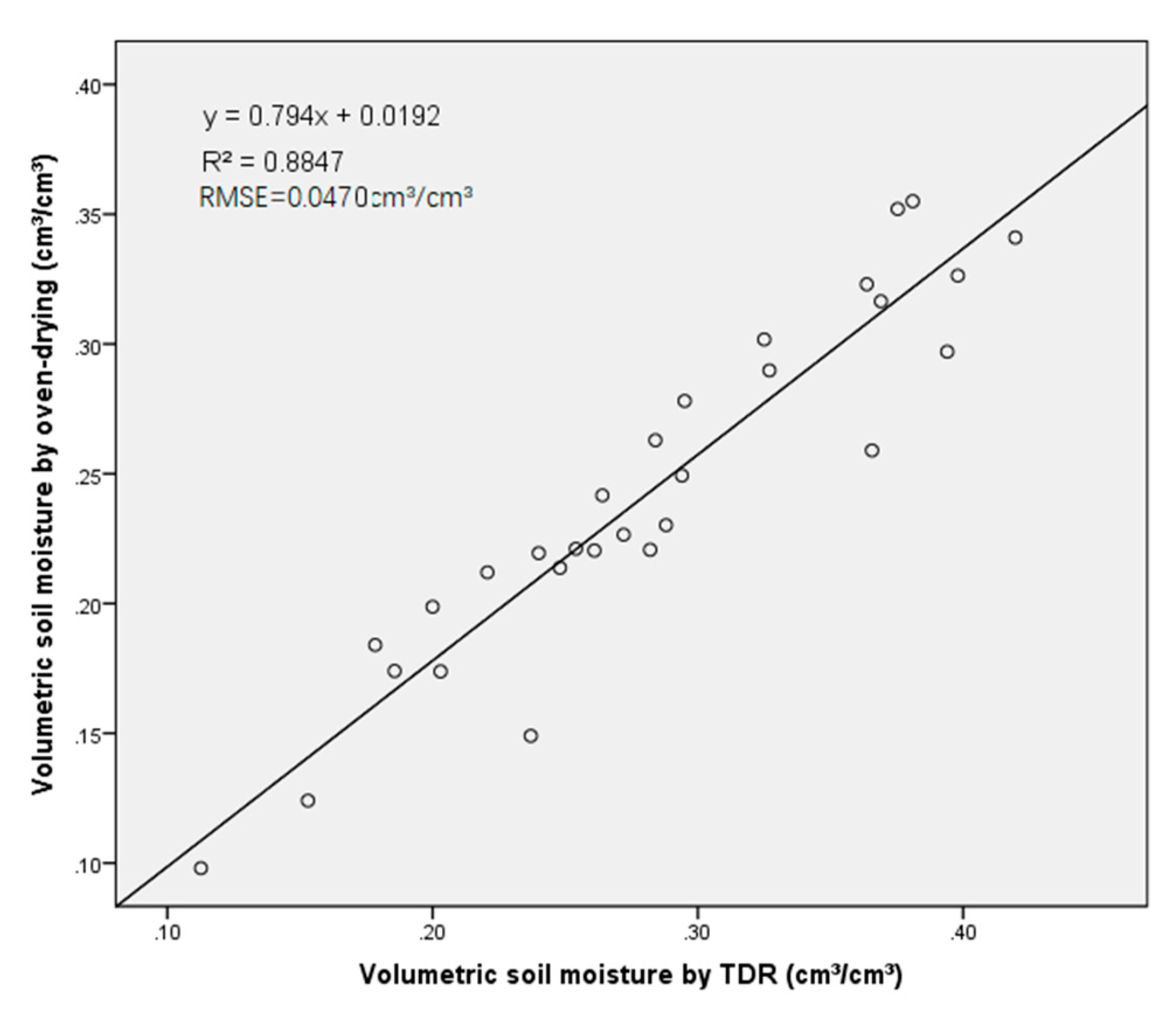
2.4. In Situ Measurements
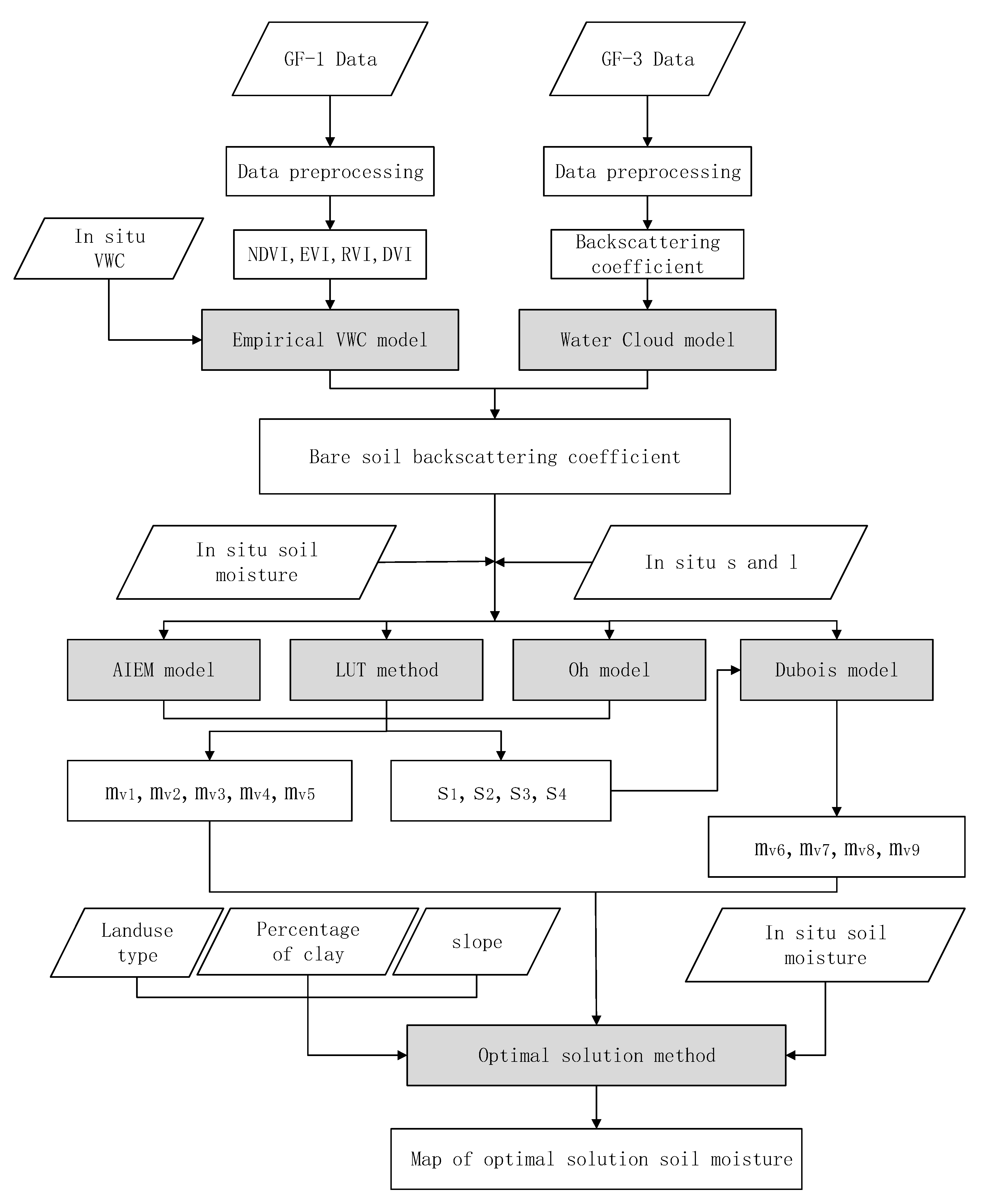
3. Methodology
3.1. Vegetation Effect Correction Models
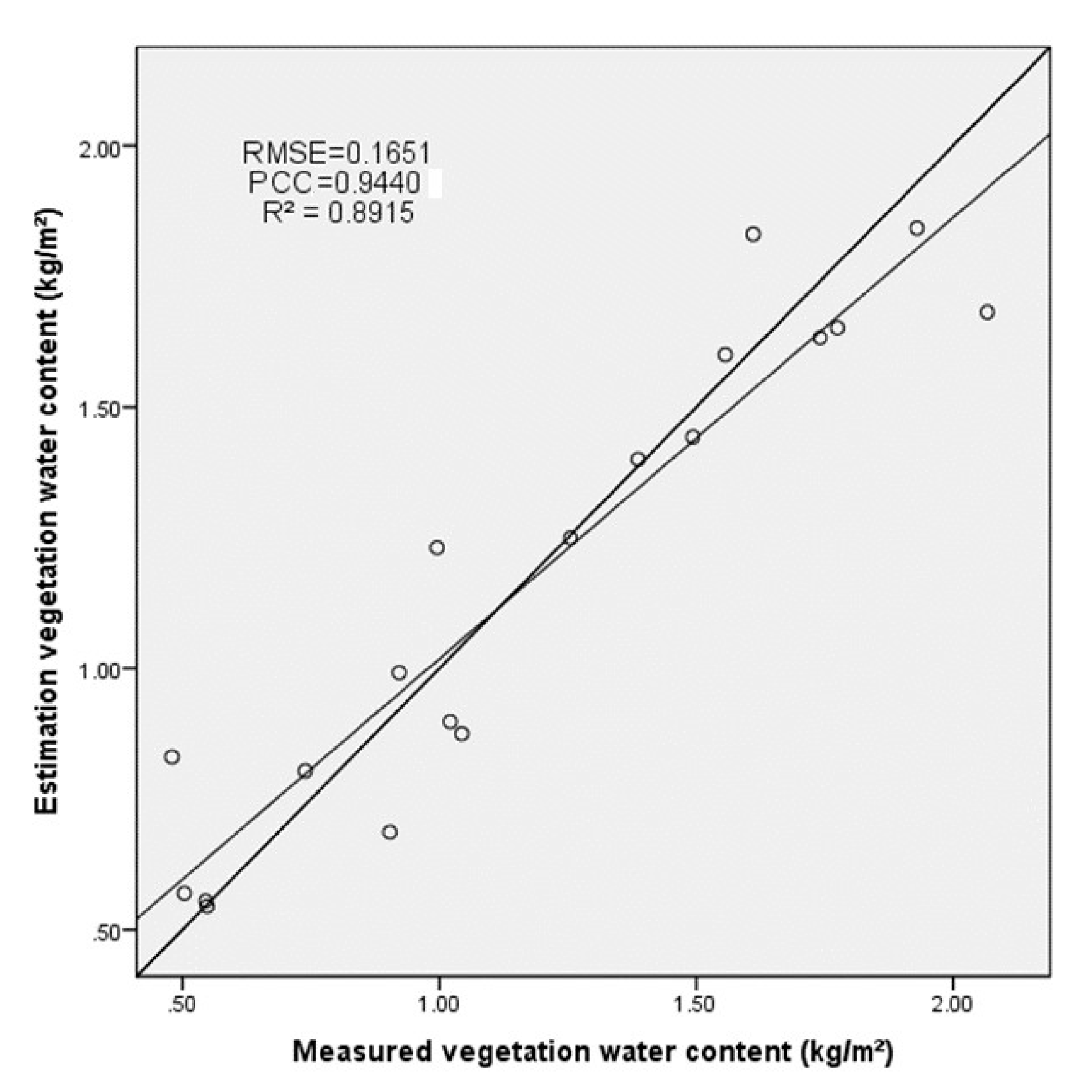
3.1.1. Vegetation Water Content Estimation Model
3.1.2. Water-Cloud Model
3.2. Soil Moisture Content Retrieval Model
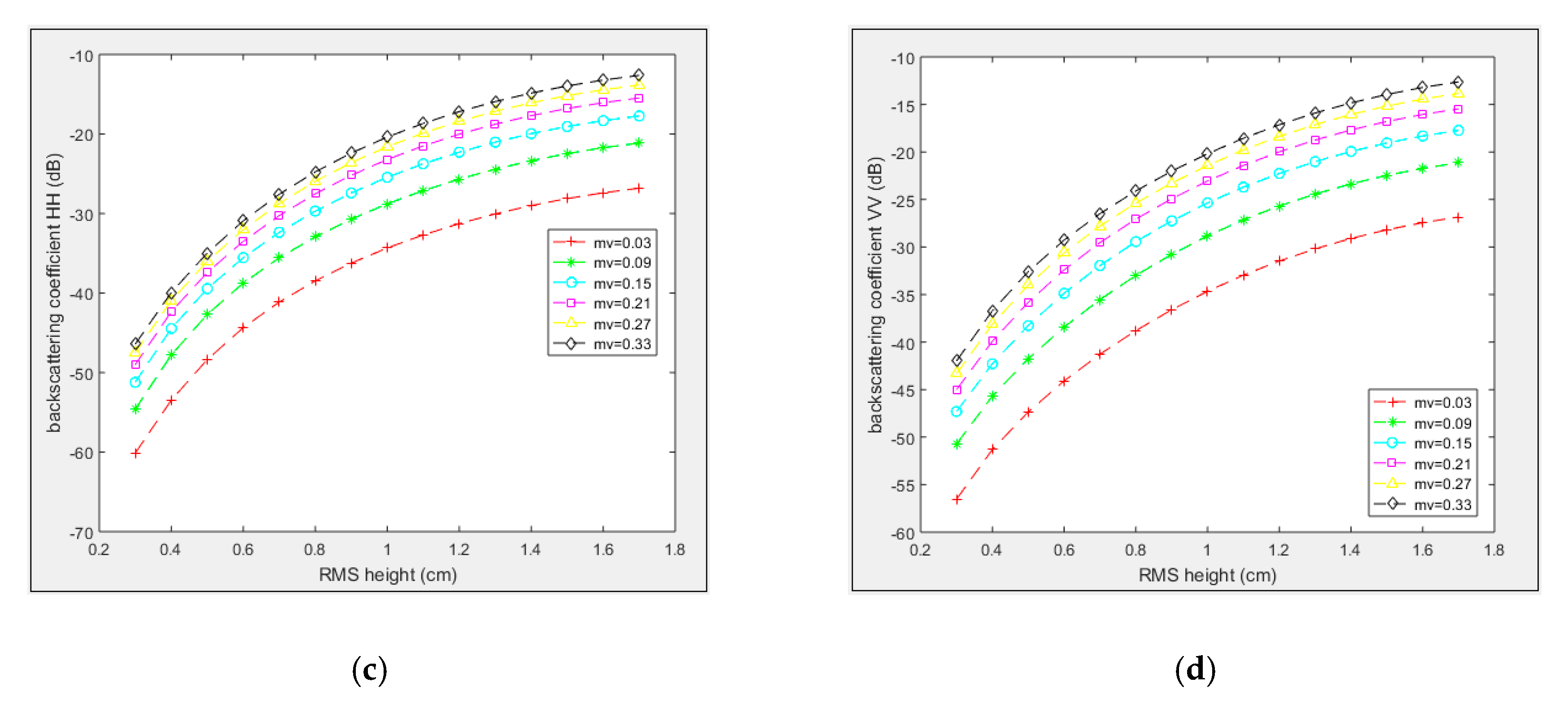
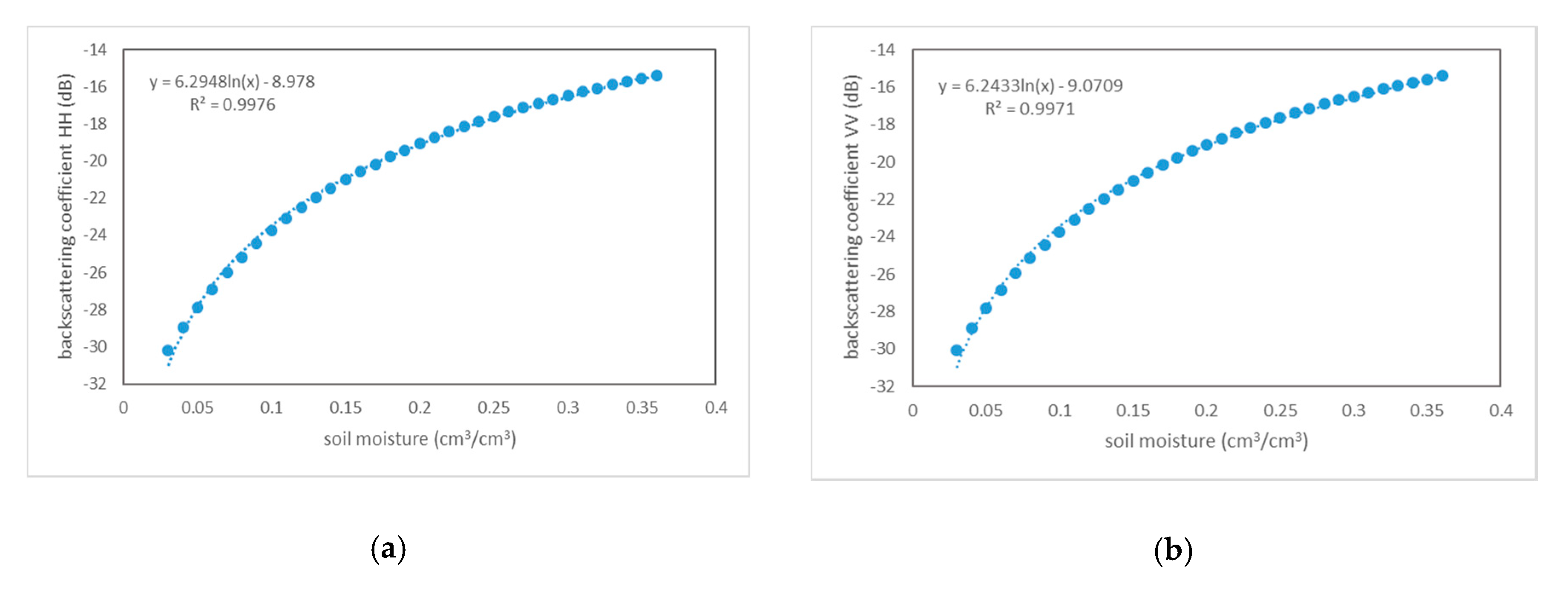
3.2.1. Estimated Model Constructed by AIEM
3.2.2. LUT Inversion Method
3.2.3. Semi-Empirical Oh Model
3.2.4. Semi-Empirical Dubois Model
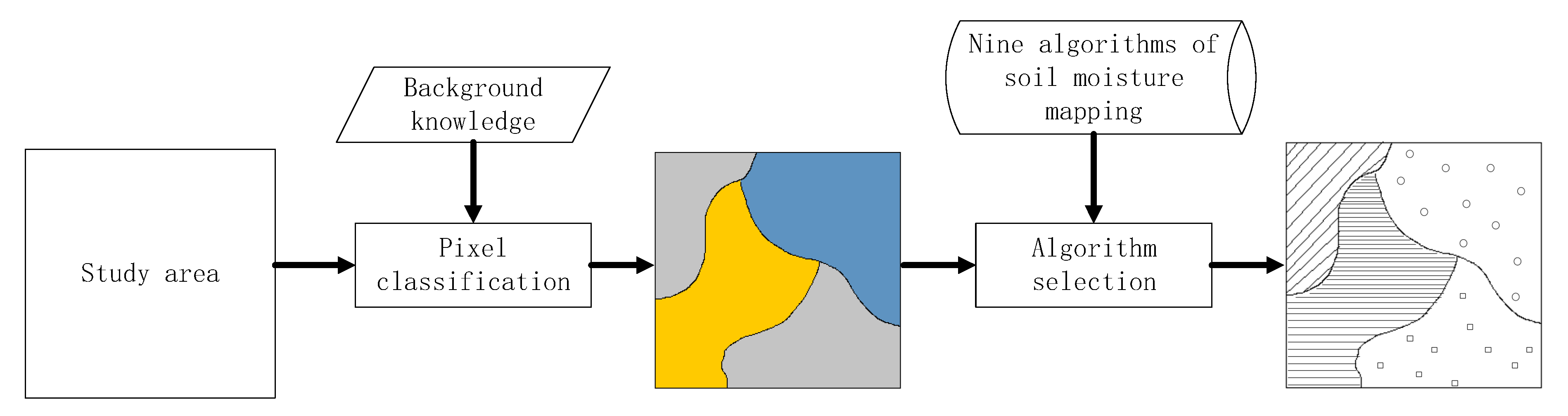
3.3. Optimal Solution Method
4. Results and Discussion
4.1. Vegetation Effect Correction
4.2. Bare Soil Moisture Estimation Based on Four Commonly Used Models
4.2.1. Bare Soil Moisture Estimation Based on AIEM
4.2.2. Bare Soil Moisture Estimation Based on the Oh Model
4.2.3. Bare Soil Moisture Estimation Based on LUT
4.2.4. Soil Moisture Estimation Based on Dubois Model
4.2.5. Validation and Analysis of the Individual Soil Moisture Inversion Models
- (1)
- The estimation model constructed using the AIEM () gives the highest accuracy for all the four verification indexes, followed by the Oh model () and LUT inversion method under HH polarization (), whereas the accuracy of the LUT model for both HH and VV polarizations () is relatively poor. The good performance of the estimation model constructed using the AIEM is attributed to the well-established theoretical model describing the radar scattering process, and at the same time, 37 sample datasets from the in-situ measurements were used as modeling data in establishing the regression model [9,42]. Previous studies have also shown that the Oh model is a highly accurate semiempirical model and that it is more favorable in the case of cross-polarized data for the inversion of complex surfaces [37,48]. However, because the model cannot express the soil moisture precisely for pixels with soil moisture below 0.04 or greater than 0.29, the precision of the model is compromised [69,70,74].
- (2)
- The RMS height, obtained from the LUT inversion method or Oh model, was used as input data for the Dubois model to estimate the soil moisture indirectly. In general, the indirect Dubois model (, , , and ) has a relatively lower inversion accuracy than the direct inversion models (, , , , and ). There are two possible reasons for this: first, significant errors exist in the process of RMS height inversion, which will be transmitted to the indirect inversion Dubois model; second, some factors, such as the residual vegetation effects and the row directional effects, may be taken as soil moisture fluctuation in the Dubois model [72,75].
- (3)
- Among the three LUT direct inversion methods (, , and ), the differences between the estimated and measured soil moisture values are relatively minimum under HH polarization (: RMSE = 0.0538, MAE = 0.0338), followed by the inversion method under VV polarization (: RMSE = 0.0769, MAE = 0.0563). The linear correlation between the estimated and measured soil moisture values is acceptable under single polarization ( and ), and the PCC values are greater than 0.7. This shows that the LUT inversion under single polarization is feasible to retrieve the soil moisture, consistent with previous results [37,40]. However, the accuracy of the direct or indirect LUT inversion under dual-polarization ( and ) is unsatisfactory, inconsistent with a previous research by Zhang et al. [56]. The possible reason for the inconsistency is that the surface coverage of the study area in the previous research was monotonous, whereas in this study, the surface coverage was complex, and the vegetation types were varied, including a certain proportion of nurseries with evident body scattering effect.
4.3. Optimal Solution Method
4.3.1. Construction of the Optimal Solution Method under Three Strategies
4.3.2. Validation and Analysis of the Three Strategies
- (1)
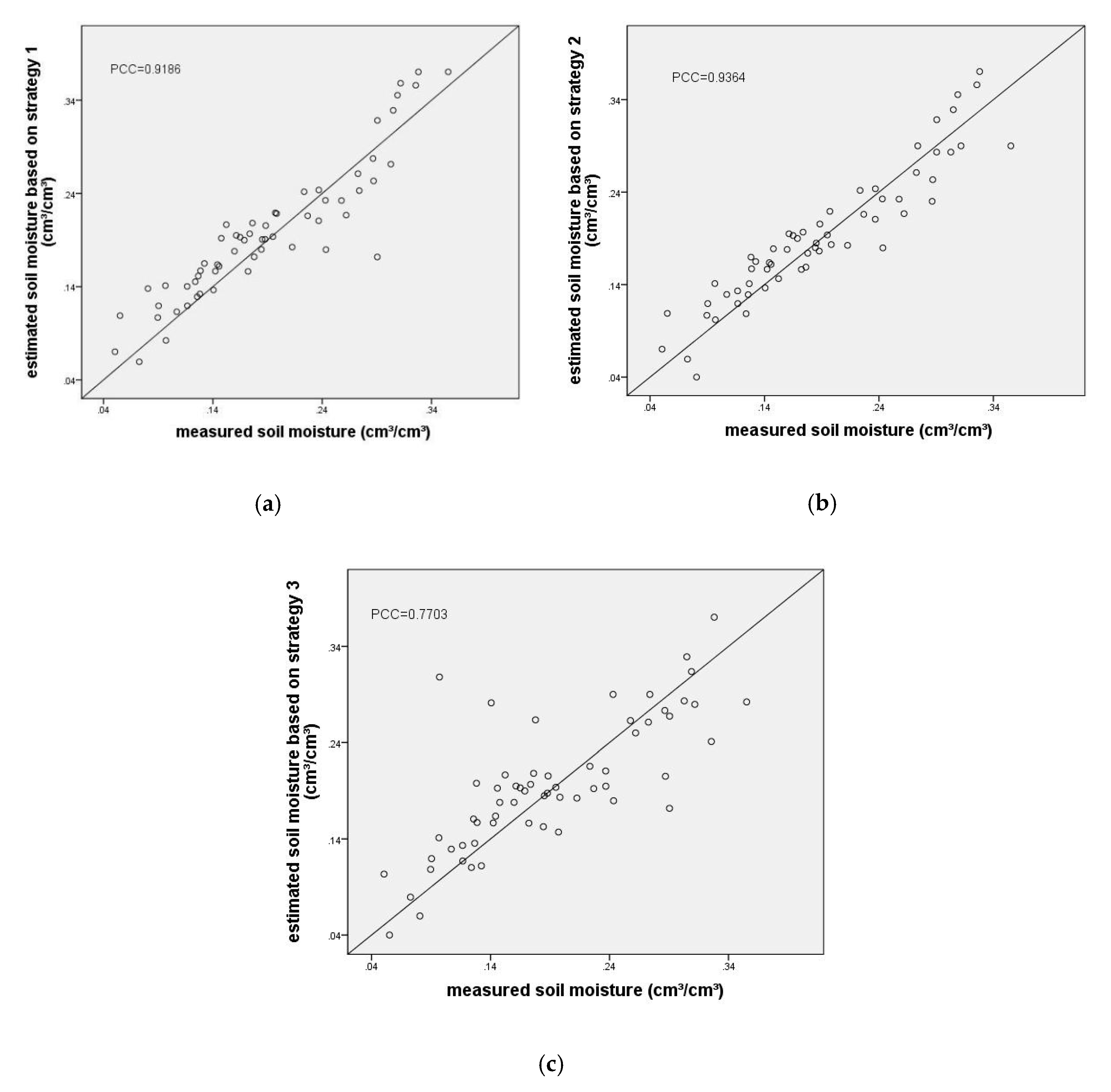
- The optimal solution method showed advantages, confirming the assumptions made in this study. Among them, the soil moisture calculated using the optimal solution method under strategies 2 and 1 was more accurate than those obtained from the nine individual inversion soil moisture maps. The RMSE index for the optimal solution method under strategy 2 was 0.005 cm³/cm³ lower than that for the individual estimation model constructed using the AIEM (: the only model with the highest accuracy among the nine individual inversion maps), and the RMSE index for the optimal solution method under strategy 1 was 0.0007 cm³/cm³ lower than that for the individual estimation model. Similarly, the PCC index for the optimal solution method under strategy 2 was 0.0249 higher than that for the individual estimation model constructed using the AIEM, and the optimal solution method under strategy 1 was 0.0071 higher than that for the individual estimation model. This means that the error between the estimated results of the optimal solution methods under most strategies and the measured soil moisture was lower and that their linear correlation was stronger compared with the individual inversion models.
- (2)
- Among the strategies used for constructing the optimal solution methods, strategy 2 gave the best accuracy, followed by strategy 1. Compared with the former two strategies, the accuracy of the optimal solution method under strategy 3 was relatively low. Nevertheless, it was still higher than the accuracy of the nine individual models (77.78%), thus demonstrating its superiority. To some extent, this inconsistent result reflects the sensitivity of the soil moisture to the different background knowledge. For the study area, the optimal solution construction strategy with the clay percentage content as the background knowledge exhibited the best performance, followed by the optimal solution construction strategy with the land use type as the background knowledge. The optimal solution strategy with the slope level as the background knowledge exhibited the lowest performance.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anagnostopoulos, V.; Petropoulos, G.P.; Ireland, G.; Carlson, T.N. A modernized version of a 1D soil vegetation atmosphere transfer model for improving its future use in land surface interactions studies. Environ. Model. Softw. 2017, 90, 147–156. [Google Scholar] [CrossRef] [Green Version]
- Gherboudj, I.; Magagi, R.; Berg, A.A.; Toth, B. Soil moisture retrieval over agricultural fields from multi-polarized and multi-angular RADARSAT-2 SAR data. Remote Sens. Environ. 2011, 115, 33–43. [Google Scholar] [CrossRef]
- She, D.; Liu, D.; Liu, Y.; Liu, Y.; Xu, C.; Qu, X.; Chen, F. Profile characteristics of temporal stability of soil water storage in two land uses. Arab. J. Geosci. 2014, 7, 21–34. [Google Scholar]
- Taibi, A.E.O.; Elfeki, A.; Zhang, G. Modeling hydrologic responses of the Zwalm catchment using the REW approach: Propagation of uncertainty in soil properties to model output. Arab. J. Geosci. 2011, 4, 1005–1018. [Google Scholar] [CrossRef]
- Kornelsen, K.C.; Coulibaly, P. Advances in soil moisture retrieval from synthetic aperture radar and hydrological application. J. Hydrol. 2013, 476, 460–489. [Google Scholar] [CrossRef]
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture–climate interactions in a changing climate: A review. Earth Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Fisher, J.B.; Melton, F.; Middleton, E.; Hain, C.; Anderson, M.; Allen, R.; McCabe, M.F.; Hook, S.; Baldocchi, D.; Townsend, P.A.; et al. The future of evapotranspiration: Global requirements for ecosystem functioning, carbon and climate feedbacks, agricultural management, and water resources. Water Resour. Res. 2017, 53, 2618–2626. [Google Scholar] [CrossRef]
- Qiaozhen, M.U.; Zhao, M.; Steven, W.J. Improvements to a MODIS global terrestrial evapotranspiration algorithm. Remote Sens. Environ. 2011, 115, 1781–1800. [Google Scholar]
- Kong, J.; Yang, J.; Zhen, P.; Li, J.; Yang, L. A Coupling Model for Soil Moisture Retrieval in Sparse Vegetation Covered Areas Based on Microwave and Optical Remote Sensing Data. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7162–7173. [Google Scholar] [CrossRef]
- Amazirh, A.; Merlin, O.; Er-Raki, S.; Gao, Q.; Rivalland, V.; Malbeteau, Y.; Khabba, S.; JoséEscorihuelac, M. Retrieving surface soil moisture at high spatio-temporal resolution from a synergy between Sentinel-1 radar and Landsat thermal data: A study case over bare soil. Remote Sens. Environ. 2018, 211, 321–337. [Google Scholar] [CrossRef]
- Du, Y.; Ulaby, F.T.; Dobson, M.C. Sensitivity to soil moisture by active and passive microwave sensors. IEEE Trans. Geosci. Remote Sens. 2000, 38, 105–114. [Google Scholar] [CrossRef]
- Bruckler, L.; Witono, H.; Stengel, P. Near surface soil moisture estimation from microwave measurements. Remote Sens. Environ. 1988, 26, 101–121. [Google Scholar] [CrossRef]
- Bao, Y.; Zhang, Y.; Wang, J.; Min, J. Surface soil moisture estimation over dense crop using Envisat ASAR and Landsat TM imagery: An approach. Int. J. Remote Sens. 2014, 35, 6190–6212. [Google Scholar] [CrossRef]
- Baghdadi, N.; Hajj, M.E.; Zribi, M. Coupling SAR C-band and optical data for soil moisture and leaf area index retrieval over irrigated grasslands. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3551–3554. [Google Scholar] [CrossRef] [Green Version]
- Dianjun, Z.; Guoqing, Z. Estimation of Soil Moisture from Optical and Thermal Remote Sensing: A Review. Sensors 2016, 16, 1308. [Google Scholar]
- Verstraeten, W.W.; Veroustraete, F.; van der Sande, C.J.; Grootaers, I.; Feyen, J. Soil moisture retrieval using thermal inertia, determined with visible and thermal spaceborne data, validated for European forests. Remote Sens. Environ. 2006, 101, 299–314. [Google Scholar] [CrossRef]
- Yansong, B.; Libin, L.; Shanyu, W.; Deng, K.A.K.; Petropoulos, G.P. Surface soil moisture retrievals over partially vegetated areas from the synergy of Sentinel-1 and Landsat 8 data using a modified water-cloud model. Int. J. Appl. Earth Obs. Geoinf. 2018, 72, 76–85. [Google Scholar]
- Zhang, X.; Chen, B.; Fan, H.; Huang, J. The Potential Use of Multi-Band SAR Data for Soil Moisture Retrieval over Bare Agricultural Areas: Hebei, China. Remote Sens. 2015, 8, 7. [Google Scholar] [CrossRef] [Green Version]
- Mattar, C.; Wigneron, J.P.; Sobrino, J.A.; Novello, N.; Calvet, J.C.; Albergel, C.; Richaume, P.; Mialon, A.; Guyon, D.; Jiménez-Muñoz, J.C. A Combined Optical-Microwave Method to Retrieve Soil Moisture Over Vegetated Areas. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1404–1413. [Google Scholar] [CrossRef]
- Santamaria-Artigas, A.; Mattar, C.; Wigneron, J.P. Application of a Combined Optical-Passive Microwave Method to Retrieve Soil Moisture at Regional Scale Over Chile. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1493–1504. [Google Scholar] [CrossRef]
- Miernecki, M.; Wigneron, J.P.; Lopez-Baeza, E.; Kerr, Y.; De Jeu, R.; De Lannoy, G.J.M.; Jackson, T.J.; O’Neill, P.E.; Schwankh, M.; Moran, R.F.; et al. Comparison of SMOS and SMAP soil moisture retrieval approaches using tower-based radiometer data over a vineyard field. Remote Sens. Environ. 2014, 154, 89–101. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Qin, Z.; Li, M.; Li, W. Progress in soil moisture estimation from remote sensing data for agricultural drought monitoring. Proc. SPIE Int. Soc. Opt. Eng. 2006, 6366, 636601. [Google Scholar]
- Zeng, J.; Li, Z.; Chen, Q.; Bi, H. Method for Soil Moisture and Surface Temperature Estimation in the Tibetan Plateau Using Spaceborne Radiometer Observations. IEEE Geosci. Remote Sens. Lett. 2015, 12, 97–101. [Google Scholar] [CrossRef]
- Chen, Q.; Zeng, J.; Cui, C.; Li, Z.; Chen, K.; Bai, X.; Xu, J. Soil Moisture Retrieval From SMAP: A Validation and Error Analysis Study Using Ground-Based Observations Over the Little Washita Watershed. IEEE Trans. Geosci. Remote Sens. 2018, 56, 1394–1408. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Batlivala, P.P.; Dobson, M.C. Microwave Backscatter Dependence on Surface Roughness, Soil Moisture, and Soil Texture: Part I-Bare Soil. IEEE Trans. Geosci. Electron. 1978, GE-16, 286–295. [Google Scholar] [CrossRef]
- Zhao, X.; Huang, N.; Song, X.F.; Niu, Z.; Li, Z.Y. A new method for soil moisture inversion in vegetation-covered area based on Radarsat 2 and Landsat 8. J. Infrared Millim. Waves 2016, 35, 609–616. [Google Scholar]
- Lievens, H.; Verhoest, N.E.C. On the Retrieval of Soil Moisture in Wheat Fields from L-Band SAR Based on Water Cloud Modeling, the IEM, and Effective Roughness Parameters. IEEE Geosci. Remote Sens. Lett. 2011, 8, 740–744. [Google Scholar] [CrossRef]
- Wang, C.; Qi, J.; Moran, S.; Marsett, R. Soil moisture estimation in a semiarid rangeland using ERS-2 and TM imagery. Remote Sens. Environ. 2004, 90, 178–189. [Google Scholar] [CrossRef]
- Holah, N.; Baghdadi, N.; Zribi, M.; Bruand, A.; King, C. Potential of ASAR/ENVISAT for the characterization of soil surface parameters over bare agricultural fields. Remote Sens. Environ. 2005, 96, 78–86. [Google Scholar] [CrossRef] [Green Version]
- Joseph, A.T.; Velde, R.V.D.; O’Neill, P.E.; Lang, R.; Gish, T. Effects of corn on C- and L-band radar backscatter: A correction method for soil moisture retrieval. Remote Sens. Environ. 2010, 114, 2417–2430. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Mcdonald, K.; Sarabandi, K.; Dobson, M.C. Michigan microwave canopy scattering model. Int. J. Remote Sens. 1990, 11, 1223–1253. [Google Scholar] [CrossRef]
- Hu, D.; Guo, N.; Sha, S.; Wang, L. Soil Moisture Retrieved Using Radarsat-2/SAR and MODIS Remote Sensing Data in Vegetated Areas of Loess Plateau Soil Moisture Retrieved Using Radarsat-2/SAR and MODIS Remote Sensing Data in Vegetated Areas of Loess Plateau. Remote Sens. Technol. Appl. 2015, 30. [Google Scholar]
- Baghdadi, N.; King, C.; Chanzy, A.; Wigneron, J.P. An empirical calibration of the integral equation model based on SAR data, soil moisture and surface roughness measurement over bare soils. Int. J. Remote Sens. 2002, 23, 4325–4340. [Google Scholar] [CrossRef]
- He, B.; Xing, M.; Bai, X. A Synergistic Methodology for Soil Moisture Estimation in an Alpine Prairie Using Radar and Optical Satellite Data. Remote Sens. 2014, 6, 10966–10985. [Google Scholar] [CrossRef] [Green Version]
- Fung, A.K.; Li, Z.; Chen, K.S. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 369. [Google Scholar] [CrossRef]
- Baghdadi, N.; Zribi, M. Evaluation of radar backscatter models IEM, OH and Dubois using experimental observations. Int. J. Remote Sens. 2006, 27, 3831–3852. [Google Scholar] [CrossRef]
- Wu, T.D.; Chen, K.S.; Fung, A.K.; Tsay, M.K. A transition model for the reflection coefficient in surface scattering. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2040–2050. [Google Scholar]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. Semi-empirical model of the ensemble-averaged differential Mueller matrix for microwave backscattering from bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1348–1355. [Google Scholar] [CrossRef] [Green Version]
- Dubois, P.C.; Van Zyl, J.; Engman, T. Measuring soil moisture with imaging radars. IEEE Trans. Geosci. Remote Sens. 1995, 33, 926. [Google Scholar] [CrossRef] [Green Version]
- Khabazan, S.; Motagh, M.; Hosseini, M. Evaluation of Radar Backscattering Models IEM, OH, and Dubois using L and C-Bands SAR Data over different vegetation canopy covers and soil depths. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W3, 225–230. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Ding, J.; Zou, J.; Liu, B.; Zhang, J.; Chen, W. Soil Moisture Retrival Based on Sentinel-1 Imagery under Sparse Vegetation Coverage. Sensors 2019, 19, 589. [Google Scholar] [CrossRef] [Green Version]
- Biftu, G.F.; Gan, T.Y. Retrieving near-surface soil moisture from Radarsat SAR data. Water Resour. Res. 1999, 35, 1569–1579. [Google Scholar] [CrossRef]
- Chai, X.; Zhang, T.; Shao, Y.; Gong, H.; Liu, L.; Xie, K. Modeling and Mapping Soil Moisture of Plateau Pasture Using RADARSAT-2 Imagery. Remote Sens. 2015, 7, 1279–1299. [Google Scholar] [CrossRef] [Green Version]
- Chiara, P.; Brian, B.; Alexander, G.; Dwyer, E. Quality Assessment of the CCI ECV Soil Moisture Product Using ENVISAT ASAR Wide Swath Data over Spain, Ireland and Finland. Remote Sens. 2015, 7, 15388–15423. [Google Scholar]
- Dabrowska, K.; Budzynska, M.; Tomaszewska, M.; Malińska, A.; Gatkowska, M.; Bartold, M.; Malek, I. Assessment of Carbon Flux and Soil Moisture in Wetlands Applying Sentinel-1 Data. Remote Sens. 2016, 8, 756. [Google Scholar] [CrossRef] [Green Version]
- Alexakis, D.D.; Mexis, F.K.; Vozinaki, A.K.; Daliakopoulos, I.N.; Tsanis, I.K. Soil Moisture Content Estimation Based on Sentinel-1 and Auxiliary Earth Observation Products. A Hydrological Approach. Sensors 2017, 17, 1455. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N. Synergetic Use of Sentinel-1 and Sentinel-2 Data for Soil Moisture Mapping at 100 m Resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.S.; Di, L.; Yu, E.; Lin, L.; Zhang, C.; Tang, J. Rapid Flood Progress Monitoring in Cropland with NASA SMAP. Remote Sens. 2019, 11, 191. [Google Scholar] [CrossRef] [Green Version]
- Meyer, T.; Weihermüller, L.; Vereecken, H.; Jonard, F. Vegetation Optical Depth and Soil Moisture Retrieved from L-Band Radiometry over the Growth Cycle of a Winter Wheat. Remote Sens. 2018, 10, 1637. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Zhang, Z.; Paloscia, S.; Zhang, H.; Wu, F.; Wu, Q. Permafrost Soil Moisture Monitoring Using Multi-Temporal TerraSAR-X Data in Beiluhe of Northern Tibet, China. Remote Sens. 2018, 10, 1577. [Google Scholar] [CrossRef] [Green Version]
- Leconte, R.; Brissette, F.; Galarneau, M.; Rousselle, J. Mapping near-surface soil moisture with RADARSAT-1 synthetic aperture radar data. Water Resour. Res. 2004, 40. [Google Scholar] [CrossRef]
- Zhang, L.; Lv, X.; Chen, Q.; Sun, G.; Yao, J. Estimation of Surface Soil Moisture during Corn Growth Stage from SAR and Optical Data Using a Combined Scattering Model. Remote Sens. 2020, 12, 1844. [Google Scholar] [CrossRef]
- Hoskera, A.K.; Nico, G.; Ahmed, M.I.; Whitbread, A. Accuracies of Soil Moisture Estimations Using a Semi-Empirical Model Over Bare Soil Agricultural Croplands from Sentinel-1 SAR Data. Remote Sens. 2020, 12, 1664. [Google Scholar] [CrossRef]
- Page, M.L.; Jarlan, L.; El Hajj, M.M.; Zribi, M.; Baghdadi, N.; Boone, A. Potential for the Detection of Irrigation Events on Maize Plots Using Sentinel-1 Soil Moisture Products. Remote Sens. 2020, 12, 1621. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, Q.Y.; Yao, S.; Wang, Q.; Zeng, J.; Zhao, S.; Ma, J. Soil Moisture Retrieval from the Chinese GF-3 Satellite and Optical Data over Agricultural Fields. Sensors 2018, 18, 2675. [Google Scholar] [CrossRef] [Green Version]
- He, L.; Chen, J.M.; Chen, K.S. Simulation and SMAP Observation of Sun-Glint Over the Land Surface at the L-Band. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2589–2604. [Google Scholar] [CrossRef]
- Zribi, M.; Gorrab, A.; Baghdadi, N.; Lili-Chabaane, Z. Influence of Radar Frequency on the Relationship between Bare Surface Soil Moisture Vertical Profile and Radar Backscatter. IEEE Geosci. Remote Sens. Lett. 2014, 848–852. [Google Scholar] [CrossRef] [Green Version]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef] [Green Version]
- Bindlish, R.; Barros, A.P. Parameterization of vegetation backscatter in radar-based, soil moisture estimation. Remote Sens. Environ. 2001, 76, 130–137. [Google Scholar] [CrossRef]
- Hansan, Z.; Quan, J. Accurate Measurement of Key Parameters of Film Capacitors for EV Power Control Unit. In Proceedings of the 2019 IEEE 4th Int. Future Energy Electronics Conference (IFEEC), Singapore, 25–28 November 2019; Volume 10, p. 1109. [Google Scholar]
- Eom, H.J.; Fung, A.K. A scatter model for vegetation up to Ku-band. Remote Sens. Environ. 1984, 15, 185–200. [Google Scholar] [CrossRef]
- Zhang, J.H.; Xu, Y.; Yao, F.M.; Wng, P.J.; Gou, W.J.; Yang, L.M. Advances in estimation methods of vegetation water content based on optical remote sensing techniques. Sci. China Technol. Sci. 2010, 5, 5–13. [Google Scholar] [CrossRef]
- Prakash, R.; Singh, D.; Pathak, N.P.A. Fusion approach to retrieve soil moisture with SAR and optical data. Remote Sens. 2012, 5, 196–206. [Google Scholar] [CrossRef]
- Bai, X.; He, B.; Li, X. Optimum Surface Roughness to Parameterize Advanced Integral Equation Model for Soil Moisture Retrieval in Prairie Area Using Radarsat-2 Data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2437–2449. [Google Scholar] [CrossRef]
- Zheng, X.M.; Ding, Y.L.; Zhao, K.; Jiang, T.; Li, X.F.; Zhang, S.Y.; Li, Y.Y.; Wu, L.L.; Sun, J.; Ren, J.H.; et al. Estimation of Vegetation Water Content from Landsat 8 OLI Data. Spectrosc. Spectr. Anal. 2014, 34, 3385–3390. [Google Scholar]
- Zeng, J.; Chen, K.S.; Liu, Y.; Bi, H.; Chen, Q. Radar Response of Off-Specular Bistatic Scattering to Soil Moisture and Surface Roughness at L-Band. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1–5. [Google Scholar] [CrossRef]
- Dobson, M.C. Microwave dielectric behavior of wet soil-Part II: Dielectric-mixing models. IEEE Trans. Geosci. Remote Sens 1985, 23, 35–46. [Google Scholar] [CrossRef]
- Barber, M.; Grings, F.; Perna, P.; Piscitelli, M.; Maas, M.; Bruscantini, C.A.; Jacobo-berlles, J.; Karszenbaum, H. Speckle Noise and Soil Heterogeneities as Error Sources in a Bayesian Soil Moisture Retrieval Scheme for SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 942–951. [Google Scholar] [CrossRef]
- Zribi, M.; Dechambre, M. A new empirical model to retrieve soil moisture and roughness from C-band radar data. Remote Sens. Environ. 2003, 84, 42–52. [Google Scholar] [CrossRef]
- Shi, J.; Wang, J.; Hsu, A.Y.; O’Neill, P.E.; Engman, E.T. Estimation of bare surface soil moisture and surface roughness parameter using L-band SAR image data. IEEE Trans. Geosci. Remote Sens. 2002, 35, 1254–1266. [Google Scholar]
- Chen, J.; Jia, Y.; Yu, F. Soil moisture inversion by radar with dual-polarization. Trans. Chin. Soc. Agric. Eng. 2013, 5, 109–115. [Google Scholar]
- Gou, S.; Bai, X.; Chen, Y.; Zhang, S.; Zhu, Q.; Du, P. An Improved Approach for Soil Moisture Estimation in Gully Fields of the Loess Plateau Using Sentinel-1A Radar Images. Remote Sens. 2019, 11, 349. [Google Scholar]
- Brunner, D.; Bruzzone, L.; Ferro, A.; Fortuny, J.; Lemoine, G. Analysis of the double bounce scattering mechanism of buildings in VHR SAR data. Proc. SPIE Int. Soc. Opt. Eng. 2008, 7109. [Google Scholar] [CrossRef]
- Al-Bakri, J.; Suleiman, A.; Berg, A. A comparison of two models to predict soil moisture from remote sensing data of RADARSAT II. Arab. J. Geosci. 2014, 7, 4851–4860. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type Class | Number of Samples | Proportion of Total Samples (%) | Proportion of This Class in the Entire Study Area (%) | |
|---|---|---|---|---|
| Land Use Type | Farmland | 63 | 67.02 | 68.62 |
| Forest and shrub | 25 | 26.60 | 30.51 | |
| Grassland | 4 | 4.26 | 0.84 | |
| Bare land | 2 | 2.13 | 0.03 | |
| Percentage Content of Clay (%) | 14 | 1 | 1.06 | 0.67 |
| 26 | 37 | 39.36 | 35.04 | |
| 28 | 26 | 27.66 | 35.94 | |
| 29 | 28 | 29.79 | 26.12 | |
| 37 | 2 | 2.13 | 2.23 | |
| Slope (°) | ≤1 | 36 | 38.30 | 41.53 |
| 1–2 | 32 | 34.04 | 28.47 | |
| 2–3 | 12 | 12.77 | 10.34 | |
| 3–4 | 7 | 7.45 | 5.02 | |
| >4 | 7 | 7.45 | 14.64 |
| Input Parameters | Minimum | Maximum | Interval |
|---|---|---|---|
| Incidence angle (°) | 30 | 60 | 1 |
| RMS height (cm) | 0.3 | 1.8 | 0.1 |
| Correlation length (cm) | 5 | 25 | 1 |
| Soil moisture (vol. cm³/cm³) | 0.03 | 0.36 | 0.01 |
| VWC model | Empirical Parameters | PCC | ||||||
|---|---|---|---|---|---|---|---|---|
| a | b | c | ||||||
| VWCNDVI | 26.0820 | −1.8558 | 1.0915 | 0.9158 | ||||
| VWCEVI | 4.6957 | 1.4673 | 0.9790 | 0.9054 | ||||
| VWCRVI | 1.3854 | −1.7960 | 1.3724 | 0.9124 | ||||
| VWCDVI | 46.9080 | 5.8157 | 0.9459 | 0.8805 | ||||
| VWC | d | e | f | g | h | 0.9442 | ||
| 1.1604 | 4.3773 | 18.2684 | 14.1764 | −4.8787 | ||||
| Combined Roughness Parameter | Formula | PCC | References |
|---|---|---|---|
| 0.8070 | [9] | ||
| 0.8339 | |||
| 0.9579 | [70] | ||
| 0.9659 | |||
| 0.9629 | [71] | ||
| 0.9680 |
| Inversion Models | RMSE (cm³/cm³) | MAE (cm³/cm³) | PCC | Bias (cm³/cm³) |
|---|---|---|---|---|
| 0.0321 | 0.0260 | 0.9115 | −0.0150 | |
| 0.0538 | 0.0338 | 0.7441 | −0.0117 | |
| 0.0769 | 0.0563 | 0.7287 | −0.0426 | |
| 0.1059 | 0.0811 | 0.5679 | 0.0230 | |
| 0.0428 | 0.0306 | 0.8843 | 0.0174 | |
| 0.0710 | 0.0567 | 0.6551 | −0.0420 | |
| 0.0687 | 0.0529 | 0.4114 | 0.0266 | |
| 0.0761 | 0.0608 | 0.6278 | 0.0107 | |
| 0.0676 | 0.0564 | 0.4599 | −0.0141 |
| Land Use Types | Optimal Model | RMSE (cm³/cm³) | MAE (cm³/cm³) | PCC | BIAS (cm³/cm³) |
|---|---|---|---|---|---|
| farmland | 0.0327 | 0.0264 | 0.9436 | −0.0187 | |
| grassland | 0.0171 | 0.0128 | 0.8984 | 0.0128 | |
| shrub | 0.0340 | 0.0273 | 0.8763 | 0.0065 | |
| bare land | 0.0231 | 0.0201 | 0.9033 | 0.0134 |
| Percentage Content of Clay (%) | Optimal Model | RMSE (cm³/cm³) | MAE (cm³/cm³) | PCC | Bias (cm³/cm³) |
|---|---|---|---|---|---|
| 14 | 0.0468 | 0.0338 | 0.8409 | −0.0296 | |
| 26 | 0.0354 | 0.0291 | 0.9145 | −0.0119 | |
| 28 | 0.0231 | 0.0193 | 0.9673 | −0.0141 | |
| 29 | 0.0251 | 0.0213 | 0.9555 | 0.0193 | |
| 37 | 0.0261 | 0.0269 | 0.9376 | −0.0196 |
| Levels of Slope | Optimal Model | RMSE (cm³/cm³) | MAE (cm³/cm³) | PCC | BIAS (cm³/cm³) |
|---|---|---|---|---|---|
| Level 1 (≤1°) | 0.0438 | 0.0379 | 0.8419 | −0.0156 | |
| Level 2 (1–2°) | 0.0216 | 0.0204 | 0.9114 | −0.0125 | |
| Level 3 (2–3°) | 0.0387 | 0.0291 | 0.8871 | 0.0102 | |
| Level 4 (3–4°) | 0.0332 | 0.0254 | 0.8933 | −0.0144 | |
| Level 5 (>4°) | 0.0380 | 0.0288 | 0.8674 | 0.0135 |
| Modeling Strategies | RMSE (cm³/cm³) | MAE (cm³/cm³) | PCC | BIAS (cm³/cm³) |
|---|---|---|---|---|
| Strategy 1 | 0.0314 | 0.0249 | 0.9186 | −0.0182 |
| Strategy 2 | 0.0271 | 0.0225 | 0.9364 | −0.0133 |
| Strategy 3 | 0.0502 | 0.0351 | 0.7703 | −0.0231 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Wang, C.; Yu, T.; Gu, X.; Liu, Q. High-Precision Soil Moisture Mapping Based on Multi-Model Coupling and Background Knowledge, Over Vegetated Areas Using Chinese GF-3 and GF-1 Satellite Data. Remote Sens. 2020, 12, 2123. https://doi.org/10.3390/rs12132123
Han L, Wang C, Yu T, Gu X, Liu Q. High-Precision Soil Moisture Mapping Based on Multi-Model Coupling and Background Knowledge, Over Vegetated Areas Using Chinese GF-3 and GF-1 Satellite Data. Remote Sensing. 2020; 12(13):2123. https://doi.org/10.3390/rs12132123
Chicago/Turabian StyleHan, Leran, Chunmei Wang, Tao Yu, Xingfa Gu, and Qiyue Liu. 2020. "High-Precision Soil Moisture Mapping Based on Multi-Model Coupling and Background Knowledge, Over Vegetated Areas Using Chinese GF-3 and GF-1 Satellite Data" Remote Sensing 12, no. 13: 2123. https://doi.org/10.3390/rs12132123