Automatic Grassland Cutting Status Detection in the Context of Spatiotemporal Sentinel-1 Imagery Analysis and Artificial Neural Networks



Abstract
:
1. Introduction
2. Materials
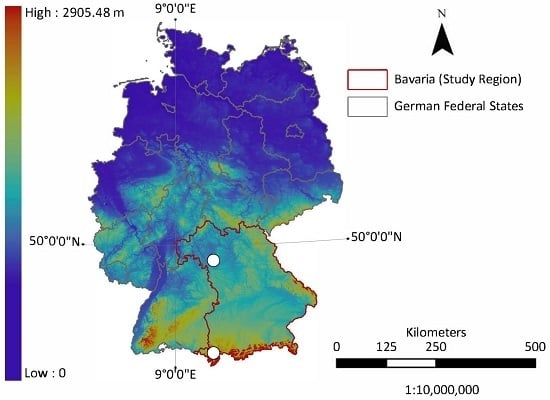
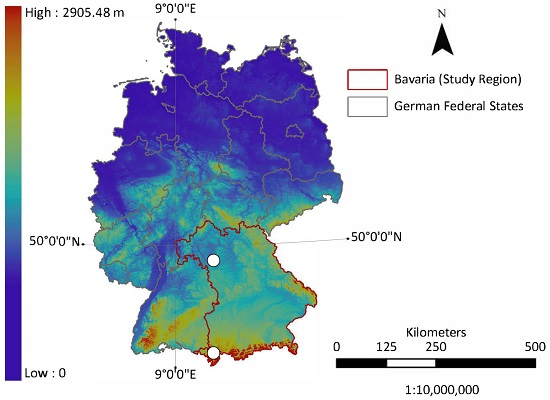
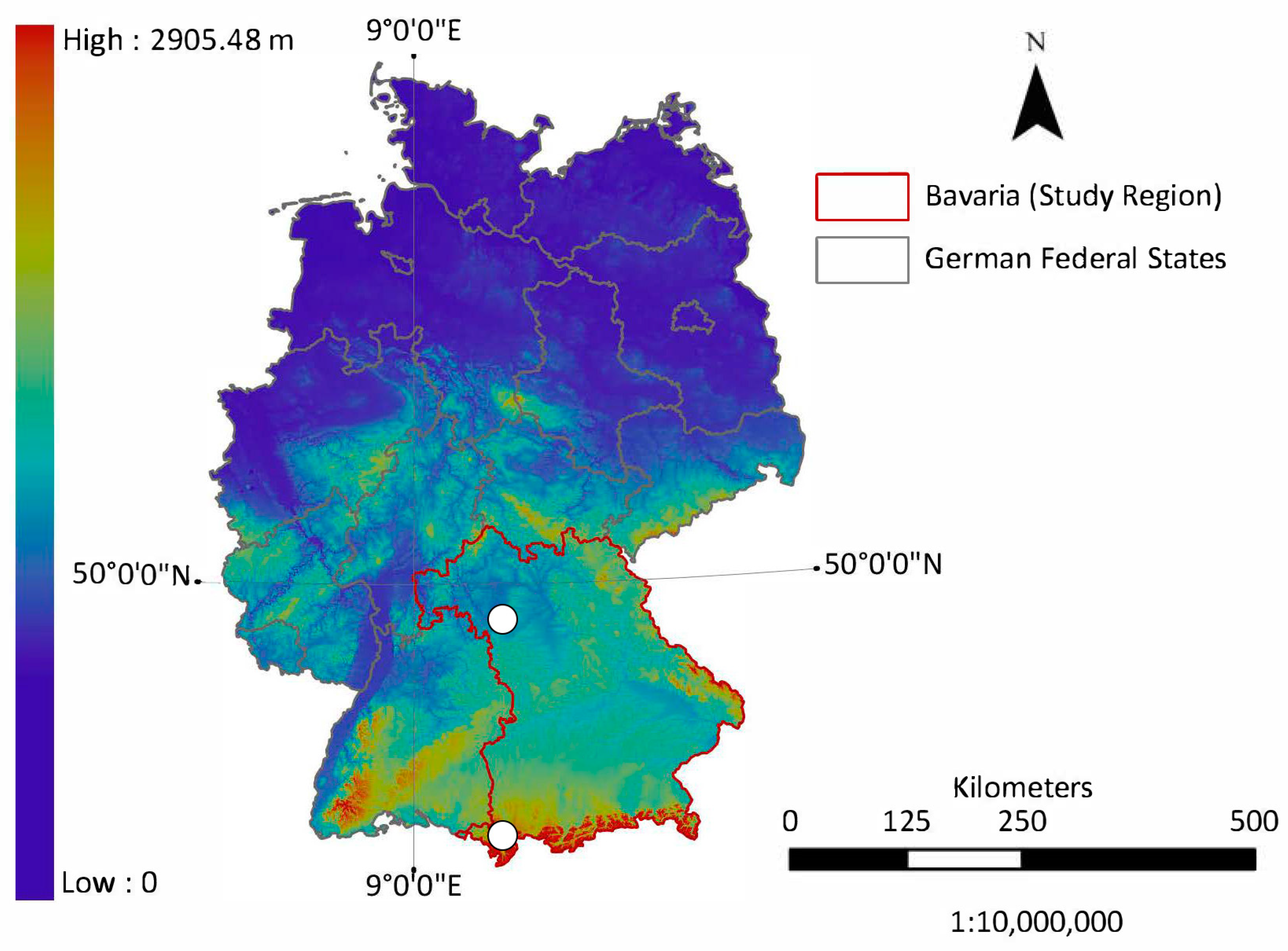
2.1. Experimental Sites
2.2. Remotely Sensed Data
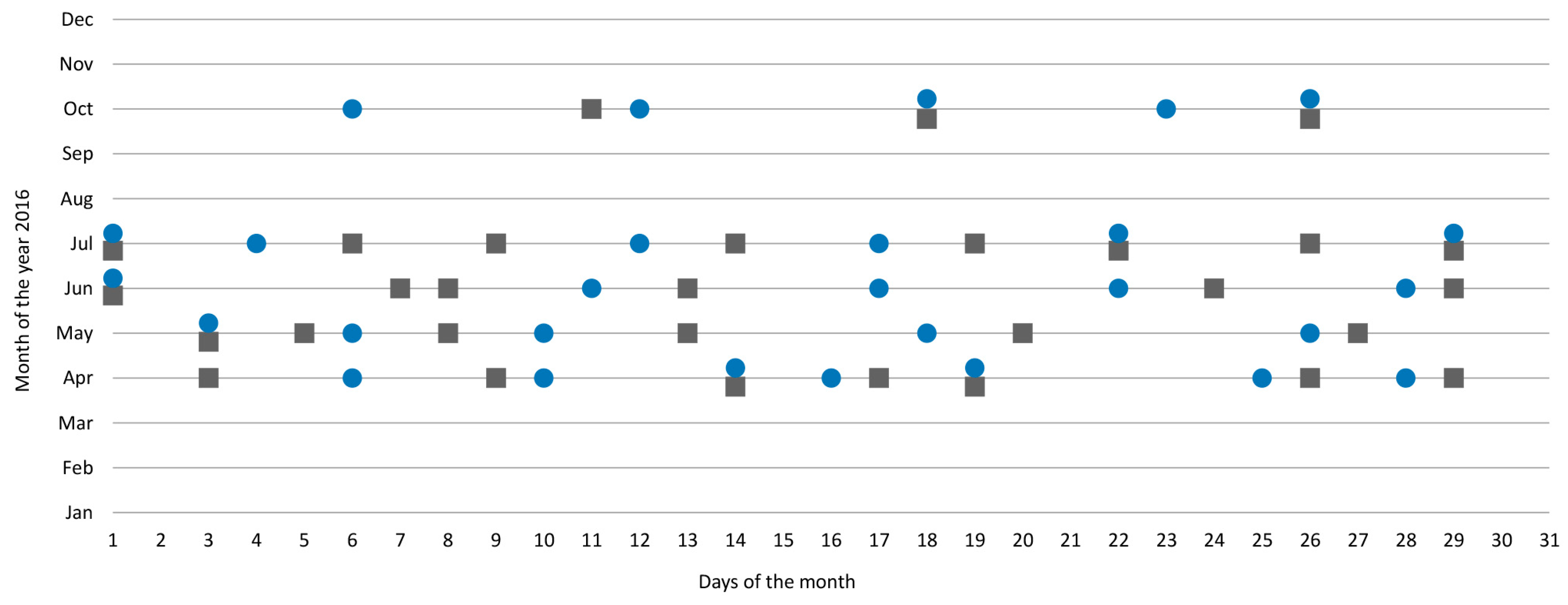
2.3. Ground Truth Campaign
3. Methods
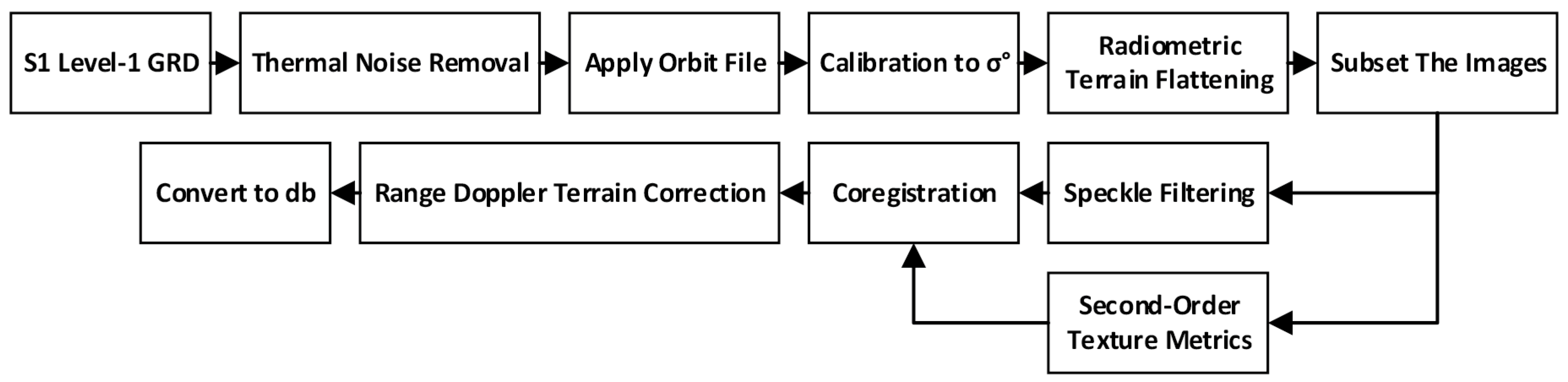
3.1. Data Preprocessing
3.2. ANN Model Description
3.3. Model Implementation
4. The Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| LAI | Leaf Area Index | Asc. | Ascending |
| SAR | Synthetic Aperture Radar | Des. | Descending |
| ANNs | Artificial Neural Networks | HH | Horizontal-Horizontal |
| SVM | Support Vector Machine | VV | Vertical-Vertical |
| GRD | Ground Range Detected | HV | Horizontal-Vertical |
| IW | Interferometric Wide | VH | Vertical-Horizontal |
| RON | Relative Orbit Number | MSE | Mean Square Error |
| MLP-NNs | Multilayer Perceptron Neural Networks | RMSE | Root Mean Square Error |
| SNNS | Stuttgart Neural Network Simulator | SRTM | Shuttle Radar Topography Mission |
| ESA | European Space Agency | EU | European Union |
References
- Ali, I.; Cawkwell, F.; Dwyer, E.; Barrett, B.; Green, S. Satellite remote sensing of grasslands: From observation to management. J. Plant Ecol. 2016, 9, 649–671. [Google Scholar] [CrossRef]
- O’Mara, F.P. The role of grasslands in food security and climate change. Ann. Bot.-Lond. 2012, 110, 1263–1270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Topfer, K.; Wolfensohn, J.; Lash, J. World Resources 2000–2001: People and Ecosystems: The Fraying Web of Life; World Resources Inst.: Washington, DC, USA, 2000; 389p. [Google Scholar]
- Scurlock, J.M.O.; Hall, D.O. The global carbon sink: a grassland perspective. Glob. Chang. Biol. 1998, 4, 229–233. [Google Scholar] [CrossRef]
- Bergman, K.O.; Ask, L.; Askling, J.; Ignell, H.; Wahlman, H.; Milberg, P. Importance of boreal grasslands in Sweden for butterfly diversity and effects of local and landscape habitat factors. Biodivers. Conserv. 2008, 17, 139–153. [Google Scholar] [CrossRef]
- Pokluda, P.; Hauck, D.; Cizek, L. Importance of marginal habitats for grassland diversity: Fallows and overgrown tall-grass steppe as key habitats of endangered ground-beetle Carabus hungaricus. Insect Conserv. Divers. 2012, 5, 27–36. [Google Scholar] [CrossRef]
- Voormansik, K.; Jagdhuber, T.; Olesk, A.; Hajnsek, I.; Papathanassiou, K.P. Towards a detection of grassland cutting practices with dual polarimetric TerraSAR-X data. Int. J. Remote Sens. 2013, 34, 8081–8103. [Google Scholar] [CrossRef]
- Herrmann, A.; Kelm, M.; Kornher, A.; Taube, F. Performance of grassland under different cutting regimes as affected by sward composition, nitrogen input, soil conditions and weather—A simulation study. Eur. J. Agron. 2005, 22, 141–158. [Google Scholar] [CrossRef]
- Lopes, M.; Fauvel, M.; Girard, S.; Sheeren, D. Object-Based Classification of Grasslands from High Resolution Satellite Image Time Series Using Gaussian Mean Map Kernels. Remote Sens. (Basel) 2017, 9. [Google Scholar] [CrossRef]
- Newton, A.C.; Hill, R.A.; Echeverria, C.; Golicher, D.; Benayas, J.M.R.; Cayuela, L.; Hinsley, S.A. Remote sensing and the future of landscape ecology. Prog. Phys. Geogr. 2009, 33, 528–546. [Google Scholar] [CrossRef] [Green Version]
- Dusseux, P.; Corpetti, T.; Hubert-Moy, L.; Corgne, S. Combined Use of Multi-Temporal Optical and Radar Satellite Images for Grassland Monitoring. Remote Sens. (Basel) 2014, 6, 6163–6182. [Google Scholar] [CrossRef] [Green Version]
- Hong, G.; Zhang, A.N.; Zhou, F.Q.; Brisco, B. Integration of optical and synthetic aperture radar (SAR) images to differentiate grassland and alfalfa in Prairie area. Int. J. Appl. Earth Obs. 2014, 28, 12–19. [Google Scholar] [CrossRef]
- Friedl, M.A.; Schimel, D.S.; Michaelsen, J.; Davis, F.W.; Walker, H. Estimating grassland biomass and leaf area index using ground and satellite data. Int. J. Remote Sens. 1994, 15, 1401–1420. [Google Scholar] [CrossRef]
- Skriver, H.; Svendsen, M.T.; Thomsen, A.G. Multitemporal C- and L-band polarimetric signatures of crops. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2413–2429. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Melack, J.M.; Dobson, M.C. The use of imaging radars for ecological applications—A review. Remote Sens. Environ. 1997, 59, 141–156. [Google Scholar] [CrossRef]
- Schuster, C.; Schmidt, T.; Conrad, C.; Kleinschmit, B.; Forster, M. Grassland habitat mapping by intra-annual time series analysis—Comparison of RapidEye and TerraSAR-X satellite data. Int. J. Appl. Earth Obs. 2015, 34, 25–34. [Google Scholar] [CrossRef]
- Wiseman, G.; McNairn, H.; Homayouni, S.; Shang, J.L. RADARSAT-2 Polarimetric SAR Response to Crop Biomass for Agricultural Production Monitoring. IEEE J.-STARS 2014, 7, 4461–4471. [Google Scholar] [CrossRef]
- Barrett, B.; Nitze, I.; Green, S.; Cawkwell, F. Assessment of multi-temporal, multi-sensor radar and ancillary spatial data for grasslands monitoring in Ireland using machine learning approaches. Remote Sens. Environ. 2014, 152, 109–124. [Google Scholar] [CrossRef] [Green Version]
- Stiles, J.M.; Sarabandi, K. Electromagnetic scattering from grassland Part I: A fully phase-coherent scattering model. IEEE Trans. Geosci. Remote Sens. 2000, 38, 339–348. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. An Empirical-Model and an Inversion Technique for Radar Scattering from Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Luckman, A.J. The effects of topography on mechanisms of radar backscatter from coniferous forest and upland pasture. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1830–1834. [Google Scholar] [CrossRef]
- Hill, M.J.; Ticehurst, C.J.; Lee, J.S.; Grunes, M.R.; Donald, G.E.; Henry, D. Integration of optical and radar classifications for mapping pasture type in western Australia. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1665–1681. [Google Scholar] [CrossRef]
- Hill, M.J.; Donald, G.E.; Vickery, P.J. Relating radar backscatter to biophysical properties of temperate perennial grassland. Remote Sens. Environ. 1999, 67, 15–31. [Google Scholar] [CrossRef]
- Tamm, T.; Zalite, K.; Voormansik, K.; Talgre, L. Relating Sentinel-1 Interferometric Coherence to Mowing Events on Grasslands. Remote Sens. 2016, 8, 802. [Google Scholar] [CrossRef]
- Schieche, B.; Erasmi, S.; Schrage, T.; Hurlemann, P. Monitoring and registering of grassland and fallow fields with multitemporal ERS data within a district of lower Saxony, Germany. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium, IGARSS’99 Proceedings, Hamburg, Germany, 28 June–2 July 1999; Volume 752, pp. 759–761. [Google Scholar]
- Smith, A.M.; Buckley, J.R. Investigating RADARSAT-2 as a tool for monitoring grassland in western Canada. Can. J. Remote Sens. 2011, 37, 93–102. [Google Scholar] [CrossRef]
- Moreau, S.; Le Toan, T. Biomass quantification of Andean wetland forages using ERS satellite SAR data for optimizing livestock management. Remote Sens. Environ. 2003, 84, 477–492. [Google Scholar] [CrossRef]
- Macelloni, G.; Paloscia, S.; Pampaloni, P.; Marliani, F.; Gai, M. The relationship between the backscattering coefficient and the biomass of narrow and broad leaf crops. IEEE Trans. Geosci. Remote Sens. 2001, 39, 873–884. [Google Scholar] [CrossRef]
- Schuster, C.; Ali, I.; Lohmann, P.; Frick, A.; Förster, M.; Kleinschmit, B. Towards Detecting Swath Events in TerraSAR-X Time Series to Establish NATURA 2000 Grassland Habitat Swath Management as Monitoring Parameter. Remote Sens. 2011, 3, 1308–1322. [Google Scholar] [CrossRef] [Green Version]
- Voormansik, K.; Jagdhuber, T.; Zalite, K.; Noorma, M.; Hajnsek, I. Observations of Cutting Practices in Agricultural Grasslands Using Polarimetric SAR. IEEE J.-STARS 2016, 9, 1382–1396. [Google Scholar] [CrossRef]
- Yuan, Z.; Wang, L.N.; Ji, X. Prediction of concrete compressive strength: Research on hybrid models genetic based algorithms and ANFIS. Adv. Eng. Softw. 2014, 67, 156–163. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; van der Heijden, G.W.A.M.; Verzakov, S.; Schaepman, M.E. Estimating grassland Biomass using SVM band shaving of hyperspectral data. Photogramm. Eng. Remote Sens. 2007, 73, 1141–1148. [Google Scholar] [CrossRef]
- Ali, I.; Cawkwell, F.; Dwyer, E.; Green, S. Modeling Managed Grassland Biomass Estimation by Using Multitemporal Remote Sensing Data—A Machine Learning Approach. IEEE J.-STARS 2017, 10, 3254–3264. [Google Scholar] [CrossRef]
- BGR. BÜK2000. Available online: https://www.bgr.bund.de/DE/Themen/Boden/Informationsgrundlagen/Bodenkundliche_Karten_Datenbanken/BUEK200/buek200_node.html (accessed on 15 January 2018).
- DWD. Available online: http://www.dwd.de/DE/leistungen/klimadatendeutschland/mittelwerte/nieder_8110_akt_html.html?view=nasPublication&nn=16102 (accessed on 15 January 2018).
- Atkinson, P.M.; Tatnall, A.R.L. Neural networks in remote sensing—Introduction. Int. J. Remote Sens. 1997, 18, 699–709. [Google Scholar] [CrossRef]
- Taravat, A.; Latini, D.; Frate, F.D. Fully Automatic Dark-Spot Detection From SAR Imagery With the Combination of Nonadaptive Weibull Multiplicative Model and Pulse-Coupled Neural Networks. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2427–2435. [Google Scholar] [CrossRef]
- Bishop, C.M. Neural Networks for Pattern Recognition; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Foody, G.M. Thematic map comparison: Evaluating the statistical significance of differences in classification accuracy. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Skidmore, A.K.; Turner, B.J.; Brinkhof, W.; Knowles, E. Performance of a neural network: Mapping forests using GIS and remotely sensed data. Photogramm. Eng. Remote Sens. 1997, 63, 501–514. [Google Scholar]
- Taravat, A.; Proud, S.; Peronaci, S.; Del Frate, F.; Oppelt, N. Multilayer Perceptron Neural Networks Model for Meteosat Second Generation SEVIRI Daytime Cloud Masking. Remote Sens. (Basel) 2015, 7, 1529–1539. [Google Scholar] [CrossRef] [Green Version]
- McNairn, H.; Champagne, C.; Shang, J.; Holmstrom, D.; Reichert, G. Integration of optical and Synthetic Aperture Radar (SAR) imagery for delivering operational annual crop inventories. ISPRS J. Photogramm. Remote Sens. 2009, 64, 434–449. [Google Scholar] [CrossRef]
- McNairn, H.; Shang, J.; Champagne, C.; Jiao, X. TerraSAR-X and RADARSAT-2 for crop classification and acreage estimation. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; pp. II-898–II-901. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC3, 610–621. [Google Scholar] [CrossRef]
- Su, W.; Li, J.; Chen, Y.; Liu, Z.; Zhang, J.; Low, T.M.; Suppiah, I.; Hashim, S.A.M. Textural and local spatial statistics for the object-oriented classification of urban areas using high resolution imagery. Int. J. Remote Sens. 2008, 29, 3105–3117. [Google Scholar] [CrossRef]
- Taravat, A.; Del Frate, F.; Cornaro, C.; Vergari, S. Neural Networks and Support Vector Machine Algorithms for Automatic Cloud Classification of Whole-Sky Ground-Based Images. IEEE Geosci. Remote Sens. 2015, 12, 666–670. [Google Scholar] [CrossRef]
- Zell, A.; Mamier, G.; Vogt, M.; Mache, N.; Hübner, R.; Döring, S.; Herrmann, K.; Soyez, T.; Schmalzl, M.; Sommer, T. SNNS, Stuttgart Neural Network Simulator, User Manual; Version 4.1; Institute for Parallel and Distributed High Performance Systems, University of Stuttgart: Stuttgart, Germany, 1995. [Google Scholar]
- Wooding, M.; Griffiths, G.; Evans, R.; Bird, P.; Kenward, D.; Keyte, G.E. Temporal monitoring of soil moisture using ERS-1 SAR data. Available online: https://bit.ly/2OnQyFr (accessed on 25 March 2019).
- Zoughi, R.; Bredow, J.; Moore, R.K. Evaluation and Comparison of Dominant Backscattering Sources at 10 Ghz in 2 Treatments of Tall-Grass Prairie. Remote Sens. Environ. 1987, 22, 395–412. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Long, D.G.; Blackwell, W.J.; Elachi, C.; Fung, A.K.; Ruf, C.; Sarabandi, K.; Zebker, H.A.; Van Zyl, J. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Ulaby, F.T.; Batlivala, P.P.; Dobson, M.C. Microwave Backscatter Dependence on Surface Roughness, Soil Moisture and Soil Texture: Part I-Bare Soil. IEEE Trans. Geosci. Electron. 1978, 16, 286–295. [Google Scholar] [CrossRef]
- Ferrazzoli, P.; Paloscia, S.; Pampaloni, P.; Schiavon, G.; Sigismondi, S.; Solimini, D. The potential of multifrequency polarimetric SAR in assessing agricultural and arboreous biomass. IEEE Trans. Geosci. Remote Sens. 1997, 35, 5–17. [Google Scholar] [CrossRef]
- Pierce, L.E.; Bergen, K.M.; Dobson, M.C.; Ulaby, F.T. Multitemporal land-cover classification using SIR-C/X-SAR imagery. Remote Sens. Environ. 1998, 64, 20–33. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RON | Asc/Des | AcquisitionTime (UTC) | Average Incidence Angle (degree) | |||
|---|---|---|---|---|---|---|
| Triesdorf | Kempten | |||||
| Near | Far | Near | Far | |||
| 66 | Des | 05:32:45 | 35.18 | 35.29 | 35.22 | 35.27 |
| 117 | Asc | 17:06:08 | 37.15 | 37.26 | 37.19 | 37.24 |
| 168 | Des | 05:24:47 | 36.21 | 36.32 | 36.42 | 36.47 |
| Name | Acronyms | Formula | Equation Number |
|---|---|---|---|
| VV SAR Intensity | VV-Int | --- | --- |
| VH SAR Intensity | VH-Int | ||
| VV SAR Homogeneity | VV-Hom | (Equation 5) | |
| VH SAR Homogeneity | VH-Hom | ||
| VV SAR Entropy | VV-Ent | (Equation 6) | |
| VH SAR Entropy | VH-Ent | ||
| VV SAR Contrast | VV-Con | (Equation 7) | |
| VH SAR Contrast | VH-Con | ||
| VV SAR Dissimilarity | VV-Dis | (Equation 8) | |
| VH SAR Dissimilarity | VH-Dis |
| (a) | (b) | (c) | (d) | |
|---|---|---|---|---|
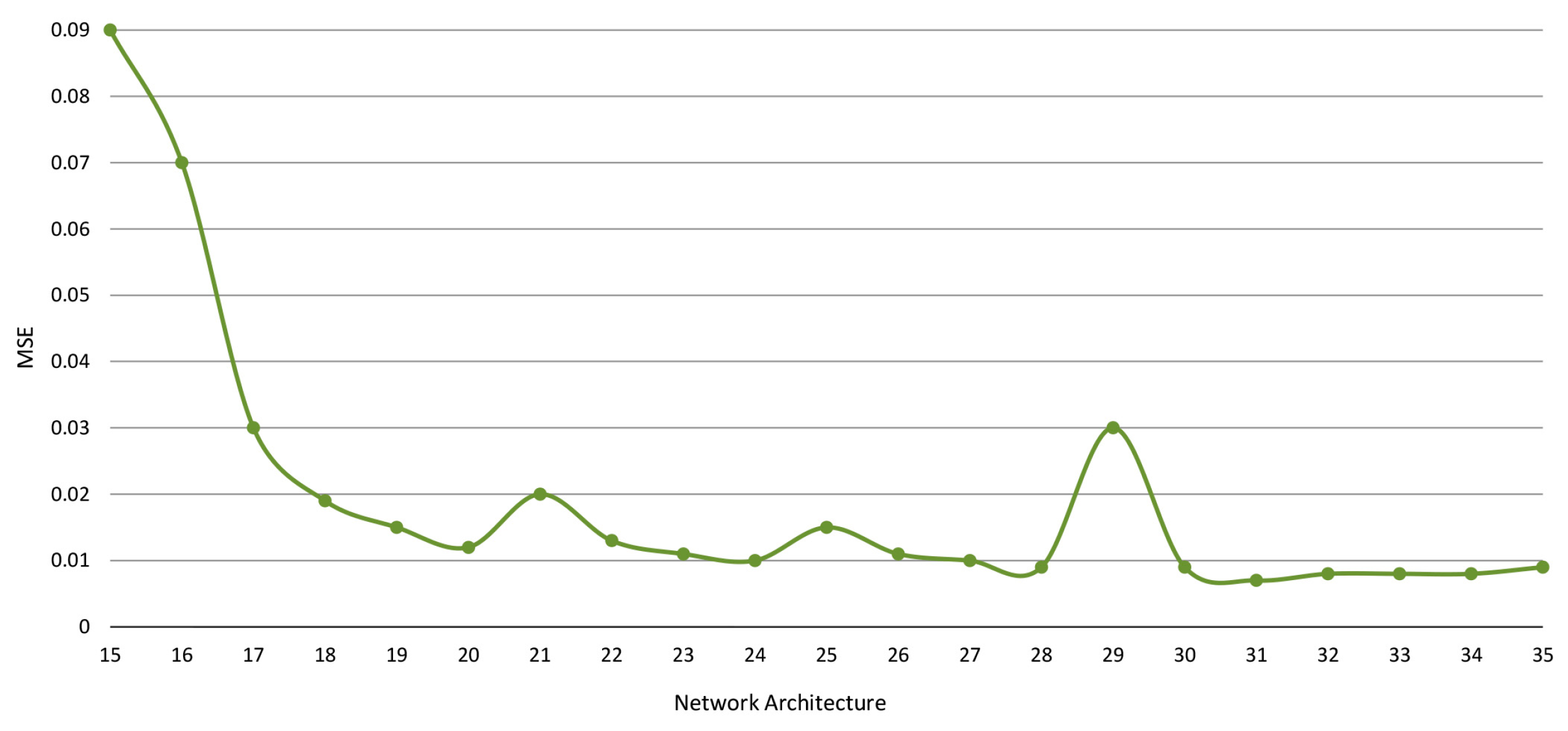
| NN model architecture | 2–7–1 | 6–15–1 | 10–25–1 | 14–31–1 |
| Overall accuracy [%] | 14.28 | 47.61 | 80.95 | 85.71 |
| MSE | 5.60 | 3.20 | 0.06 | 0.008 |
| Ground-Truth | Total | User’s Accuracy% | |||
|---|---|---|---|---|---|
| Cut | Uncut | ||||
| Predicted | Cut | 6 | 1 | 7 | 85.71 |
| Uncut | 2 | 12 | 14 | 85.71 | |
| Total | 8 | 13 | 21 | ||
| Producer’s Accuracy (%) | 75.00 | 92.30 | |||
| Overall Accuracy (%) | 85.71 | ||||
| Cohen’s Kappa | 0.69 | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taravat, A.; Wagner, M.P.; Oppelt, N. Automatic Grassland Cutting Status Detection in the Context of Spatiotemporal Sentinel-1 Imagery Analysis and Artificial Neural Networks. Remote Sens. 2019, 11, 711. https://doi.org/10.3390/rs11060711
Taravat A, Wagner MP, Oppelt N. Automatic Grassland Cutting Status Detection in the Context of Spatiotemporal Sentinel-1 Imagery Analysis and Artificial Neural Networks. Remote Sensing. 2019; 11(6):711. https://doi.org/10.3390/rs11060711
Chicago/Turabian StyleTaravat, Alireza, Matthias P. Wagner, and Natascha Oppelt. 2019. "Automatic Grassland Cutting Status Detection in the Context of Spatiotemporal Sentinel-1 Imagery Analysis and Artificial Neural Networks" Remote Sensing 11, no. 6: 711. https://doi.org/10.3390/rs11060711